

Contour Matching Method for SAR Images Based on Salient Contour Features
-
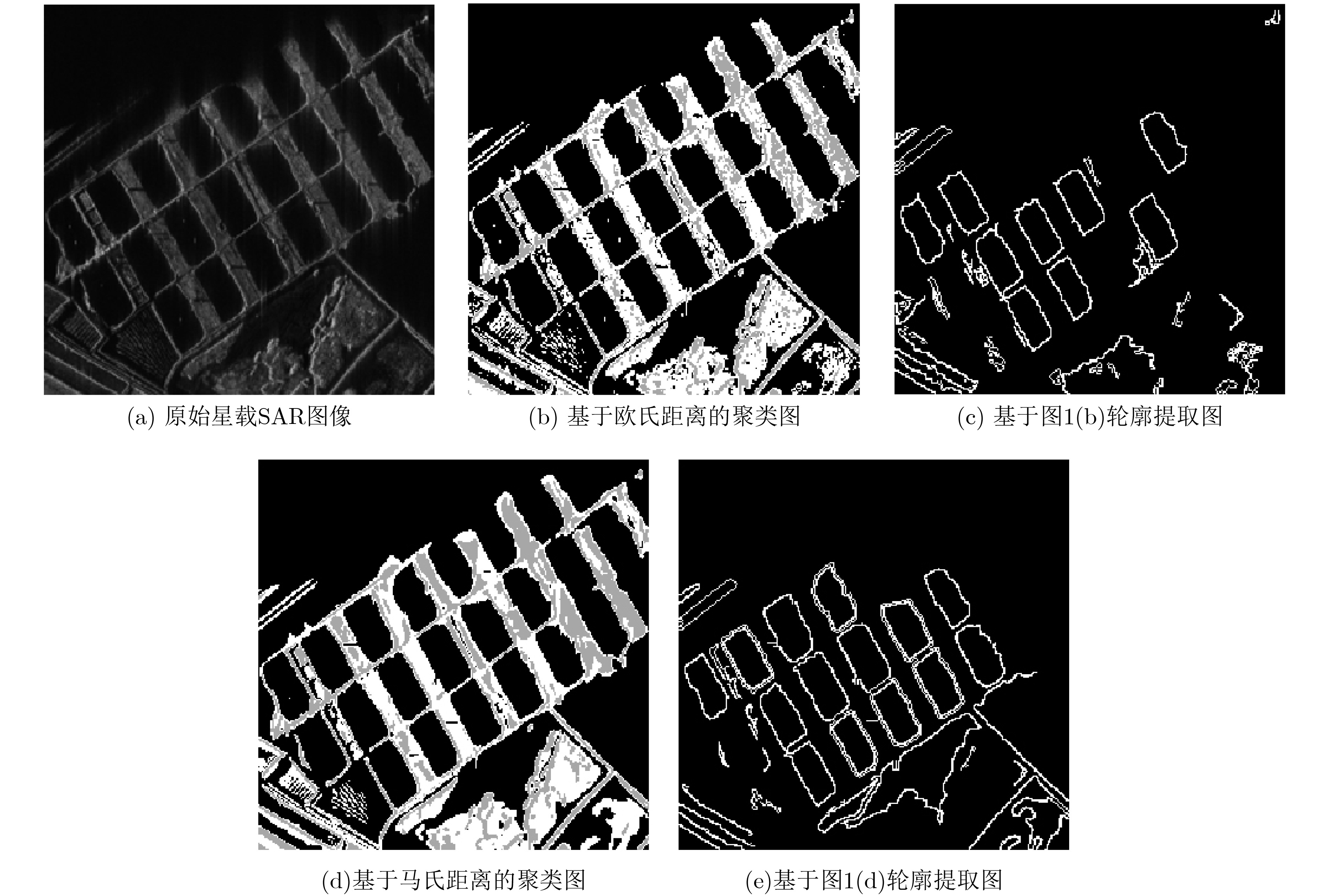
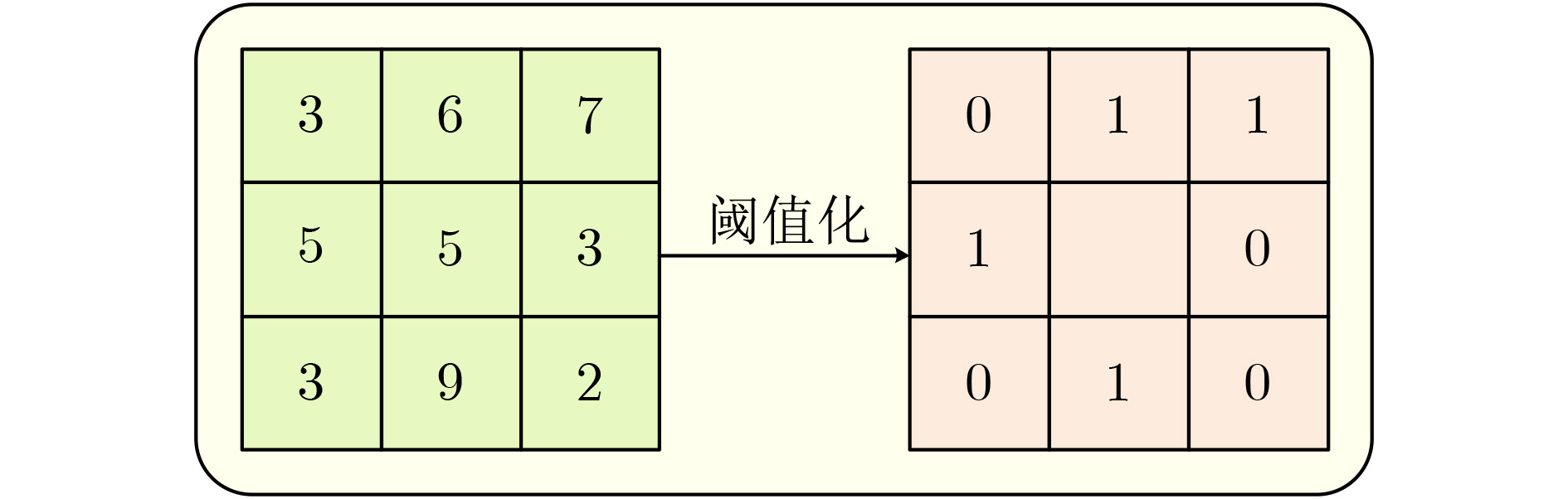
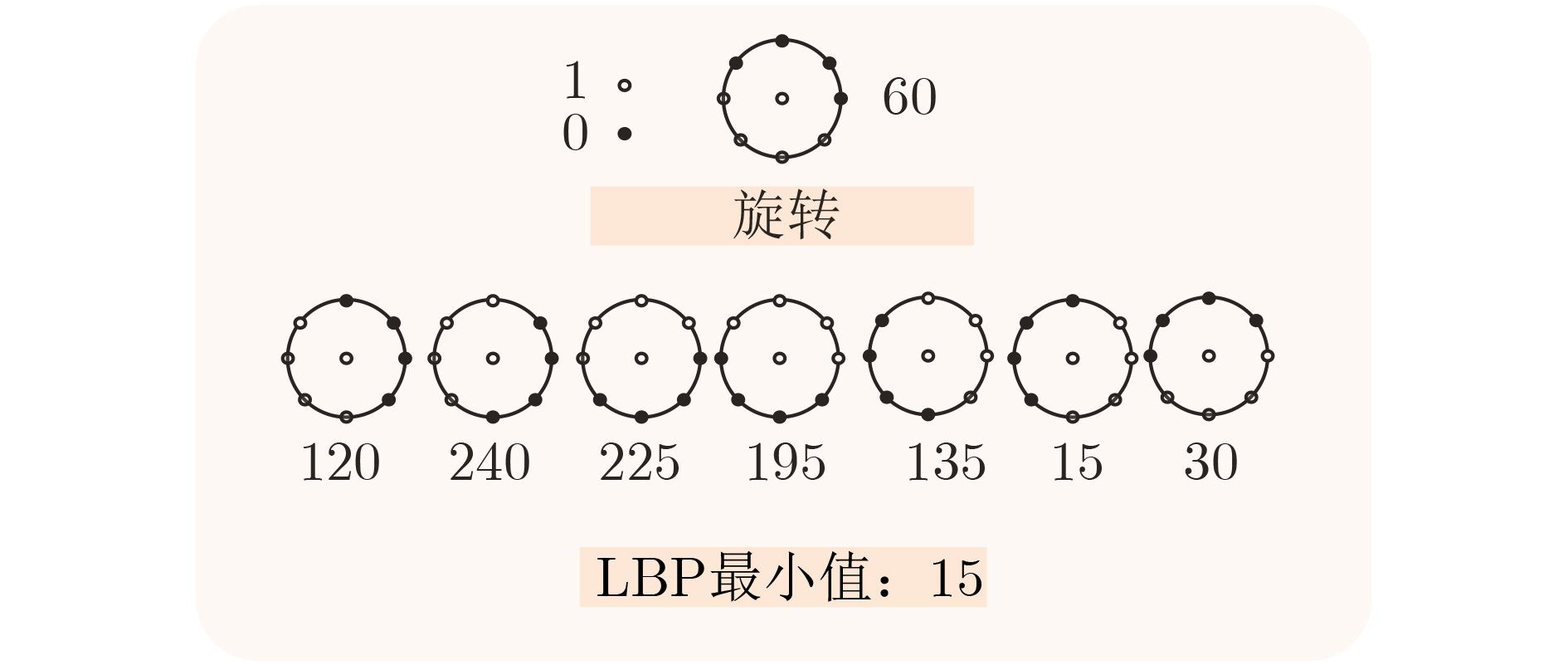
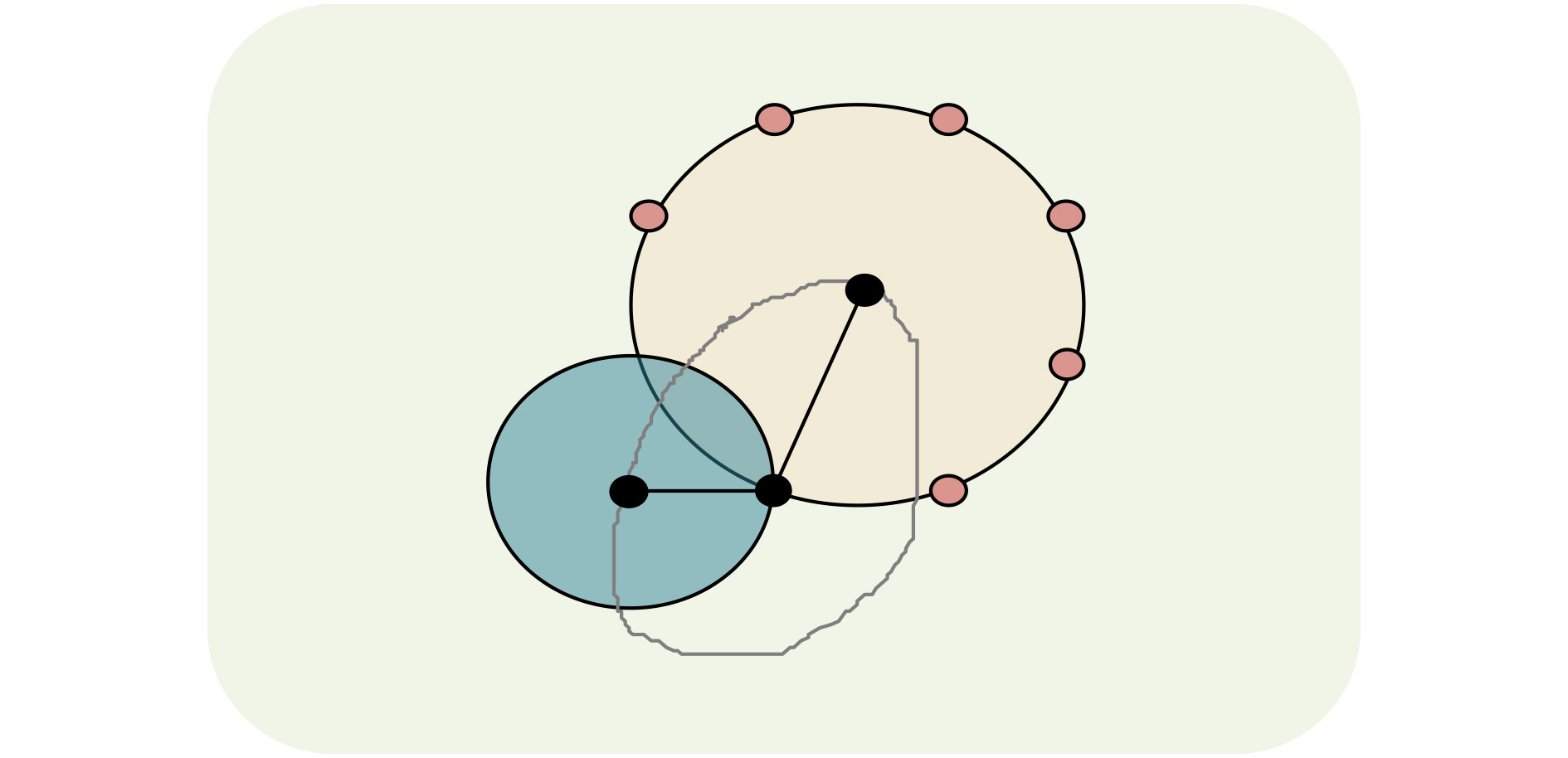
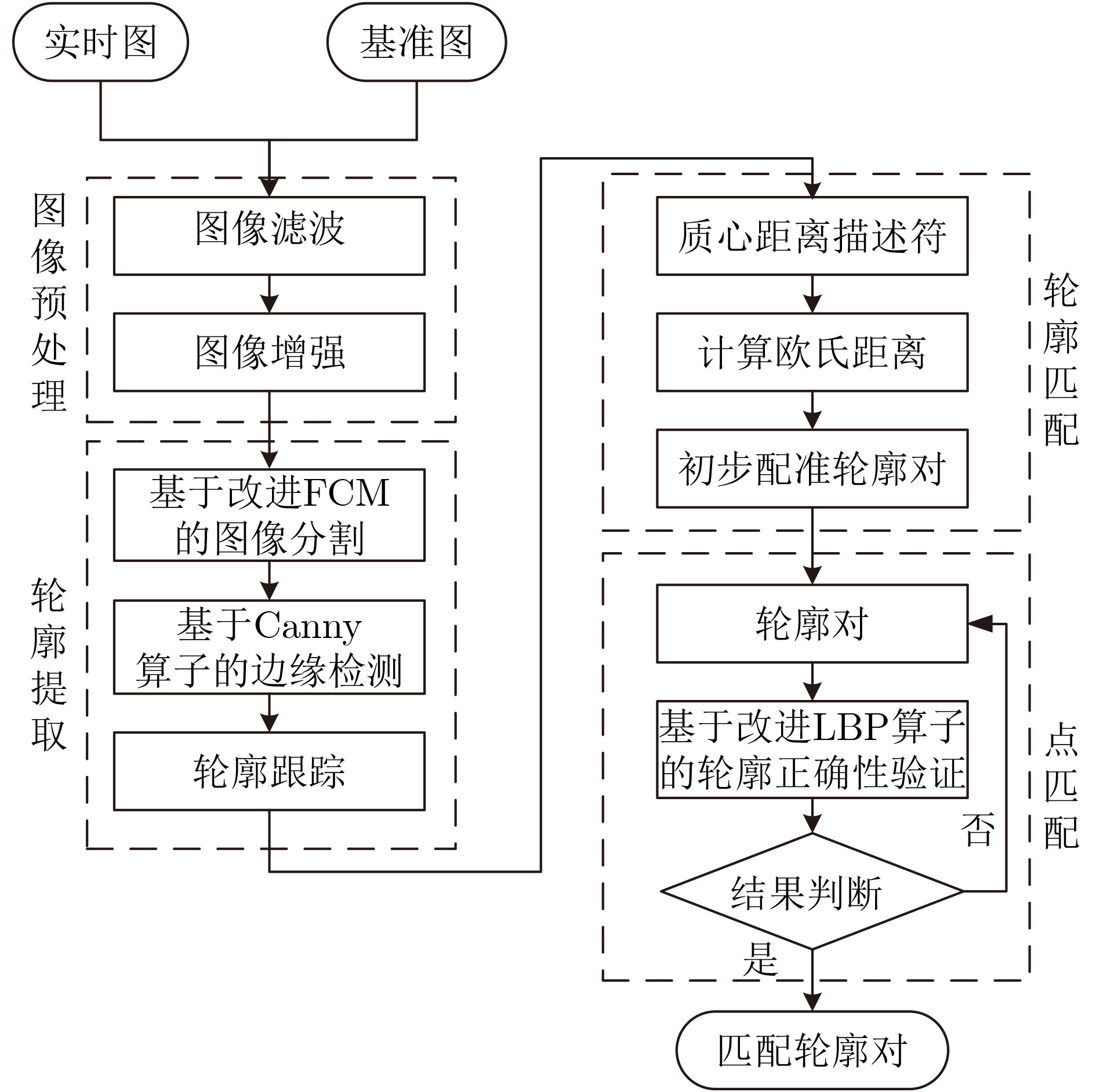
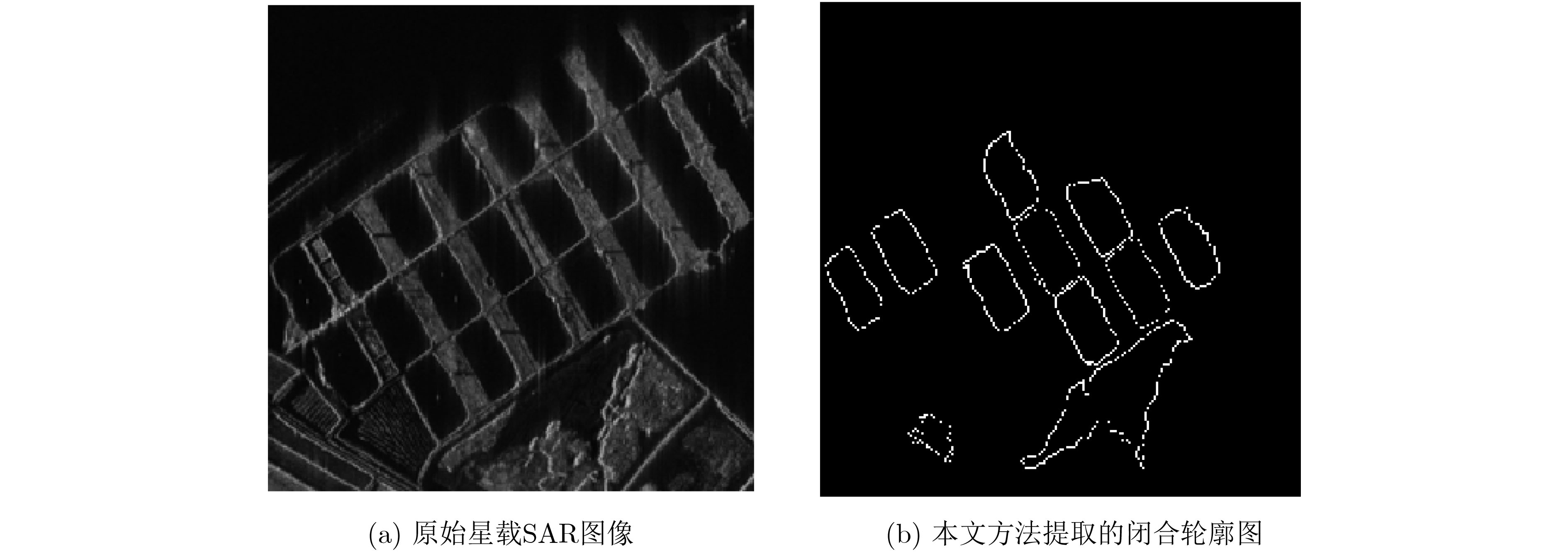
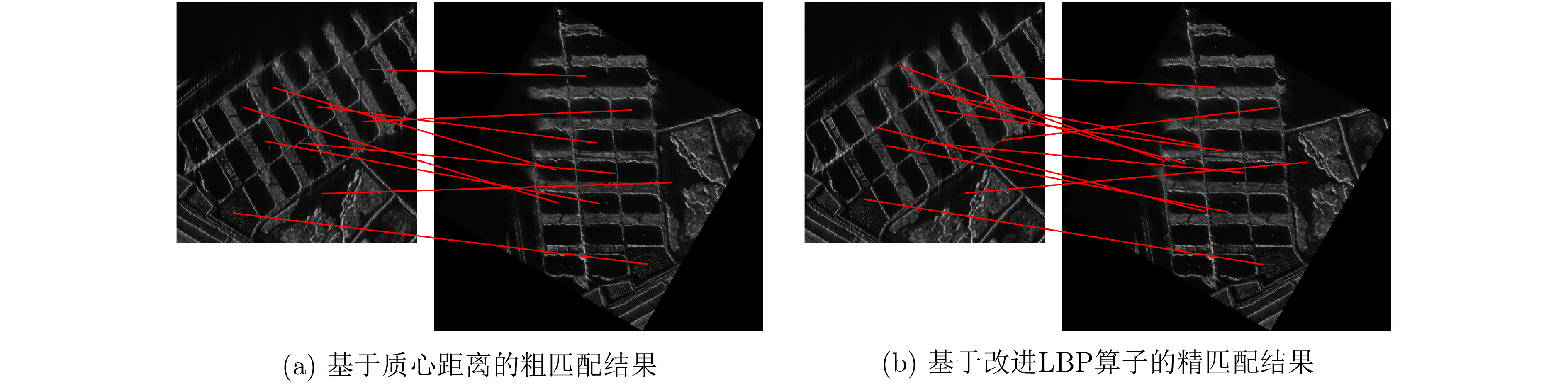
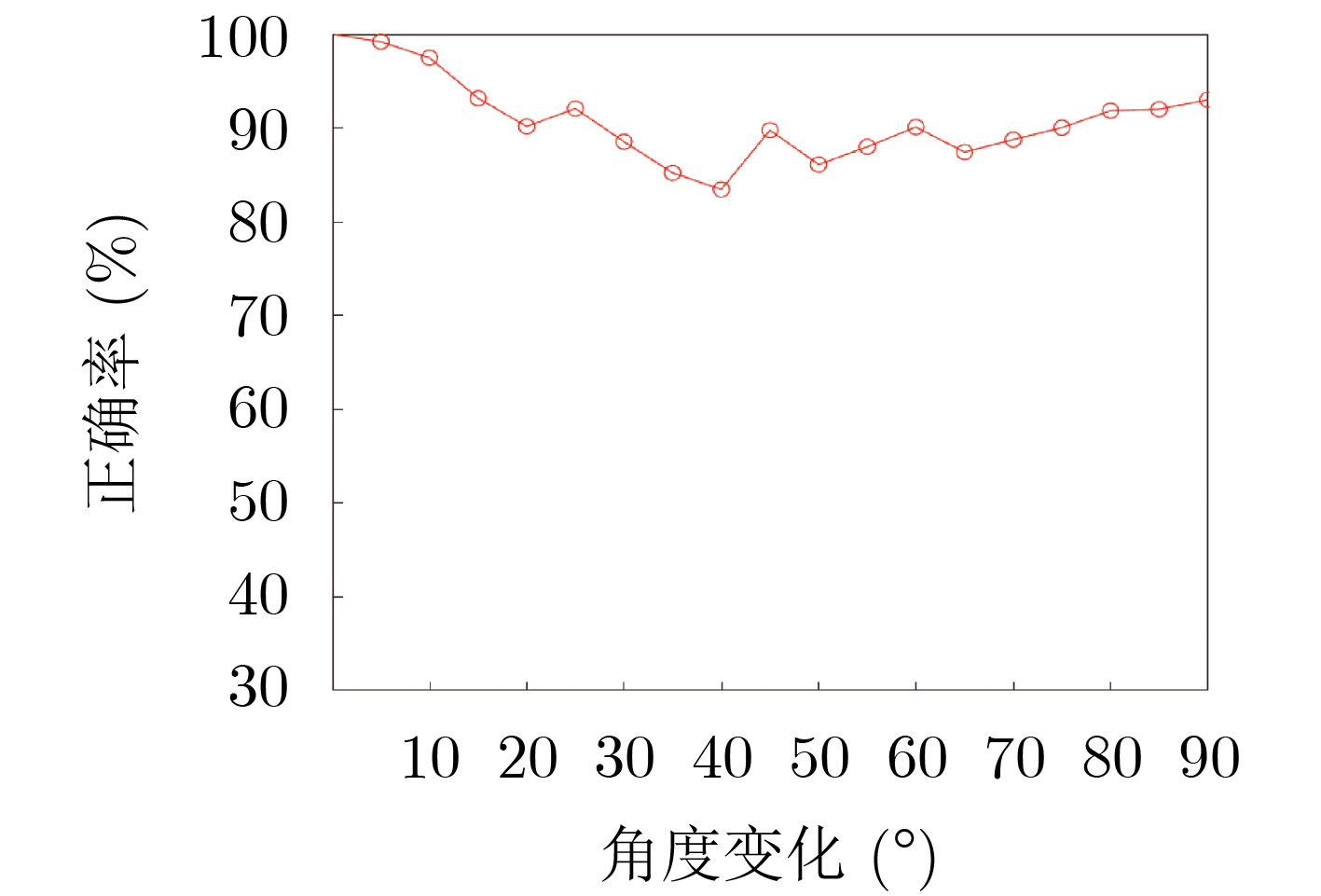
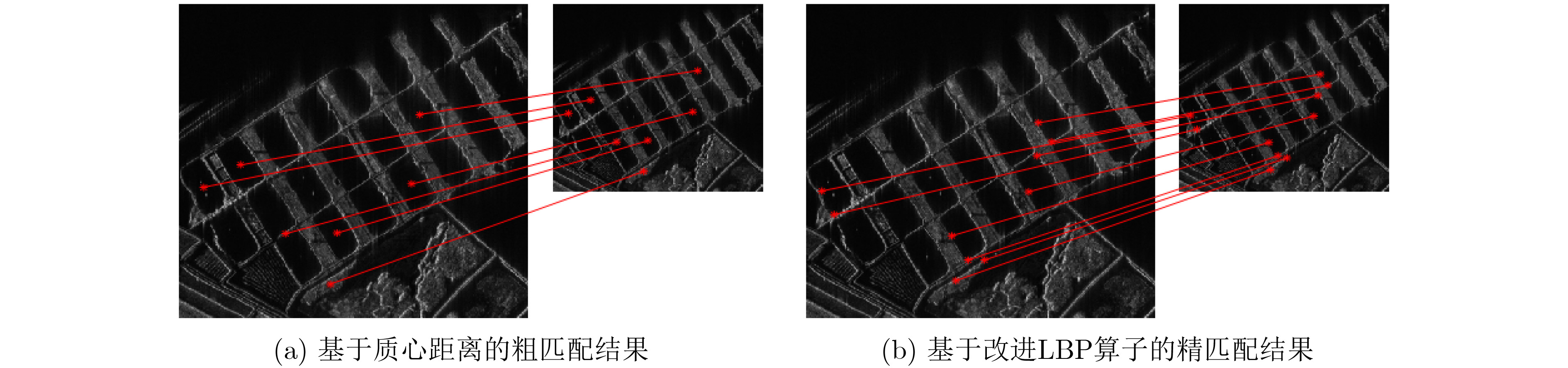
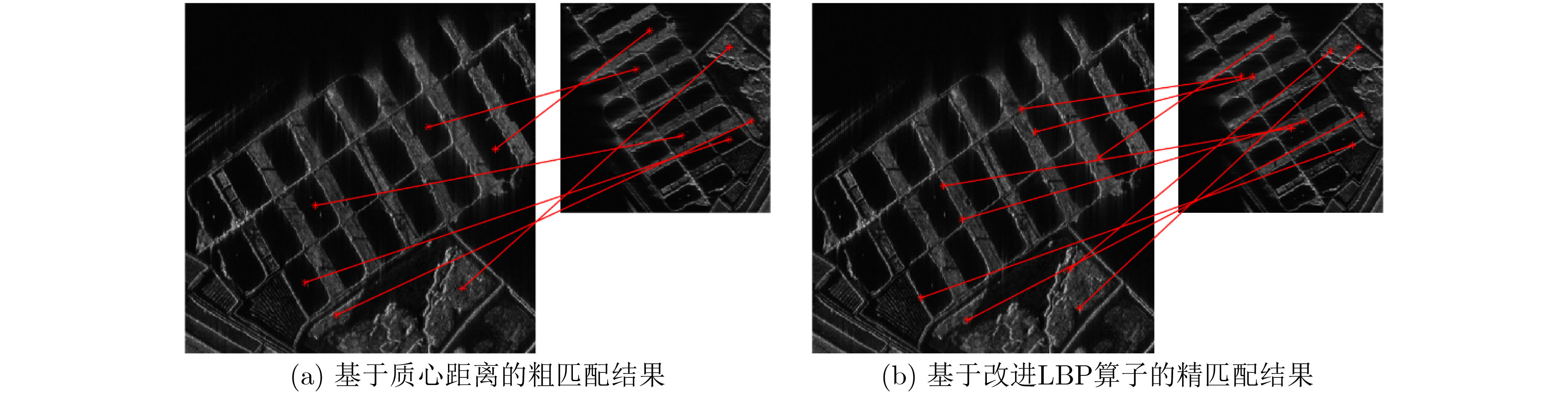
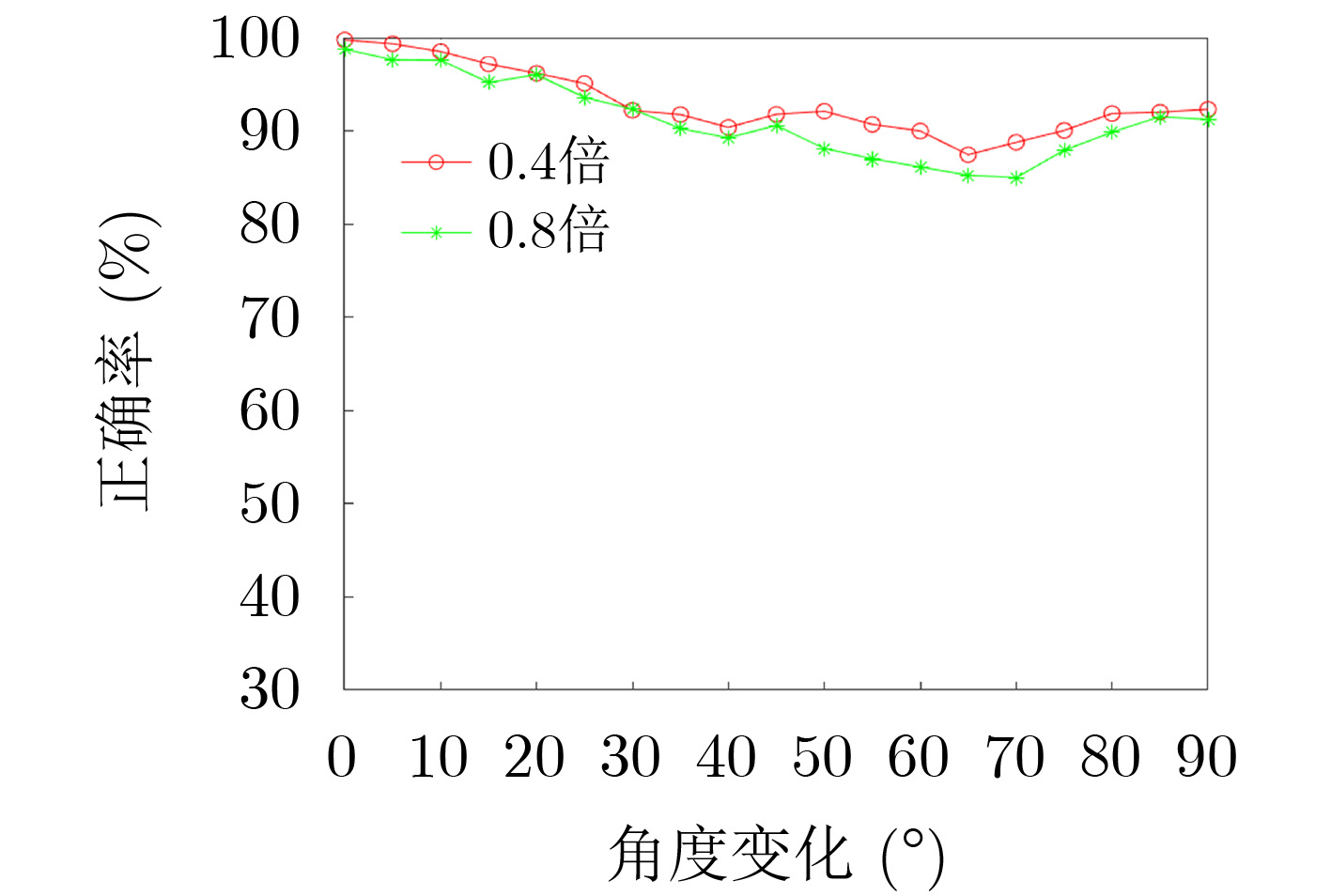
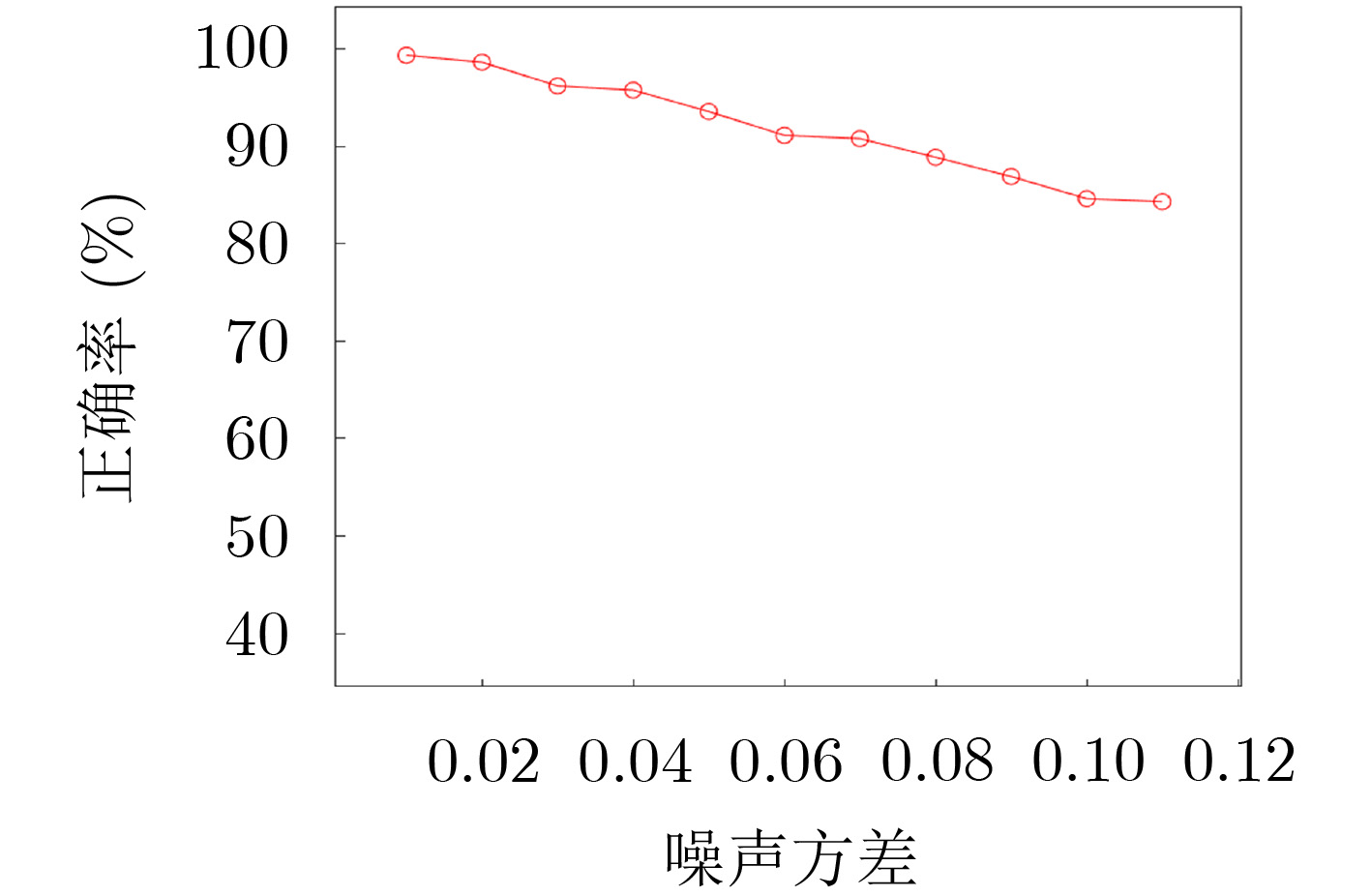
摘要: 在以星载SAR图像作为基准图、机载/弹载SAR图像作为实时图的匹配导航和精确制导研究中,传统基于点特征的匹配方法存在特征点数目过多, 误匹配率较高,容易受噪声及灰度变化影响等问题。该文提出一种基于显著轮廓特征的SAR图像“由粗到精”的匹配新方法。该方法在对SAR图像进行预处理的基础上,采用改进的模糊C均值聚类(FCM)的图像分割方法来提取闭合轮廓特征;采用归一化轮廓中心距离描述符进行双向匹配,获得强鲁棒性的粗匹配轮廓对;在粗匹配轮廓上采用改进的局部二值模式(LBP)算子得到精匹配结果。试验结果表明,该方法在图像旋转、空间变化以及噪声干扰较大的情况下,具有精确性高、鲁棒性强的优势,适宜遥感SAR图像匹配。Abstract: In the research of matching navigation and precision guidance using spaceborne SAR image as the reference image and airborne/missile SAR image as the real-time image, the traditional point feature-based matching method has too many feature points, high mismatch rate, and easy affected by problems such as noise and gray level changes. A new method for matching SAR remote sensing images from coarse to fine based on salient contour features is proposed. Based on the pre-processing of SAR images, an improved Fuzzy C-Means (FCM) clustering image segmentation is used to to extract closed contour features. Then, a normalized contour center distance descriptor is constructed for two-way matching to obtain the rough matching contours with strong robustness. Finally, the improved Local Binary Pattern (LBP) operator is employed on the rough matching contours to gain the fine matching result. The experimental results demonstrate the proposed method has the advantages of high accuracy and strong robustness in the case of image rotation, spatial variation and noise interference, and is suitable for remote sensing SAR image matching.
-
表 1 匹配方法定量比较分析
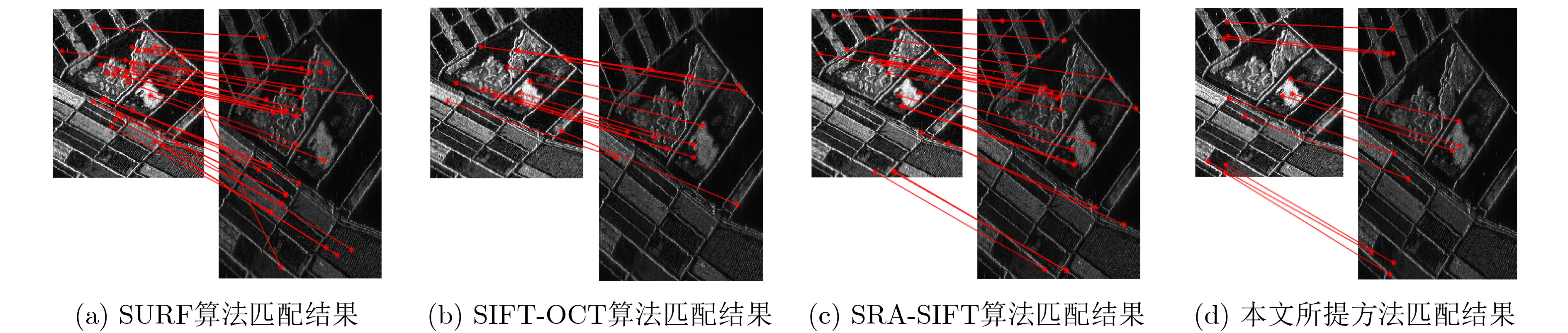
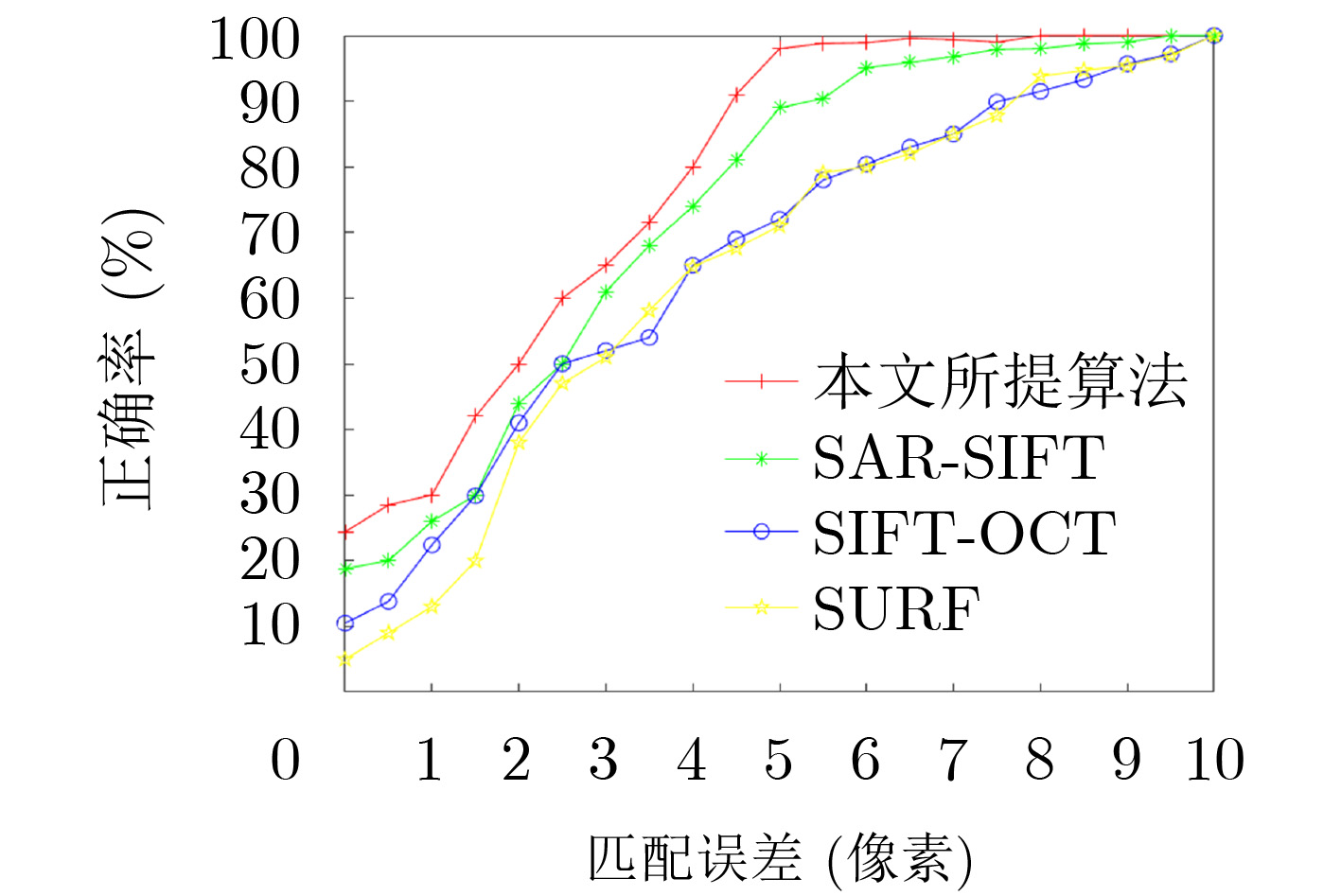
方法 RMSE 时间(ms) 匹配数 正确匹配数 正确率(%) SURF算法 6.952 218 26 21 80.77 SIFT-OCT算法 6.914 287 13 11 84.62 SAR-SIFT算法 5.071 310 19 17 89.47 本文所提方法 4.785 210 11 10 90.91  下载: 导出CSV
下载: 导出CSV
-
[1] WU Yue, LIU Junwei, ZHU Chenzhuo, et al. Computational intelligence in remote sensing image registration: A survey[J]. International Journal of Automation and Computing, 2021, 18(1): 1–17. doi: 10.1007/s11633-020-1248-x [2] JIANG Qian, LIU Yadong, YAN Yingjie, et al. A contour angle orientation for power equipment infrared and visible image registration[J]. IEEE Transactions on Power Delivery, 2021, 36(4): 2559–2569. doi: 10.1109/TPWRD.2020.3011962. [3] LI Hui, MANJUNATH B S, and MITRA S K. A contour-based approach to multisensor image registration[J]. IEEE Transactions on Image Processing, 1995, 4(3): 320–334. doi: 10.1109/83.366480 [4] ÁLVAREZ N A, SANCHIZ J M, BADENAS J, et al. Contour-based image registration using mutual information[C]. Second Iberian Conference on Pattern Recognition and Image Analysis, Estoril, Portugal, 2005: 227–234. [5] CHEN Fulong, ZHANG Hong, and WANG Chao. A Novel feature matching method in airborne SAR image registration[C]. 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, South Korea, 2005: 4722–4724. [6] ZHANG Hong, WANG Chao, TANG Yixian, et al. A new image registration method for multi-frequency airborne high-resolution SAR images[C]. 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 2003: 167–169. [7] XIE Kun, CHEN Jinlong, and YANG Minghao. A remote sensing image registration method based on multi-features[C]. 2019 IEEE 4th International Conference on Image, Vision and Computing (ICIVC), Xiamen, China, 2019: 134–138. [8] 孙兴龙, 韩广良, 郭立红, 等. 采用轮廓特征匹配的红外-可见光视频自动配准[J]. 光学精密工程, 2020, 28(5): 1140–1151.SUN Xinglong, HAN Guangliang, GUO Lihong, et al. Infrared-visible video automatic registration with contour feature matching[J]. Optics and Precision Engineering, 2020, 28(5): 1140–1151. [9] SCHWIND P, SURI S, REINARTZ P, et al. Applicability of the SIFT operator to geometric SAR image registration[J]. International Journal of Remote Sensing, 2010, 31(8): 1959–1980. doi: 10.1080/01431160902927622 [10] BAY H, TUYTELAARS T, and VAN GOOL L. SURF: Speeded up robust features[C]. Proceedings of the 9th European Conference on Computer Vision, Graz, Austria, 2006: 404–417. [11] DELLINGER F, DELON J, GOUSSEAU Y, et al. SAR-SIFT: A SIFT-like algorithm for SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(1): 453–466. doi: 10.1109/TGRS.2014.2323552 [12] MATAS J, GALAMBOS C, and KITTLER J. Robust detection of lines using the progressive probabilistic Hough transform[J]. Computer Vision and Image Understanding, 2000, 78(1): 119–137. doi: 10.1006/cviu.1999.0831 [13] 包建强, 张献州, 李圆, 等. 多种空间直线拟合方法应用分析[J]. 测绘科学, 2020, 45(5): 132–139, 151.BAO Jianqiang, ZHANG Xianzhou, LI Yuan, et al. Applied analysis of various space linear fitting methods[J]. Science of Surveying and Mapping, 2020, 45(5): 132–139, 151. [14] 吴静, 周先春, 徐新菊, 等. 三维块匹配波域调和滤波图像去噪[J]. 计算机科学, 2020, 47(7): 130–134.WU Jing, ZHOU Xianchun, XU Xinju, et al. Image denoising by mixing 3D block matching with harmonic filtering in transform domain[J]. Computer Science, 2020, 47(7): 130–134. [15] OLVERA R D P, ZERON E M, ORTEGA J C P, et al. A feature extraction using SIFT with a preprocessing by adding CLAHE algorithm to enhance image histograms[C]. 2014 International Conference on Mechatronics, Electronics and Automotive Engineering, Cuernavaca, Mexico, 2014: 20–25. [16] SHANG Ronghua, LIU Mengmeng, LIN Junkai, et al. SAR image segmentation based on constrained smoothing and hierarchical label correction[J]. IEEE Transactions on Geoscience and Remote Sensing, To be published. doi: 10.1109/TGRS.2021.3076446 [17] CANNY J. A computational approach to edge detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, PAMI-8(6): 679–698. doi: 10.1109/TPAMI.1986.4767851 [18] RAHMAN T and ISLAM M S. Image segmentation based on fuzzy C means clustering algorithm and morphological reconstruction[C]. 2021 International Conference on Information and Communication Technology for Sustainable Development (ICICT4SD), Dhaka, Bangladesh, 2021: 259–263. [19] 李彦, 赵其峰, 闫河, 等. Canny算子在PCBA目标边缘提取中的优化应用[J]. 光学精密工程, 2020, 28(9): 2096–2102. doi: 10.37188/OPE.20202809.2096LI Yan, ZHAO Qifeng, YAN He, et al. Optimized application of Canny operator in PCBA target edge extraction[J]. Optics and Precision Engineering, 2020, 28(9): 2096–2102. doi: 10.37188/OPE.20202809.2096 [20] HU Yipeng, ALEXANDER D C, and MERTZANIDOU T. Image Registration[M]. Cham: Springer, 2020: 1–8. [21] HOU Kang, LÜ Xuefei, and ZHANG Wenhui. An adaptive fusion panoramic image mosaic algorithm based on circular LBP feature and HSV color system[C]. 2020 IEEE International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 2020: 94–100. [22] 魏祥坡, 余旭初, 张鹏强, 等. 联合局部二值模式的CNN高光谱图像分类[J]. 遥感学报, 2020, 24(8): 1000–1009.WEI Xiangpo, YU Xuchu, ZHANG Pengqiang, et al. CNN with local binary patterns for hyperspectral images classification[J]. Journal of Remote Sensing, 2020, 24(8): 1000–1009. -

 下载:
下载:




图(16) / 表(1)
计量
- 文章访问数: 1611
- HTML全文浏览量: 1651
- PDF下载量: 111
- 被引次数: 0
