

Underwater Cooperative Target Localization Method Based on Double Orthogonal Moving Autonomous Underwater Vehicles
-
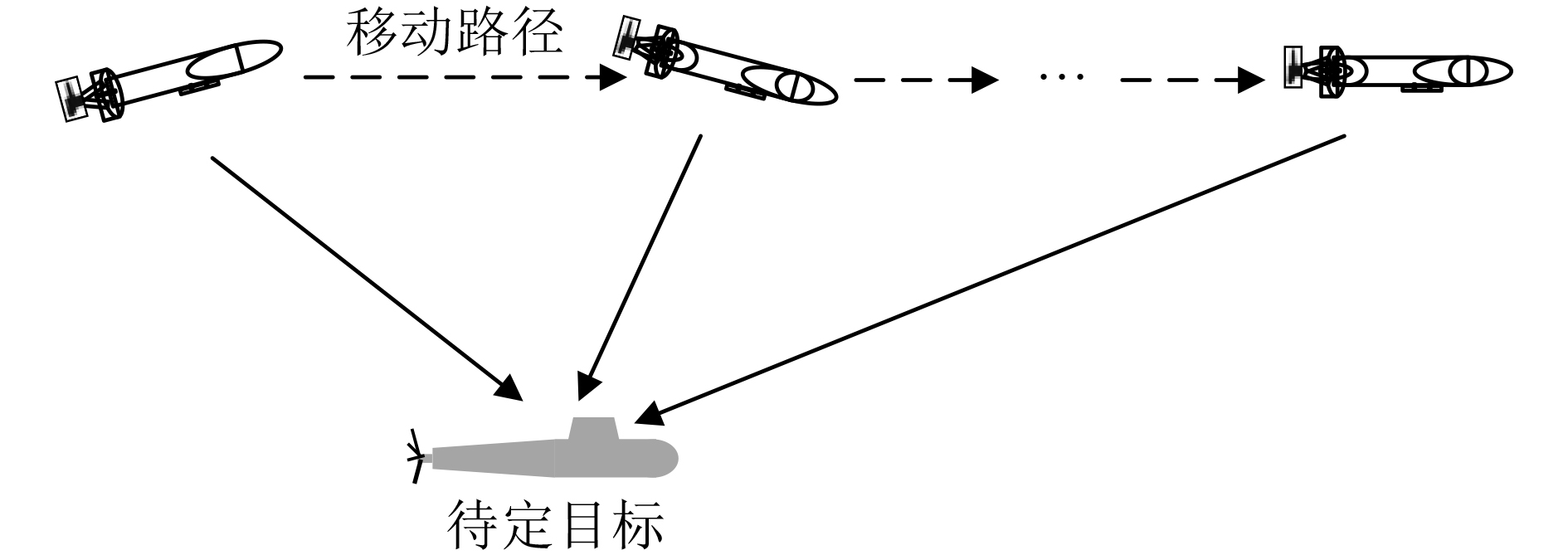
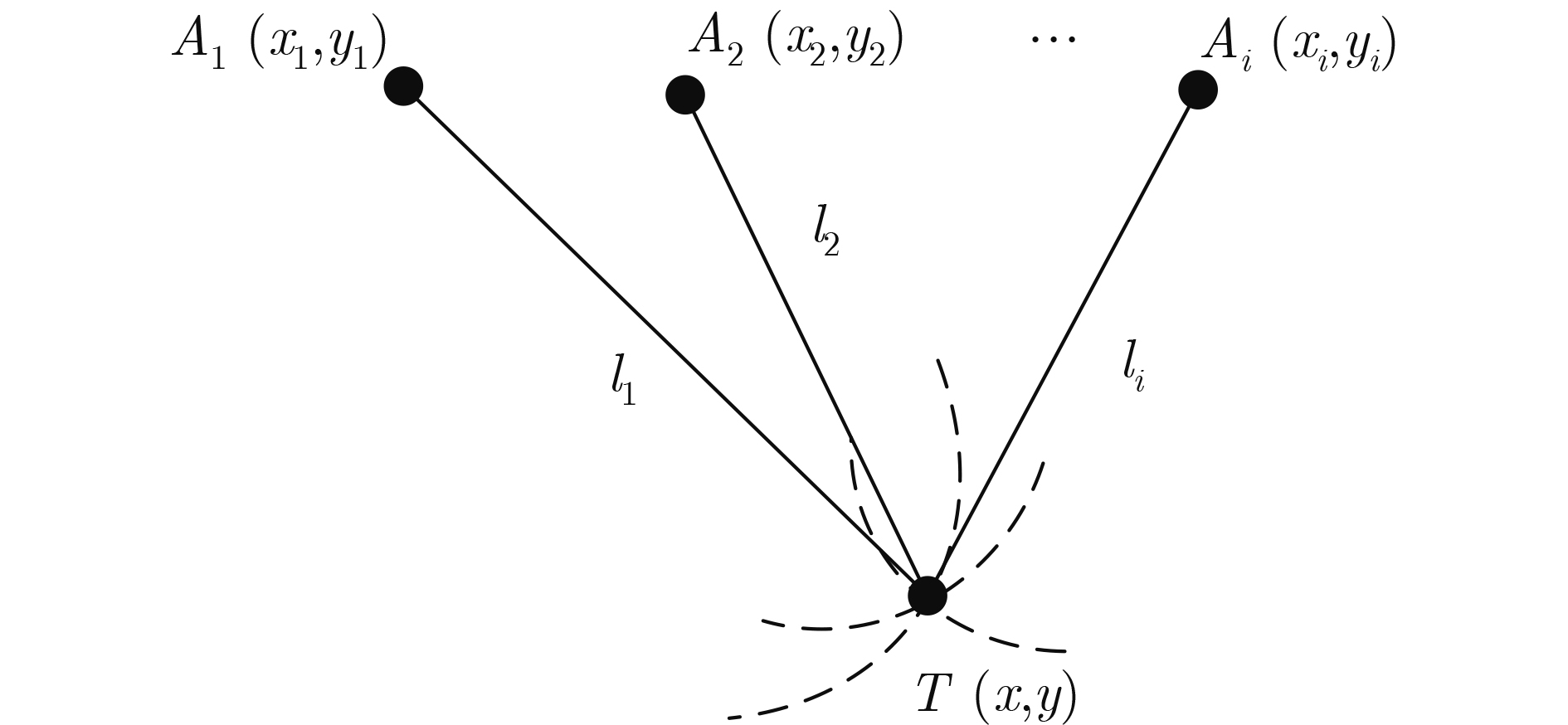
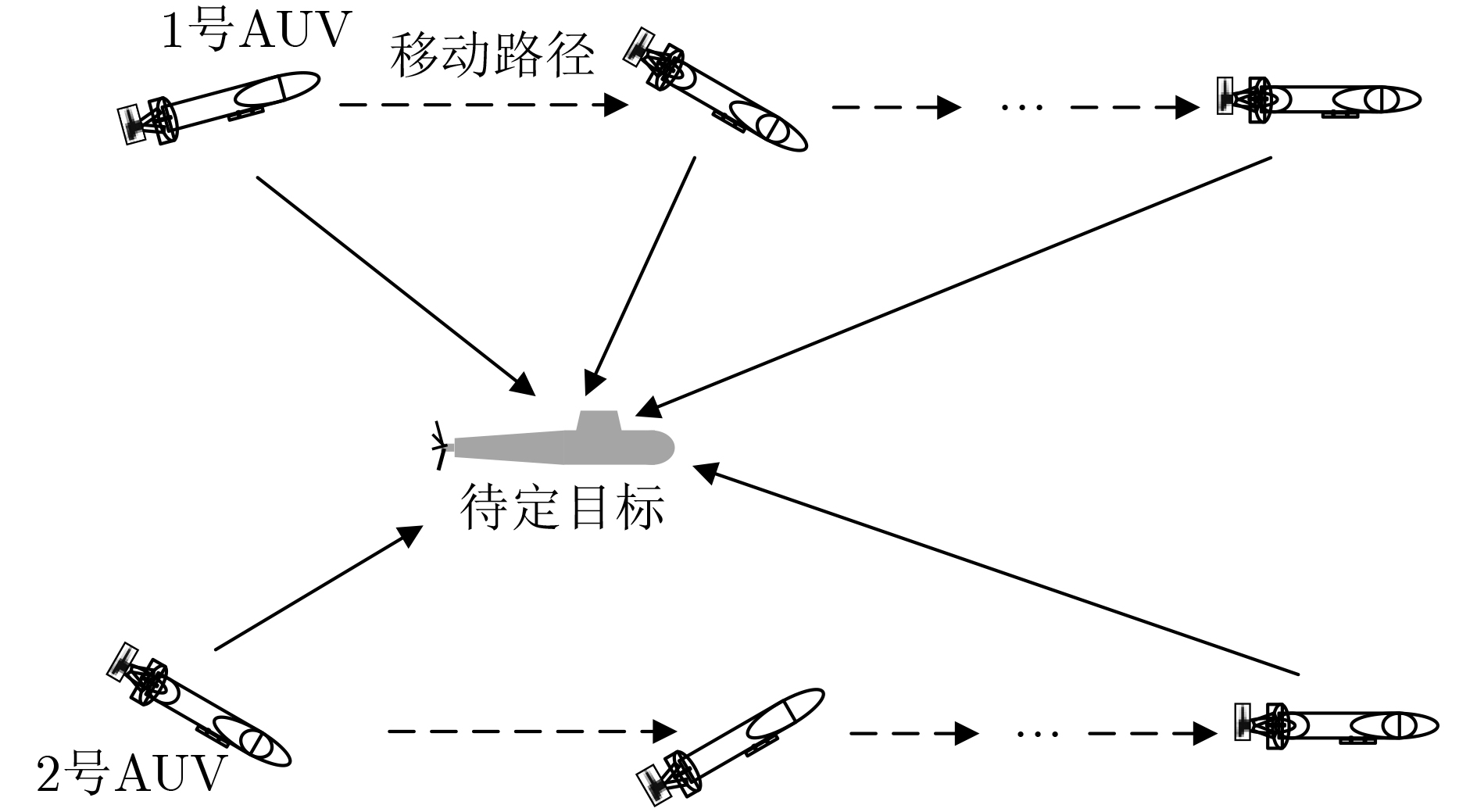
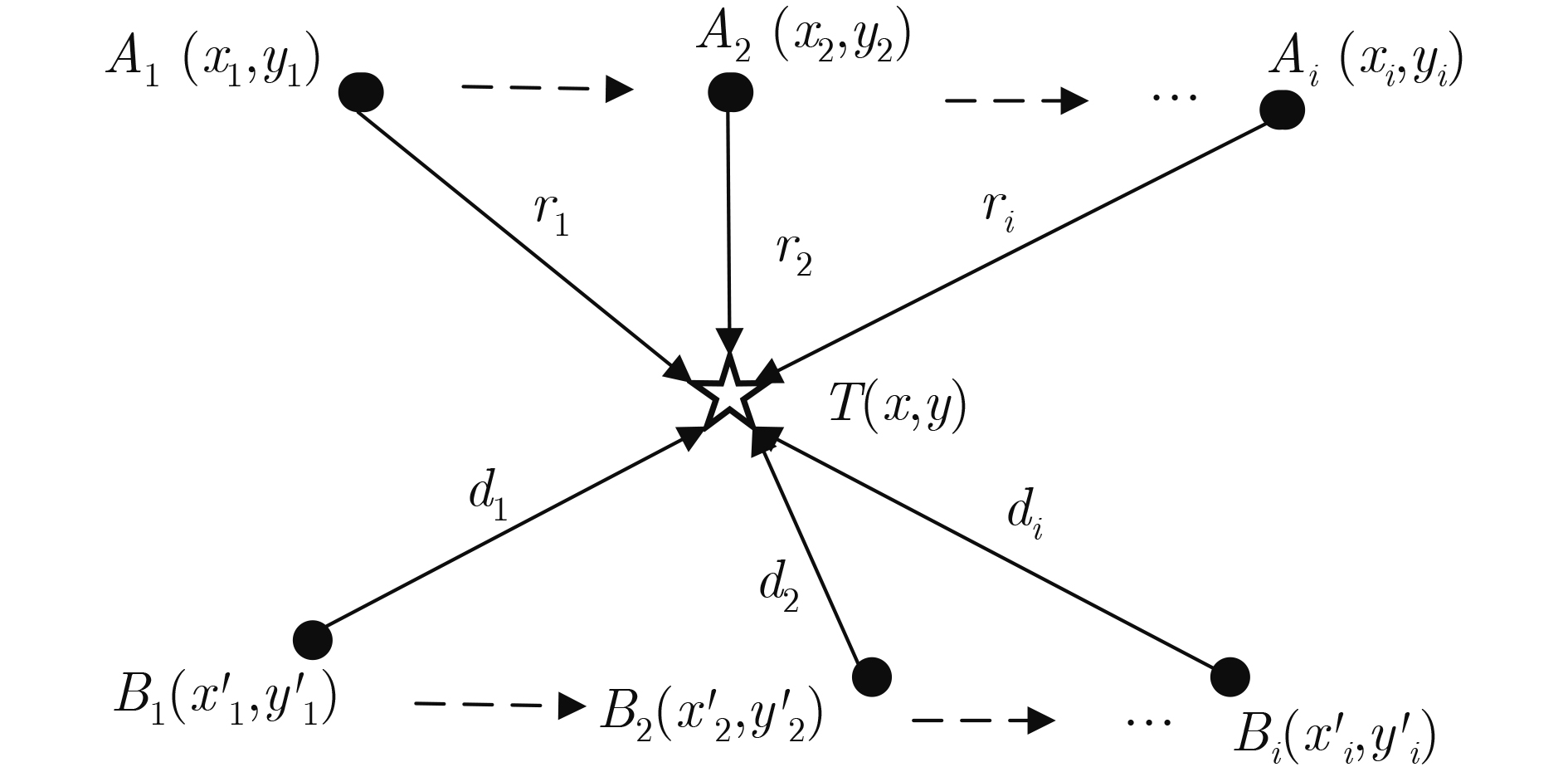
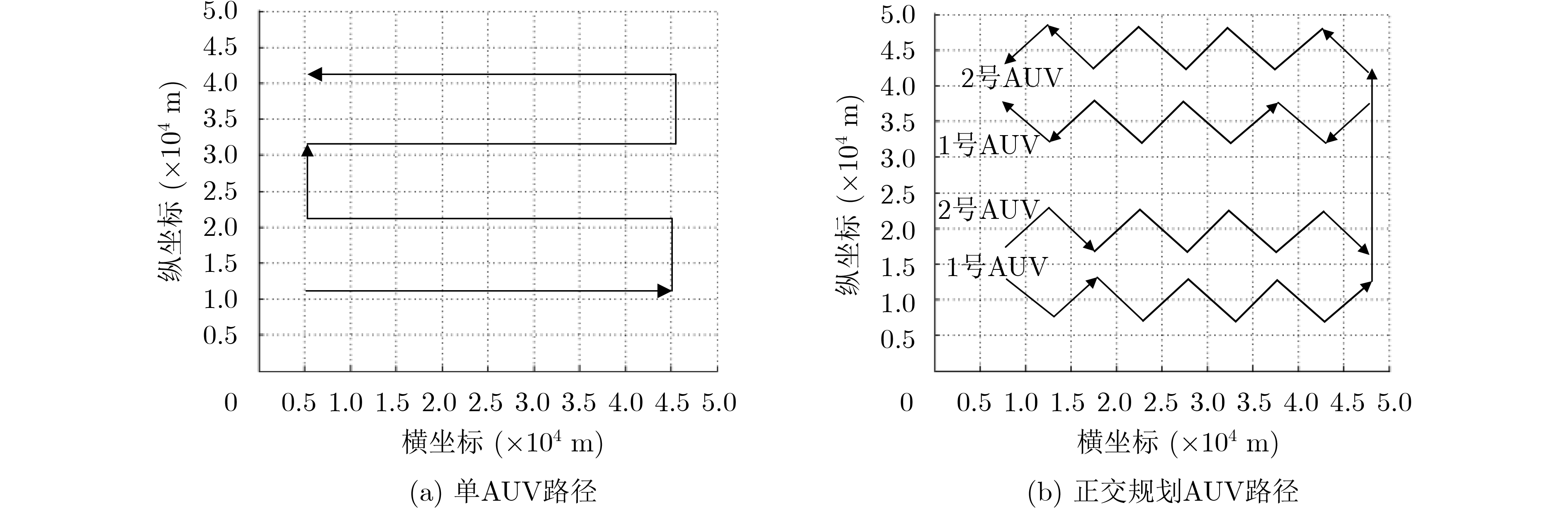
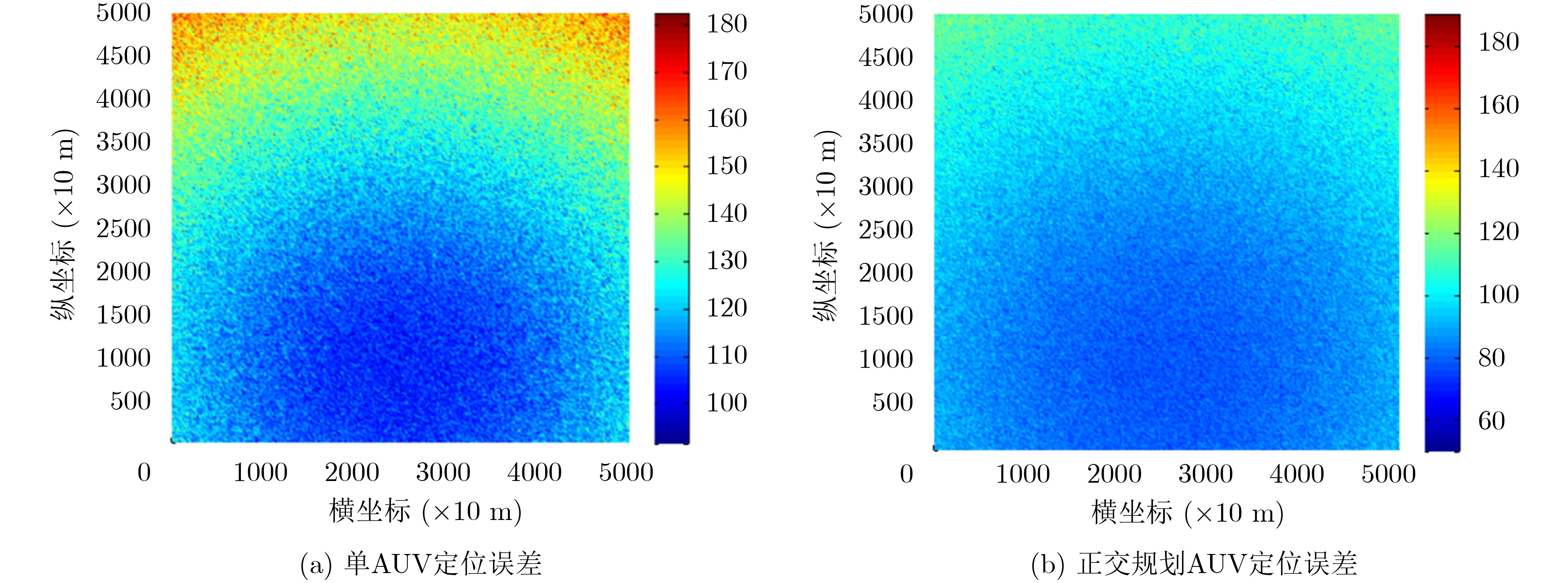
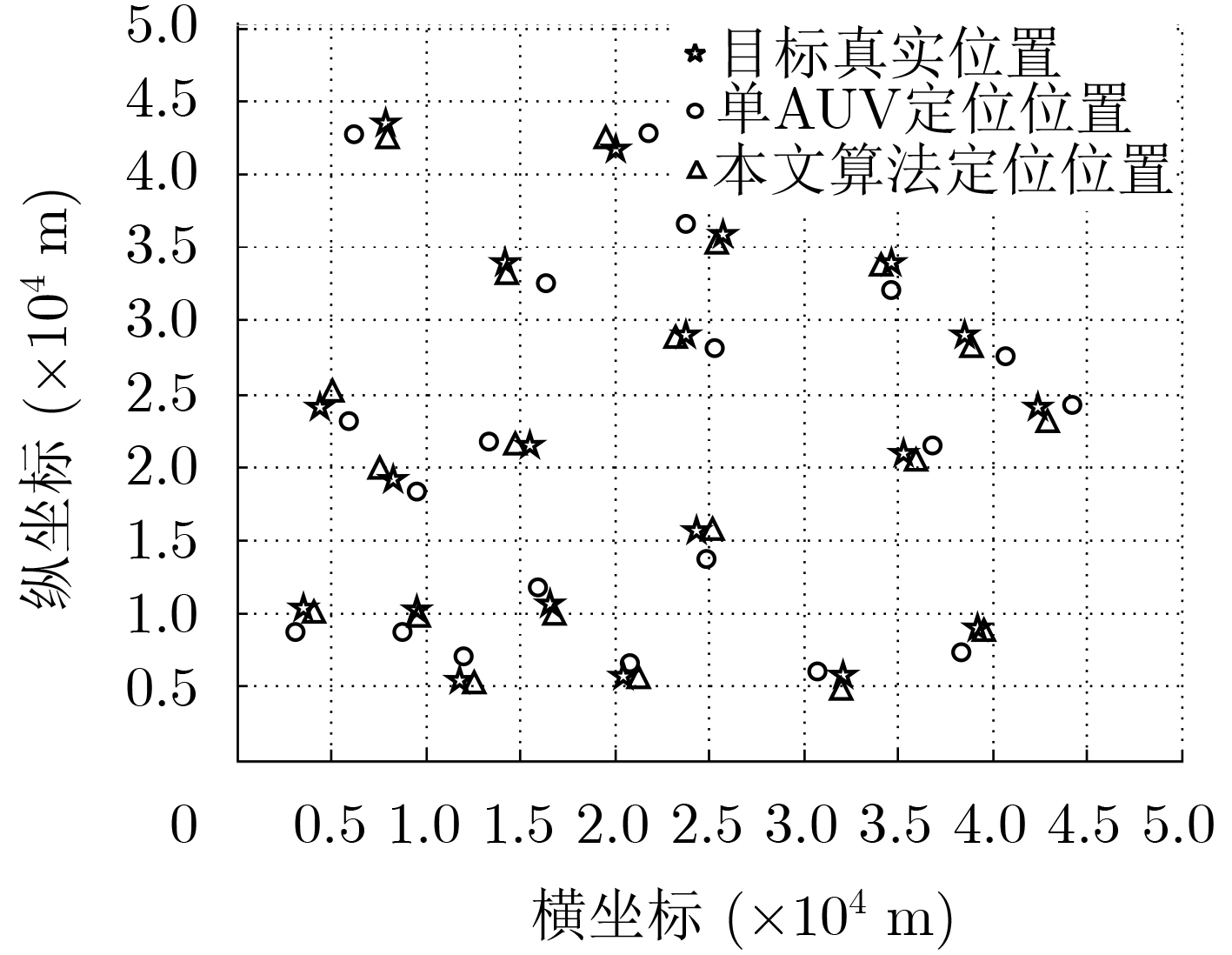
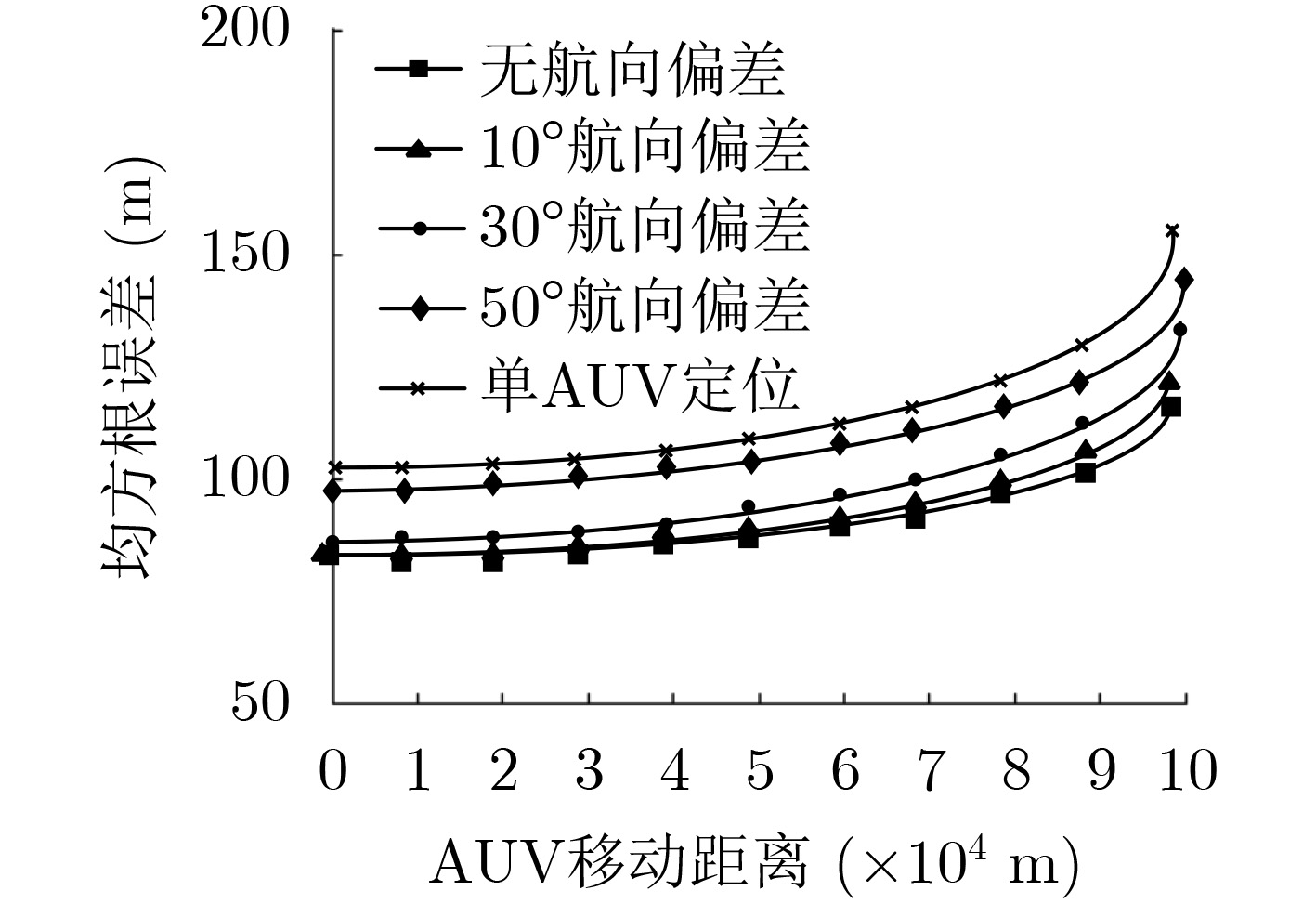
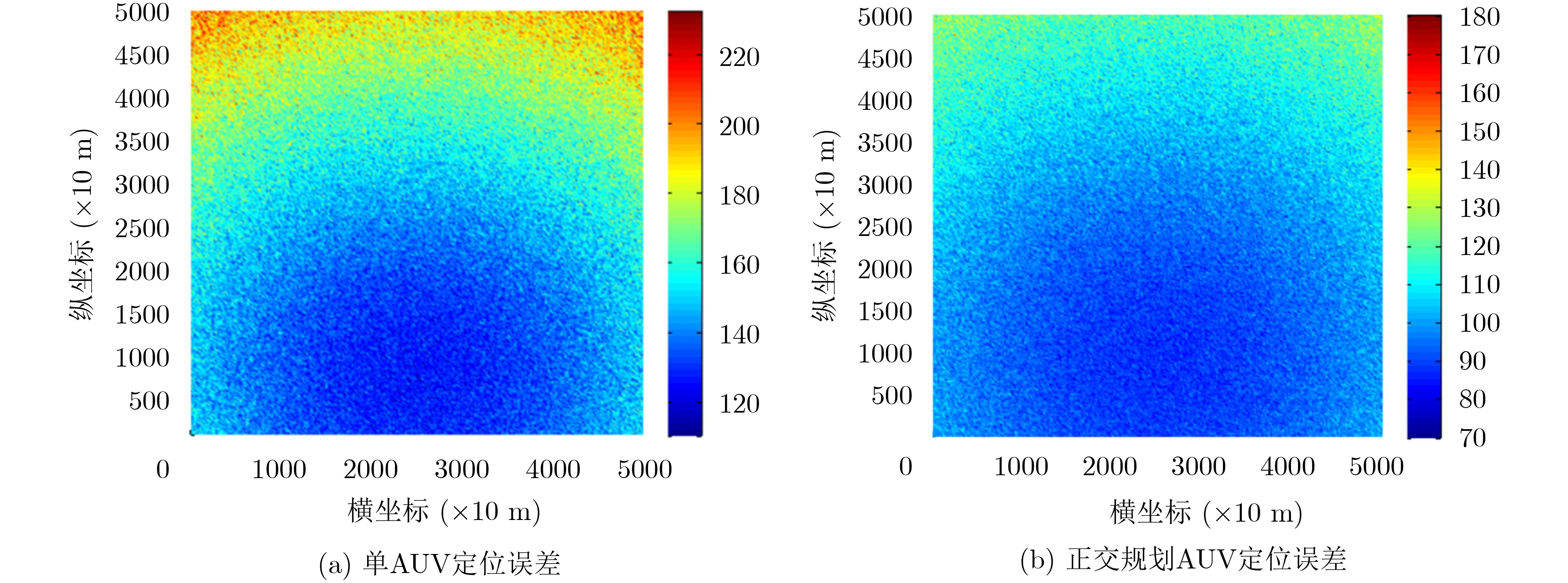
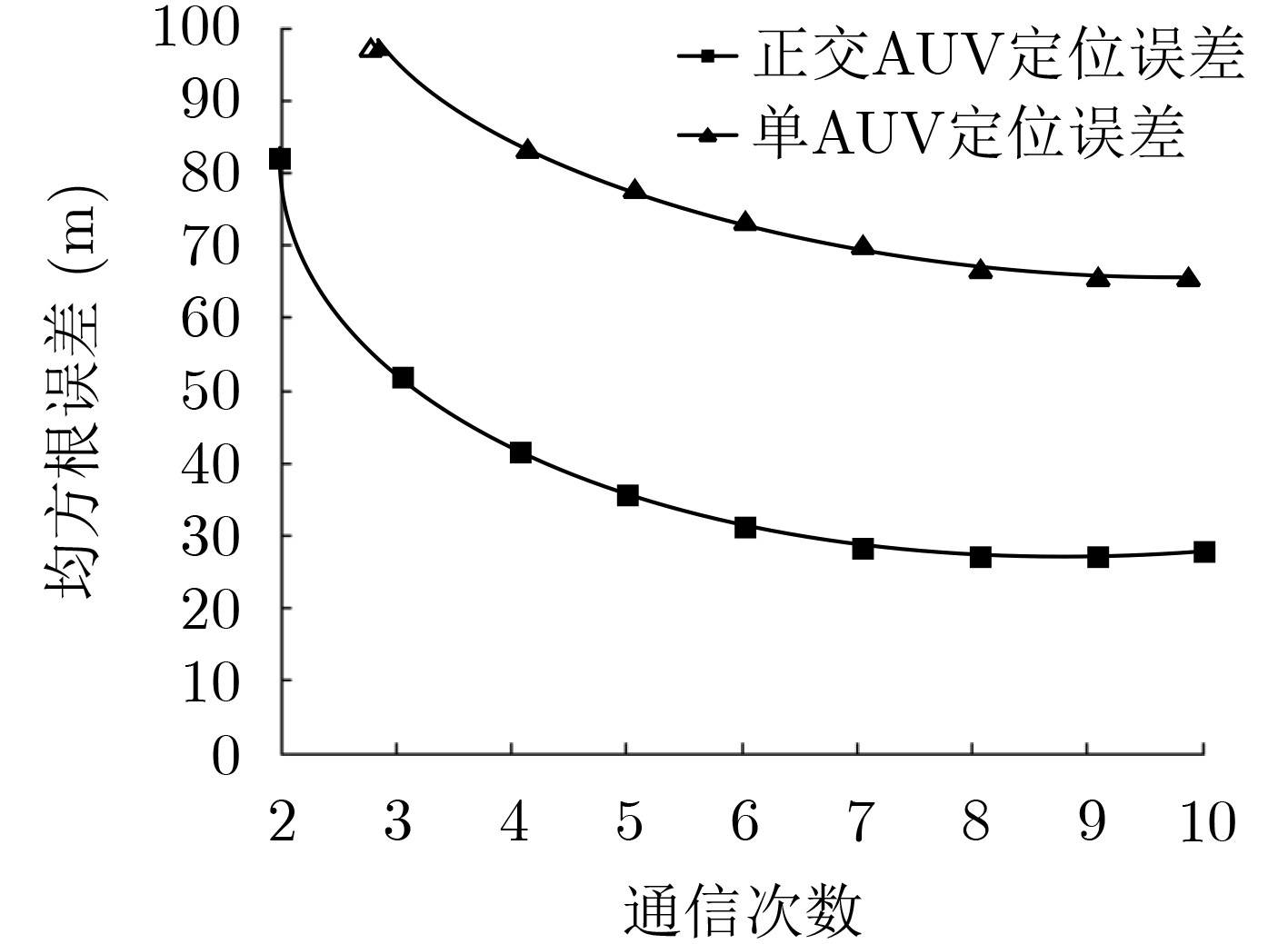
摘要: 利用水下自主潜航器(AUV)定位是水下大区域静止目标定位主要方法之一。针对单AUV定位存在的定位周期长,定位覆盖区域低,长时间定位误差累积大的缺陷,该文提出一种基于正交运动的双AUV的静止目标定位方法。每个AUV通过自身携带的惯性导航系统(INS)和多普勒计程仪进行自身定位,并在多次运动过程中通过与静止目标间的通信时延差测量进行定位。该方法需要2个相对航向角呈90°的正交移动AUV通过最少2次与静止目标间通信完成次定位。相比于传统的单移动传感器定位方法,该算法需要的定位周期更短,对同步要求更低。实验结果表明,该方法定位精度有显著提高,同时有效定位区域增大,在长时间定位过程中对AUV位置误差影响更低。
-
关键词:
- 水声定位 /
- 水声通信 /
- 水声传感器网络 /
- 水下自主潜航器导航定位
Abstract: Autonomous Underwater Vehicle (AUV) localization is one of the main methods to locate underwater targets in large areas. Considering the defects of single AUV positioning, such as long positioning period, low positioning coverage area and large accumulation of positioning errors for a long time, a cooperative target localization method based on double orthogonal moving AUVs is proposed. Each AUV locates itself through its own Inertial Navigation System (INS) and Doppler log. Localization process is achieved through the measurement of time difference of arrive between the target and AUV in the course of multiple movements. This method requires two orthogonal moving AUVs with a relative heading angle of 90°to achieve one positioning process by communicating at least two times. Compared with the traditional single mobile sensor positioning method, the proposed method requires shorter positioning period and lower synchronization requirements. Experimental results show that the positioning accuracy of this method is significantly improved, while the effective positioning area is enlarged, and the influence on AUV position error is lower in the long time positioning process. -
韩云峰, 李昭, 郑翠娥, 等. 一种基于长基线交汇的超短基线定位系统精度评价方法[J]. 物理学报, 2015, 64(9): 094301. doi: 10.7498/aps.64.094301HAN Yunfeng, LI Zhao, ZHENG Cuie, et al. A precision evaluation method of USBL positioning systems based on LBL triangulation[J]. Acta Physica Sinica, 2015, 64(9): 094301. doi: 10.7498/aps.64.094301 王燕, 李晴, 付进, 等. 超短基线定位系统融合分类解模糊技术研究[J]. 电子与信息学报, 2017, 39(6): 1348–1354. doi: 10.11999/JEIT160825WANG Yan, LI Qing, FU Jin, et al. Resolving ambiguity using fusion classification for ultra-short baseline positioning systems[J]. Journal of Electronics &Information Technology, 2017, 39(6): 1348–1354. doi: 10.11999/JEIT160825 孙光才, 王裕旗, 高昭昭, 等. 一种基于短合成孔径的双星干涉精确定位方法[J]. 电子与信息学报, 2020, 42(2): 472–479. doi: 10.11999/JEIT180940SUN Guangcai, WANG Yuqi, GAO Zhaozhao, et al. A dual satellite interferometric precise localization method based on short synthetic aperture[J]. Journal of Electronics &Information Technology, 2020, 42(2): 472–479. doi: 10.11999/JEIT180940 RAMEZANI H, FAZEL F, STOJANOVIC M, et al. Collision tolerant and collision free packet scheduling for underwater acoustic localization[J]. IEEE Transactions on Wireless Communications, 2015, 14(5): 2584–2595. doi: 10.1109/TWC.2015.2389220 TAN H P, DIAMANT R, SEAH W K G, et al. A survey of techniques and challenges in underwater localization[J]. Ocean Engineering, 2011, 38(14/15): 1663–1676. LIANG Qilian, ZHANG Baoju, ZHAO Chenglin, et al. TDoA for passive localization: Underwater versus terrestrial environment[J]. IEEE Transactions on Parallel and Distributed Systems, 2013, 24(10): 2100–2108. doi: 10.1109/TPDS.2012.310 HUANG Huai and ZHENG Y R. Node localization with AoA assistance in multi-hop underwater sensor networks[J]. Ad Hoc Networks, 2018, 78: 32–41. doi: 10.1016/j.adhoc.2018.05.005 GONG Zijun, LI Cheng, JIANG Fan, et al. AUV-aided localization of underwater acoustic devices based on Doppler shift measurements[J]. IEEE Transactions on Wireless Communications, 2020, 19(4): 2226–2239. doi: 10.1109/TWC.2019.2963296 徐复, 惠俊英, 时洁, 等. 多途条件下聚焦波束近程定位[J]. 声学技术, 2007, 26(6): 1101–1107. doi: 10.3969/j.issn.1000-3630.2007.06.007XU Fu, HUI Junying, SHI Jie, et al. Focusing beamform location in multipath channel[J]. Technical Acoustics, 2007, 26(6): 1101–1107. doi: 10.3969/j.issn.1000-3630.2007.06.007 孙文舟, 殷晓冬, 李树军, 等. 用于AUV定位的等效声速剖面改进算法研究[J]. 海洋测绘, 2017, 37(3): 40–44. doi: 10.3969/j.issn.1671-3044.2017.03.009SUN Wenzhou, YIN Xiaodong, LI Shujun et al. AUV positioning based on equivalent sound speed profile improved algorithm[J]. Hydrographic Surveying and Charting, 2017, 37(3): 40–44. doi: 10.3969/j.issn.1671-3044.2017.03.009 周伟, 门丽杰, 梅继丹, 等. 浅海三元阵近程被动定位实验研究[J]. 哈尔滨工程大学学报, 2009, 30(5): 547–551. doi: 10.3969/j.issn.1006-7043.2009.05.015ZHOU Wei, MEN Lijie, MEI Jidan, et al. Experimental research on passive near field ranging of a three-sensor array in shallow water[J]. Journal of Harbin Engineering University, 2009, 30(5): 547–551. doi: 10.3969/j.issn.1006-7043.2009.05.015 QIAO Gang, ZHAO Chen, ZHOU Feng, et al. Distributed localization based on signal propagation loss for underwater sensor networks[J]. IEEE Access, 2019, 7: 112985–112995. doi: 10.1109/ACCESS.2019.2934978 MAKI T, MIZUSHIMA H, URA T, et al. AUV navigation around jacket structures I: Relative localization based on multi-sensor fusion[J]. Journal of Marine Science and Technology, 2012, 17(3): 330–339. doi: 10.1007/s00773-012-0165-2 DIAMANT R and LAMPE L. Underwater localization with time-synchronization and propagation speed uncertainties[J]. IEEE Transactions on Mobile Computing, 2013, 12(7): 1257–1269. doi: 10.1109/TMC.2012.100 CAO Jun, HAN Yunfeng, ZANG Dianlun, et al. Linearized iterative method for determining effects of vessel attitude error on single-beacon localization[J]. Applied Acoustics, 2017, 116: 297–302. doi: 10.1016/j.apacoust.2016.10.001 曹俊. 基于单信标测距的水下载体定位研究[D]. [博士论文], 哈尔滨工程大学, 2017.CAO Jun. Research on the positioning of underwater carrier based on single beacon ranging[D]. [Ph. D. dissertation], Harbin Engineering University, 2017. ZHENG Cuie, SUN Dajun, CAI Lin, et al. Mobile node localization in underwater wireless networks[J]. IEEE Access, 2018, 6: 17232–17244. doi: 10.1109/ACCESS.2018.2795600 YUN X, BACHMANN E R, MCGHEE R B, et al. Testing and evaluation of an integrated GPS/INS system for small AUV navigation[J]. IEEE Journal of Oceanic Engineering, 1999, 24(3): 396–404. doi: 10.1109/48.775301 安良, 陈励军, 陆佶人, 等. 船载柔性阵基元坐标实时获取技术研究[J]. 数据采集与处理, 2010, 25(1): 86–92. doi: 10.3969/j.issn.1004-9037.2010.01.017AN Liang, CHEN Lijun, LU Jiren, et al. Element coordinate measurement of ship-based flexible hydrophone array[J]. Journal of Data Acquisition &Processing, 2010, 25(1): 86–92. doi: 10.3969/j.issn.1004-9037.2010.01.017 刘若辰, 王英民, 甘甜. 基于线性最小二乘方法的多基地声呐定位算法[J]. 电声技术, 2011, 35(6): 56–60. doi: 10.3969/j.issn.1002-8684.2011.06.014LIU Ruochen, WANG Yingmin, and GAN Tian. Space location algorithm for multistatic sonar based on linear least squares method[J]. Audio Engineering, 2011, 35(6): 56–60. doi: 10.3969/j.issn.1002-8684.2011.06.014 李涛, 屈也频, 梅风华. 基于总体最小二乘的多基地声纳系统定位算法[J]. 探测与控制学报, 2015, 37(3): 82–85.LI Tao, QU Yepin, and MEI Fenghua. Multistatic sonar space location algorithm based on total least squares method[J]. Journal of Detection &Control, 2015, 37(3): 82–85. -

 下载:
下载:




图(12)
计量
- 文章访问数: 1163
- HTML全文浏览量: 577
- PDF下载量: 91
- 被引次数: 0
