

Small Target Detection on Sea Surface Based on Label Propagation Algorithm
-
摘要: 在高分辨体制下海杂波与海面小目标具有复杂的特性,特别是对于雷达散射截面积较小的海面漂浮目标,传统的检测方法性能不佳。为了突破临界信杂比情况下的检测性能,可以提取雷达回波的一种或者多种特征,从而进行特征检测,该方法是实现临界信杂比情况下有效检测的重要途经。目前,在3维及以下的特征空间中可以使用凸包学习算法计算判决区域并有效地控制虚警概率,但是在3维以上的特征空间中凸包学习算法计算复杂度提高,难以进行检测。针对这个问题,该文提出一种基于标签传播算法的海面小目标检测方法,它突破了凸包学习算法的维数限制和决策域必须为凸集的形状限制,能够在高维特征空间进行检测并有效地控制虚警。经过实测数据集验证,基于标签传播算法的海面小目标检测方法在0.512 s和1.024 s的观测时间内分别获得了88.4%和92.0%的检测概率,相比于基于K近邻(KNN)的检测器有了3.3%和2.8%的检测概率提升。Abstract: Sea clutter and small targets have complex characteristics in the high-resolution radar system. For the target with small radar cross section, the traditional detection method has limited detection performance. In order to break through the critical signal to clutter ratio state, one or more features of radar echo can be extracted for joint feature detection, which is an important way to achieve effective detection in the case of critical signal to clutter ratio. At present, convex hull learning algorithm can be used to calculate the decision region and control effectively the false alarm probability in the feature space of three dimensions and below, but the computational complexity of convex hull learning algorithm is increased above the feature space, and make it difficult to detect target. To solve this problem, a small target detection method based on label propagation algorithm is proposed. It can detect small target in high-dimensional feature space and the false alarm can be effectively controlled. The experimental results on the actual database show, the detection probabilities of 88.4% and 92.0% are obtained in 0.512 s and 1.024 s respectively, which are 3.3% and 2.8% higher than those of the K-Nearest Neighbor (KNN) detector.
-
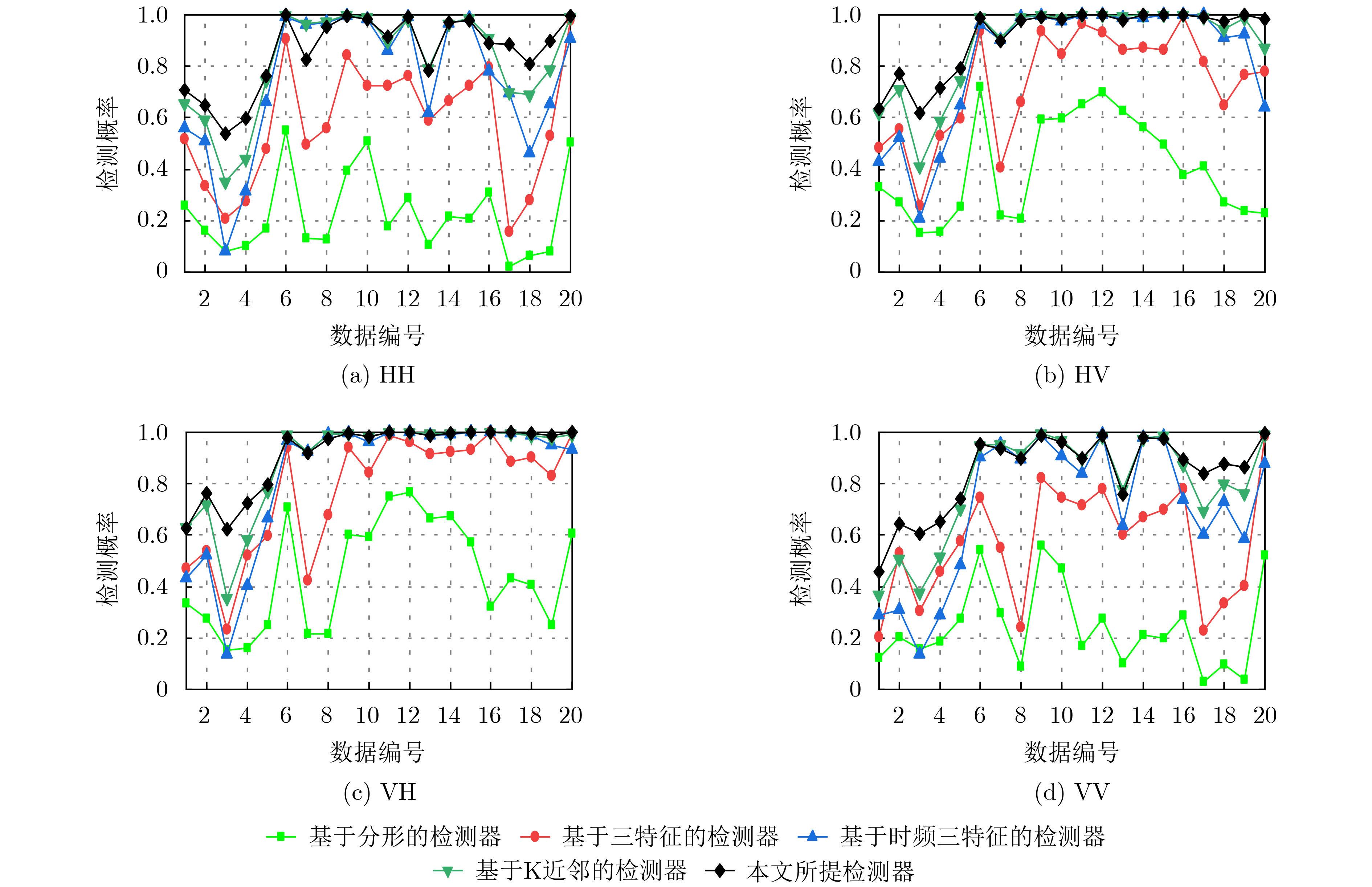
表 1 IPIX数据集中20组数据平均检测结果对比
检测器 观测时间(s) HH HV VH VV 平均 基于分形的检测器 0.512 0.223 0.404 0.448 0.241 0.329 1.024 0.301 0.536 0.576 0.328 0.435 基于三特征的检测器 0.512 0.577 0.736 0.776 0.569 0.665 1.024 0.622 0.797 0.813 0.598 0.708 基于时频三特征的检测器 0.512 0.747 0.826 0.842 0.706 0.780 1.024 0.821 0.882 0.877 0.789 0.842 基于K近邻的检测器 0.512 0.821 0.887 0.895 0.800 0.851 1.024 0.868 0.922 0.921 0.858 0.892 本文所提检测器 0.512 0.857 0.916 0.918 0.846 0.884 1.024 0.906 0.941 0.938 0.893 0.920  下载: 导出CSV
下载: 导出CSV
表 3 去掉每一种特征时的6特征检测器性能损失(%)
去掉的特征 NHE RAA RDPH RVE RI MS NR 性能损失 HH 2.14 1.72 4.90 1.40 1.09 3.99 1.41 HV 1.93 1.34 2.88 1.13 0.92 2.42 1.00 VH 1.90 1.06 2.71 0.83 0.57 2.04 0.63 VV 2.52 1.99 5.12 1.54 1.02 4.54 1.59 平均 2.12 1.53 3.90 1.22 0.90 3.25 1.16
下载: 导出CSV
-
[1] 许述文, 白晓惠, 郭子薰, 等. 海杂波背景下雷达目标特征检测方法的现状与展望[J]. 雷达学报, 2020, 9(4): 684–714. doi: 10.12000/JR20084XU Shuwen, BAI Xiaohui, GUO Zixun, et al. Status and prospects of feature-based detection methods for floating targets on the sea surface[J]. Journal of Radars, 2020, 9(4): 684–714. doi: 10.12000/JR20084 [2] HU Jing, TUNG W W, and GAO Jianbo. Detection of low observable targets within sea clutter by structure function based multifractal analysis[J]. IEEE Transactions on Antennas and Propagation, 2006, 54(1): 136–143. doi: 10.1109/TAP.2005.861541 [3] 陈小龙, 刘宁波, 王国庆, 等. 基于高斯短时分数阶Fourier变换的海面微动目标检测方法[J]. 电子学报, 2014, 42(5): 971–977. doi: 10.3969/j.issn.0372-2112.2014.05.021CHEN Xiaolong, LIU Ningbo, WANG Guoqing, et al. Gaussian short-time fractional Fourier transform based detection algorithm of target with micro-motion at sea[J]. Acta Electronica Sinica, 2014, 42(5): 971–977. doi: 10.3969/j.issn.0372-2112.2014.05.021 [4] SHI Sainan and SHUI Penglang. Sea-surface floating small target detection by one-class classifier in time-frequency feature space[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(11): 6395–6411. doi: 10.1109/TGRS.2018.2838260 [5] XU Shuwen, ZHENG Jibin, PU Jia, et al. Sea-surface floating small target detection based on polarization features[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(10): 1505–1509. doi: 10.1109/LGRS.2018.2852560. [6] SHUI Penglang, LI Dongchen, and XU Shuwen. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1416–1430. doi: 10.1109/TAES.2014.120657 [7] 时艳玲, 姚婷婷, 郭亚星. 基于图连通密度的海面漂浮小目标检测[J]. 电子与信息学报, 2021, 43(11): 3185–3192. doi: 10.11999/JEIT201028SHI Yanling, YAO Tingting, and GUO Yaxing. Floating small target detection based on graph connected density in sea surface[J]. Journal of Electronics and Information Technology, 2021, 43(11): 3185–3192. doi: 10.11999/JEIT201028 [8] 贺丰收, 何友, 刘准钆, 等. 卷积神经网络在雷达自动目标识别中的研究进展[J]. 电子与信息学报, 2020, 42(1): 119–131. doi: 10.11999/JEIT180899HE Fengshou, HE You, LIU Zhunga, et al. Research and development on applications of convolutional neural networks of radar automatic target recognition[J]. Journal of Electronics &Information Technology, 2020, 42(1): 119–131. doi: 10.11999/JEIT180899 [9] 杜兰, 魏迪, 李璐, 等. 基于半监督学习的SAR目标检测网络[J]. 电子与信息学报, 2020, 42(1): 154–163. doi: 10.11999/JEIT190783DU Lan, WEI Di, LI Lu, et al. SAR target detection network via semi-supervised learning[J]. Journal of Electronics &Information Technology, 2020, 42(1): 154–163. doi: 10.11999/JEIT190783 [10] 苏宁远, 陈小龙, 关键, 等. 基于卷积神经网络的海上微动目标检测与分类方法[J]. 雷达学报, 2018, 7(5): 565–574. doi: 10.12000/JR18077SU Ningyuan, CHEN Xiaolong, GUAN Jian, et al. Detection and classification of maritime target with micro-motion based on CNNs[J]. Journal of Radars, 2018, 7(5): 565–574. doi: 10.12000/JR18077 [11] SHUI Penglang, GUO Zixun, and SHI Sainan. Feature-compression-based detection of sea-surface small targets[J]. IEEE Access, 2020, 8: 8371–8385. doi: 10.1109/ACCESS.2019.2962793 [12] LI Yuzhou, XIE Pengcheng, TANG Zeshen, et al. SVM-based sea-surface small target detection: a false-alarm-rate-controllable approach[J]. IEEE Geoscience and Remote Sensing Letters, 2019, 16(8): 1225–1229. doi: 10.1109/LGRS.2019.2894385 [13] ZHOU Hongkuan and JIANG Tao. Decision tree based sea-surface weak target detection with false alarm rate controllable[J]. IEEE Signal Processing Letters, 2019, 26(6): 793–797. doi: 10.1109/LSP.2019.2909584 [14] 郭子薰, 水鹏朗, 白晓惠, 等. 海杂波中基于可控虚警K近邻的海面小目标检测[J]. 雷达学报, 2020, 9(4): 654–663. doi: 10.12000/JR20055GUO Zixun, SHUI Penglang, BAI Xiaohui, et al. Sea-surface small target detection based on K-NN with controlled false alarm rate in sea clutter[J]. Journal of Radars, 2020, 9(4): 654–663. doi: 10.12000/JR20055 [15] 张俊丽, 常艳丽, 师文. 标签传播算法理论及其应用研究综述[J]. 计算机应用研究, 2013, 30(1): 21–25. doi: 10.3969/j.issn.1001-3695.2013.01.004ZHANG Junli, CHANG Yanli, and SHI Wen. Overview on label propagation algorithm and applications[J]. Application Research of Computers, 2013, 30(1): 21–25. doi: 10.3969/j.issn.1001-3695.2013.01.004 [16] Cognitive Systems Laboratory. IPIX radar database[EB/OL]. http://soma.mcmaster.ca//ipix.php, 2012. [17] 中国雷达行业协会. 雷达对海探测数据[EB/OL]. http://radars.ie.ac.cn/web/data/getData?dataType=DatasetofRadarDetectingSea, 2020. -

 下载:
下载:




图(7) / 表(3)
计量
- 文章访问数: 1777
- HTML全文浏览量: 808
- PDF下载量: 211
- 被引次数: 0
