

Time of Arrival Estimation in Presence of Strong Interference
-
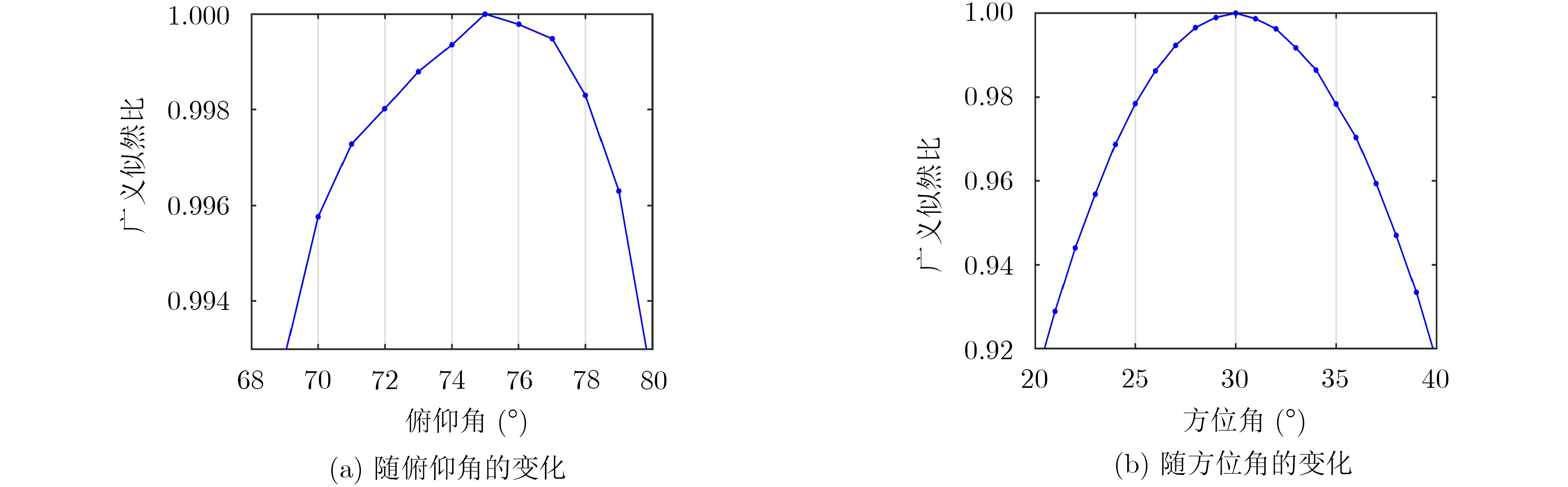
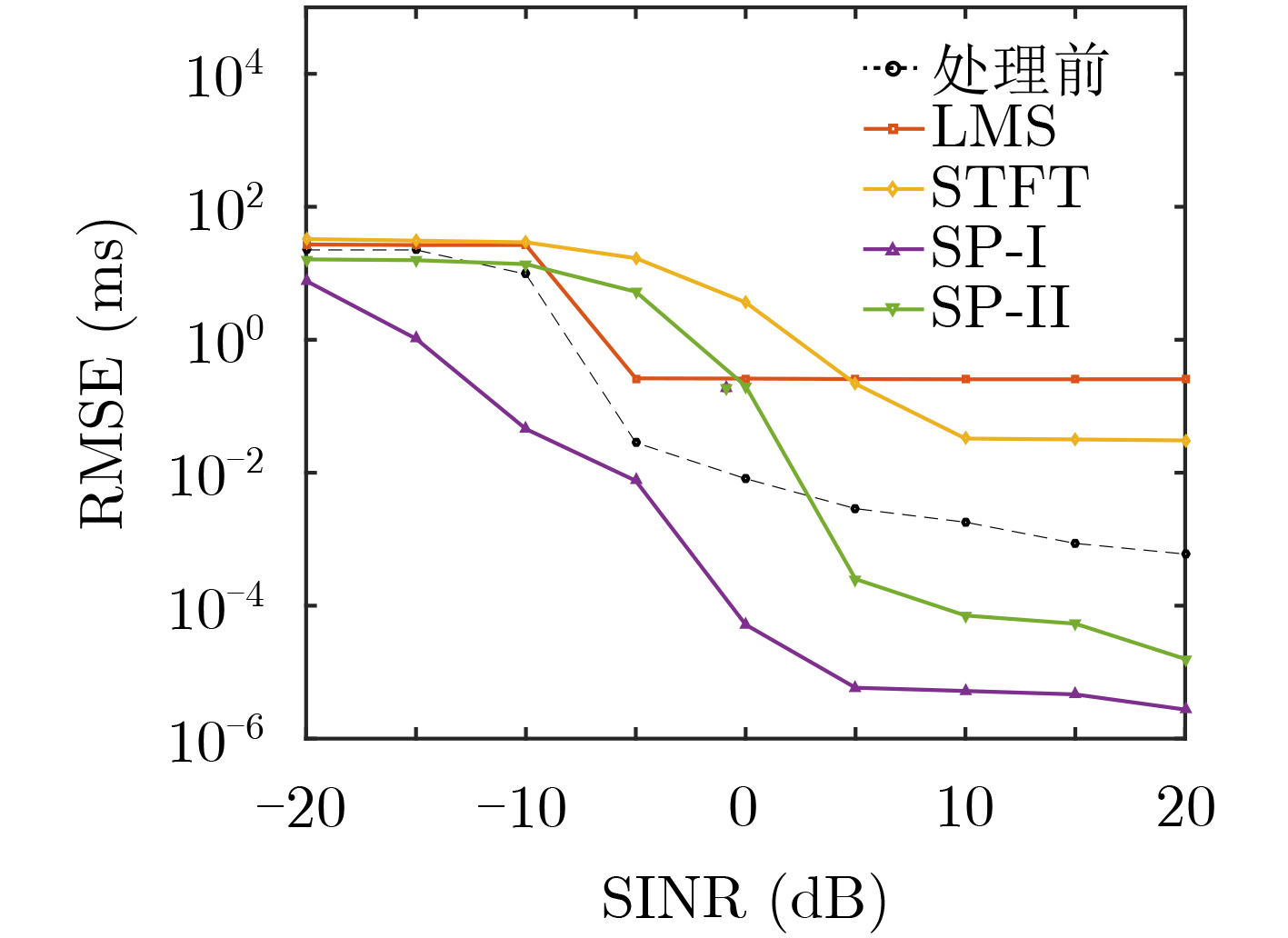
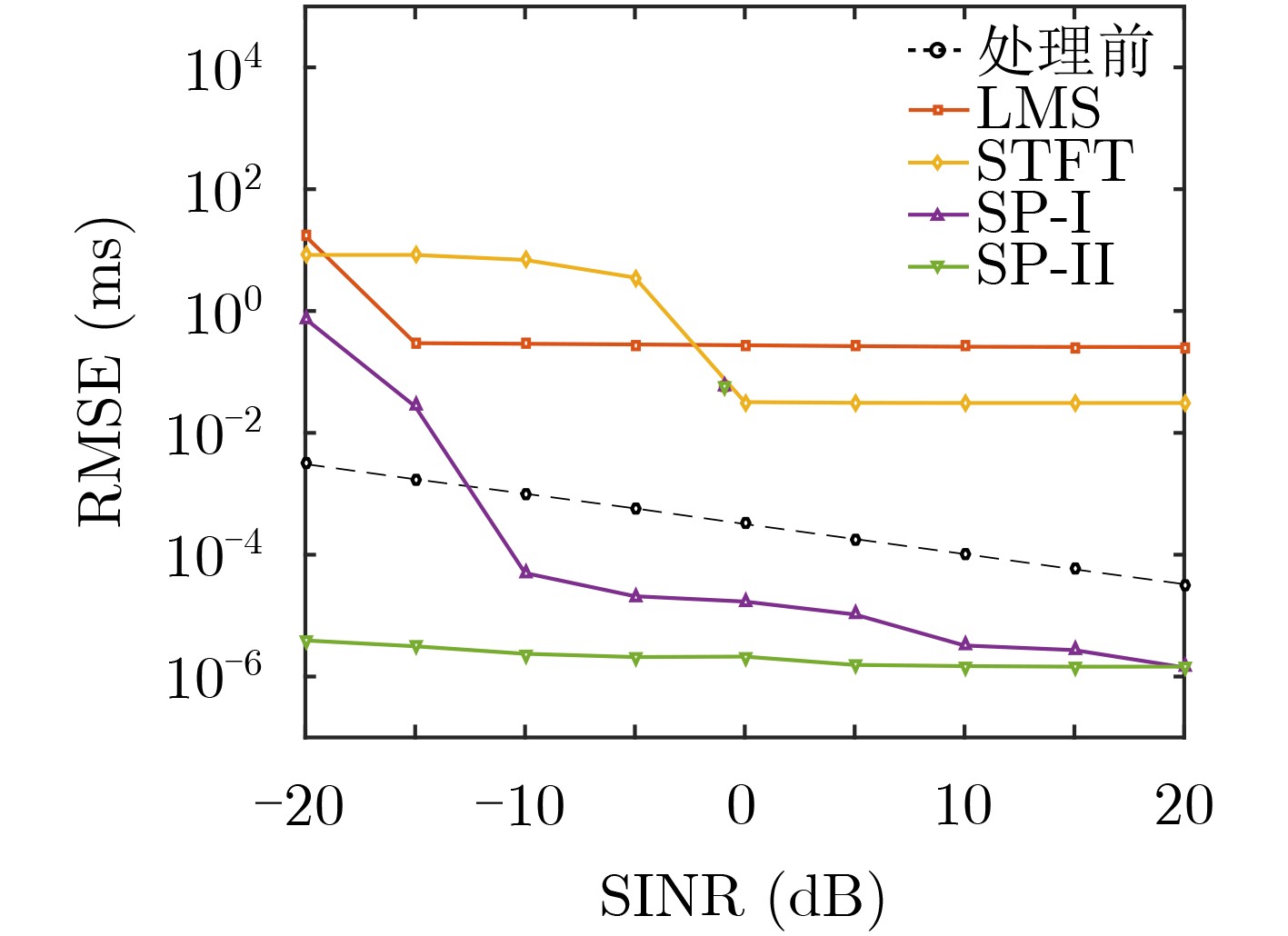
摘要: 水声定位系统是现代深海作业必备的高精度水下定位装备,精确的时延估计是实现高精度水声定位的基础,但由于信号远距离传输以及强干扰的影响,水声定位系统时延估计精度较低。针对此问题该文提出一种基于子空间理论的宽带强干扰抑制方法,首先通过贝叶斯信息量准则估计子空间维度,然后推导了不同信号假设下的概率密度函数,求解未知参数的最大似然估计,构造广义似然比并通过最优匹配广义似然比检测法估计与期望信号最匹配的子空间,然后以此构造空间投影算子对接收数据进行线性投影,最终抑制干扰和噪声,提高时延估计精度。仿真结果表明该方法能够有效抑制干扰和噪声的影响,提高定位系统时延估计精度。Abstract: The underwater positioning system is the essential and necessary equipment for modern deep-sea operations. Accurate time delay estimation is the basis for achieving high-precision localization. However, the performance of time delay estimation will decrease due to the long-distance transmission and strong clutter. To solve this problem, a novel interference suppression method based on the subspace theory is proposed. The dimension of the subspace is estimated using Bayesian information criterion at first, and the probability density function under different assumptions are then derived by estimating the unknown parameters to construct the generalized likelihood ratio. Finally, the most suitable subspace may be estimated using the optimal matching generalized likelihood ratio detection method. The projection operator is constructed to linearly project the received data, suppressing the interference and noise as a result of improving the accuracy of time delay estimation. The simulation results show that the proposed method can effectively suppress the influence of the clutter and improve the estimation accuracy of the time-delay.
-
孙大军, 郑翠娥, 张居成, 等. 水声定位导航技术的发展与展望[J]. 中国科学院院刊, 2019, 34(3): 331–338.SUN Dajun, ZHENG Cuie, ZHANG Jucheng, et al. Development and prospect for underwater acoustic positioning and navigation technology[J]. Bulletin of the Chinese Academy of Sciences, 2019, 34(3): 331–338. 孙大军, 郑翠娥, 钱洪宝, 等. 水声定位系统在海洋工程中的应用[J]. 声学技术, 2012, 31(2): 125–132. doi: 10.3969/j.issn1000-3630.2012.02.003SUN Dajun, ZHENG Cuie, QIAN Hongbao, et al. The application of underwater acoustic positioning systems in ocean engineering[J]. Technical Acoustics, 2012, 31(2): 125–132. doi: 10.3969/j.issn1000-3630.2012.02.003 王宇杰, 李宇, 鞠东豪, 等. 一种基于水下无人航行器的多目标被动跟踪算法[J]. 电子与信息学报, 2020, 42(8): 2013–2020. doi: 10.11999/JEIT190675WANG Yujie, LI Yu, JU Donghao, et al. A multi-target passive tracking algorithm based on unmanned underwater vehicle[J]. Journal of Electronics &Information Technology, 2020, 42(8): 2013–2020. doi: 10.11999/JEIT190675 CHEN H H. In-situ alignment calibration of attitude and ultra short baseline sensors for precision underwater positioning[J]. Ocean Engineering, 2008, 35(14/15): 1448–1462. BRYNER D, HUFFER F, SRIVASTAVA A, et al. Underwater minefield detection in clutter data using spatial point-process models[J]. IEEE Journal of Oceanic Engineering, 2016, 41(3): 670–681. doi: 10.1109/JOE.2015.2493598 DIANMANT R, KIPNIS D, BIGAL E, et al. An active acoustic track-before-detect approach for finding underwater mobile targets[J]. IEEE Journal of Selected Topics in Signal Processing, 2019, 13(1): 104–119. doi: 10.1109/JSTSP.2019.2899237 LIU Shengheng, MA Yahui, and HUANG Yongming. Sea clutter cancellation for passive radar sensor exploiting multi-channel adaptive filters[J]. IEEE Sensors Journal, 2019, 19(3): 982–995. ABRATKIEWICZ K, KRYSIK P, GAJO Z, et al. Target Doppler rate estimation based on the complex phase of STFT in passive forward scattering radar[J]. Sensors, 2019, 19(16): 3627. doi: 10.3390/s19163627 HE Zhoujie, TU Xiaotong, BAO Wenjie, et al. Gaussian-modulated linear group delay model: Application to second-order time-reassigned synchrosqueezing transform[J]. Signal Processing, 2020, 167: 107275. YANG T C. Deconvolved conventional beamforming for a horizontal line array[J]. IEEE Journal of Oceanic Engineering, 2018, 43(1): 160–172. doi: 10.1109/JOE.2017.2680818 HIGUCHI T, ITO N, ARAKI S, et al. Online MVDR beamformer based on complex Gaussian mixture model with spatial prior for noise robust ASR[J]. IEEE/ACM Transactions on Audio, Speech, and Language Processing, 2017, 25(4): 780–793. LØNMO T I B, AUSTENG A, and HANSEN R E. Improving swath sonar water column imagery and bathymetry with adaptive beamforming[J]. IEEE Journal of Oceanic Engineering, 2020, 45(4): 1552–1563. BOSE S and STEINHARDT A O. Adaptive array detection of uncertain rank one waveforms[J]. IEEE Transactions on Signal Processing, 1996, 44(11): 2801–2809. 张春海, 朱江, 张尔扬. 基于子空间跟踪的DSSS通信系统抗窄带干扰研究[J]. 电子与信息学报, 2007, 29(5): 1159–1162. doi: 10.3724/SP.J.1146.2005.01209ZHANG Chunhai, ZHU Jiang, and ZHANG Eryang. Subspace tracking-based research on narrowband interference suppression in DSSS communication systems[J]. Journal of Electronics &Information Technology, 2007, 29(5): 1159–1162. doi: 10.3724/SP.J.1146.2005.01209 周峰, 邢孟道, 保铮. 基于特征子空间滤波的SAR窄带干扰抑制方法[J]. 电子与信息学报, 2005, 27(5): 767–770.ZHOU Feng, XING Mengdao, and BAO Zheng. Narrow band interference suppression for SAR using Eigen-subspace based filtering[J]. Journal of Electronics &Information Technology, 2005, 27(5): 767–770. 张小飞, 徐大专. 基于斜投影的波束形成算法[J]. 电子与信息学报, 2008, 30(3): 585–588. doi: 10.3724/SP.J.1146.2006.01263ZHANG Xiaofei and XU Dazhuan. Oblique projection-based beamforming algorithm[J]. Journal of Electronics &Information Technology, 2008, 30(3): 585–588. doi: 10.3724/SP.J.1146.2006.01263 SCHARF L L and FRIEDLANDER B. Matched subspace detectors[J]. IEEE Transactions on Signal Processing, 1994, 42(8): 2146–2157. doi: 10.1109/78.301849 KWON H and NASRABADI N M. Kernel matched subspace detectors for hyperspectral target detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2006, 28(2): 178–194. GRONE R, JOHNSON C R, SÁ E M, et al. Positive definite completions of partial Hermitian matrices[J]. Linear Algebra and its Applications, 1984, 58: 109–124. SCHARF L L and MCCLOUD M L. Blind adaptation of zero forcing projections and oblique pseudo-inverses for subspace detection and estimation when interference dominates noise[J]. IEEE Transactions on Signal Processing, 2002, 50(12): 2938–2946. doi: 10.1109/TSP.2002.805245 GERSHMAN A B, NEMETH E, and BOHME J F. Experimental performance of adaptive beamforming in a sonar environment with a towed array and moving interfering sources[J]. IEEE Transactions on Signal Processing, 2000, 48(1): 246–250. BURNHAM K P and ANDERSON D R. Multimodel inference: Understanding AIC and BIC in model selection[J]. Sociological Methods & Research, 2004, 33(2): 261–304. BESSON O, SCHARF L L, and VINCENT F. Matched direction detectors and estimators for array processing with subspace steering vector uncertainties[J]. IEEE Transactions on Signal Processing, 2005, 53(12): 4453–4463. doi: 10.1109/TSP.2005.859336 -

 下载:
下载:




图(9)
计量
- 文章访问数: 1477
- HTML全文浏览量: 545
- PDF下载量: 128
- 被引次数: 0
