

Joint Direction of Arrival Estimation of Subarrays Based on Near-field Nulling Weight
-
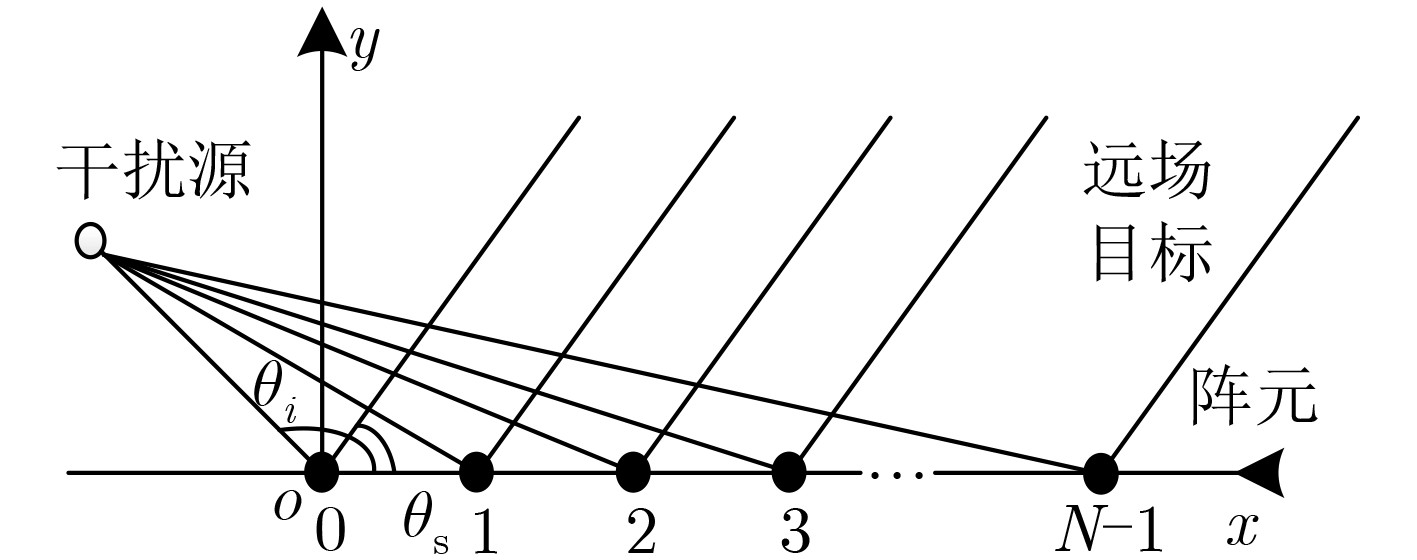
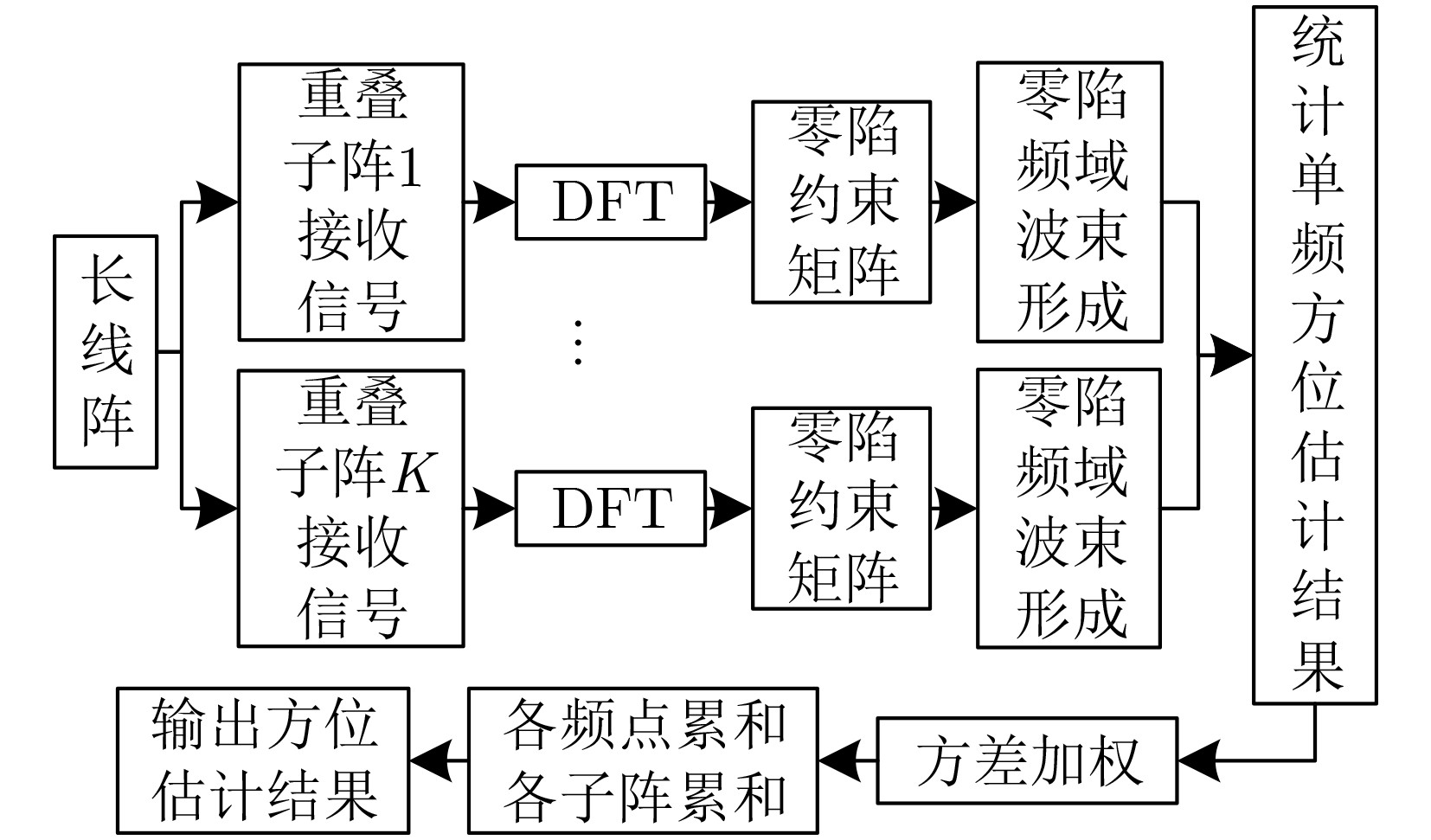
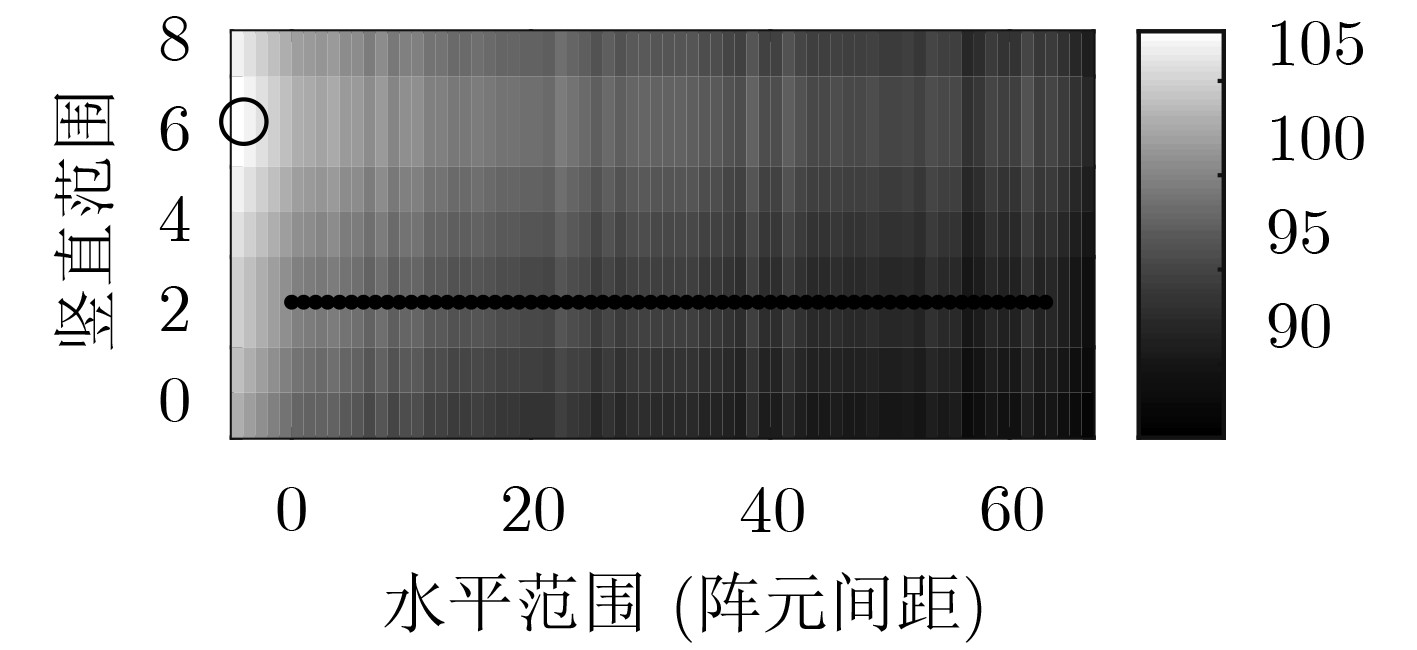
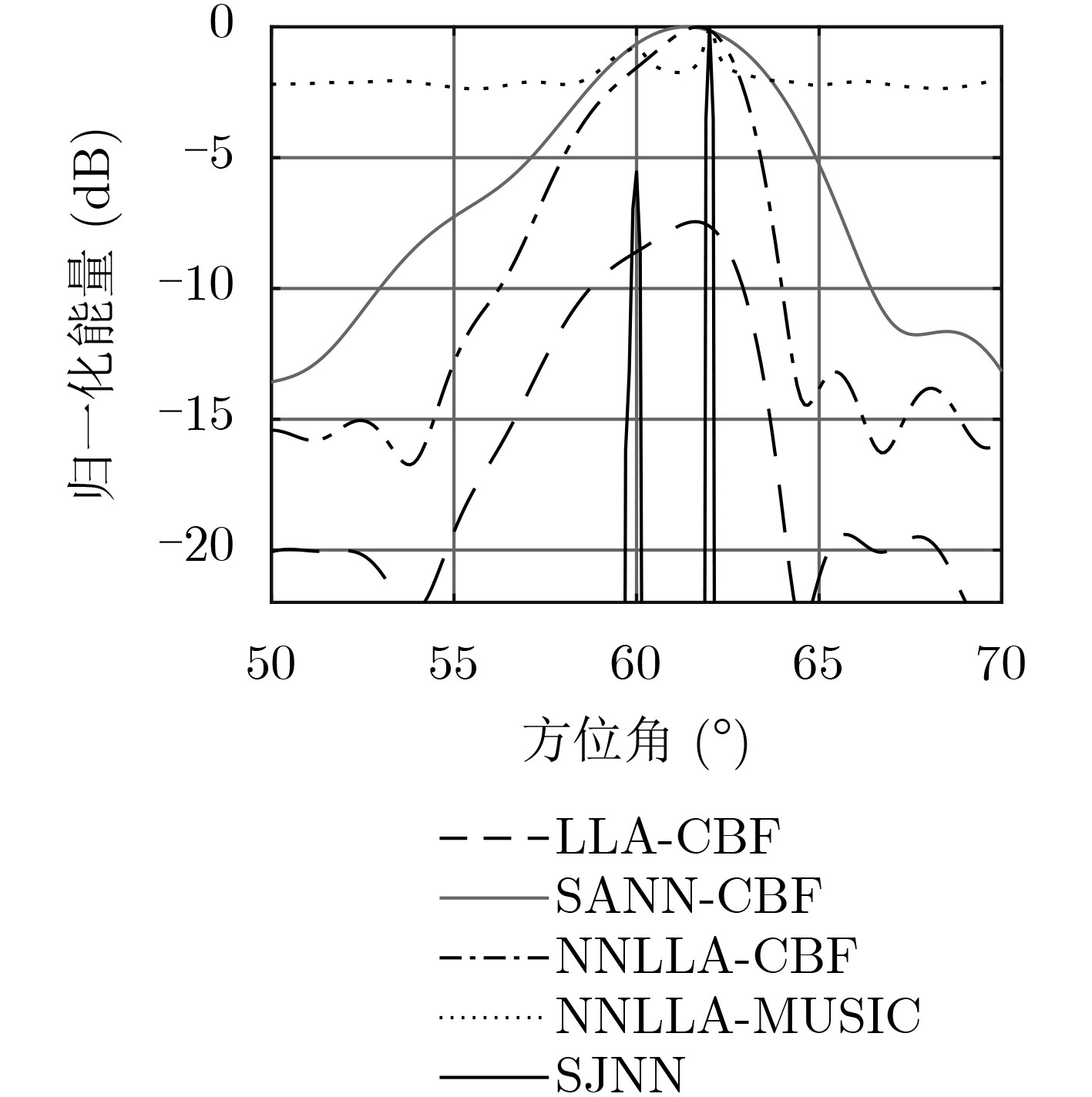
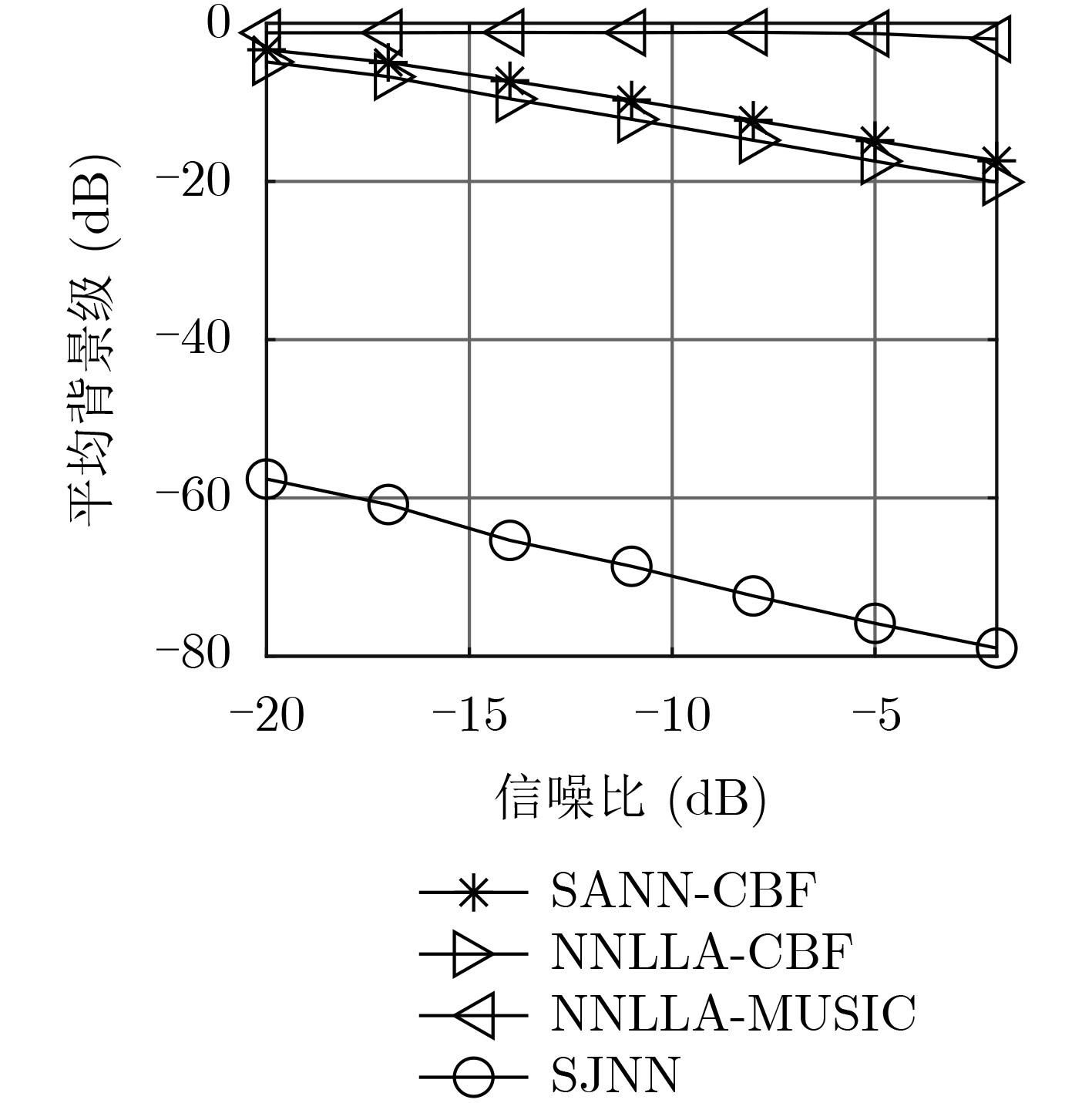
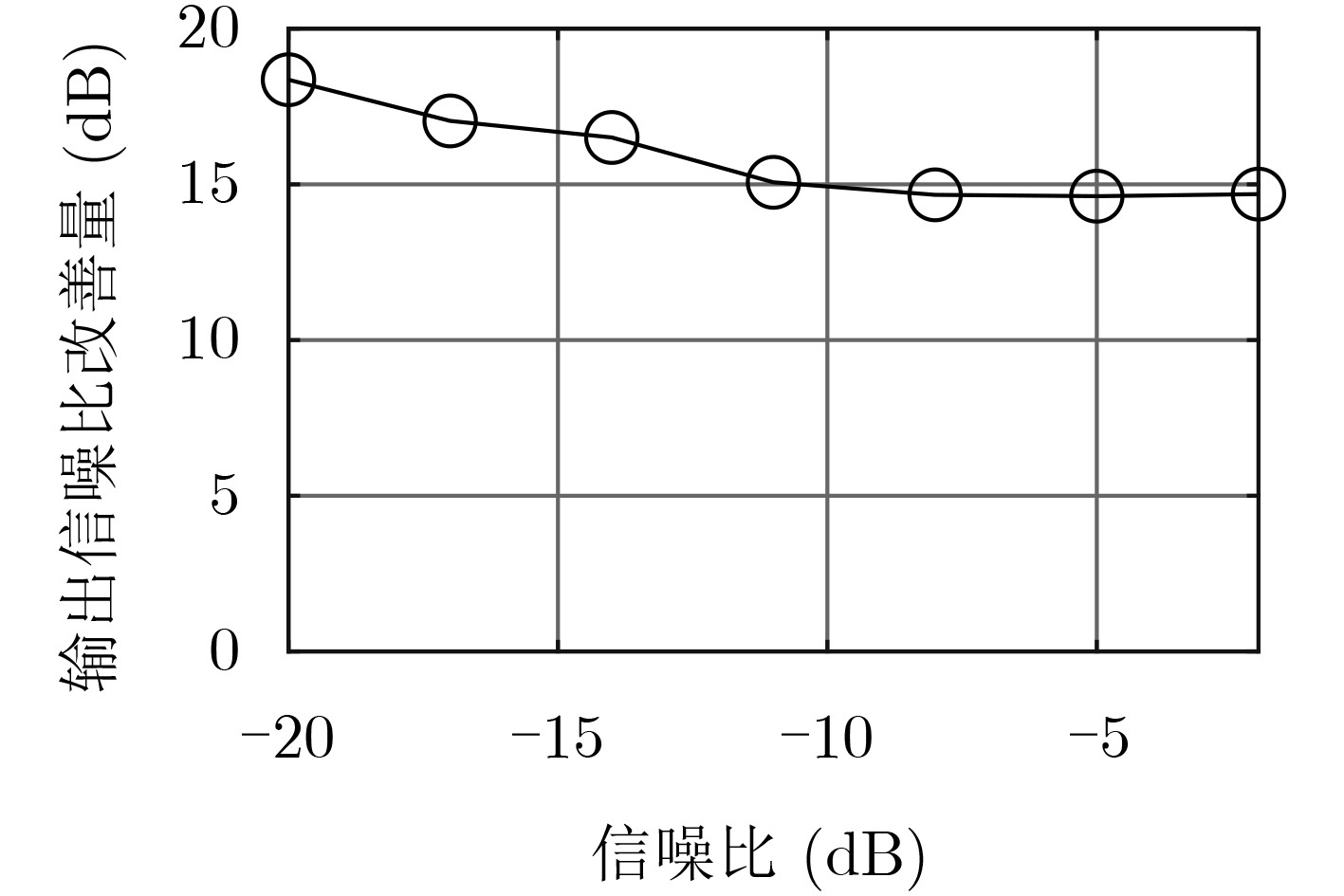
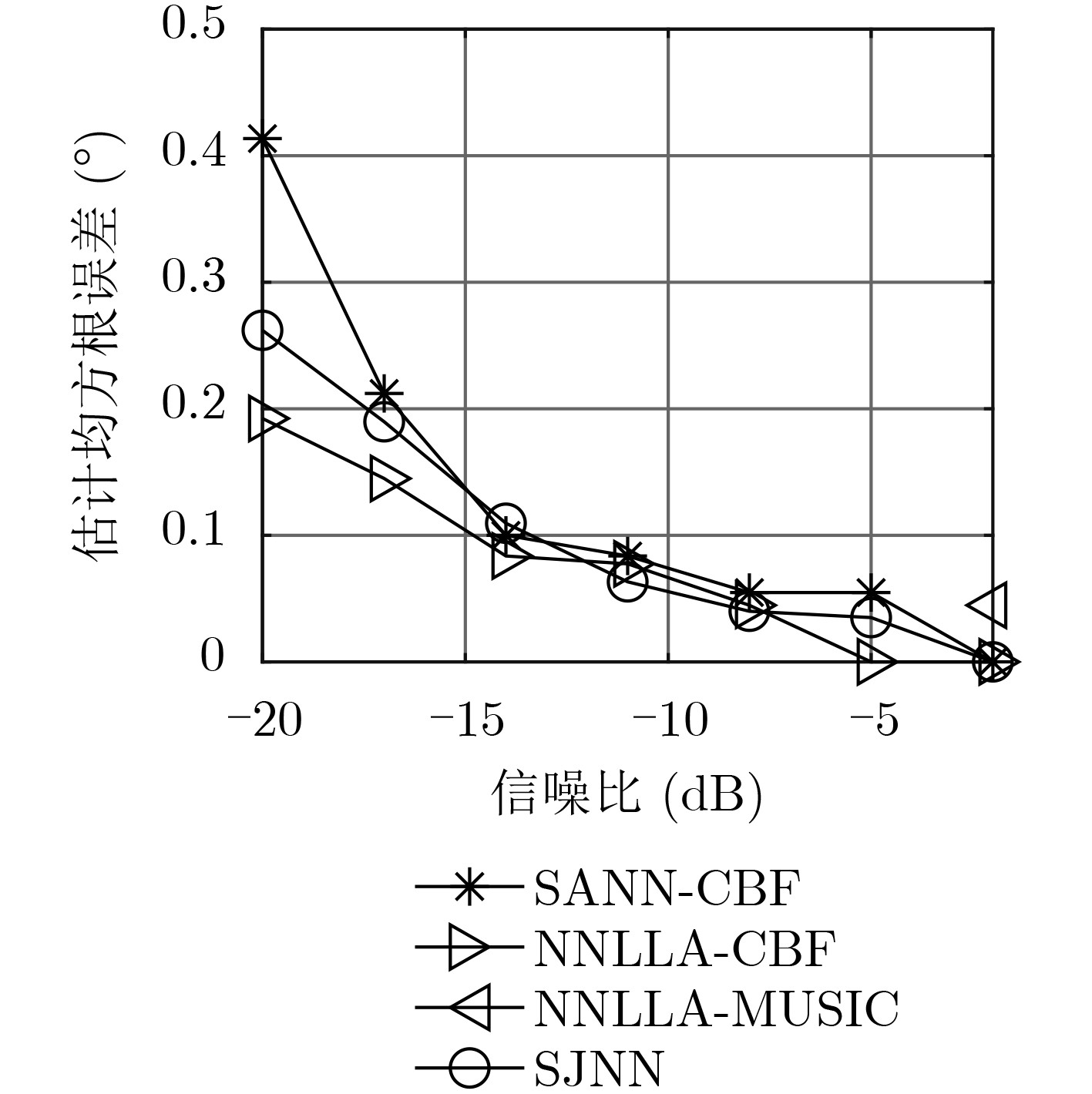
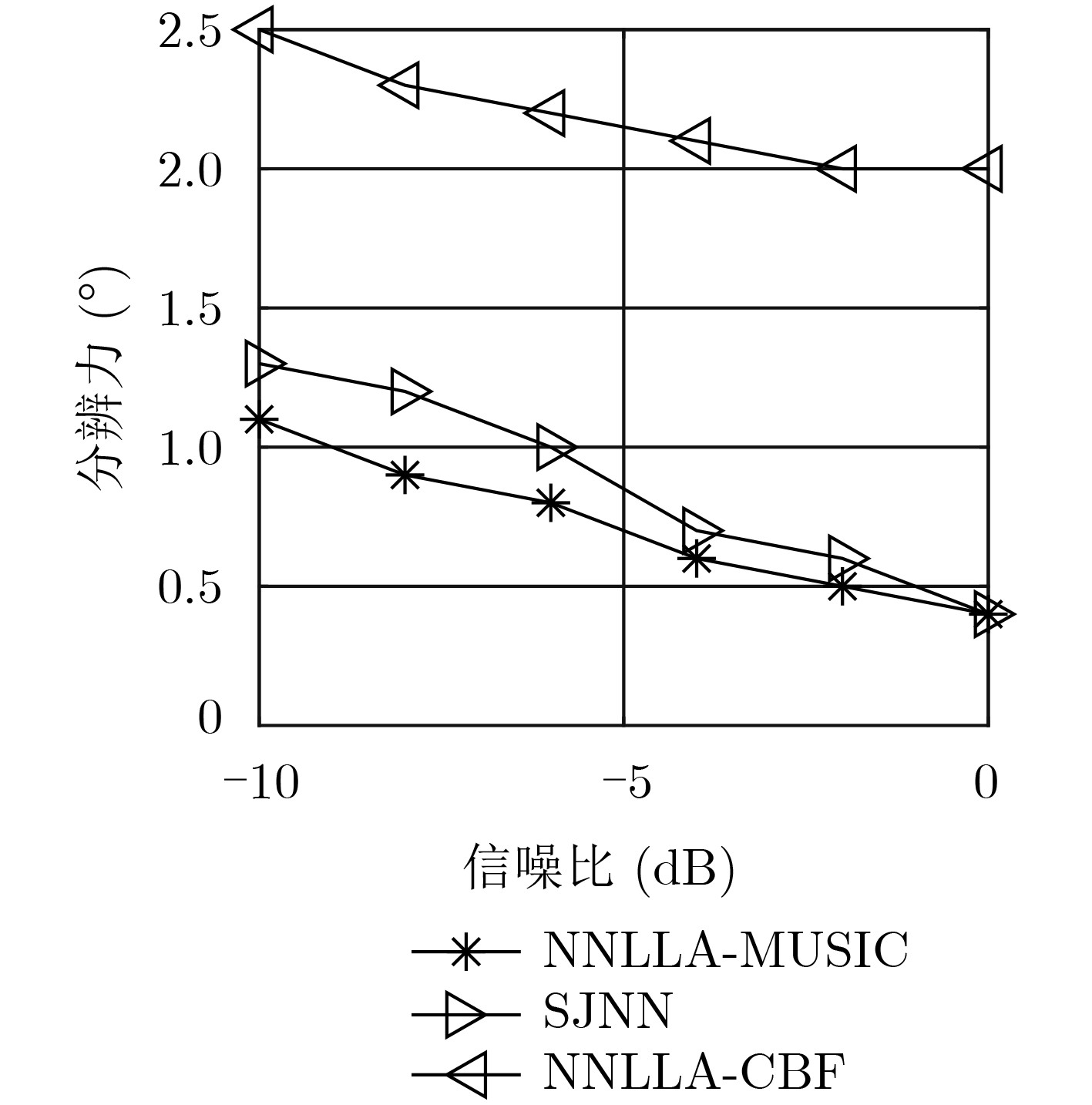
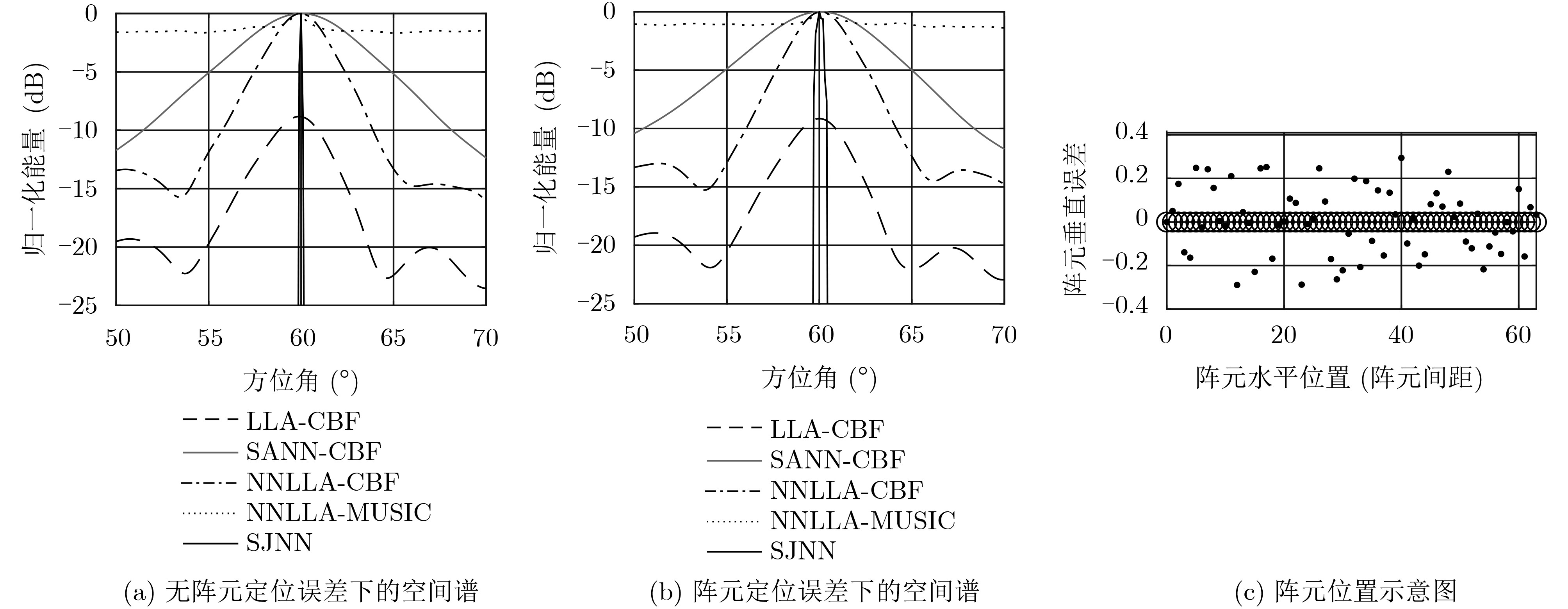
摘要: 针对海底长线阵在近场辐射声干扰及空间水平非均匀噪声下的远距离估计目标波达方向 (DoA)问题,该文提出一种基于长线阵分子阵近场零陷权的联合目标方位估计方法。该方法将长线阵分解为多个高重叠子阵,对各个子阵利用零陷抑制技术去除近场强干扰对目标探测的影响,再利用各子阵对远距离目标方位估计结果差异性小、非目标所在频率即噪声对应空间谱最大值随机的特点,空间频率方差加权综合各子阵的目标方位估计结果,从而抑制空间非均匀噪声,实现对远距离目标的探测。仿真结果表明,与长线阵常规波束形成、长线阵近场零陷常规波束形成、长线阵近场零陷传统多重信号分类方法相比,该文方法能够有效降低空间谱背景级60 dB以上,输出信噪比提高15 dB以上,具有较强的提高信噪比能力及较高的空间分辨力,因此具有较好的工程应用价值。Abstract: As for long-range target Direction of Arrival (DoA) estimation with benthonic long linear arrays under near-field acoustic interference and space non-stationary noise, a novel joint DoA estimation of subarrays algorithm is proposed, which is based on near-field nulling weight. The long linear array is divided into several high overlap subarrays. The near-field nulling weight is calculated for subarrays to eliminate the effect of the near-field interference on target detection. The spatial frequency variance weighted joint DoA method is presented based on the little discrepancy of the subarrays’ DoA estimates to repress the space nonuniform noise and detect the target in a long distance. The maximum value of spatial spectrum is random in the frequencies without the target because of the space non-stationary noise. The simulation results show that compared with long-linear-array conventional beamforming, long-linear-array conventional beamforming based on near-field nulling weight and long-linear-array multiple signal classification based on near-field nulling weight method, this proposed technique can effectively reduce the background level of spatial spectrum (over 60 dB), improve signal to noise ratio (above 15 dB) and has high spatial resolution, with better engineering application value.
-
LI Jun, LIN Qiuhua, KANG Chunyu, et al. DOA estimation for underwater wideband weak targets based on coherent signal subspace and compressed sensing[J]. Sensors, 2018, 18(3): 902. doi: 10.3390/s18030902 LIU Beiyi, GUI Guan, MATSUSHITA S Y, et al. Adaptive filtering algorithm for direction-of-arrival (DOA) estimation with small snapshots[J]. Digital Signal Processing, 2019, 94: 84–95. doi: 10.1016/j.dsp.2019.07.014 FU Hua, ABEYWICKRAMA S, YUEN C, et al. A robust phase-ambiguity-immune DOA estimation scheme for antenna array[J]. IEEE Transactions on Vehicular Technology, 2019, 68(7): 6686–6696. doi: 10.1109/TVT.2019.2916171 YANG T C. Deconvolved conventional beamforming for a horizontal line array[J]. IEEE Journal of Oceanic Engineering, 2018, 43(1): 160–172. doi: 10.1109/JOE.2017.2680818 VAN TREES H L. Optimum Array Processing: Part IV of Detection, Estimation, and Modulation Theory[M]. New York: Wiley & Sons, Inc., 2002: 440–446. SCHMIDT R. Multiple emitter location and signal parameter estimation[J]. IEEE Transactions on Antennas and Propagation, 1986, 34(3): 276–280. doi: 10.1109/TAP.1986.1143830 王旭东, 仲倩, 闫贺, 等. 一种二维信号波达方向估计的改进多重信号分类算法[J]. 电子与信息学报, 2019, 41(9): 2137–2142. doi: 10.11999/JEIT181090WANG Xudong, ZHONG Qian, YAN He, et al. An improved MUSIC algorithm for two dimensional direction of arrival estimation[J]. Journal of Electronics &Information Technology, 2019, 41(9): 2137–2142. doi: 10.11999/JEIT181090 ROY R and KAILATH T. ESPRIT-estimation of signal parameters via rotational invariance techniques[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1989, 37(7): 984–995. doi: 10.1109/29.32276 VAN VEEN B D and BUCKLEY K M. Beamforming: a versatile approach to spatial filtering[J]. IEEE ASSP Magazine, 1988, 5(2): 4–24. doi: 10.1109/53.665 鄢社锋, 侯朝焕, 马晓川. 矩阵空域预滤波目标方位估计[J]. 声学学报, 2007, 32(2): 151–157. doi: 10.3321/j.issn:0371-0025.2007.02.009YAN Shefeng, HOU Chaohuan, and MA Xiaochuan. Matrix spatial prefiltering approach for direction-of-arrival estimation[J]. Acta Acustica, 2007, 32(2): 151–157. doi: 10.3321/j.issn:0371-0025.2007.02.009 梅继丹, 生雪莉, 张颖, 等. 近场波束零陷权声图测量干扰抑制技术[J]. 哈尔滨工程大学学报, 2012, 33(5): 653–659. doi: 10.3969/j.issn.1006-7043.201105065MEI Jidan, SHENG Xueli, ZHANG Ying, et al. The near field focus null-forming weight interference sound sources suppression technology of the underwater acoustic image measurement[J]. Journal of Harbin Engineering University, 2012, 33(5): 653–659. doi: 10.3969/j.issn.1006-7043.201105065 MOGHADDAMJOO A. Transform-based covariance differencing approach to the array with spatially nonstationary noise[J]. IEEE Transactions on Signal Processing, 1991, 39(1): 219–221. doi: 10.1109/78.80789 LIU Ke and ZHANG Y D. Coprime array-based DoA estimation in unknown nonuniform noise environment[J]. Digital Signal Processing, 2018, 79: 66–74. doi: 10.1016/j.dsp.2018.04.003 吴云韬, 廖桂生, 张光斌. 空间非平稳噪声环境下的DoA估计新算法[J]. 西安电子科技大学学报: 自然科学版, 2003, 30(1): 51–54. doi: 10.3969/j.issn.1001-2400.2003.01.012WU Yuntao, LIAO Guisheng, and ZHANG Guangbin. A novel method for estimating DoA in the presence of spatially nonstationary noise fields[J]. Journal of Xidian University, 2003, 30(1): 51–54. doi: 10.3969/j.issn.1001-2400.2003.01.012 黄俊生, 苏洪涛. 二维相控阵-MIMO雷达联合发射子阵划分和波束形成设计方法[J]. 电子与信息学报, 2020, 42(7): 1557–1565. doi: 10.11999/JEIT190429HUANG Junsheng and SU Hongtao. Joint Transmitting subarray partition and beamforming design method based on two-dimensional phased-MIMO radar[J]. Journal of Electronics &Information Technology, 2020, 42(7): 1557–1565. doi: 10.11999/JEIT190429 陈新华, 鲍习中, 李启虎, 等. 水下声信号未知频率的目标检测方法研究[J]. 兵工学报, 2012, 33(4): 471–475.CHEN Xinhua, BAO Xizhong, LI Qihu, et al. Research on detection of underwater acoustic signal with unknown frequency[J]. Acta Armamentarii, 2012, 33(4): 471–475. 邹吉武, 孙大军. 线阵双基地声纳波束零点形成MUSIC算法[J]. 兵工学报, 2010, 31(3): 364–368.ZOU Jiwu and SUN Dajun. MUSIC algorithm of beam null forming on linear array of bi-static sonar[J]. Acta Armamentarii, 2010, 31(3): 364–368. -

 下载:
下载:



图(10)
计量
- 文章访问数: 1107
- HTML全文浏览量: 944
- PDF下载量: 81
- 被引次数: 0
