

Spatiotemporal Performance of Spaceborne Global NavigationSatellites System Reflectometry
-
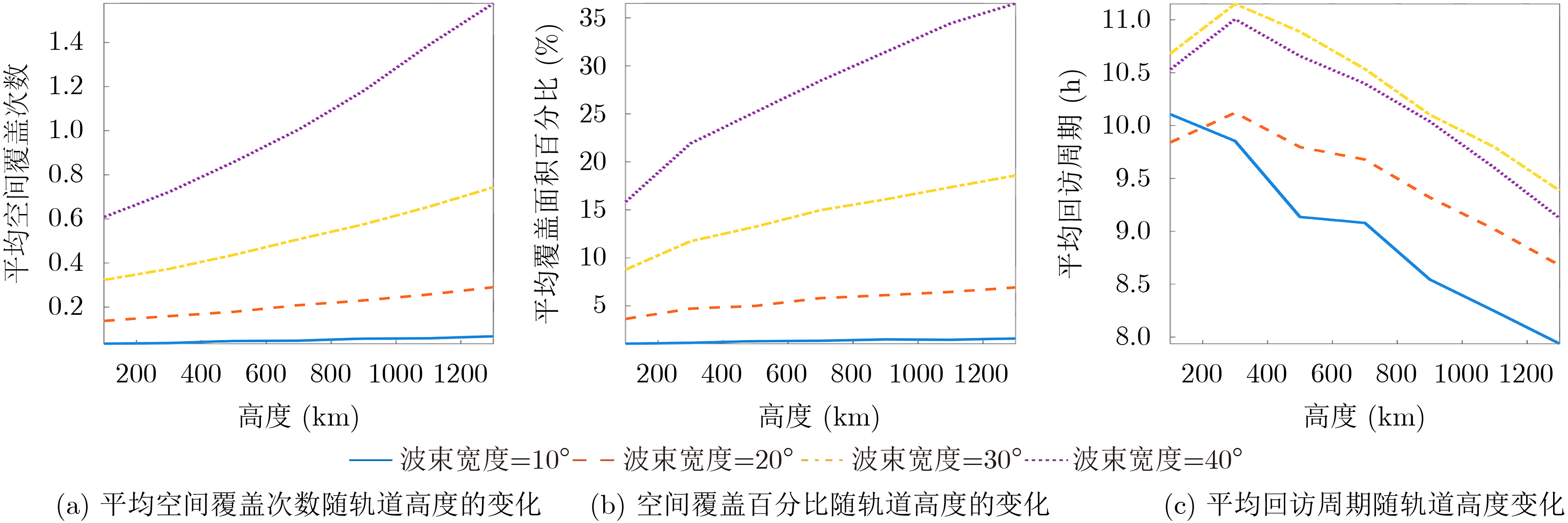
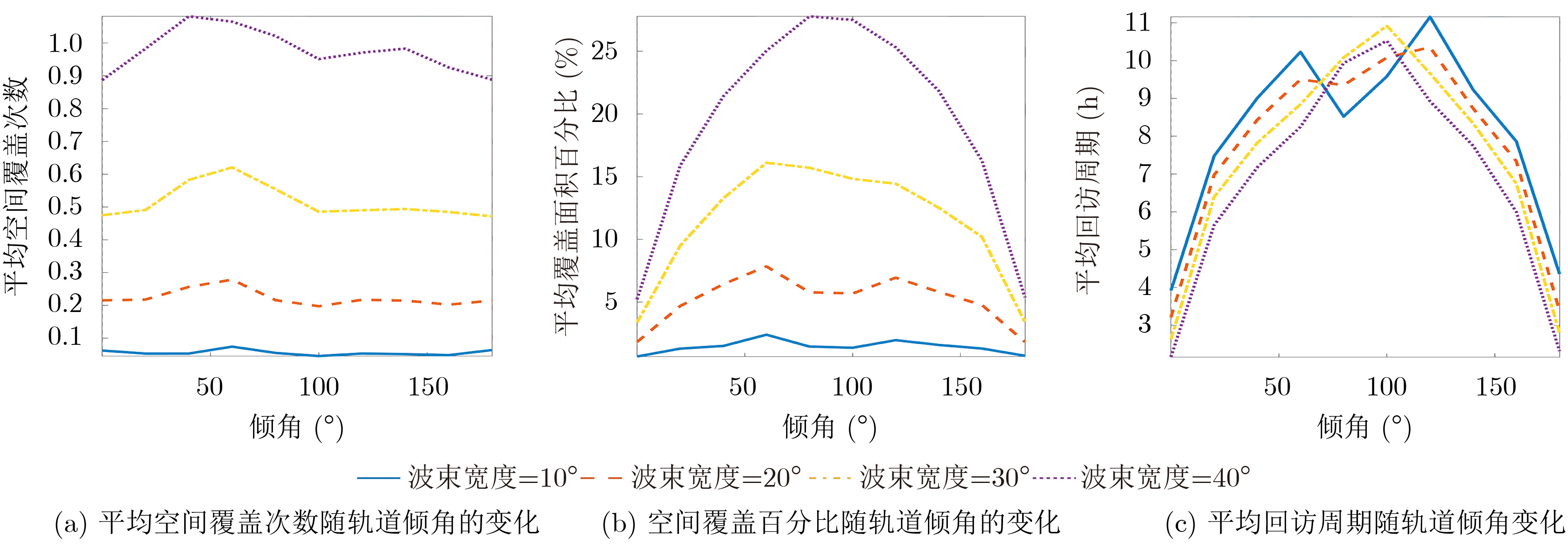
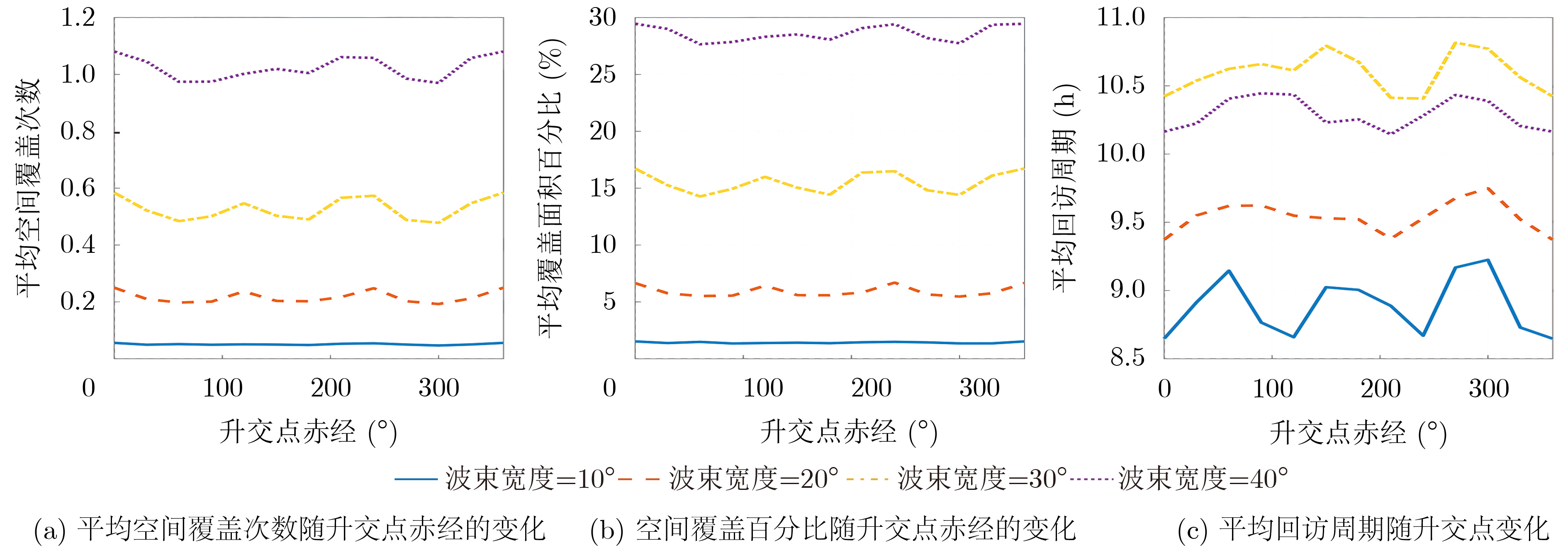
摘要: 针对星载全球导航卫星系统(GNSS)反射信号时-空性能问题,该文从1阶统计量角度定义了平均空间覆盖次数、全球覆盖面积百分比和平均回访时间3个衡量星载GNSS反射信号时-空性能的指标,并通过建立GNSS和低轨卫星轨道仿真研究了低轨卫星轨道高度、倾角、升交点赤经以及天线波束对星载GNSS反射信号时-空性能的影响。结果表明:单颗卫星无法满足全球探测的任务需求,当轨道高度为1300 km,倾角为98.7°,天线波束为40°时,平均覆盖次数、平均覆盖面积百分比和平均回访时间分别为1.6, 36.5%和8 h;通过单一轨道的卫星组网可有效提高星载GNSS反射信号的时-空性能,当卫星数目为4,高度为635 km,倾角为98.7°,波束宽度为40°时,星载GNSS反射信号的时-空性能指标高于单颗ASCAT卫星24 h覆盖地球65%的指标;当卫星数目增加至8颗时,星载GNSS反射信号可在平均4.5 h内观测地球88.9%的区域。
-
关键词:
- 星载GNSS反射信号 /
- 平均空间覆盖次数 /
- 平均覆盖面积百分比 /
- 回访时间 /
- 卫星组网
Abstract: The mean of spatial coverage number, the percentage of global coverage, and the mean of revisiting time are defined based on first-order statistics to evaluate spatiotemporal performance of spaceborne Global Navigation Satellites System (GNSS) reflectometry, in addition develops the GNSS and LEO orbits to simulate the influence of LEO orbit height, inclination and right ascension of ascending node on spatiotemporal performance. The results show that the mean of spatial coverage number, the percentage of global coverage, and the mean of revisiting time are respectively 1.6, 36.5, and 8 h with the orbit height of 1300 km, inclination of 98.7°, and the beam width of 40° so that the requirement of global observation could not be met. When the number of satellites in same orbital plane is 4 and the orbit height, inclination, and the beam width are respectively 1300 km, 98.7°, 40°, the spatiotemporal performance is higher than the 65% of single ASCAT. For the case of 8 satellites, spaceborne GNSS reflectometry could observe the area of 88.9% of the earth in 4.5 h. -
表 1 4个GNSS系统在轨数目及低轨卫星最小可见的平均卫星数
GNSS 轨道高度(km) 轨道倾角(°) 卫星总数 最小可见卫星数(hr=2000 km) GPS 20200 55 32 10 GLONASS 19100 64.8 24 8 Galileo 23222 56 30 10 BeiDou(MEO) 21528 55 27 9  下载: 导出CSV
下载: 导出CSV
表 2 低轨卫星轨道参数和下视天线波束宽度
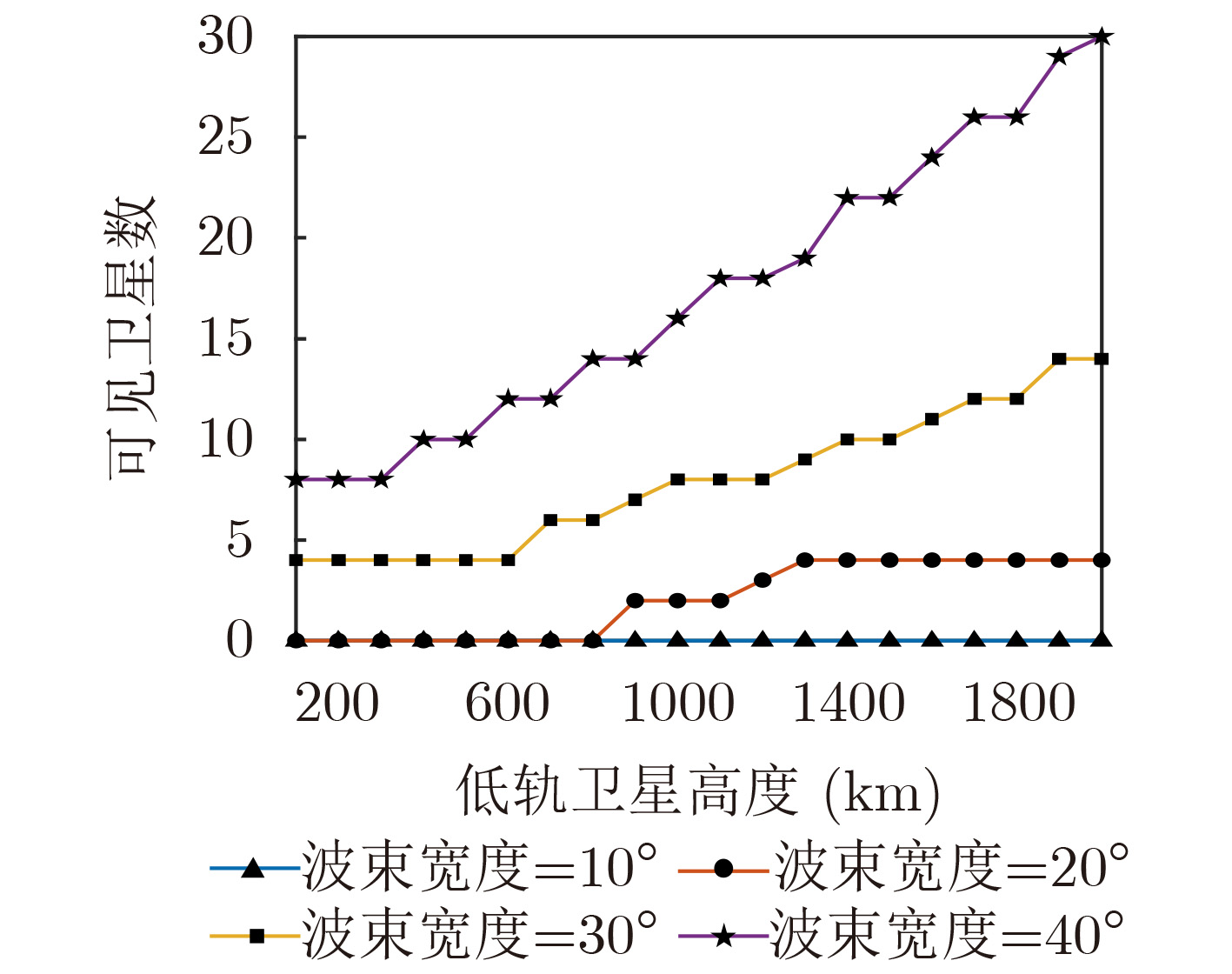
研究对象 轨道高度(km) 轨道倾角(°) 升交点赤经(°) 波束宽度(°) 高度 100~2000 98.7 75.22 10/20/30/40 倾角 635 0~180 75.22 10/20/30/40 升交点赤经 635 98.7 0~360 10/20/30/40
下载: 导出CSV
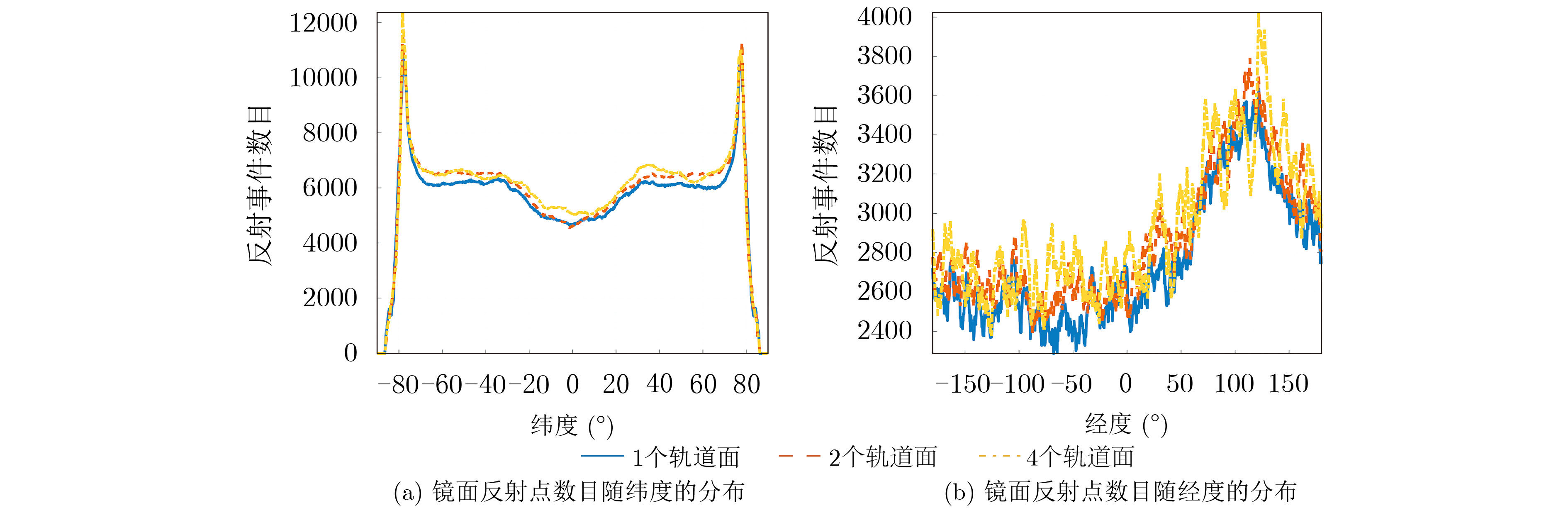
表 3 4颗卫星组成不同星座的星载GNSS反射信号时-空性能
轨道面数目 平均覆盖次数 全球覆盖百分比(%) 平均回访周期(h) 1 3.84 69.45 6.81 2 3.98 67.93 6.68 4 4.06 68.72 6.61
下载: 导出CSV
-
[1] MATíN-NEIRA M. A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry[J]. ESA Journal, 1993, 17(4): 331–355. [2] LI Weiqiang, CARDELLACH E, FABRA F, et al. Assessment of spaceborne GNSS-R ocean altimetry performance using CYGNSS mission raw data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(1): 238–250. doi: 10.1109/TGRS.2019.2936108 [3] RODRIGUEZ-ALVAREZ N, AKOS D M, ZAVOROTNY V U, et al. Airborne GNSS-R wind retrievals using Delay-Doppler maps[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(1): 626–641. doi: 10.1109/TGRS.2012.2196437 [4] YAN Qingyun and HUANG Weimin. Sea ice remote sensing using GNSS-R: A review[J]. Remote Sensing, 2019, 11(21): 2565. doi: 10.3390/rs11212565 [5] WU Xuerui, DONG Zhounan, JIN Shuanggen, et al. First measurement of soil freeze/thaw cycles in the Tibetan Plateau using CYGNSS GNSS-R data[J]. Remote Sensing, 2020, 12(15): 2361. doi: 10.3390/rs12152361 [6] FOTI G, GOMMENGINGER C, JALES P, et al. Spaceborne GNSS reflectometry for ocean winds: First results from the UK TechDemoSat-1 mission[J]. Geophysical Research Letters, 2015, 42(13): 5435–5441. doi: 10.1002/2015GL064204 [7] RUF C S, ATLAS R, CHANG P S, et al. New ocean winds satellite mission to probe hurricanes and tropical convection[J]. Bulletin of the American Meteorological Society, 2016, 97(3): 385–395. doi: 10.1175/BAMS-D-14-00218.1 [8] JING Cheng, NIU Xinliang, DUAN Chongdi, et al. Sea surface wind speed retrieval from the first Chinese GNSS-R mission: Technique and preliminary results[J]. Remote Sensing, 2019, 11(24): 3013. doi: 10.3390/rs11243013 [9] 杨东凯, 王峰, 李伟强, 等. 基于低轨卫星的北斗反射事件仿真分析[J]. 电波科学学报, 2015, 30(3): 409–416.YANG Dongkai, WANG Feng, LI Weiqiang, et al. Simulation analysis of Beidou reflection events based on LEO satellites[J]. Chinese Journal of Radio Science, 2015, 30(3): 409–416. [10] 柳聪亮, 白伟华, 夏俊明, 等. 低轨卫星星载GNSS反射事件模拟分析[J]. 武汉大学学报: 信息科学版, 2018, 43(6): 826–831, 839.LIU Congliang, BAI Weihua, XIA Junming, et al. Simulation study of spaceborne GNSS-R event[J]. Geomatics and Information Science of Wuhan University, 2018, 43(6): 826–831, 839. [11] GAO Fan, XU Tianhe, WANG Nazi, et al. Spatiotemporal evaluation of GNSS-R based on future fully operational global multi-GNSS and eight-LEO constellations[J]. Remote Sensing, 2018, 10(1): 67. [12] 沈欣. 光学遥感卫星轨道设计若干关键技术研究[D]. [博士学位], 武汉大学, 2012.SHEN Xin. Research on key technologies of orbit design for optical remote sensing satellite[D]. [Ph.D. dissertation], Wuhan University, 2012. [13] MARTIN-NEIRA M, D’ADDIO S, BUCK C, et al. The PARIS ocean altimeter in-orbit demonstrator[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(6): 2209–2237. doi: 10.1109/TGRS.2010.2092431 [14] 谢钢. 全球导航卫星系统原理: GPS、格洛纳斯和伽利略系统[M]. 北京: 电子工业出版社, 2013: 15-43.XIE Gang. Principles of GNSS: GPS, GLONASS, and Galileo[M]. Beijing: Publishing House of Electronics Industry, 2013: 15-43. [15] European Union. European GNSS (Galileo) open service: Signal in space interface control document[R]. 2010. [16] Russian Institute of Space Device Engineering. Global Navigation Satellite System (GLONASS) interface control document navigational radio signal in band L1, L2[S]. 2008. [17] 中国卫星导航系统管理办公室. 北斗卫星导航系统空间信号接口控制文件——公开服务信号B1I(3.0版)[R]. BDS-SIS-ICD-B1I-3.0, 2019.China Satellite Navigation Office, BeiDou Navigation Satellite System Signal In Space Interface Control Document- Open Service Signal B3I (Version 1.0) [R]. BDS-SIS-ICDB1I-3.0, 2019. [18] 张波, 王峰, 杨东凯. 基于线段二分法的GNSS-R镜面反射点估计算法[J]. 全球定位系统, 2013, 38(5): 11–16, 26. doi: 10.3969/j.issn.1008-9268.2013.05.003ZHANG Bo, WANG Feng, and YANG Dongkai. The algorithm for the determination of the GNSS-R specular point based on the dichotomy of the line segment[J]. GNSS World of China, 2013, 38(5): 11–16, 26. doi: 10.3969/j.issn.1008-9268.2013.05.003 [19] 陈宏宇, 吴会英, 周美江, 等. 微小卫星轨道工程应用与STK仿真[M]. 北京: 科学出版社, 2016: 274–276.CHEN Hongyu, WU Huiying, ZHOU Meijiang, et al. RBIT Engineering Appllication and STK Simulation for Microsatellite[M].Beijing: Science Press, 2016: 274–276. [20] LINDSLEY R D, BLODGETT J R, and LONG D G. Analysis and validation of high-resolution wind from ASCAT[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(10): 5699–5711. doi: 10.1109/TGRS.2016.2570245 -

 下载:
下载:


图(7) / 表(3)
计量
- 文章访问数: 1010
- HTML全文浏览量: 714
- PDF下载量: 79
- 被引次数: 0
