

Iterative Learning Identification for a Class of Wiener Nonlinear Time- Varying Systems
-
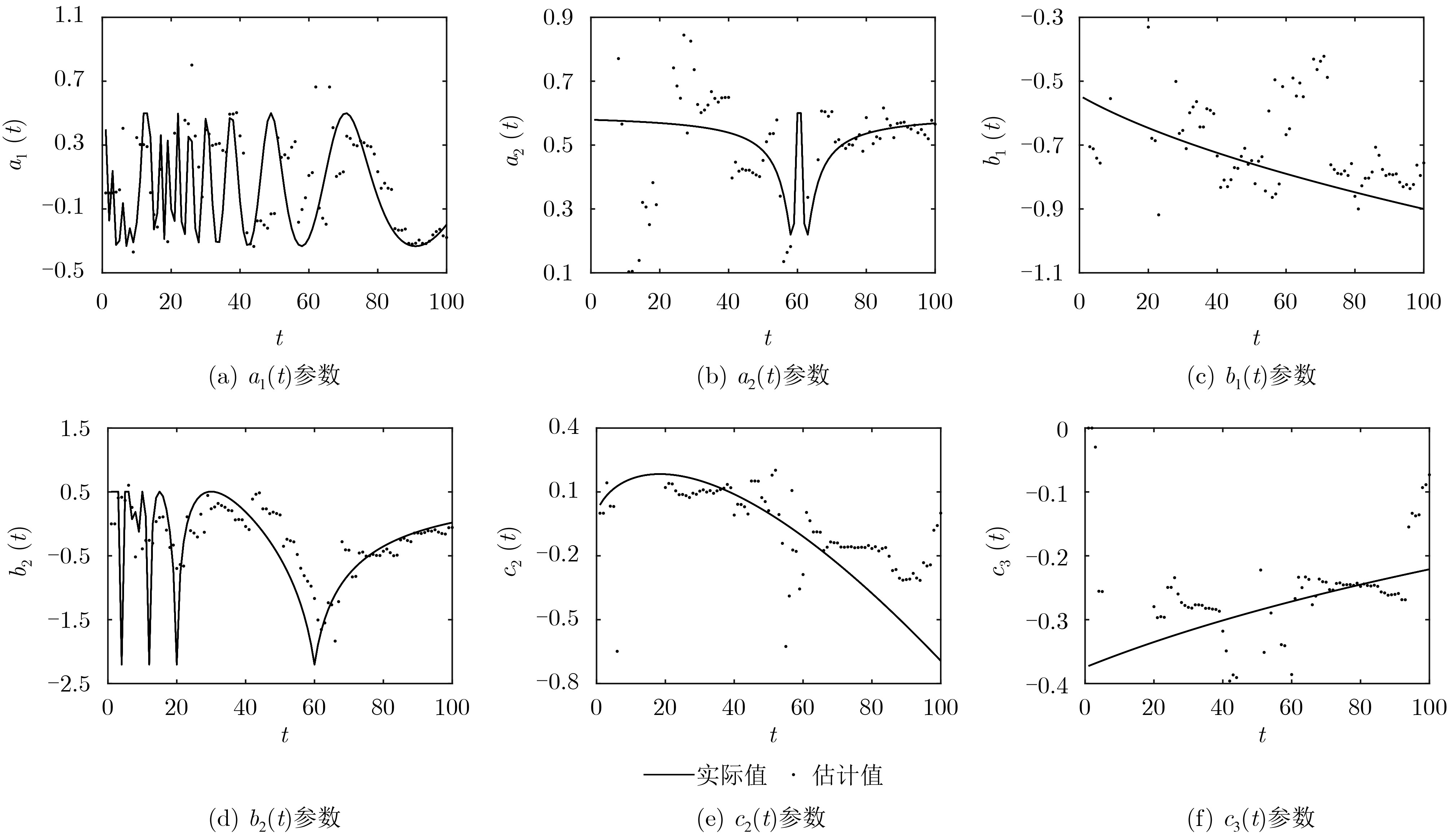
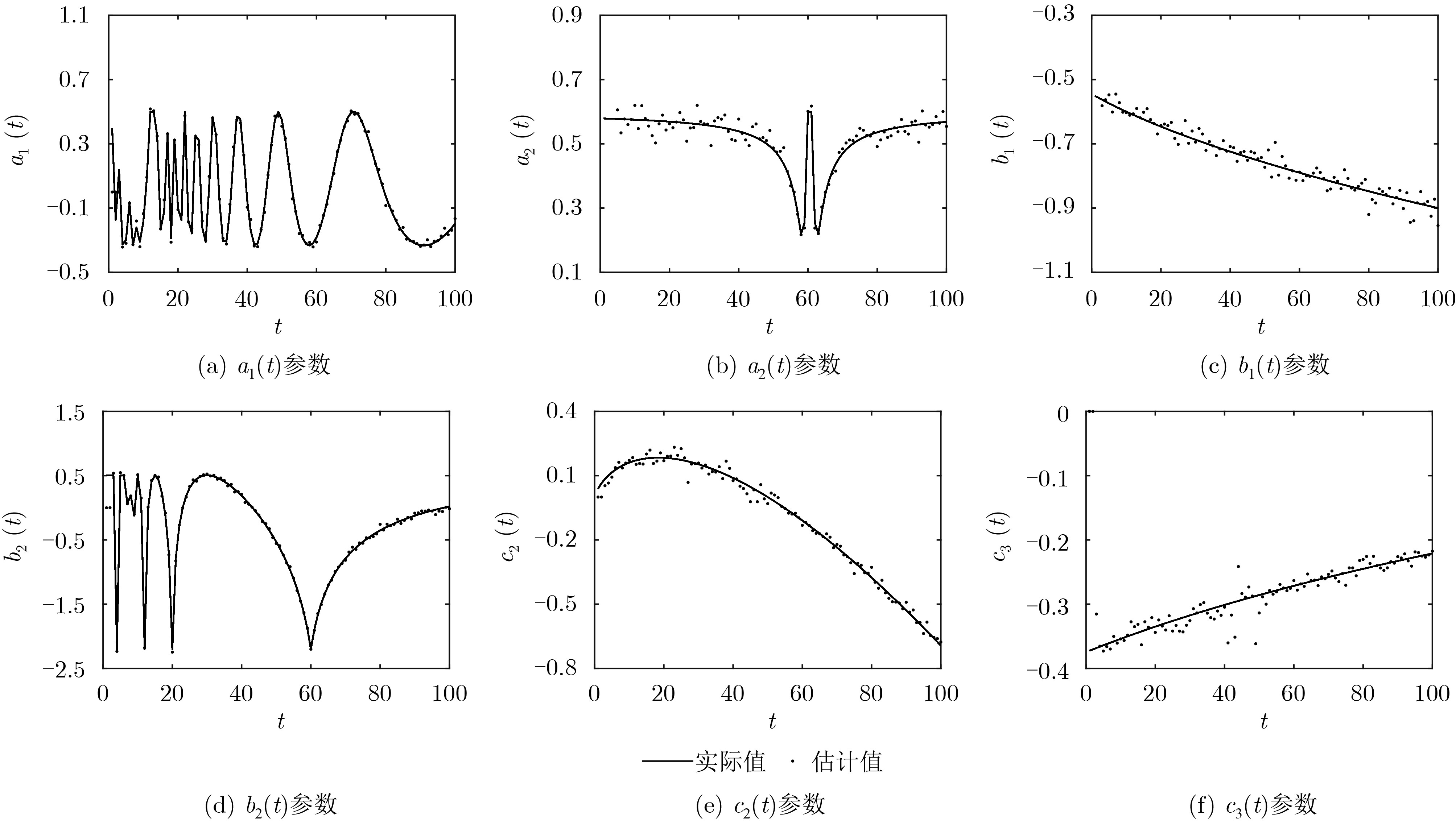
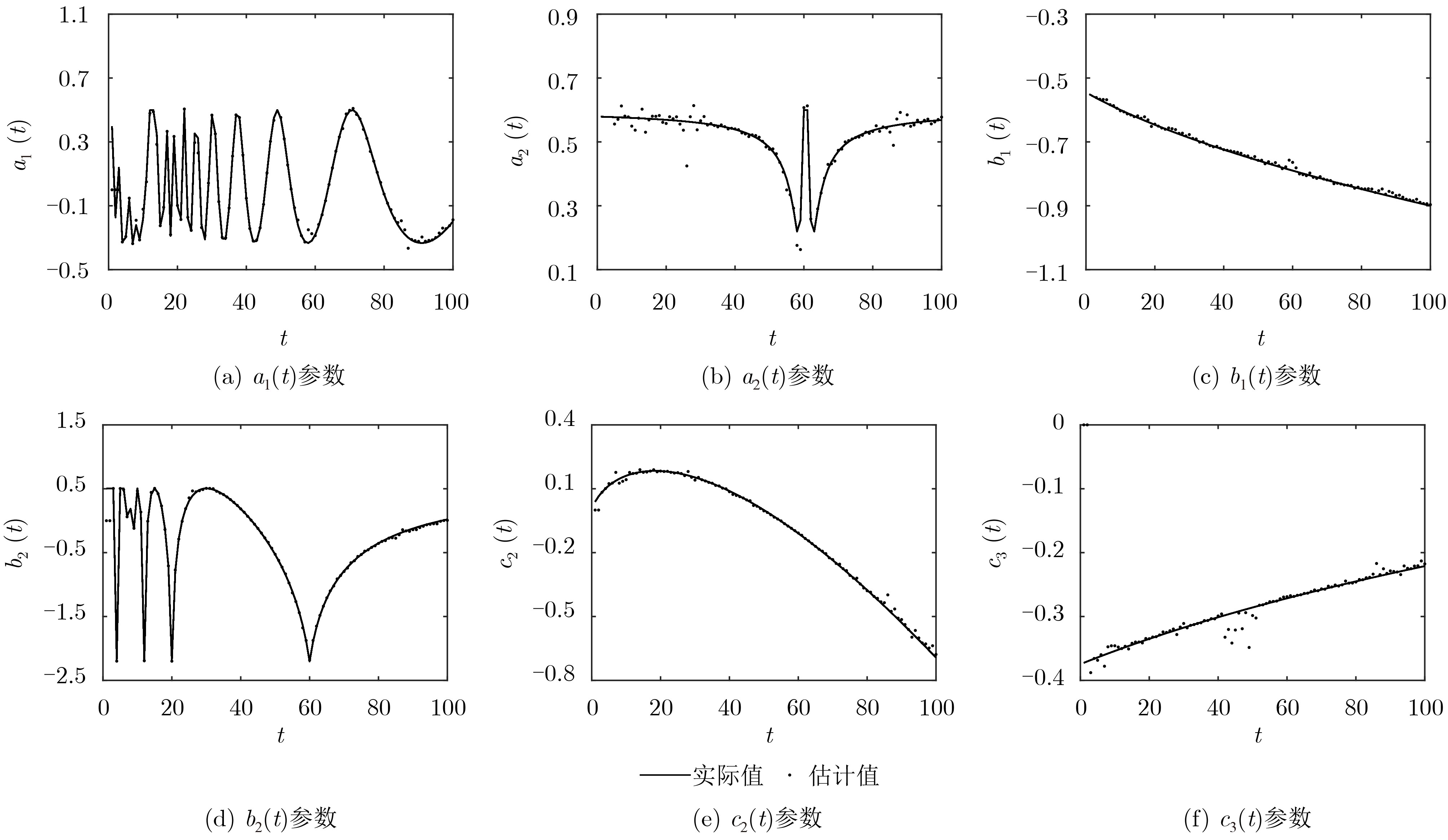
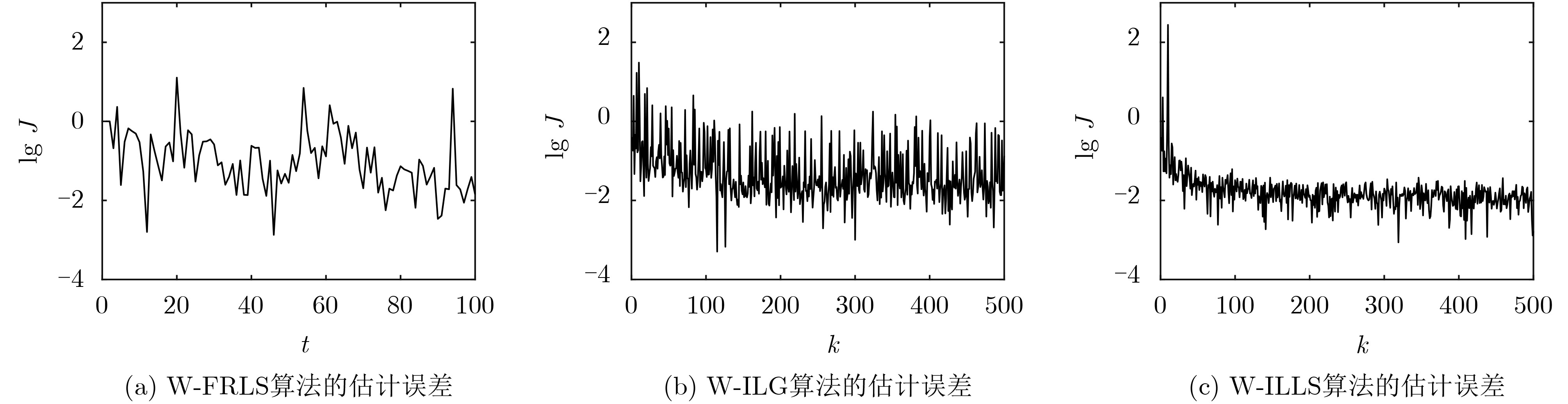
摘要: 针对Wiener非线性时变系统的参数辨识问题,该文提出一种基于重复轴的迭代学习算法来实现对时变甚至突变参数的估计。文中将维纳系统输出非线性部分的反函数进行多项式展开,进而构造了回归模型,未知参数及中间变量用其估计替代,分别给出了采用迭代学习梯度算法和迭代学习最小二乘算法实现时变参数辨识的方法。仿真结果表明,与带遗忘因子的递推算法和迭代学习梯度算法相比,迭代学习最小二乘算法更具有参数估计收敛速度快,辨识精度高,系统输出误差小等优势,验证了所提学习算法的有效性。Abstract: For the parameters identification of Wiener nonlinear time-varying systems, iterative learning algorithms based on repeated axes are proposed to estimate the time-varying or even abrupt parameters. At first, the output nonlinear part of the Wiener system undertaken is tackled based on polynomial expansion, and then the regression model is constructed, the unknown parameters and intermediate variables are replaced by their estimates. Both iterative learning gradient and iterative learning least square algorithms are used to conduct the identification of the time-varying systems. Compared with the recursive algorithm with forgetting factor and iterative learning gradient algorithm, the simulation results demonstrate that the iterative learning least squares algorithm can perform high identification accuracy and efficiency, being of fast convergence speed and less resultant system output error, which verifies the effectiveness of the proposed algorithm.
-
Key words:
- Time-varying parameters /
- Wiener systems /
- Gradient algorithms /
- Least squares /
- Iterative learning
-
表 1 采用迭代学习梯度算法(W-ILG)计算
${\hat {\boldsymbol{\theta}} _k}(t)$ 的流程图输入:重复激励的一组数列 输出:堆积的输出向量${{\boldsymbol{Y}}_k}(t)$ 1. 对于所有的$t = 0,1, ··· ,N$,给定参数估计初始值${\hat \theta _{ - 1}}(t) = 0$,迭代所需${x_0}(t)$和${v_0}(t)$的值,并置$k = 0$; 2. 在第$ k $次重复运行时,采集输入数据${u_k}(t)$,计算输出数据${y_k}(t)$ 3. While $k < {K_{{\rm{max}}} }$(其中${K_{{\rm{max}}} }$为最大迭代次数) 4. for each $t \in [0,N]$ 5. 通过式(16)和式(17)构造${\hat {\boldsymbol{\phi} } _{1,k} }(t)$和${\hat {\boldsymbol{\phi}} _k}(t)$ 6. 通过式(18)选取合适的${\mu _k}$ 7. 通过式(15)计算得出${\hat {\boldsymbol{\theta}} _k}(t)$ 8. 通过式(12)刷新${\hat {\boldsymbol{x}}_k}(t)$和式(13)刷新${\hat {\boldsymbol{v}}_k}(t)$ 9. end 10. end  下载: 导出CSV
下载: 导出CSV
表 2 采用迭代学习最小二乘算法(W-ILLS)计算
${\hat {\boldsymbol{\theta}} _k}(t)$ 的流程图输入:重复激励的一组数列 输出:堆积的输出向量${{\boldsymbol{Y}}_k}(t)$ 1. 对于所有的$t = 0,1, \cdots ,N$,给定参数估计初始值${\hat \theta _{ - 1}}(t) = 0$,迭代所需${x_0}(t)$和${v_0}(t)$的值,并置$k = 0$; 2. 在第$ k $次重复运行时,采集输入数据 ${u_k}(t)$,计算输出数据${y_k}(t)$ 3. While $k < {K_{{\rm{max}}} }$(其中${K_{{\rm{max}}} }$为最大迭代次数) 4. for each $t \in [0,N]$ 5. 通过式(26)和式(27)构造${\hat {\boldsymbol{\phi}} _{1,k} }(t)$和${\hat {\boldsymbol{\phi}} _k}(t)$ 6. 通过式(21)计算得出${\hat {\boldsymbol{\theta}} _k}(t)$,式(22)刷新${{\boldsymbol{P}}_k}(t)$ 7. 通过式(23)刷新${\hat {\boldsymbol{x}}_k}(t)$,式(24)刷新${\hat {\boldsymbol{v}}_k}(t)$,式(25)刷新${e_k}(t)$ 8. End 9. End
下载: 导出CSV
-
[1] 丁锋. 系统辨识新论[M]. 北京: 科学出版社, 2013: 37–38. [2] GIRI F and BAI Erwei. Block-oriented Nonlinear System Identification[M]. London: Springer, 2010: 3–11. doi: 10.1007/978-1-84996-513-2_1. [3] DING Feng, LIU Ximei, and LIU Manman. The recursive least squares identification algorithm for a class of wiener nonlinear systems[J]. Journal of the Franklin Institute, 2016, 353(7): 1518–1526. doi: 10.1016/j.jfranklin.2016.02.013 [4] JIN Xing, HUANG Biao, and SHOOK D S. Multiple model LPV approach to nonlinear process identification with EM algorithm[J]. Journal of Process Control, 2011, 21(1): 182–193. doi: 10.1016/j.jprocont.2010.11.008 [5] ZHOU Lincheng, LI Xiangli, and PAN Feng. Gradient-based iterative identification for MISO Wiener nonlinear systems: Application to a glutamate fermentation process[J]. Applied Mathematics Letters, 2013, 26(8): 886–892. doi: 10.1016/j.aml.2013.03.015 [6] PELCKMANS K. Minlip for the identification of monotone Wiener systems[J]. Automatica, 2011, 47(10): 2298–2305. doi: 10.1016/j.automatica.2011.08.026 [7] VÖRÖS J. Parameter identification of Wiener systems with multisegment piecewise-linear nonlinearities[J]. Systems & Control Letters, 2007, 56(2): 99–105. doi: 10.1016/j.sysconle.2006.08.001 [8] YU Feng, MAO Zhizhong, and HE Dakuo. Identification of time-varying Hammerstein-Wiener systems[J]. IEEE Access, 2020, 8: 136906–136916. doi: 10.1109/ACCESS.2020.3011608 [9] WANG Dongqing and DING Feng. Least squares based and gradient based iterative identification for Wiener nonlinear systems[J]. Signal Processing, 2011, 91(5): 1182–1189. doi: 10.1016/j.sigpro.2010.11.004 [10] HAGENBLAD A, LJUNG L, and WILLS A. Maximum likelihood identification of Wiener models[J]. Automatica, 2008, 44(11): 2697–2705. doi: 10.1016/j.automatica.2008.02.016 [11] HU Yuanbiao, LIU Baolin, ZHOU Qin, et al. Recursive extended least squares parameter estimation for wiener nonlinear systems with moving average noises[J]. Circuits, Systems, and Signal Processing, 2014, 33(2): 655–664. doi: 10.1007/s00034-013-9652-x [12] MZYK G and WACHEL P. Wiener system identification by input injection method[J]. International Journal of Adaptive Control and Signal Processing, 2020, 34(8): 1105–1119. doi: 10.1002/acs.3124 [13] BAI Erwei. A blind approach to the Hammerstein–Wiener model identification[J]. Automatica, 2002, 38(6): 967–979. doi: 10.1016/S0005-1098(01)00292-8 [14] LACY S L and BERNSTEIN D S. Identification of FIR Wiener systems with unknown, noninvertible, polynomial nonlinearities[C]. Proceedings of 2002 American Control Conference, Anchorage, USA, 2002: 893–898. [15] LJUNG L. System Identification[M]. WEBSTER J G. Wiley Encyclopedia of Electrical and Electronics Engineering. New York: John Wiley, 1999: 315–311. doi: 10.1002/047134608X.W1046. [16] 孙明轩, 毕宏博. 学习辨识: 最小二乘算法及其重复一致性[J]. 自动化学报, 2012, 38(5): 698–706. doi: 10.3724/SP.J.1004.2012.00698SUN Mingxuan and BI Hongbo. Learning identification: Least squares algorithms and their repetitive consistency[J]. Acta Automatica Sinica, 2012, 38(5): 698–706. doi: 10.3724/SP.J.1004.2012.00698 [17] 孙明轩, 毕宏博. 最小二乘学习辨识[C]. 第三十届中国控制会议, 烟台, 中国, 2011: 1615–1620.SUN Mingxuan and BI Hongbo. Least squares learning identification[C]. Proceedings of the 30th Chinese Control Conference, Yantai, China, 2011: 1615–1620. [18] HAMMAR K, DJAMAH T, and BETTAYEB M. Nonlinear system identification using fractional Hammerstein-Wiener models[J]. Nonlinear Dynamics, 2019, 98(3): 2327–2338. doi: 10.1007/s11071-019-05331-9 [19] DING Feng, LIU P X, and LIU Guangjun. Gradient based and least-squares based iterative identification methods for OE and OEMA systems[J]. Digital Signal Processing, 2010, 20(3): 664–677. doi: 10.1016/j.dsp.2009.10.012 [20] DING Feng, SHI Yang, and CHEN Tongwen. Performance analysis of estimation algorithms of nonstationary ARMA processes[J]. IEEE Transactions on Signal Processing, 2006, 54(3): 1041–1053. doi: 10.1109/TSP.2005.862845 [21] DING Feng, XU Ling, MENG Dandan, et al. Gradient estimation algorithms for the parameter identification of bilinear systems using the auxiliary model[J]. Journal of Computational and Applied Mathematics, 2019, 369: 112575. doi: 10.1016/j.cam.2019.112575 -






图(4) / 表(2)
计量
- 文章访问数: 1314
- HTML全文浏览量: 816
- PDF下载量: 65
- 被引次数: 0
 下载:
下载:
