

Characteristics Analysis and Contrast between Scalar Accumulation and Vector Accumulation in Interferometer Phase Difference Measurement
-
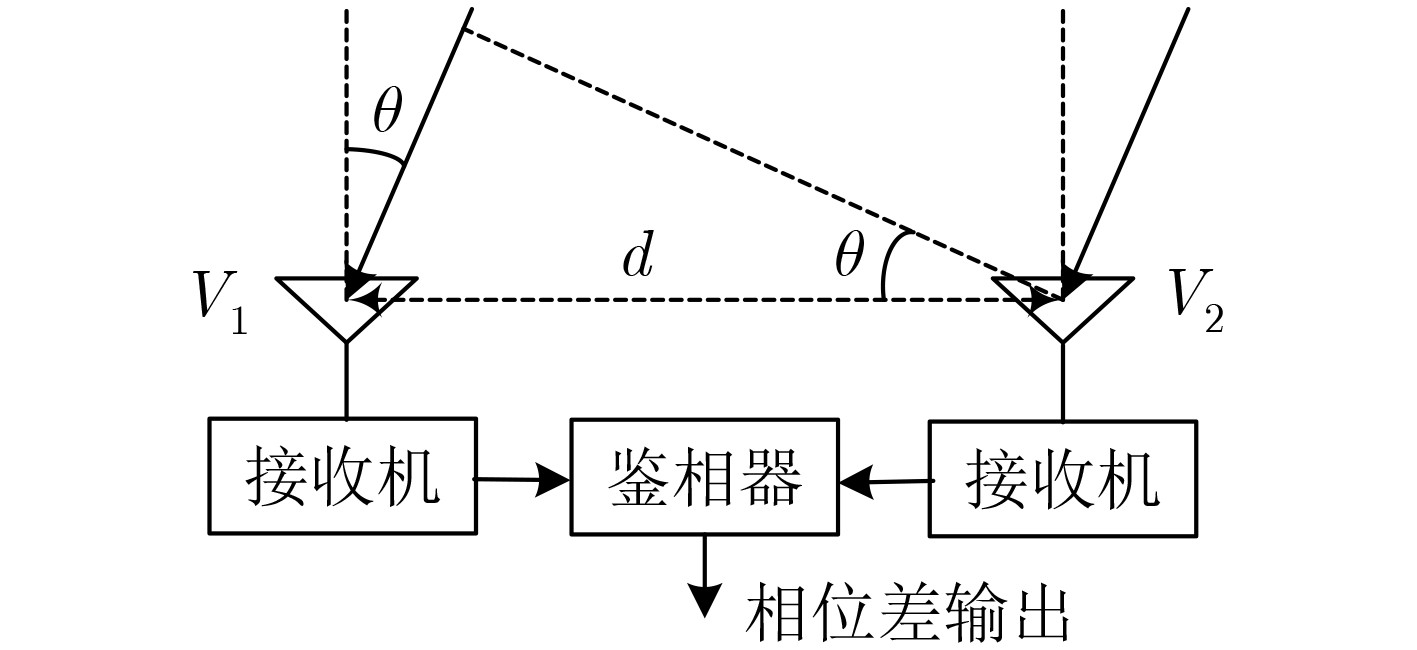
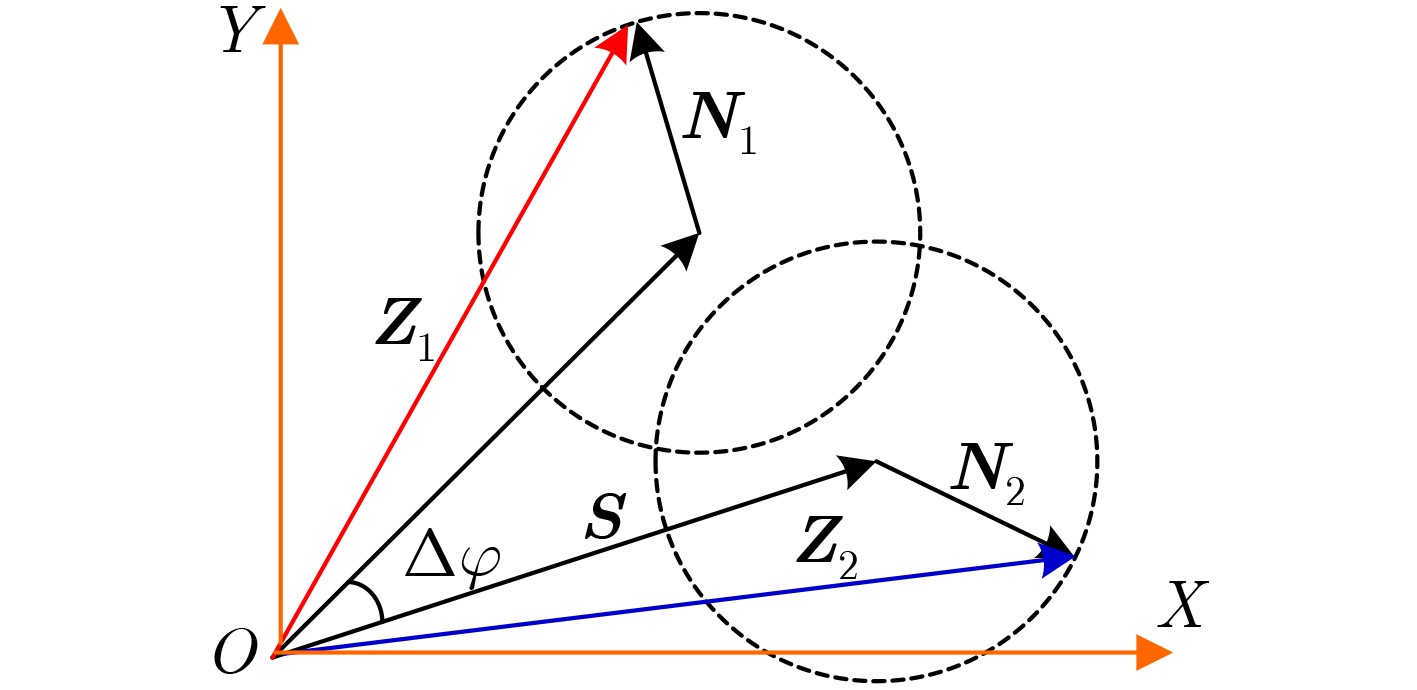
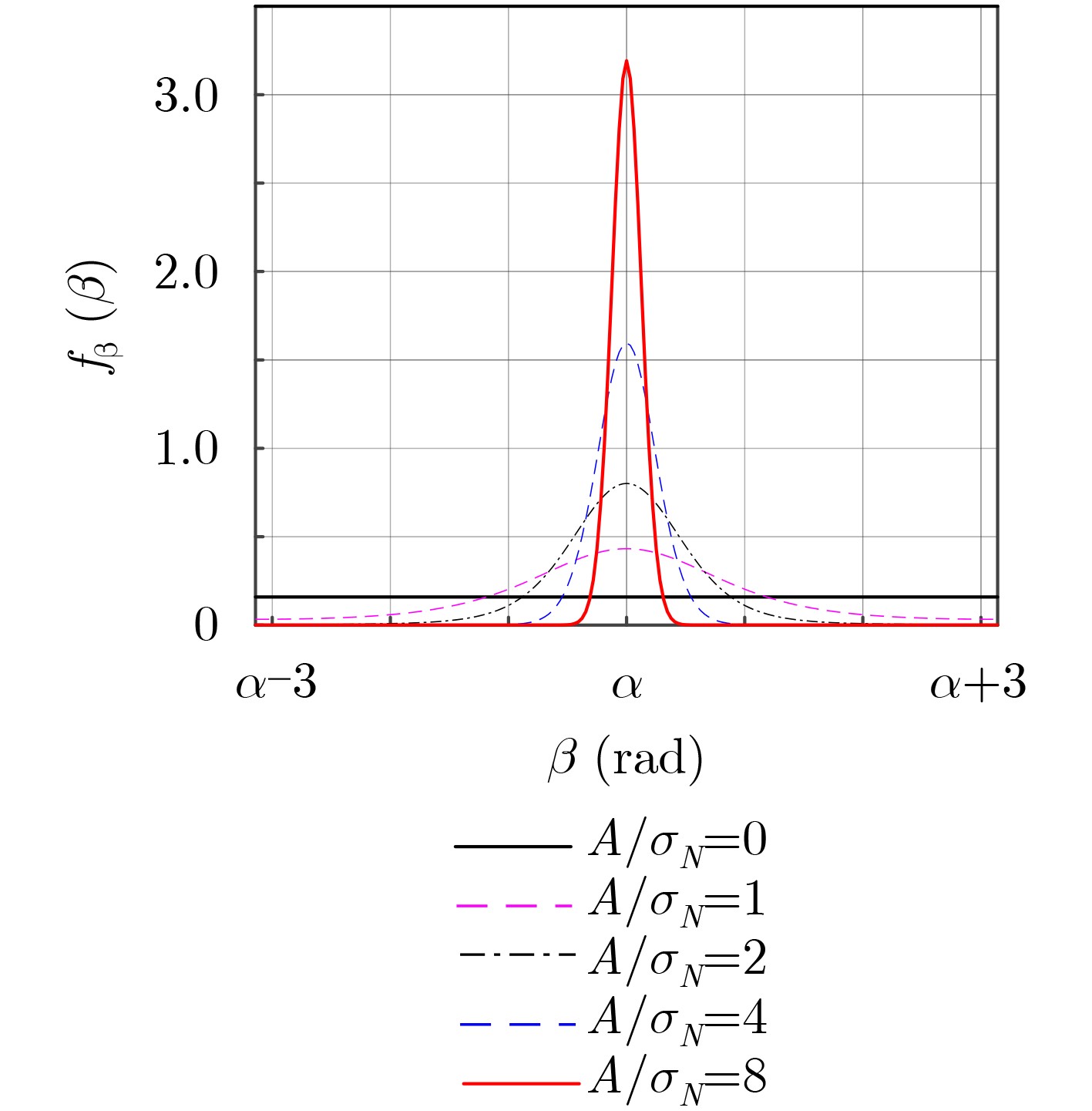
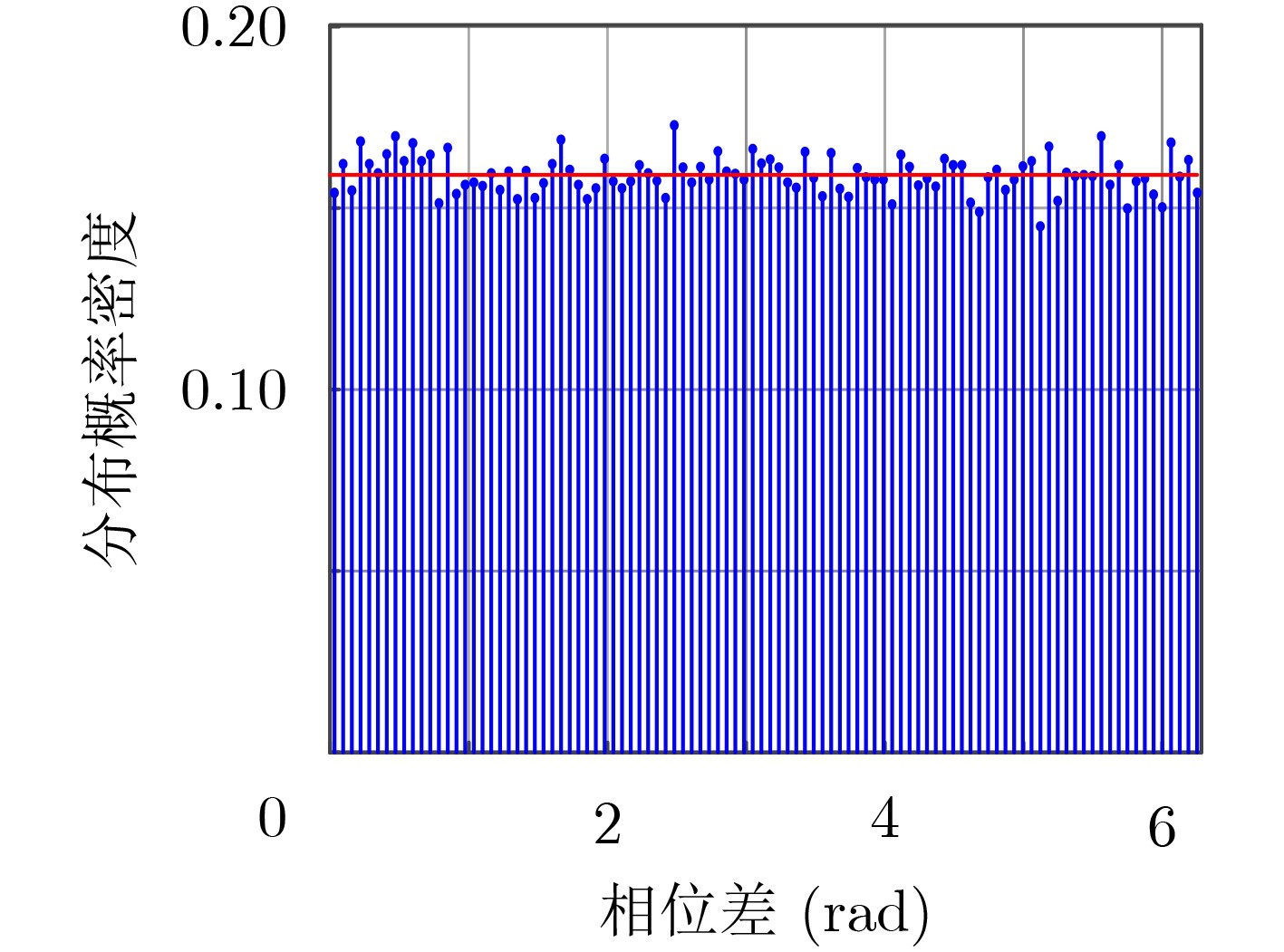
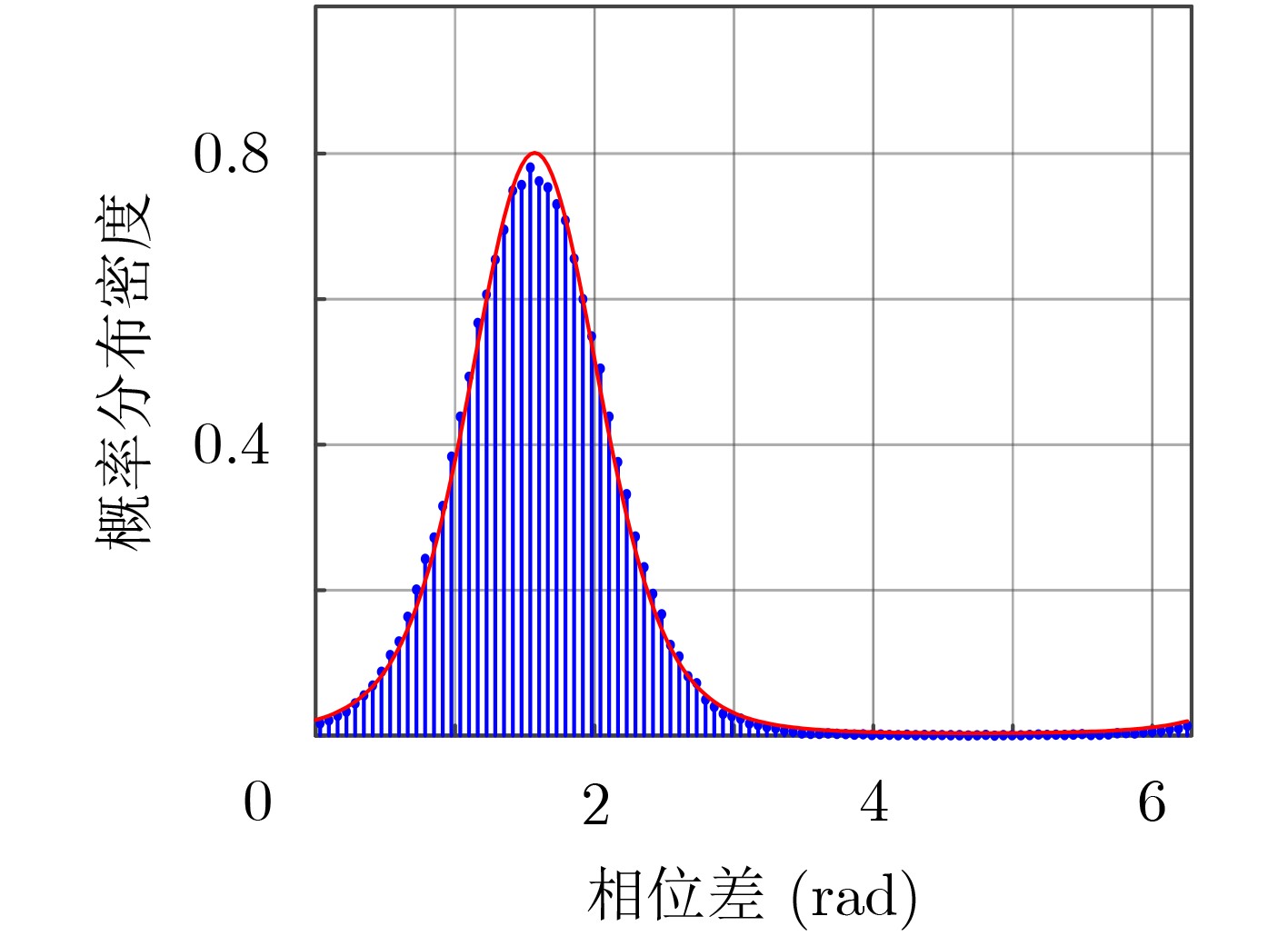
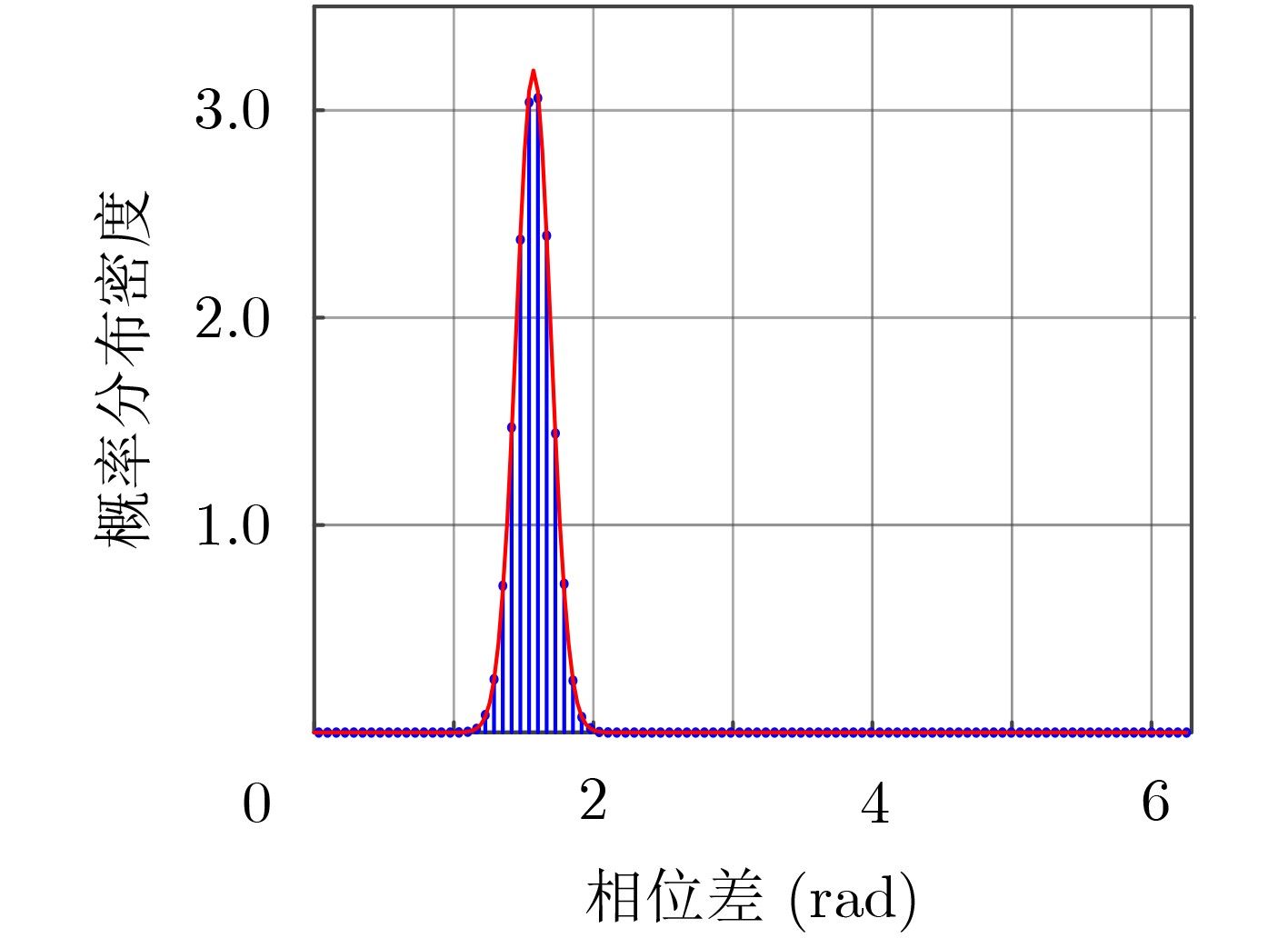
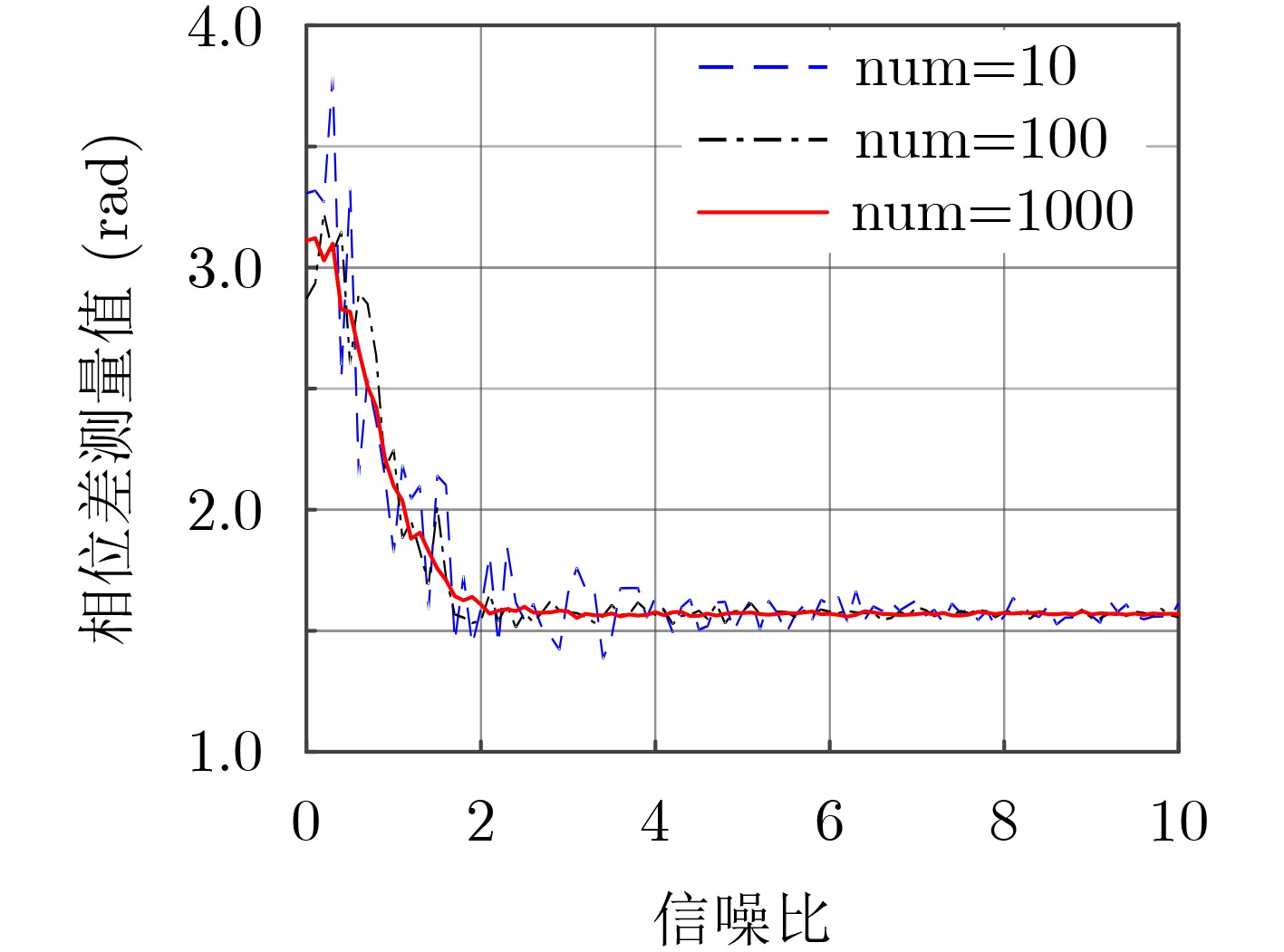
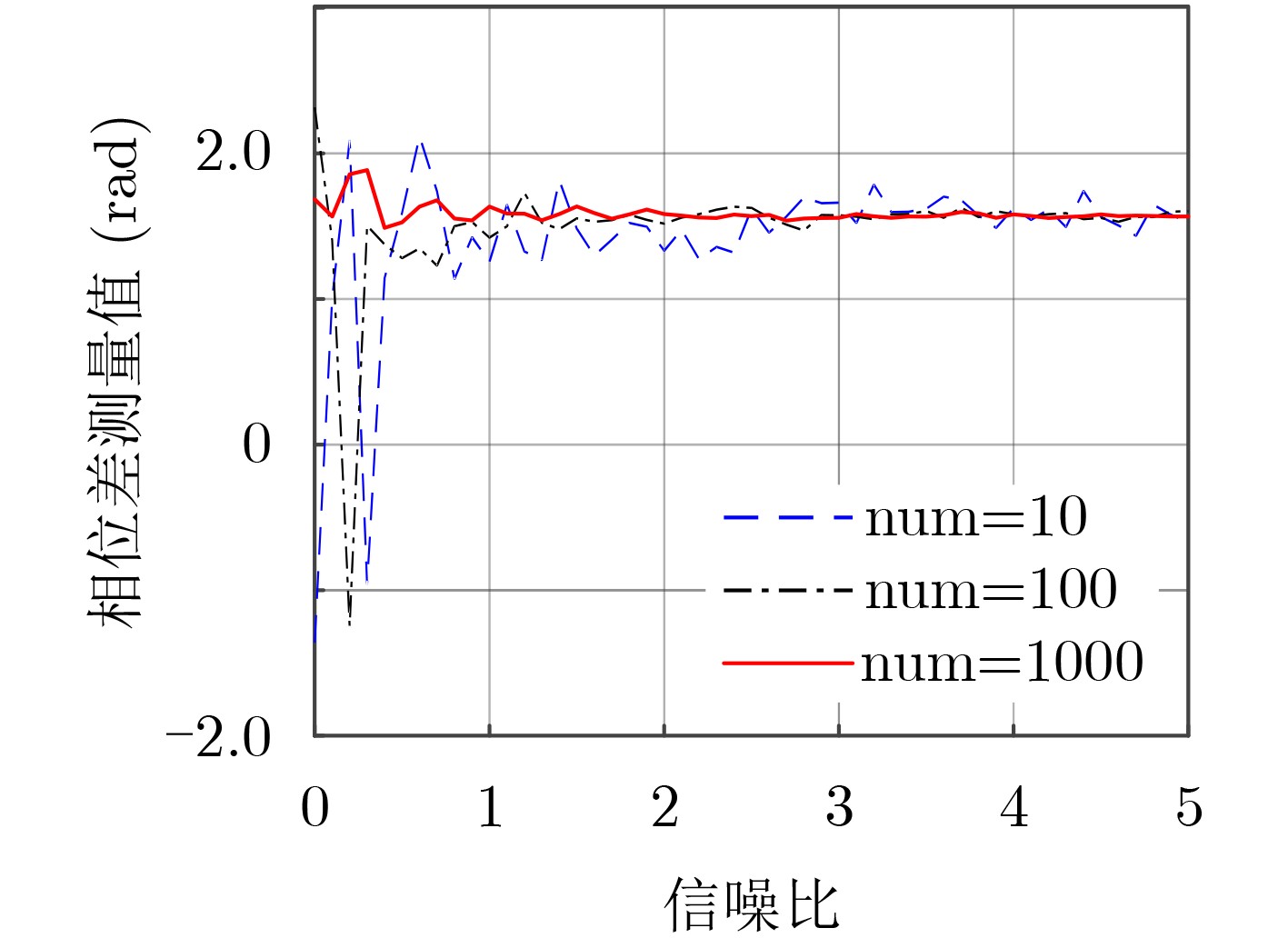
摘要: 通过对干涉仪通道间信号相位差的多次测量求平均来减小测量误差是工程上提高干涉仪测向精度的重要途径之一,在这一过程中有标量积累与矢量积累两种方式。为了分析这两种积累方式的特性,该文在对干涉仪测向模型与相位差形成过程简要介绍之后,基于信号矢量方法获得了相位差的统计特性,并利用推导得到的概率密度分布结果对相位差标量积累与矢量积累进行了详尽对比,不仅揭示了标量积累过程中的门限效应,而且从理论上证明了矢量积累对真实值的无限逼近过程。最后通过仿真验证了理论分析的有效性与正确性。从而为干涉仪工程应用中相位差测量数据的有效处理提供了重要的理论指导。Abstract: It is one of the important approaches to improve the direction finding accuracy of interferometer to reduce the measurement error by averaging the signal phase difference between the channels in the interferometer. In this process, there are two methods: scalar accumulation and vector accumulation. In order to analyze on these two methods, after a brief introduction to the direction finding model of interferometer and the formation process of phase difference, the statistical characteristics of phase difference are deduced by using the signal vector method. Then a detailed contrast between scalar accumulation and vector accumulation of phase difference is made by using the probability distribution results derived. This not only reveals the threshold effect in scalar accumulation, but also the infinite approximation process of vector accumulation to the real value is theoretically proved. Finally, the validity and correctness of the theoretical analysis are verified by simulations. It provides an important theoretical guidance on the data processing of interferometer phase difference measurement for engineering application.
-
[1] IQBAL M F, KHALID Z, ZAHID M, et al. Accuracy improvement in amplitude comparison-based passive direction finding systems by adaptive squint selection[J]. IET Radar, Sonar & Navigation, 2020, 14(5): 662–668. doi: 10.1049/iet-rsn.2019.0465 [2] LEE J H, JO J I, RYU H K, et al. Approximate analysis of DF ambiguity probabilities for an interferometer direction-finding system using gamma distributions[J]. Electronics Letters, 2019, 55(25): 1320–1322. doi: 10.1049/el.2019.2274 [3] GÜREL A E, ORDUYILMAZ A, SERIN M, et al. Real time ambiguity resolution in hybrid amplitude/phase comparison direction finding systems[C]. The 26th Signal Processing and Communications Applications Conference, Izmir, Turkey, 2018: 1–4. [4] LOPEZ D G, AL-TARIFI M A, LASSER G, et al. Wideband antenna systems for millimeter-wave amplitude-only direction finding[J]. IEEE Transactions on Antennas and Propagation, 2018, 66(6): 3122–3129. doi: 10.1109/TAP.2018.2823779 [5] QU X, XU X, WANG S, et al. Direction finding for radio transmitters with mini interferometric network[J]. Radio Science, 2018, 53(10): 1218–1224. doi: 10.1029/2018RS006598 [6] LEE J H and WOO J M. Interferometer direction-finding system with improved DF accuracy using two different array configurations[J]. IEEE Antennas and Wireless Propagation Letters, 2015, 14: 719–722. doi: 10.1109/LAWP.2014.2377291 [7] SKINNER S, PATEL K, PITTMAN J, et al. Direction finding system using an N-channel software defined radio implemented with a phase interferometry algorithm[C]. 2019 SoutheastCon, Huntsville, USA, 2019: 1–5. doi: 10.1109/SoutheastCon42311.2019.9020650. [8] HUANG Lei, ZHANG Renli, SHENG Weixing, et al. Multi-target detection for FMCW radar based on interferometer direction finding[C]. 2019 International Applied Computational Electromagnetics Society Symposium, Nanjing, China, 2019: 1–2. [9] LEE J H, LEE J H, and WOO J M. Method for obtaining three- and four-element array spacing for interferometer direction-finding system[J]. IEEE Antennas and Wireless Propagation Letters, 2016, 15: 897–900. doi: 10.1109/LAWP.2015.2479224 [10] 辛金龙, 廖桂生, 杨志伟, 等. 基于旋转干涉仪圆阵化的多目标参数估计新算法[J]. 电子与信息学报, 2018, 40(2): 486–492. doi: 10.11999/JEIT170217XIN Jinlong, LIAO Guisheng, YANG Zhiwei, et al. Multiple source parameter estimation for rotating interferometer using circular array processing[J]. Journal of Electronics &Information Technology, 2018, 40(2): 486–492. doi: 10.11999/JEIT170217 [11] 石荣, 邓科, 阎剑. 普遍意义下的干涉仪通道间相位差测量精度分析[J]. 现代电子技术, 2014, 37(7): 59–63. doi: 10.16652/j.issn.1004-373x.2014.07.005SHI Rong, DENG Ke, and YAN Jian. Analysis on measurement accuracy of phase difference between interferometer channels in generalized condition[J]. Modern Electronics Technique, 2014, 37(7): 59–63. doi: 10.16652/j.issn.1004-373x.2014.07.005 [12] WANG Sichun, INKOL R, RAJAN S, et al. An exact formula for the probability density of the phase error of a digital interferometer[C]. The 25th Biennial Symposium on Communications, Kingston, Canada, 2010: 201–204. doi: 10.1109/BSC.2010.5472920. [13] 何冠良, 张娟, 张玉喜. 数字式干涉仪高精度鉴相技术[J]. 雷达与对抗, 2015, 35(4): 43–45. doi: 10.19341/j.cnki.issn.1009-0401.2015.04.012HE Guanliang, ZHANG Juan, and ZHANG Yuxi. High-precision phase discrimination technology for digital interferometer[J]. Radar &ECM, 2015, 35(4): 43–45. doi: 10.19341/j.cnki.issn.1009-0401.2015.04.012 [14] 张智锋, 乔强. 低信噪比下相关干涉仪测向处理方法[J]. 舰船电子对抗, 2009, 32(6): 103–106. doi: 10.16426/j.cnki.jcdzdk.2009.06.007ZHANG Zhifeng and QIAO Qiang. Direction-finding processing method of correlation interferometer under low SNR[J]. Shipboard Electronic Countermeasure, 2009, 32(6): 103–106. doi: 10.16426/j.cnki.jcdzdk.2009.06.007 [15] 郭东亮, 黄超, 李中华, 等. 基于信噪比估计和矢量平均的干涉仪抗噪声测向方法[J]. 数据采集与处理, 2016, 31(2): 289–295. doi: 10.16337/j.1004-9037.2016.02.008GUO Dongliang, HUANG Chao, LI Zhonghua, et al. Noise-robust interferometer direction finding method based on SNR estimation and vector averaging[J]. Journal of Data Acquisition and Processing, 2016, 31(2): 289–295. doi: 10.16337/j.1004-9037.2016.02.008 [16] 潘晓霞, 杨伟程, 杨杰. 矢量叠加算法在相关干涉仪测向中的应用[J]. 舰船电子对抗, 2015, 38(2): 63–66, 71. doi: 10.16426/j.cnki.jcdzdk.2015.02.017PAN Xiaoxia, YANG Weicheng, and YANG Jie. Application of vector accumulation algorithm to correlation interferometer DF[J]. Shipboard Electronic Countermeasure, 2015, 38(2): 63–66, 71. doi: 10.16426/j.cnki.jcdzdk.2015.02.017 [17] VAN TREES H L, BELL K L, and TIAN Zhi. Detection, Estimation, and Modulation Theory: Part I-Detection, Estimation, and Filtering Theory[M]. 2nd ed. Hoboken, USA: John Wiley & Sons, Inc., 2013. -

 下载:
下载:





图(9)
计量
- 文章访问数: 1350
- HTML全文浏览量: 943
- PDF下载量: 68
- 被引次数: 0
