

MARL-based Design of Multi-Unmanned Aerial Vehicle Assisted Communication System with Hybrid Gaming Mode
-
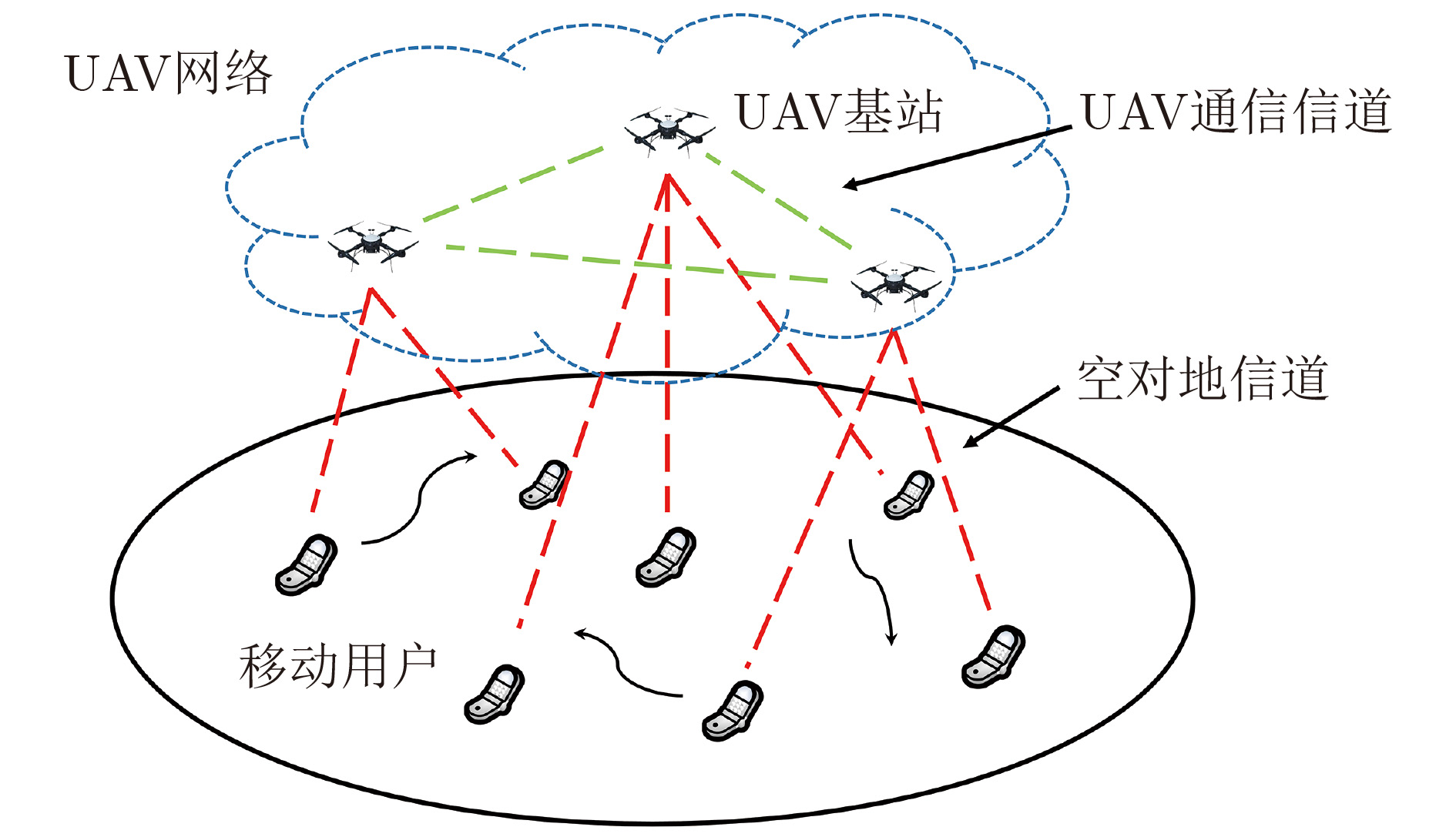
摘要: 空天地一体化通信作为未来6G的发展方向,很好地弥补了当前无线通信覆盖不足的弊端。该文提出一种基于多智能体强化学习(MARL)的多无人机(Multi-UAV)辅助通信算法,在用户与无人机(UAVs)构成的混合博弈模式下求解纳什均衡近似解,解决了动态环境下UAVs轨迹设计、多维资源调度以及用户接入策略联合优化问题。结合马尔可夫博弈概念建模该连续决策过程,以集中训练分布式执行(CTDE)机制,将近端策略优化(PPO)算法扩展到多智能体领域。针对离散与连续共存的动作空间设计了两种策略输出模式,并且结合Beta策略改进实现,最后通过仿真实验验证了算法的有效性。Abstract: As the future development direction of 6G, integrated space-air-ground communication well compensates for the drawback of insufficient current wireless communication coverage. In this paper, a Multi-Unmanned Aerial Vehicle (Multi-UAV) assisted communication algorithm with Multi-Agent Reinforcement Learning (MARL) is proposed to solve the Nash equilibrium approximate solution in a hybrid game model composed of users and UAVs and solve the joint optimization problem of UAV trajectory design, multidimensional resource scheduling and user access strategy in dynamic environment. The Markov game concept is exploited to model this continuous decision process with a Centralized Training Distributed Execution (CTDE) mechanism, and the Proximal Policy Optimization (PPO) algorithm is extended to the multi-agent domain. Two policy output modes are designed for the action space, where both the discrete and continuous actions coexist. Then, the implementation is improved by combining Beta policy. Finally, the effectiveness of the algorithm is verified by simulation experiments.
-
表 1 多无人机辅助通信的Beta-MAPPO算法
输入: 初始化各类神经网络参数,经验缓存区$\mathcal{B}$,以及其余相关参数、超参数 输出: 训练完善的GU, UAV策略网络 (1) for episode do (2) 初始化经验缓存$\mathcal{B}$以及所有GU与UAV位置 (3) for step t do (4) 所有GU根据当前状态$ \boldsymbol{o}_t^n $选择UAV接入 (5) 所有UAV根据当前状态$\boldsymbol{o}_t^m$选择飞行方向和资源分配方案 (6) 各自得到奖励反馈$r_t^i$,储存经验元组$(\boldsymbol{o}_t^i,\;\boldsymbol{a}_t^i,\;\boldsymbol{s}_t^i,\;r_t^i,{\rm{pr}}_t^i)$到$\mathcal{B}$,然后转移到下一个状态${\boldsymbol{s}_{t + 1}}$ (7) if buffer $\mathcal{B}$ is full then (8) for all agent i do (9) 用GAE方式计算优势函数$ \tilde A_t^i $与目标状态值函数${V_{\rm target}}(s_t^i)$ (10) for update epoch ${n_r}$ do (11) 从$\mathcal{B}$中采样数据依据式(19)更新Actor网络参数$\theta $或$\phi $ (12) 依据式(18)更新Critic网络参数${\omega _1}$或${\omega _2}$ (13) end for (14) end for (15) 清空经验缓存区$\mathcal{B}$ (16) end if (17) end for (18) end for  下载: 导出CSV
下载: 导出CSV
表 2 算法相关参数
参数名称 值 裁剪参数$\varepsilon $ 0.2 熵奖励系数$\psi $ 0.01 GAE参数$\lambda $ 0.97 折扣因子$\gamma $ 0.998 数据复用次数${n_r}$ 5 优化器 Adam GU激活函数 Tanh, Softmax UAV激活函数 Tanh, Softplus Mini_batch数量 4 缓存区大小 4096 学习率 3e-4 奖励系数$ {r_c} $ 1 奖励系数$ {r_d} $ 2 考虑前w个时刻的UAV负载 3 指数参数${\kappa _r}$ 5 UAV边界惩罚函数参数$ {r_b} $ 20 UAV边界惩罚函数参数${\kappa _b}$ 8e-2
下载: 导出CSV
-
[1] YOU Xiaohu, WANG Chengxiang, HUANG Jie, et al. Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts[J]. Science China Information Sciences, 2021, 64(1): 110301. doi: 10.1007/s11432-020-2955-6 [2] SEKANDER S, TABASSUM H, and HOSSAIN E. Multi-tier drone architecture for 5G/B5G cellular networks: Challenges, trends, and prospects[J]. IEEE Communications Magazine, 2018, 56(3): 96–103. doi: 10.1109/MCOM.2018.1700666 [3] MISHRA D and NATALIZIO E. A survey on cellular-connected UAVs: Design challenges, enabling 5G/B5G innovations, and experimental advancements[J]. Computer Networks, 2020, 182: 107451. doi: 10.1016/j.comnet.2020.107451 [4] ZHAO Jianwei, LIU Jun, JIANG Jing, et al. Efficient deployment with geometric analysis for mmWave UAV communications[J]. IEEE Wireless Communications Letters, 2020, 9(7): 1115–1119. doi: 10.1109/LWC.2020.2982637 [5] LI Bin, FEI Zesong, and ZHANG Yan. UAV communications for 5G and beyond: Recent advances and future trends[J]. IEEE Internet of Things Journal, 2019, 6(2): 2241–2263. doi: 10.1109/JIOT.2018.2887086 [6] 赵太飞, 林亚茹, 马倩文, 等. 无人机编队中无线紫外光隐秘通信的能耗均衡算法[J]. 电子与信息学报, 2020, 42(12): 2969–2975. doi: 10.11999/JEIT190965ZHAO Taifei, LIN Yaru, MA Qianwen, et al. Energy balance algorithm for wireless ultraviolet secret communication in UAV formation[J]. Journal of Electronics &Information Technology, 2020, 42(12): 2969–2975. doi: 10.11999/JEIT190965 [7] WANG Yining, CHEN Mingzhe, YANG Zhaohui, et al. Deep learning for optimal deployment of UAVs with visible light communications[J]. IEEE Transactions on Wireless Communications, 2020, 19(11): 7049–7063. doi: 10.1109/TWC.2020.3007804 [8] 徐勇军, 刘子腱, 李国权, 等. 基于NOMA的无线携能D2D通信鲁棒能效优化算法[J]. 电子与信息学报, 2021, 43(5): 1289–1297. doi: 10.11999/JEIT200175XU Yongjun, LIU Zijian, LI Guoquan, et al. Robust energy efficiency optimization algorithm for NOMA-based D2D communication with simultaneous wireless information and power transfer[J]. Journal of Electronics &Information Technology, 2021, 43(5): 1289–1297. doi: 10.11999/JEIT200175 [9] ZHAN Cheng, ZENG Yong, and ZHANG Rui. Trajectory design for distributed estimation in UAV-enabled wireless sensor network[J]. IEEE Transactions on Vehicular Technology, 2018, 67(10): 10155–10159. doi: 10.1109/TVT.2018.2859450 [10] SHEN Xinyue and GU Yuantao. Nonconvex sparse logistic regression with weakly convex regularization[J]. IEEE Transactions on Signal Processing, 2018, 66(12): 3199–3211. doi: 10.1109/TSP.2018.2824289 [11] CUI Fangyu, CAI Yunlong, QIN Zhijin, et al. Multiple access for mobile-UAV enabled networks: Joint trajectory design and resource allocation[J]. IEEE Transactions on Communications, 2019, 67(7): 4980–4994. doi: 10.1109/TCOMM.2019.2910263 [12] SAWALMEH A, OTHMAN N S, SHAKHATREH H, et al. Providing wireless coverage in massively crowded events using UAVs[C]. 2017 IEEE 13th Malaysia International Conference on Communications (MICC), Johor Bahru, Malaysia, 2017: 158–163. doi: 10.1109/MICC.2017.8311751. [13] SHAKHATREH H, KHREISHAH A, ALSARHAN A, et al. Efficient 3D placement of a UAV using particle swarm optimization[C]. 2017 8th International Conference on Information and Communication Systems (ICICS), Irbid, Jordan, 2017: 258–263. doi: 10.1109/IACS.2017.7921981. [14] SAXENA V, JALDÉN J, and KLESSIG H. Optimal UAV base station trajectories using flow-level models for reinforcement learning[J]. IEEE Transactions on Cognitive Communications and Networking, 2019, 5(4): 1101–1112. doi: 10.1109/TCCN.2019.2948324 [15] LIU Xiao, LIU Yuanwei, and CHEN Yue. Reinforcement learning in multiple-UAV networks: Deployment and movement design[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 8036–8049. doi: 10.1109/TVT.2019.2922849 [16] WANG Qiang, ZHANG Wenqi, LIU Yuanwei, et al. Multi-UAV dynamic wireless networking with deep reinforcement learning[J]. IEEE Communications Letters, 2019, 23(12): 2243–2246. doi: 10.1109/LCOMM.2019.2940191 [17] CAO Yang, ZHANG Lin, and LIANG Yingchang. Deep reinforcement learning for multi-user access control in UAV networks[C]. ICC 2019 - 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 2019: 1–6. doi: 10.1109/ICC.2019.8761794. [18] YU Chao, VELU A, VINITSKY E, et al. The surprising effectiveness of PPO in cooperative, multi-agent games[J]. arXiv preprint arXiv: 2103.01955, 2021. [19] CHOU P W, MATURANA D, and SCHERER S. Improving stochastic policy gradients in continuous control with deep reinforcement learning using the Beta distribution[C]. Proceedings of the 34th International Conference on Machine Learning, Sydney, Australia, 2017: 834–843. [20] ENGSTROM L, ILYAS A, SANTURKAR S, et al. Implementation matters in deep policy gradients: A case study on PPO and TRPO[C]. International Conference on Learning Representations(ICLR), Addis Ababa, Ethiopia, 2020: 1–14. [21] SMITH S L, KINDERMANS P J, YING C, et al. Don’t decay the learning rate, increase the batch size[C]. International Conference on Learning Representations (ICLR), Vancouver, Canada, 2018: 1–11. -

 下载:
下载:





图(7) / 表(2)
计量
- 文章访问数: 3358
- HTML全文浏览量: 2353
- PDF下载量: 386
- 被引次数: 0
