

Radial Error Analysis and Compensation for Forward Looking Scanning Sonar Imaging
-
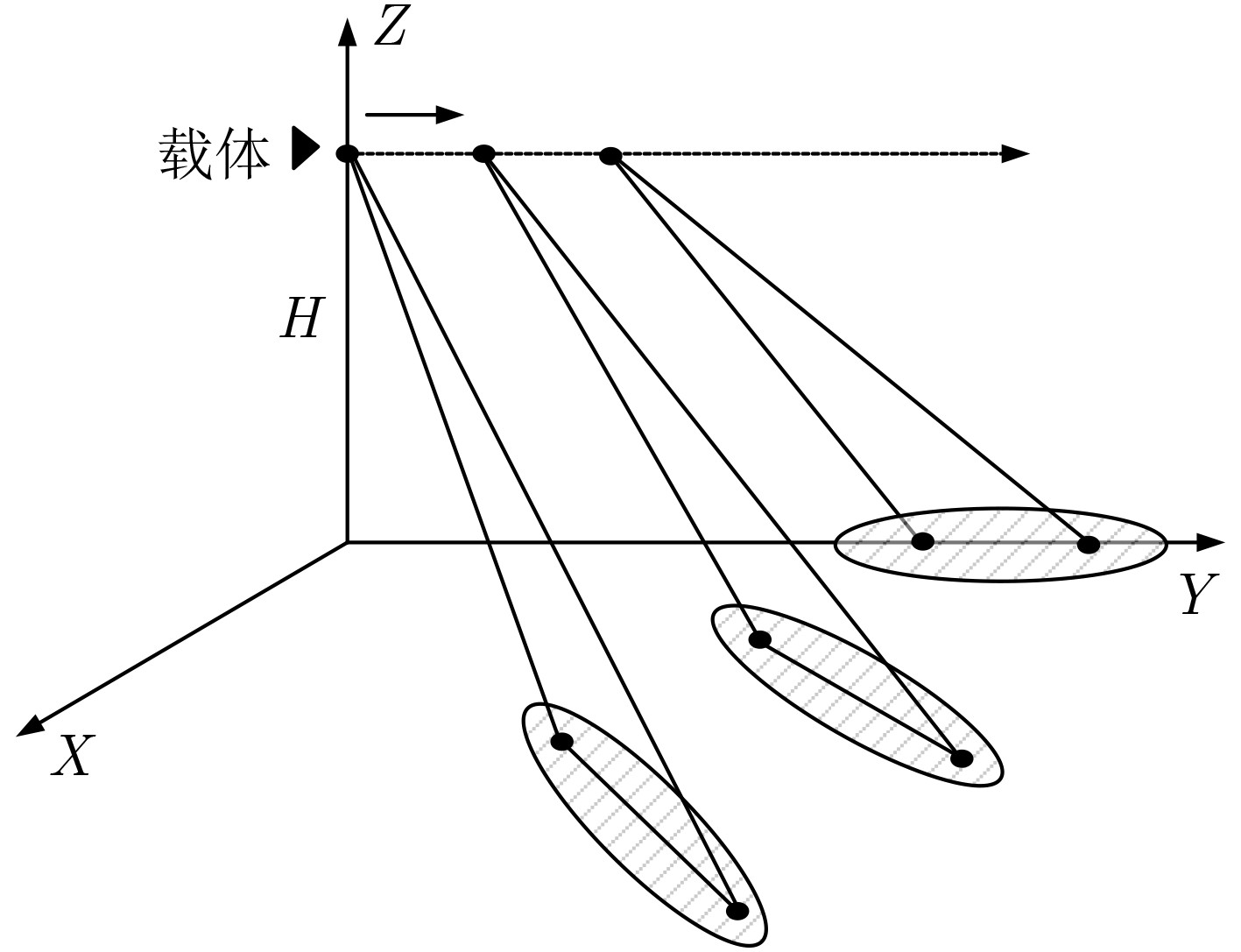
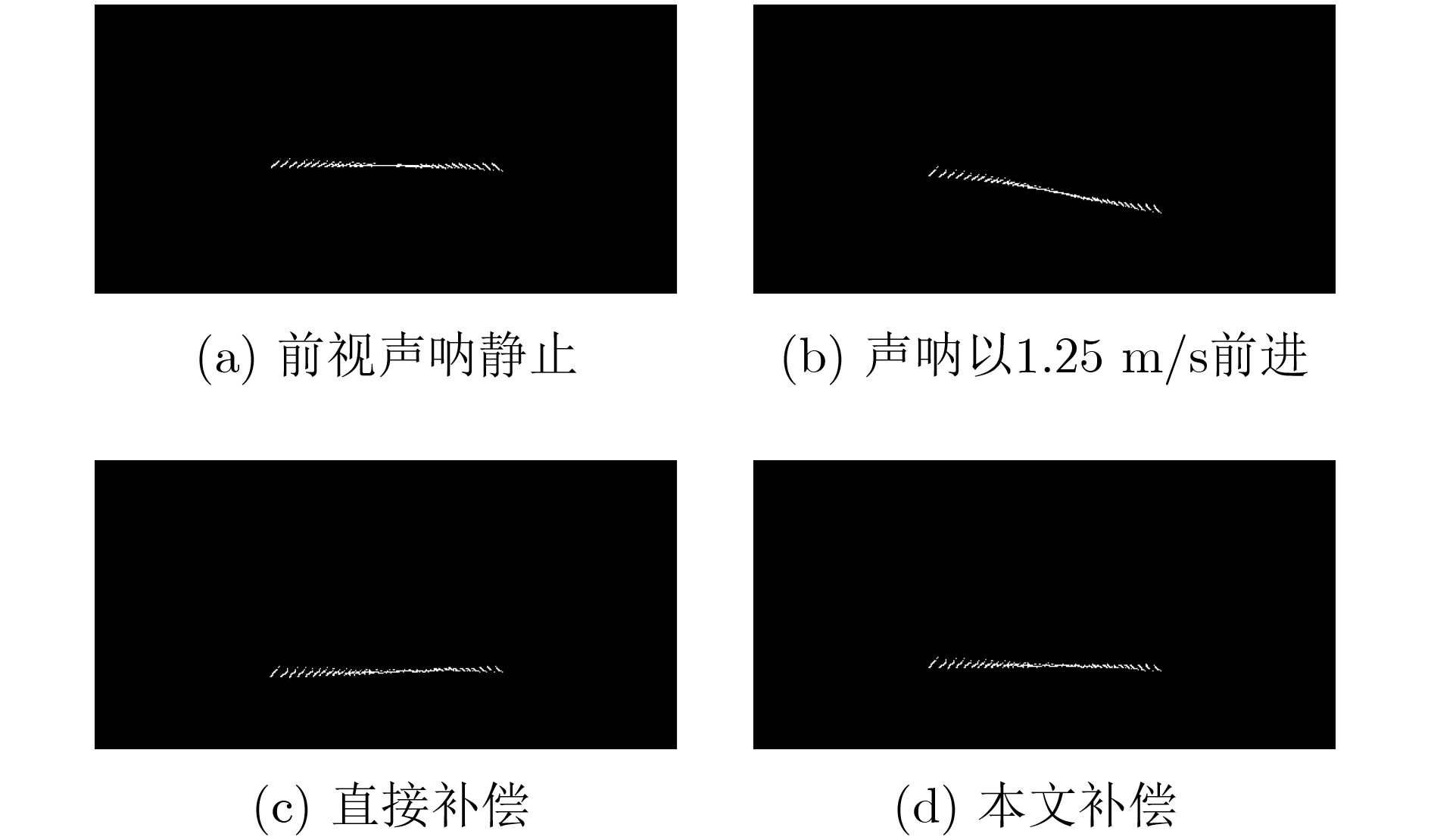
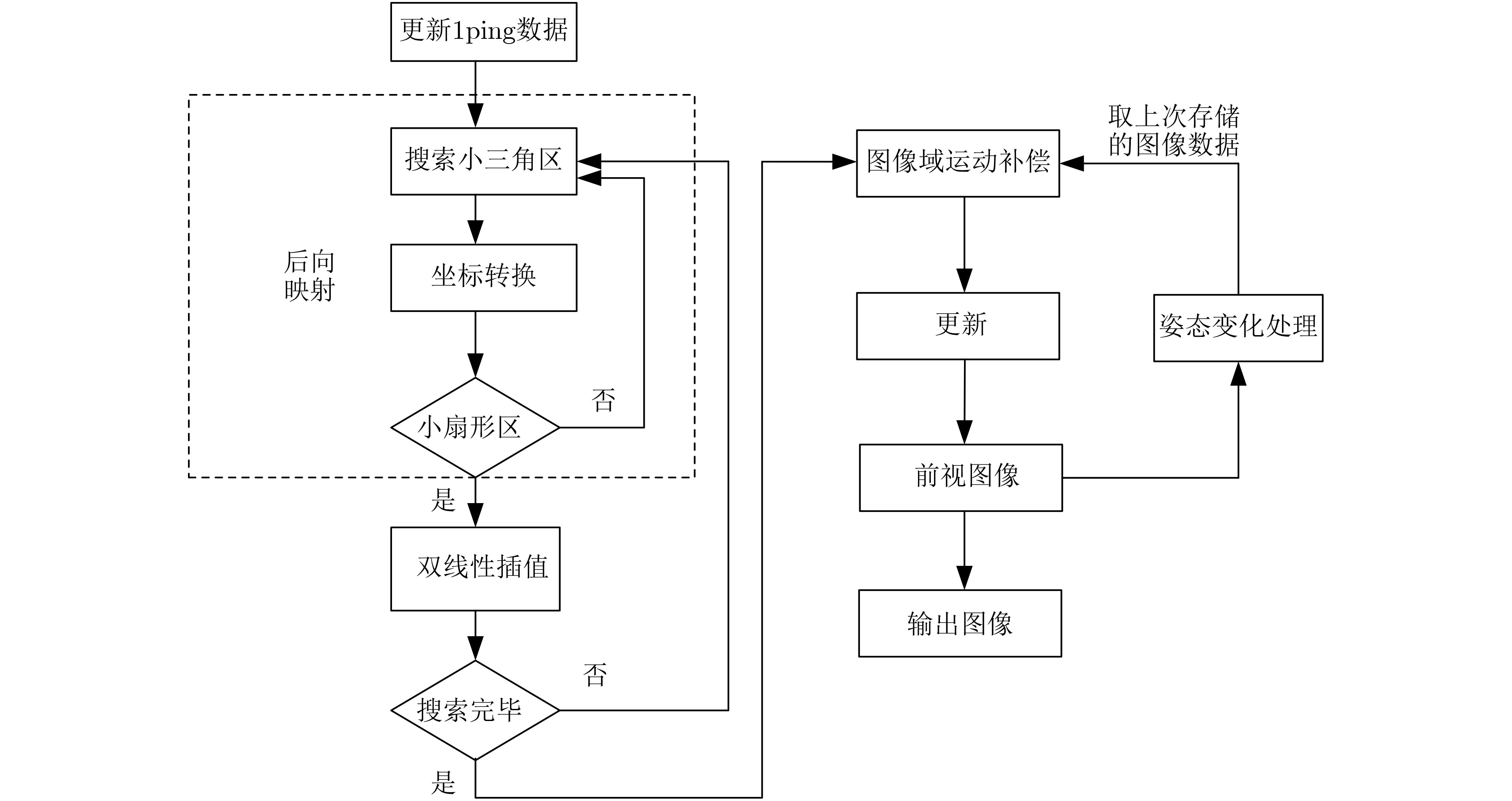
摘要: 该文提出了一种基于运动补偿的前视扫描声呐成像方法:采用后向映射,将扇形成像区域的直角坐标系转换成极坐标系,在极坐标系进行2维插值,提取幅度并转成图像格式。通过建立载体运动模型,分析载体运动,将载体运动影响转换为图像域移动,对前视声呐图像进行实时运动补偿,消除径向误差。分析了“深海勇士”号前视声呐数据,其单幅图像最大径向误差近似达到工作距离的19%。通过仿真和实验验证所提算法补偿了由载体运动造成的图像的径向误差,能准确表示目标信息。Abstract: Imaging method based on motion compensation for forward-looking scanning sonar is proposed. By using backward mapping, sector imaging region in the Cartesian coordinate system is converted into polar coordinates. Then two-dimension interpolation is employed in polar coordinates, and the amplitude is extracted and converted into image format. The vehicle motion model is established and analyzed, and vehicle motion is transformed into image domain motion. Real-time motion compensation for forward-looking sonar image is made eliminate radial errors. The forward-looking sonar data of the “Deep Sea Warrior” is analyzed. The maximum radial error of the single image is approximately 19% of the range. The simulation and experimental results show that this algorithm compensates the radial error of the image caused by the motion, which can represent the target information accurately.
-
Key words:
- Forward-looking sonar /
- Backward mapping /
- Bilinear interpolation /
- Sonar imaging /
- Radial error /
- Motion compensation
-
邢炜. 基于前视声呐的AUV避障方法研究[D]. [硕士论文], 哈尔滨工程大学, 2019: 1–10.XING Wei. Research on AUV obstacle avoidance method based on forward-looking sonar[D]. [Master dissertation], Harbin Engineering University, 2019: 1–10. 王子麒. 基于前视声呐的水下目标探测与跟踪算法研究及系统实现[D]. [硕士论文], 哈尔滨工程大学, 2019: 1–8.WANG Ziqi. Algorithm research and system implementation of underwater target detection and tracking based on forward-looking sonar[D]. [Master dissertation], Harbin Engineering University, 2019: 1–8. 王一童, 何波. 基于前视扫描声纳的成像与目标特征提取[J]. 微计算机信息, 2010, 26(14): 141–143. doi: 10.3969/j.issn.2095-6835.2010.14.058WANG Yitong and HE Bo. Image building and features extraction based on forward-looking scanning sonar[J]. Microcomputer Information, 2010, 26(14): 141–143. doi: 10.3969/j.issn.2095-6835.2010.14.058 张家敏, 曾庆军, 朱志宇, 等. 自主式水下机器人控制系统及声呐目标识别[J]. 中国舰船研究, 2018, 13(6): 94–100. doi: 10.19693/j.issn.1673-3185.01192ZHANG Jiamin, ZENG Qingjun, ZHU Zhiyu, et al. AUV control system and sonar target identification[J]. Chinese Journal of Ship Research, 2018, 13(6): 94–100. doi: 10.19693/j.issn.1673-3185.01192 WANG Xingmei, WANG Guoqiang, ZHAO Zhonghua, et al. An improved kernelized correlation filter algorithm for underwater target tracking[J]. Applied Sciences, 2018, 8(11): 2154. doi: 10.3390/app8112154 王国强. 前视声纳水下目标跟踪技术研究[D]. [硕士论文], 哈尔滨工程大学, 2019: 1–8.WANG Guoqiang. Research on underwater target tracking technology of forward looking sonar[D]. [Master dissertation], Harbin Engineering University, 2019: 1–8. 寇贤聪. 前视声纳图像目标跟踪系统研究[D]. [硕士论文], 哈尔滨工程大学, 2013: 8–13.KOU Xiancong. Research on tracking system of forward-looking sonar image[D]. [Master dissertation], Harbin Engineering University, 2013: 8–13. 孙泽锐, 王继军, 李国祥, 等. 基于插值图像的可逆信息隐藏算法[J]. 山东大学学报: 理学版, 2018, 53(1): 46–52. doi: 10.6040/j.issn.1671-9352.2.2017.377SUN Zerui, WANG Jijun, LI Guoxiang, et al. New reversible data hiding algorithm based on interpolation images[J]. Journal of Shandong University:Natural Science, 2018, 53(1): 46–52. doi: 10.6040/j.issn.1671-9352.2.2017.377 赵旦峰, 王博, 杨大伟. 一种边缘定向平滑图像插值算法[J]. 电子与信息学报, 2012, 34(7): 1543–1546. doi: 10.3724/SP.J.1146.2011.01275ZHAO Danfeng, WANG Bo, and YANG Dawei. An edge-directed smoothness algorithm for image interpolation[J]. Journal of Electronics &Information Technology, 2012, 34(7): 1543–1546. doi: 10.3724/SP.J.1146.2011.01275 KEYS R. Cubic convolution interpolation for digital image processing[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1981, 29(6): 1153–1160. doi: 10.1109/TASSP.1981.1163711 TRUCCO A, PALMESE M, and REPETTO S. Image projection and composition with a front-scan sonar system: Methods and experimental results[J]. IEEE Journal of Oceanic Engineering, 2003, 28(4): 687–698. doi: 10.1109/JOE.2003.819316 ZHANG Tiedong, WAN Lei, ZENG Wenjing et al. Object detection and tracking method of AUV based on acoustic vision[J]. China Ocean Engineering, 2012, 26(4): 623–636. doi: 10.1007/s13344-012-0047-8 WANG Xingmei, WANG Guoqiang, and ZHANG Wansong. Pseudo-color processing of forward looking sonar image: An adaptive hot metal coding algorithm[C]. 2018 Chinese Control and Decision Conference, Shenyang, China, 2018: 394–399. doi: 10.1109/CCDC.2018.8407165. 梁艳. 基于前视扫描成像声纳的AUV自主导航和定位算法及实验[D]. [硕士论文], 中国海洋大学, 2012: 34–37.LIANG Yan. AUV SLAM and experiment using a mechanical scanning forward-looking sonar[D]. [Master dissertation], Ocean University of China, 2012: 34–37. HURTÓS N, CUF’ X, PETILLOT Y, et al. Fourier-based registrations for two-dimensional forward-looking sonar image mosaicing[C]. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, 2012: 5298–5305. doi: 10.1109/IROS.2012.6385813. 张寅. 运动平台前视雷达超分辨成像理论与方法[D]. [博士论文], 电子科技大学, 2016: 11–12.ZHANG Yin. Theory and method of superresolution Imaging for forward-looking radar of moving platform[D]. [Ph. D. dissertation], University of Electronic Science and Technology of China, 2016: 11–12. -


 下载:
下载:









图(11) / 表(2)
计量
- 文章访问数: 1847
- HTML全文浏览量: 738
- PDF下载量: 93
- 被引次数: 0
