

Estimation Method of Measurement Errors in MEMS Inertial Measurement Unit Based Orientation Update
-
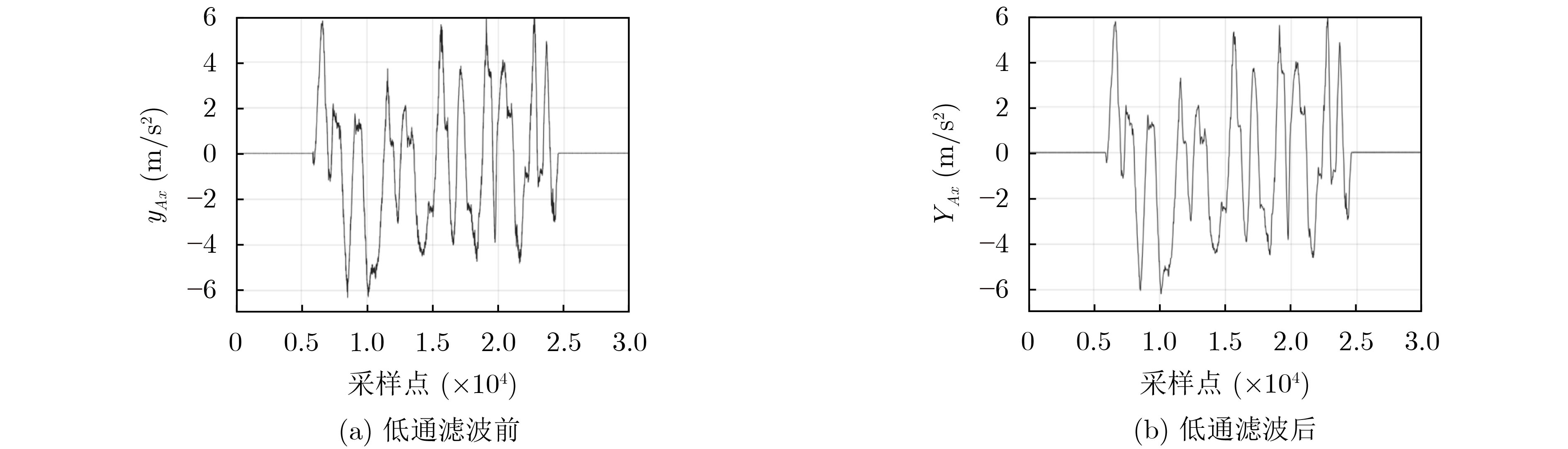
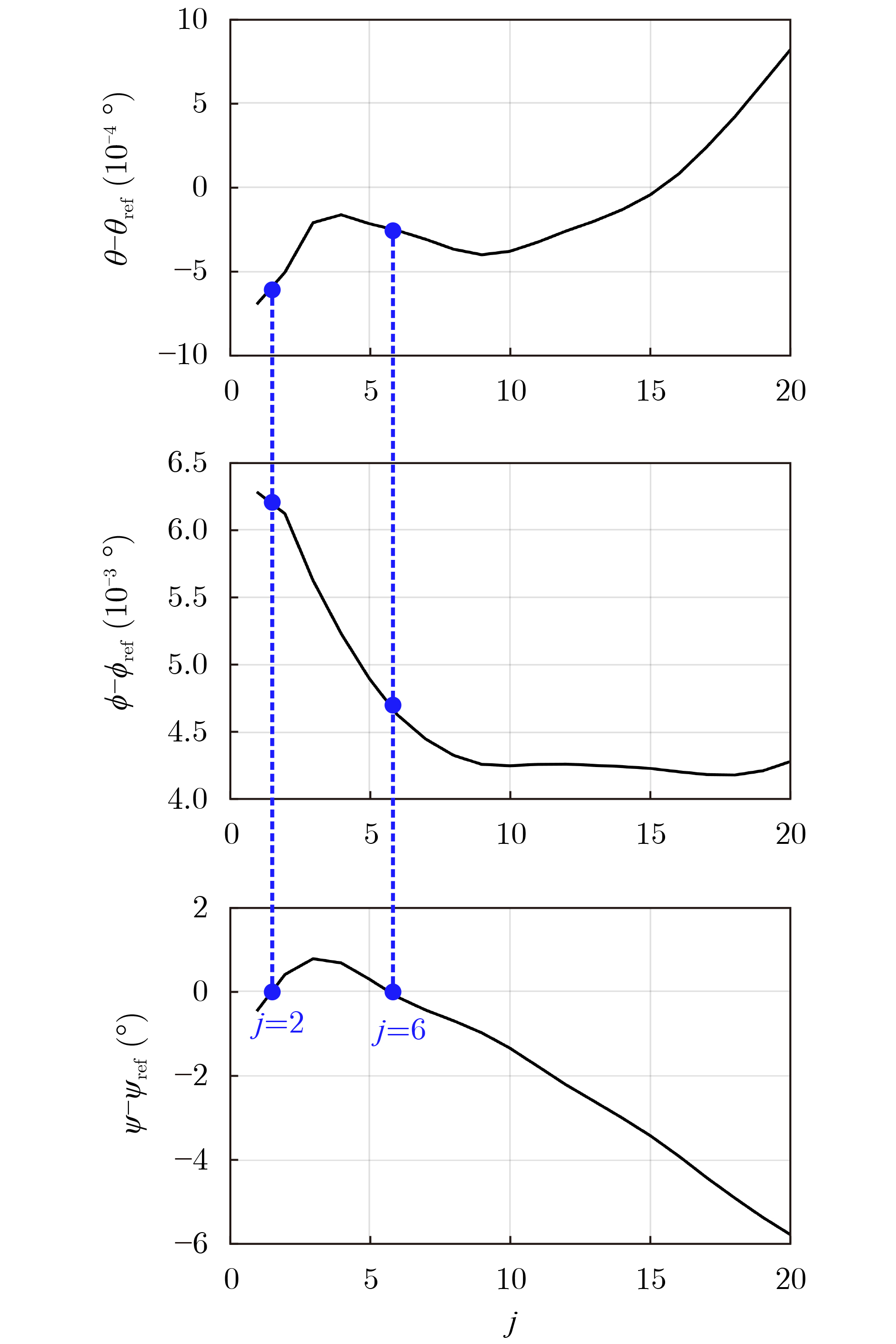
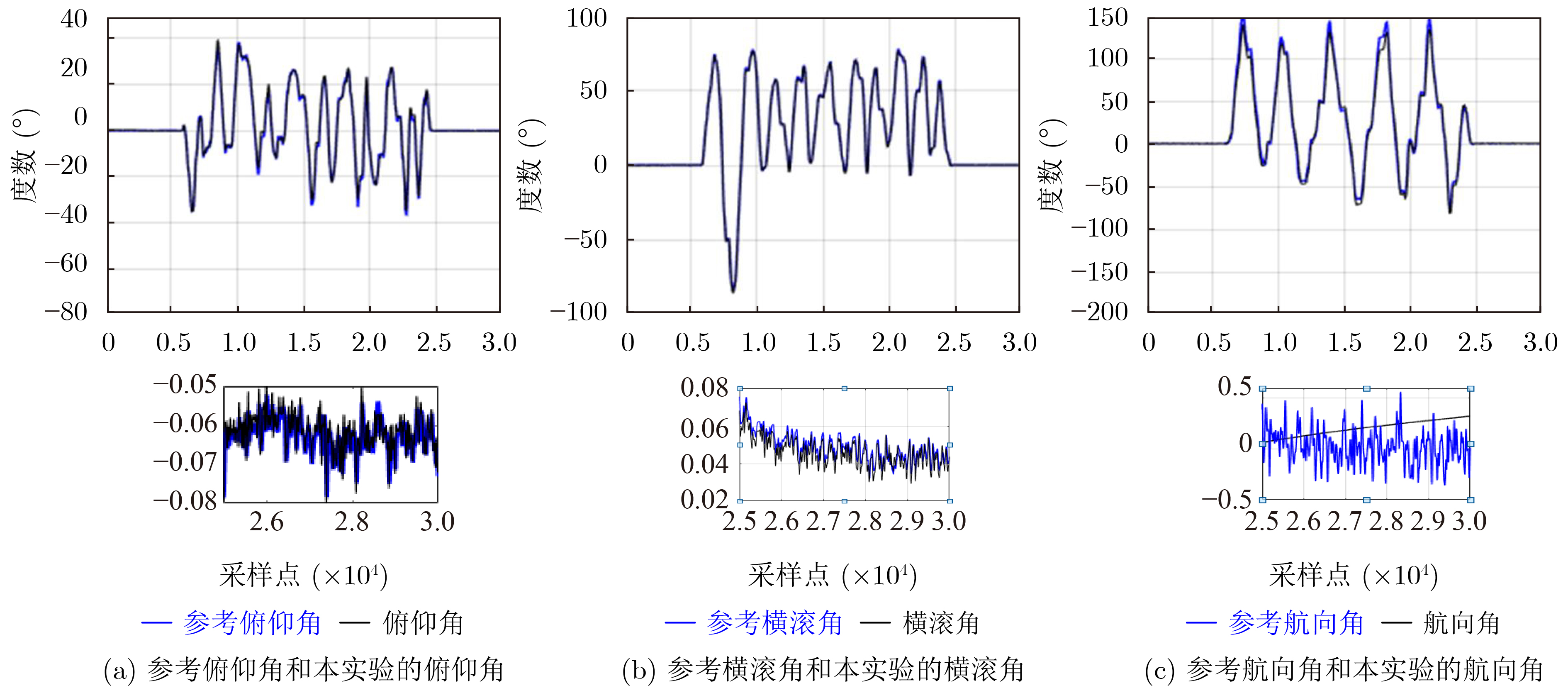
摘要: 利用MEMS惯性测量单元测量载体的航姿,需要借助精密转台且较难精确估算测量误差,导致成本高误差大。针对该问题,该文利用卡尔曼滤波器在线估算载体的姿态和陀螺仪的偏置,提出一种优化航姿精度的测量误差估算方法。通过推导测量误差的数学模型,分析航姿精度随测量误差变化的关系,得到最优航姿时的测量误差值。采用一种MEMS惯性测量单元,测试载体沿任意轨迹匀速运动5 min的航姿。实验结果表明优化后载体的航姿与参考航姿保持一致,且最后静止时段载体的俯仰角、横滚角和航向角仅偏离参考航姿0.008°, 0.006°和0.6°。
-
关键词:
- 自主定位 /
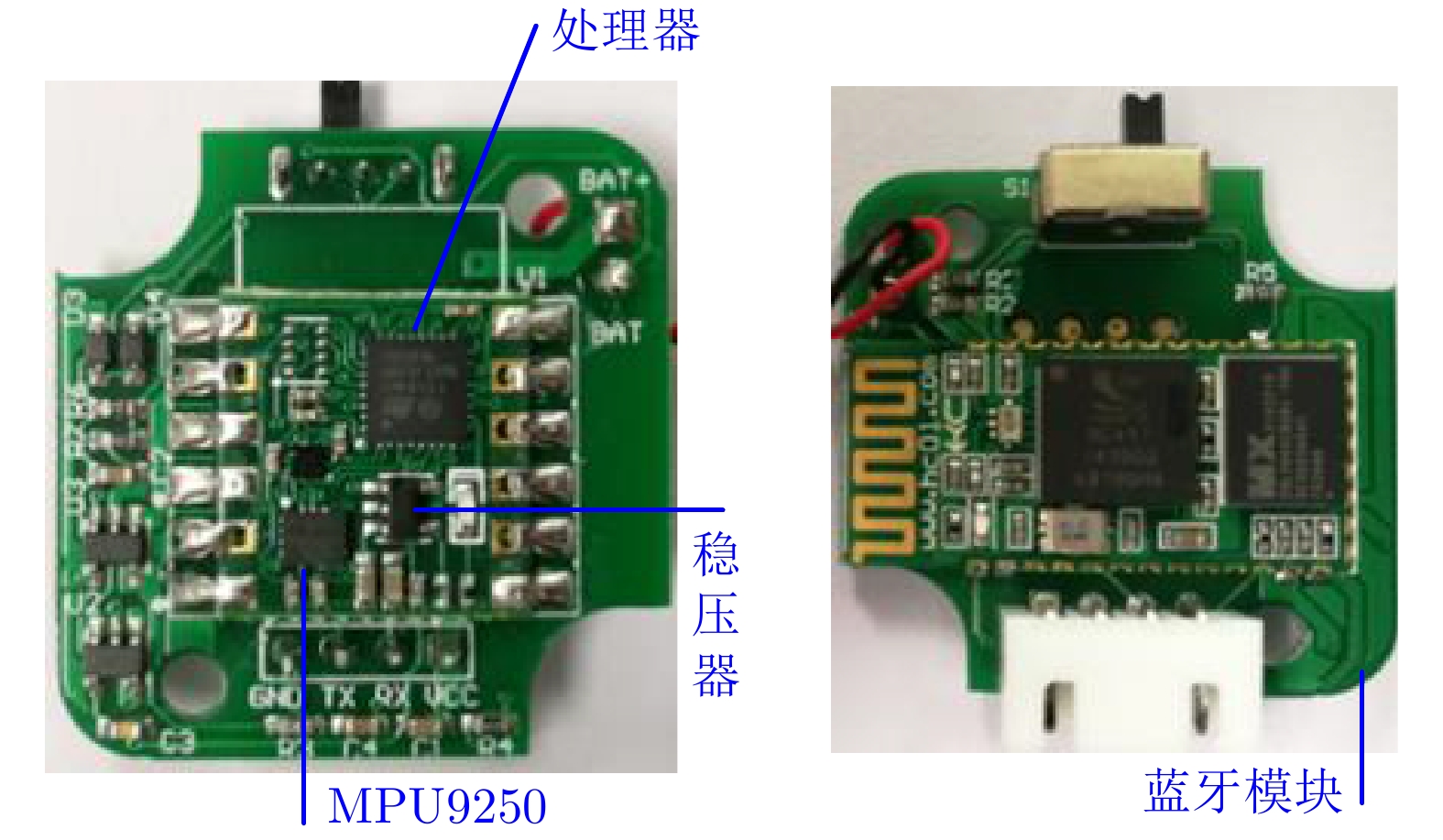
- MEMS惯性测量单元 /
- 航姿精度 /
- 测量误差
Abstract: When updating body’s orientation by using Micro Electro-Mechanical System Inertial Measurement Unit (MEMS-IMU), a precision turntable is needed and measurement errors are difficult to be estimated accurately, which cause high cost and large error. Based on the problem, both body’s attitude and gyroscope’s bias are estimated in field by a Kalman filter, an estimation method of measurement errors is proposed for improving orientation’s accuracy. Measurement errors for the optimal orientation’s accuracy are obtained by deducing the measurement errors’ mathematical model, and analyzing the relationship between orientation’s accuracy and the variations of measurement errors. By using a MEMS-IMU, the body’s orientation is measured when it keeps movement at a constant speed and in arbitrary trajectory for 5 minutes. Experimental results show the orientation after optimization is consistent with the referenced orientation, and pitch, roll and yaw during the last quiescent period deviate from the reference values only by 0.008°, 0.006° and 0.6° respectively. -
[1] 袁亚洲, 孙小芹, 李岳峰, 等. 基于先验特征的矿下人员定位校准方法[J]. 电子与信息学报, 2018, 40(6): 1323–1329. doi: 10.11999/JEIT170749YUAN Yazhou, SUN Xiaoqin, LI Yuefeng, et al. Positioning and calibration method of underground personnel based on priori features[J]. Journal of Electronics &Information Technology, 2018, 40(6): 1323–1329. doi: 10.11999/JEIT170749 [2] SARKKA O, NIEMINEN T, SUURINIEMI S, et al. A multi-position calibration method for consumer-grade accelerometers, gyroscopes, and magnetometers to field conditions[J]. IEEE Sensors Journal, 2017, 17(11): 3470–3481. doi: 10.1109/JSEN.2017.2694488 [3] QURECHI U and GOLNARAGHI F. An algorithm for the in-field calibration of a MEMS IMU[J]. IEEE Sensors Journal, 2017, 17(22): 7479–7486. doi: 10.1109/JSEN.2017.2751572 [4] ZHANG Hongliang, Wu Yuanxin, WU Wwenqi, et al. Improved multi-position calibration for inertial measurement units[J]. Measurement Science and Technology, 2010, 21: 1–11. [5] RADI A, NASSAR S, and EI-SHEIMY N. Stochastic error modeling of smartphone inertial sensors for navigation in varying dynamic conditions[J]. Gyroscopy and Navigation, 2018, 9: 76–95. doi: 10.1134/S2075108718010078 [6] RADI A, BAKALLI G, GUERRIER S, et al. A multisignal wavelet variance-based framework for inertial sensor stochastic error modeling[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 68(12): 4924–4936. doi: 10.1109/TIM.2019.2899535 [7] NARASSIMHAPPA M, MAHINDRAKAR A D, GUIZILINI V C, et al. MEMS-based IMU drift minimization: sega husa adaptive robust kalman filtering[J]. IEEE Sensors Journal, 2020, 20(1): 250–260. doi: 10.1109/JSEN.2019.2941273 [8] JIANG Pan, WANG Guochen, ZHANG Ya, et al. An improved attitude compensation algorithm in high dynamic environment[J]. IEEE Sensors Journal, 2020, 20(1): 306–317. doi: 10.1109/JSEN.2019.2939849 [9] AHME H and TAHIR M. Accurate attitude estimation of a moving land vehicle using low-cost MEMS IMU sensor[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(7): 1723–1739. doi: 10.1109/TITS.2016.2627536 [10] MAKNI A, FOURATI H, and KIBANGOU A Y. Energy-aware adaptive attitude estimation under external acceleration for pedestrian navigation[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(3): 1366–1375. doi: 10.1109/TMECH.2015.2509783 [11] 马明, 宋千, 李杨寰, 等. 基于地磁辅助的室内行人定位航向校正方法[J]. 电子与信息学报, 2017, 39(3): 647–653. doi: 10.11999/JEIT160407MA Ming, SONG Qian, LI Yanghuan, et al. Magnetic-aided heading error calibration approach for indoor pedestrian positioning[J]. Journal of Electronics &Information Technology, 2017, 39(3): 647–653. doi: 10.11999/JEIT160407 [12] SABATELLI S, GALGANI M, FANUCCI L, et al. A double- stage Kalman filter for orientation tracking with an integrated processor in 9-D IMU[J]. IEEE Transactions on Instrumentation and Measurement, 2013, 62(3): 590–598. doi: 10.1109/TIM.2012.2218692 [13] HUANG Chengliang, LIAO Zaiyi, and ZHAO Lian. Synergism of INS and PDR in self-contained pedestrian tracking with a miniature sensor module[J]. IEEE Sensors Journal, 2010, 10(8): 1349–1359. doi: 10.1109/JSEN.2010.2044238 [14] HYYTI H and VISALA A. A DCM based attitude estimation algorithm for low-cost MEMS IMUs[J]. International Journal of Navigation and Observation, 2015, 2015: 1–12. [15] GHANIPOOR F, HASHEMI M, and SALARIEH H. Toward calibration of low-precision MEMS IMU using a nonlinear model and TUKF[J]. IEEE Sensors Journal, 2020, 20(8): 4131–4138. doi: 10.1109/JSEN.2019.2963538 [16] LUINGE H J and VELTINK P H. Measuring orientation of human body segments using miniature gyroscopes and accelerometers[J]. Medical& Biological Engineering& Computing, 2005, 43: 273–282. [17] 孙小君, 周晗, 闫广明. 基于新息的自适增量Kalman滤波器[J]. 电子与信息学报, 2020, 42(9): 2223–2230. doi: 10.11999/JEIT190493SUN XiaoJun, ZHOU Han, and YAN Guangming. Adaptive incremental Kalman filter based on innovation[J]. Journal of Electronics &Information Technology, 2020, 42(9): 2223–2230. doi: 10.11999/JEIT190493 [18] TITTERTON D H and WESTON J L. Strapdown Inertial Navigation Technology[M]. 2n ed. , Resto, VA: Amer. Inst. Aeronaut. Astronaut, 2004. [19] LIU X Y, ZHOU Z Y, and XIONG W. Design and test of MEMS attitude measurement unit for fall detection[J]. Key Engineering Materials, 2011, 483(2011): 465–470. -

 下载:
下载:


图(4)
计量
- 文章访问数: 1412
- HTML全文浏览量: 856
- PDF下载量: 121
- 被引次数: 0
