

A List Scheduling Algorithm for Heterogeneous Computing Systems Using Improved Predict Cost Matrix for Task Prioritizing
-
摘要: 异构计算系统执行应用效率的提高高度依赖有效的调度算法。该文提出一种新的列表调度算法,称为改进的预测优先任务和乐观处理器选择调度(IPPOSS)。通过在任务优先级排序阶段引入任务的后向预测成本,来减少调度长度。与现有工作相比,该文使用改进预测成本矩阵(IPCM),更合理地进行了任务优先级排序,从而在处理器选择阶段获得了更好的解,并保持2次时间复杂度。IPCM考虑了任务优先级排序阶段的各种计算、通信因素,比预测优先任务调度(PPTS)提出的预测成本矩阵(PCM)更容易获得合理的优先级列表。随机生成应用的有向无环图(DAG)和真实世界应用的DAG的实验结果分析表明,IPPOSS的性能优于相关算法。Abstract: The improvement of application efficiency of heterogeneous computing systems is highly dependent on effective scheduling algorithms. A new list scheduling algorithm called Improved Predict Priority and Optimistic processor Selection Scheduling (IPPOSS) is proposed by this paper. By introducing the backward prediction cost of tasks in task prioritizing phase, the scheduling length is reduced. Compared with the existing work, an Improved Predict Cost Matrix (IPCM) is adopted to prioritize tasks more reasonably and a better solution in processor selection phase when keeping quadratic time complexity is obtain. IPCM, which considers various calculation and communication factors in the task prioritization stage, is easier to obtain a reasonable priority list than Predict Cost Matrix (PCM) proposed by Predict Priority Task Scheduling (PPTS). That the performance of IPPOSS is better than related algorithms is shown by the analysis of the experimental results of randomly generated application Directed Acyclic Graphs (DAGs) and real-world application DAGs.
-
Key words:
- Heterogeneous systems /
- Parallel computing /
- List scheduling /
- Static scheduling
-
表 1 计算消耗
任务 p1 p2 p3 t1 6 45 4 t2 13 12 34 t3 45 23 34 t4 5 33 4 t5 3 16 42 t6 23 54 7 t7 99 56 34 t8 54 13 44 t9 75 13 87 t10 84 32 37  下载: 导出CSV
下载: 导出CSV
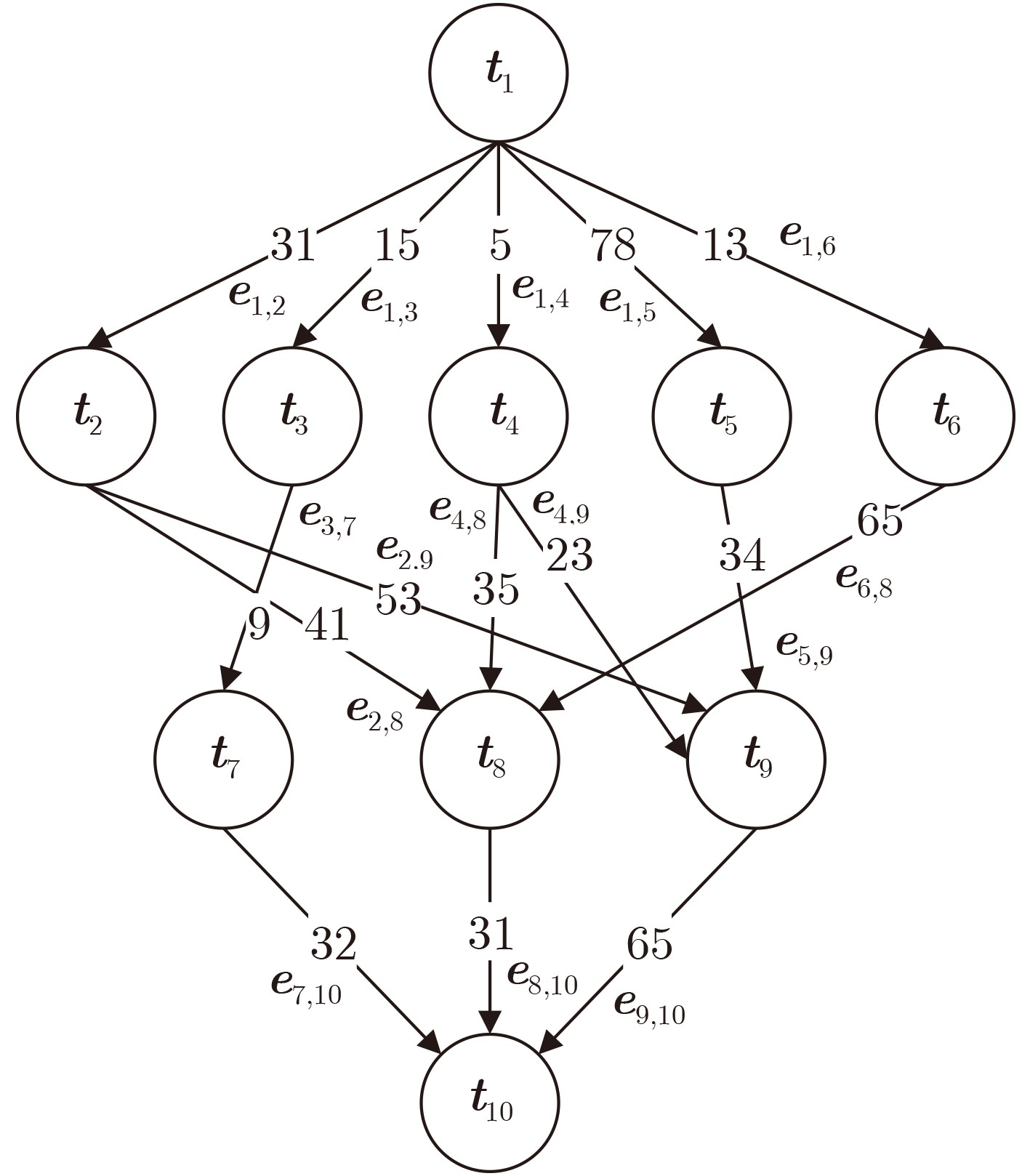
表 2 图 1 中 DAG1 的 IPCM
任务 p1 p2 p3 t1 218 242 214 t2 156 102 177 t3 196 174 176 t4 130 123 129 t5 127 106 166 t6 178 144 162 t7 195 120 108 t8 149 77 118 t9 204 77 161 t10 84 32 37
下载: 导出CSV
表 3 图 1 中 DAG1 的各算法任务优先级列表
任务 ${\text{ran}}{{\text{k}}_\mu }$ ${\text{ran}}{{\text{k}}_{{\text{OCT}}}}$ ${\text{ran}}{{\text{k}}_{{\text{PCM}}}}$ ${\text{ran}}{{\text{k}}_{{\text{IPCM}}}}$ t1 325.0 114.0 224.0 224.7 t2 247.0 80.3 137.3 145.0 t3 189.0 77.0 182.0 182.0 t4 211.3 68.3 145.7 127.3 t5 228.7 67.7 128.7 133.0 t6 212.0 78.7 162.7 161.3 t7 146.0 44.3 122.7 141.0 t8 119.0 44.0 97.7 114.7 t9 174.3 51.0 120.3 147.3 t10 51.0 0 51.0 51.0
下载: 导出CSV
表 4 不同方法的SLR对比(%)
PEFT PPTS IPPOSS with EFTOCT 更好 57.50 35.90 16.30 相同 13.40 29.90 41.70 更差 29.10 34.10 42.00 平均降低 1.75 0.13 –0.48
下载: 导出CSV
算法1 IPPOSS算法 (1) 从出口任务到入口任务递归地为每个任务计算${\text{IPCM}}$和${\text{OCT}}$ (2) 计算所有任务的 ${\text{ran}}{{\text{k}}_{{\text{IPCM}}}}$ (3) 更新就绪列表 (4) while 就绪列表非空 do (5) ${{\mathbf{t}}_i} \leftarrow $就绪列表中具有最高 ${\text{ran}}{{\text{k}}_{{\text{IPCM}}}}({{\mathbf{t}}_i})$的任务 (6) for ${{\mathbf{p}}_m} \in {\mathbf{P}}$ (7) 使用基于插入的策略计算${\text{EFT(}}{{\mathbf{t}}_i},{{\mathbf{p}}_m}{\text{)}}$ (8) 计算$ {\text{EF}}{{\text{T}}_{{\text{OCT}}}}({{\mathbf{t}}_i},{{\mathbf{p}}_m}) $ (9) end for (10) 为${{\mathbf{t}}_i}$选择可以最小化$ {\text{EF}}{{\text{T}}_{{\text{OCT}}}}({{\mathbf{t}}_i},{{\mathbf{p}}_m}) $的${{\mathbf{p}}_m}$ (11) 更新就绪列表 (12) end while
下载: 导出CSV
表 5 4种算法的调度长度的成对比较(%)
IPPOSS PPTS PEFT HEFT IPPOSS 更好
相同
更差* 44.9
32.4
22.758.8
26.0
15.266.7
9.7
23.5PPTS 更好
相同
更差22.7
32.4
44.9* 57.3
11.5
31.163.5
9.2
27.3PEFT 更好
相同
更差15.2
26.0
58.831.1
11.5
57.3* 54.2
5.0
40.8HEFT 更好
相同
更差23.5
9.7
66.727.3
9.2
63.540.8
5.0
54.2*
下载: 导出CSV
-
[1] SINNEN O and SOUSA L A. Communication contention in task scheduling[J]. IEEE Transactions on Parallel and Distributed Systems, 2005, 16(6): 503–515. doi: 10.1109/TPDS.2005.64 [2] GAREY M R, JOHNSON D S, and STOCKMEYER L. Some simplified NP-complete problems[C]. The 6th Annual ACM Symposium on Theory of Computing, Seattle, USA, 1974: 47–63. [3] ULLMAN J D. NP-complete scheduling problems[J]. Journal of Computer and System Sciences, 1975, 10(3): 384–393. doi: 10.1016/S0022-0000(75)80008-0 [4] PAPADIMITRIOU C H and YANNAKAKIS M. Scheduling interval-ordered tasks[J]. SIAM Journal on Computing, 1979, 8(3): 405–409. doi: 10.1137/0208031 [5] AGUILAR J and GELENBE E. Task assignment and transaction clustering heuristics for distributed systems[J]. Information Sciences, 1997, 97(1/2): 199–219. doi: 10.1016/S0020-0255(96)00178-8 [6] HUANG Kuochan, GU D S, LIU H C, et al. Task clustering heuristics for efficient execution time reduction in workflow scheduling[J]. Journal of Computers, 2017, 28(1): 43–56. doi: 10.3966/199115592017022801004 [7] TIAN Qiao, LI Jingmei, XUE Di, et al. A hybrid task scheduling algorithm based on task clustering[J]. Mobile Networks and Applications, 2020, 25(4): 1518–1527. doi: 10.1007/s11036-019-01356-x [8] SULAIMAN M, HALIM Z, WAQAS M, et al. A hybrid list-based task scheduling scheme for heterogeneous computing[J]. The Journal of Supercomputing, 2021, 77(9): 10252–10288. doi: 10.1007/s11227-021-03685-9 [9] AHMAD W and ALAM B. An efficient list scheduling algorithm with task duplication for scientific big data workflow in heterogeneous computing environments[J]. Concurrency and Computation:Practice and Experience, 2021, 33(5): e5987. doi: 10.1002/cpe.5987 [10] HAGRAS T, ATEF A, and MAHDY Y B. Greening duplication-based dependent-tasks scheduling on heterogeneous large-scale computing platforms[J]. Journal of Grid Computing, 2021, 19(1): 13. doi: 10.1007/s10723-021-09554-2 [11] TOPCUOGLU H, HARIRI S, and WU Minyou. Performance-effective and low-complexity task scheduling for heterogeneous computing[J]. IEEE Transactions on Parallel and Distributed Systems, 2002, 13(3): 260–274. doi: 10.1109/71.993206 [12] BITTENCOURT L F, SAKELLARIOU R, and MADEIRA E R M. DAG scheduling using a lookahead variant of the heterogeneous earliest finish time algorithm[C]. The 2010 18th Euromicro Conference on Parallel, Distributed and Network-Based Processing, Pisa, Italy, 2010: 27–34. [13] ARABNEJAD H and BARBOSA J G. List scheduling algorithm for heterogeneous systems by an optimistic cost table[J]. IEEE Transactions on Parallel and Distributed Systems, 2014, 25(3): 682–694. doi: 10.1109/TPDS.2013.57 [14] DJIGAL H, FENG Jun, and LU Jiamin. Task scheduling for heterogeneous computing using a predict cost matrix[C]. The 48th International Conference on Parallel Processing: Workshops, Kyoto, Japan, 2019: 25. [15] ZHAO Yi, CAO Suzhi, and YAN Lei. List scheduling algorithm based on pre-scheduling for heterogeneous computing[C]. 2019 IEEE Intl Conf on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking, Xiamen, China, 2019: 588–595. [16] IJAZ S and MUNIR E U. MOPT: List-based heuristic for scheduling workflows in cloud environment[J]. The Journal of Supercomputing, 2019, 75(7): 3740–3768. doi: 10.1007/s11227-018-2726-6 [17] DOROSTKAR F and MIRZAKUCHAKI S. List scheduling for heterogeneous computing systems introducing a performance-effective definition for critical path[C]. The 2019 9th International Conference on Computer and Knowledge Engineering, Mashhad, Iran, 2019: 356–362. [18] JIANG Chao, WANG Jinlin, and YE Xiaozhou. PVBTS: A novel task scheduling algorithm for heterogeneous computing platforms[J]. International Journal of Innovative Computing, Information and Control, 2020, 16(2): 701–713. doi: 10.24507/ijicic.16.02.701 [19] GHOLAMI H and ZAKERIAN R. A list-based heuristic algorithm for static task scheduling in heterogeneous distributed computing systems[C]. The 2020 6th International Conference on Web Research, Tehran, Iran, 2020: 21–26. [20] HU Wei, GAN Yu, LV Xiangyu, et al. A improved list heuristic scheduling algorithm for heterogeneous computing systems[C]. 2020 IEEE International Conference on Systems, Man, and Cybernetics, Toronto, Canada, 2020: 1111–1116. [21] HU Wei, GAN Yu, WEN Yuan, et al. An improved heterogeneous dynamic list schedule algorithm[C]. The 20th International Conference on Algorithms and Architectures for Parallel Processing, New York City, USA, 2020: 159–173. [22] DJIGAL H, FENG Jun, LU Jiamin, et al. IPPTS: An efficient algorithm for scientific workflow scheduling in heterogeneous computing systems[J]. IEEE Transactions on Parallel and Distributed Systems, 2021, 32(5): 1057–1071. doi: 10.1109/TPDS.2020.3041829 [23] SHI Zhiao, JEANNOT E, and DONGARRA J J. Robust task scheduling in non-deterministic heterogeneous computing systems[C]. 2006 IEEE International Conference on Cluster Computing, Barcelona, Spain, 2006: 1–10. [24] frs69wq. DAGGEN: A synthetic task graph generator[EB/OL].https://github.com/frs69wq/daggen, 2021. [25] AMOURA A K, BAMPIS E, and KONIG J C. Scheduling algorithms for parallel Gaussian elimination with communication costs[J]. IEEE Transactions on Parallel and Distributed Systems, 1998, 9(7): 679–686. doi: 10.1109/71.707547 [26] JIANG Qingye, LEE Y C, ARENAZ M, et al. Optimizing scientific workflows in the cloud: A montage example[C]. The 2014 IEEE/ACM 7th International Conference on Utility and Cloud Computing, London, UK, 2014: 517–522. -



图(7) / 表(6)
计量
- 文章访问数: 1558
- HTML全文浏览量: 891
- PDF下载量: 152
- 被引次数: 0
 下载:
下载:
