

Variable Step Size Sign Diffusion Affine Projection Algorithm Based on Wilcoxon Norm under Non-Gaussian Noise
-
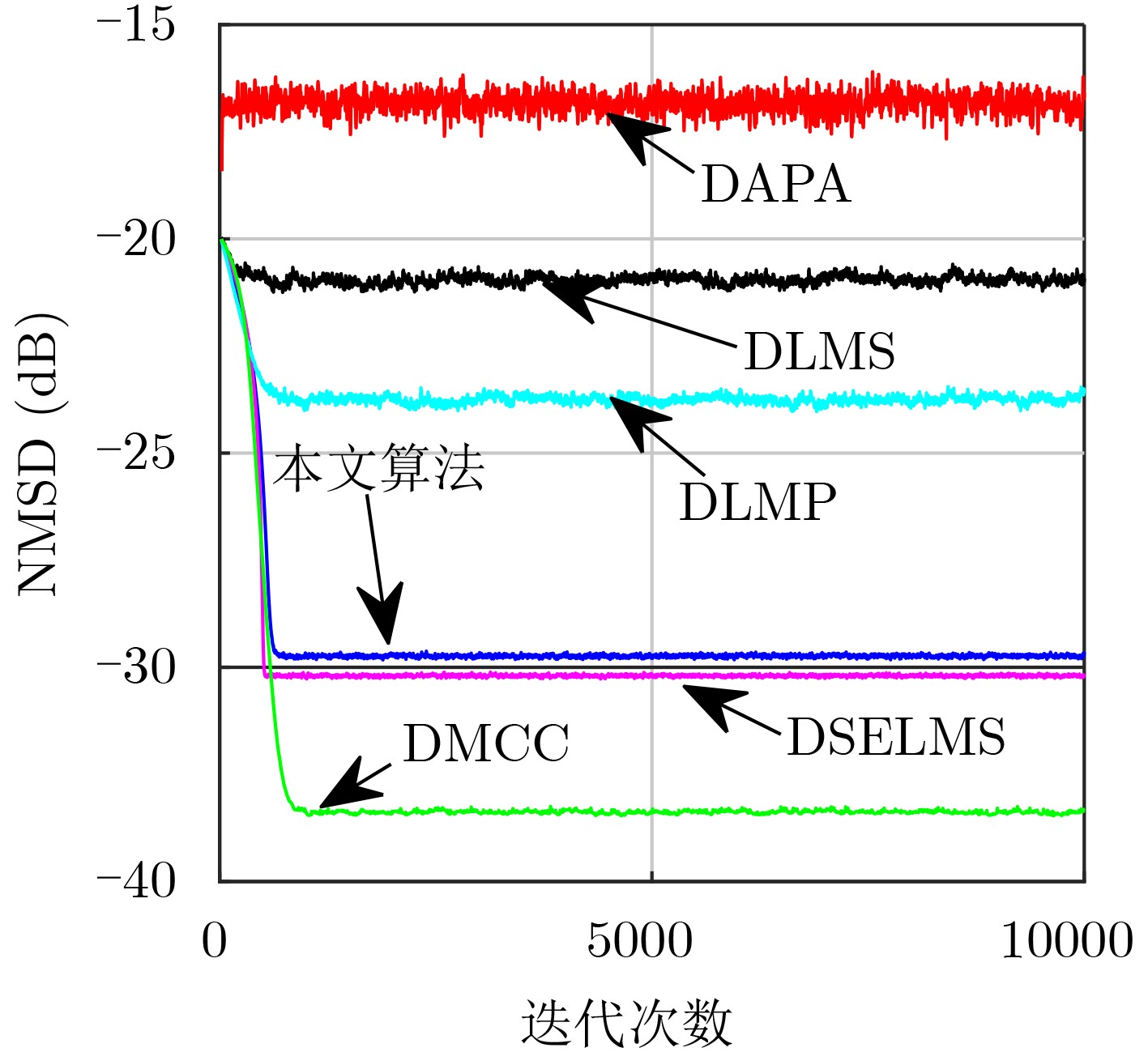
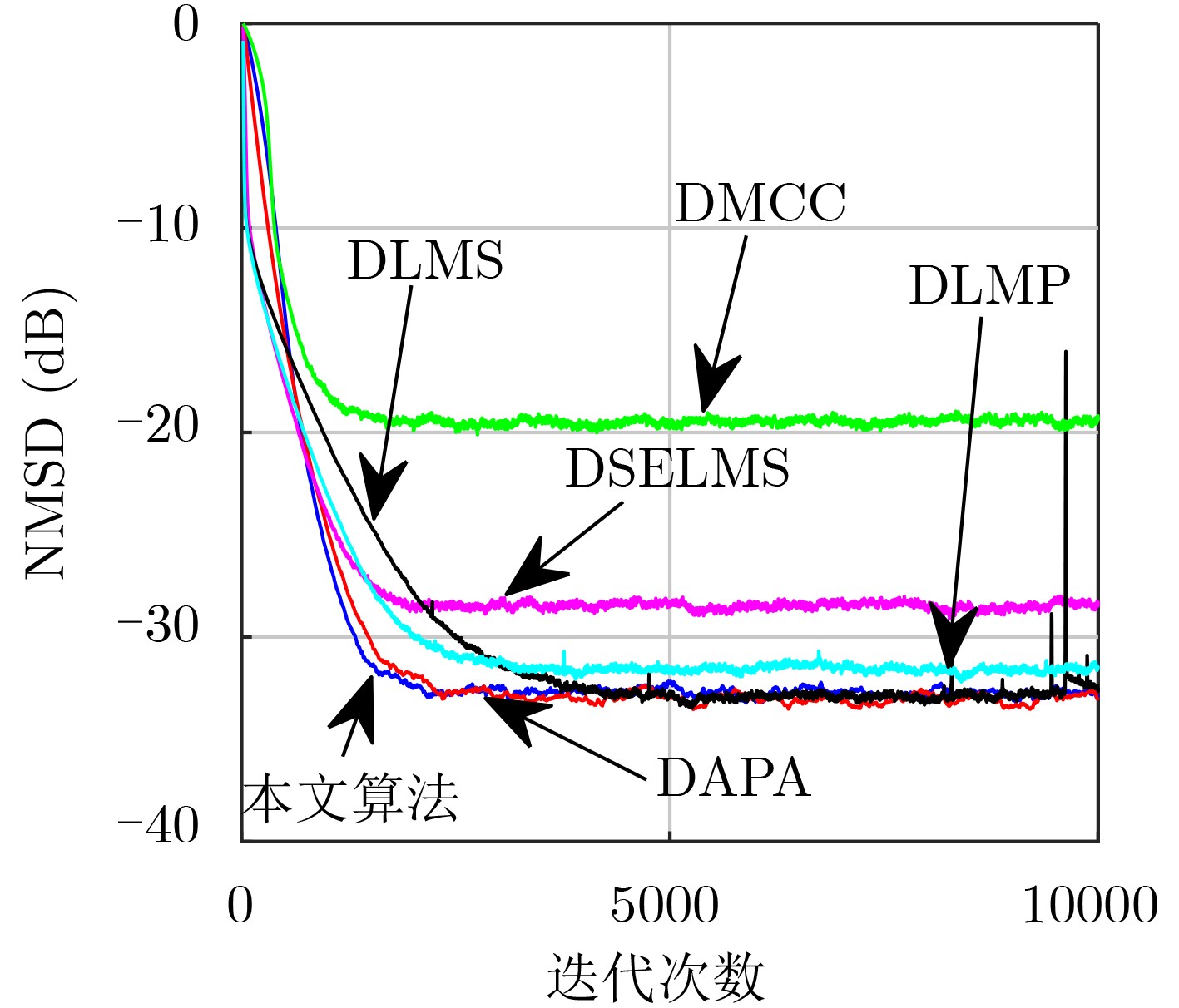
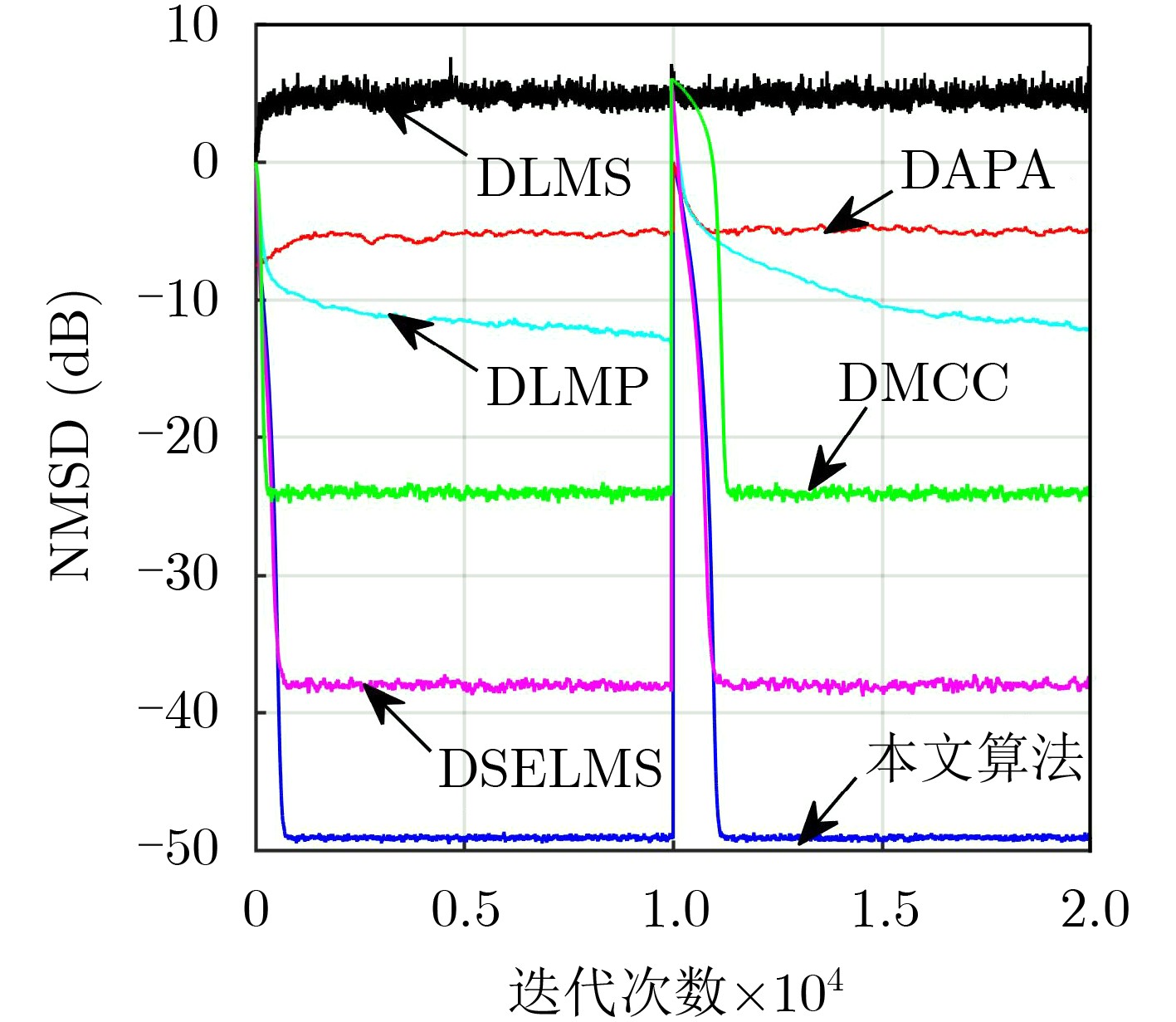
摘要: 扩散式仿射投影算法(DAPA)是实现分布式网络参数自适应估计的一种重要方法,该算法在输入信号存在相关性时仍快速收敛,但抑制具有脉冲特性的非高斯噪声能力弱,且固定步长对收敛性有所限制。为此,该文提出了基于Wilcoxon范数的变步长符号扩散式仿射投影算法(VSS-DWAPA)。首先,引入稳健估计理论中抗异常值能力强的Wilcoxon范数作为代价函数并根据其取值特点进行了符号量化,推导出了新的迭代方程;其次,针对固定步长的局限性,采用迭代方式实现了误差信号对步长的控制,在初始阶段和接近收敛阶段选择不同的步长,使算法具有更好的适应性。仿真结果表明,在非高斯噪声下本文的VSS-DWAPA算法在收敛性、跟踪性等方面均优于现有一些扩散式自适应滤波算法,同时在高斯噪声环境下也具有较好的性能。
-
关键词:
- 自适应网络 /
- 非高斯噪声 /
- Wilcoxon范数
Abstract: Diffusion Affine Projection Algorithm (DAPA) is an important method to realize the adaptive estimation of distributed network parameters. The algorithm can converge rapidly even when the input signal has correlation. The disadvantage of DAPA is that the ability to suppress non-Gaussian noise with impulsive characteristics is weak, and the fixed step size limits the performance of the algorithm. In this paper, a Variable Step size Sign Diffusion Wilcoxon Affine Projection Algorithm (VSS-DWAPA) is proposed. Firstly, the Wilcoxon norm which has strong ability to resist outliers is introduced as the cost function, and sign quantization is carried out according to its value characteristics, and then a new iterative equation is derived. Secondly, considering the limitation of fixed step size, the control of error signal to step size is realized through iterative method. That is, in the initial stage and the almost convergent stage, the step size is selected differently, which effectively makes it have better adaptation. The simulation results show that the proposed VSS-DWAPA is superior to some existing diffusion adaptive filtering algorithms in convergence, stability and tracking. It can also work well in Gaussian noise environment.-
Key words:
- Adaptive network /
- Non-Gaussian noise /
- Wilcoxon norm
-
LOPES C G and SAYED A H. Diffusion least-mean squares over adaptive networks: Formulation and performance analysis[J]. IEEE Transactions on Signal Processing, 2008, 56(7): 3122–3136. doi: 10.1109/TSP.2008.917383 TU Yuansheng and SAYED A H. Mobile adaptive networks[J]. IEEE Journal of Selected Topics in Signal Processing, 2011, 5(4): 649–664. doi: 10.1109/JSTSP.2011.2125943 GUO Ye, WU Wenchuan, ZHANG Boming, et al. A distributed state estimation method for power systems incorporating linear and nonlinear models[J]. International Journal of Electrical Power & Energy Systems, 2015, 64: 608–616. ABDELMAWGOUD A, JAMSHIDI M, and BENAVIDEZ P. Distributed estimation in multimissile cyber-physical systems with time delay[J]. IEEE Systems Journal, 2020, 14(1): 1491–1502. doi: 10.1109/JSYST.2019.2959546 CHEN Jianshu and SAYED A H. Diffusion adaptation strategies for distributed optimization and learning over networks[J]. IEEE Transactions on Signal Processing, 2012, 60(8): 4289–4305. doi: 10.1109/TSP.2012.2198470 LU Lu, ZHAO Haiquan, WANG Wenyuan, et al. Performance analysis of the robust diffusion normalized least mean p-power algorithm[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2018, 65(12): 2047–2051. doi: 10.1109/TCSII.2018.2811729 NI Jingen, CHEN Jiechen, and CHEN Xiaoping. Diffusion sign-error LMS algorithm: Formulation and stochastic behavior analysis[J]. Signal Processing, 2016, 128: 142–149. doi: 10.1016/j.sigpro.2016.03.022 LI Leilei and CHAMBERS J A. Distributed adaptive estimation based on the APA algorithm over diffusion networks with changing topology[C]. The 15th IEEE/SP Workshop on Statistical Signal Processing, Cardiff, United Kingdom, 2009: 757–760. HU Limei, CHEN Feng, DUAN Shukai, et al. An improved diffusion affine projection estimation algorithm for wireless sensor networks[J]. Circuits, Systems, and Signal Processing, 2020, 39(11): 3173–3188. 代振, 王平波, 卫红凯. 非高斯背景下基于Sigmoid函数的信号检测[J]. 电子与信息学报, 2019, 41(12): 2945–2950. doi: 10.11999/JEIT190012DAI Zhen, WANG Pingbo, and WEI Hongkai. Signal detection based on Sigmoid function in non-Gaussian noise[J]. Journal of Electronics &Information Technology, 2019, 41(12): 2945–2950. doi: 10.11999/JEIT190012 ZHANG Jiacheng, QIU Tianshuang, LUAN Shengyang, et al. Bounded non-linear covariance based esprit method for noncircular signals in presence of impulsive noise[J]. Digital Signal Processing, 2019, 87: 104–111. doi: 10.1016/j.dsp.2019.01.018 邱天爽. 相关熵与循环相关熵信号处理研究进展[J]. 电子与信息学报, 2020, 42(1): 105–118. doi: 10.11999/JEIT190646QIU Tianshuang. Development in signal processing based on correntropy and cyclic correntropy[J]. Journal of Electronics &Information Technology, 2020, 42(1): 105–118. doi: 10.11999/JEIT190646 MA Wentao, CHEN Badong, DUAN Jiandong, et al. Diffusion maximum correntropy criterion algorithms for robust distributed estimation[J]. Digital Signal Processing, 2016, 58: 10–19. doi: 10.1016/j.dsp.2016.07.009 WU Zongze, PENG Siyuan, MA Wentao, et al. Minimum error entropy algorithms with sparsity penalty constraints[J]. Entropy, 2015, 17(5): 3419–3437. doi: 10.3390/e17053419 SONG Pucha, ZHAO Haiquan, and ZENG Xiangping. Robust diffusion affine projection algorithm with variable step-size over distributed networks[J]. IEEE Access, 2019, 7: 150484–150491. doi: 10.1109/ACCESS.2019.2947636 YU Yi, LU Lu, ZHENG Zongsheng, et al. DCD-based recursive adaptive algorithms robust against impulsive noise[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(7): 1359–1363. doi: 10.1109/TCSII.2019.2936407 倪锦根, 马兰申. 抗脉冲干扰的分布式仿射投影符号算法[J]. 电子学报, 2016, 44(7): 1555–1560.NI Jingen and MA Lanshen. Distributed affine projection sign algorithms against impulsive interferences[J]. Acta Electronica Sinica, 2016, 44(7): 1555–1560. SEO J H, JUNG S M, and PARK P. Diffusion proportionate affine projection sign algorithm for distributed estimation over network[C]. The 14th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Phuket, Thailand, 2017: 636–639. YU Yi and ZHAO Haiquan. Incremental M-estimate-based least-mean algorithm over distributed network[J]. Electronics Letters, 2016, 52(14): 1270–1272. doi: 10.1049/el.2016.1190 SINHA S K. Robust analysis of generalized linear mixed models[J]. Journal of the American Statistical Association, 2004, 99(466): 451–460. doi: 10.1198/016214504000000340 MAJHI B, PANDA G, and MULGREW B. Robust identification using new wilcoxon least mean square algorithm[J]. Electronics Letters, 2009, 45(6): 334–335. doi: 10.1049/el.2009.2582 BAN S J and KIM S W. Wilcoxon adaptive algorithms for robust identification[J]. Electronics Letters, 2009, 45(18): 958–959. doi: 10.1049/el.2009.1556 SAHOO U K, PANDA G, and MULGREW B. Sign-regressor wilcoxon and sign-sign wilcoxon[C]. 2010 International Conference on Advances in Recent Technologies in Communication and Computing, Kottayam, India, 2010: 35–39. KUMAR S, SAHOO A K, SAHOO U K, et al. QR-based robust diffusion strategies for wireless sensor networks using minimum-Wilcoxon-norm[J]. IET Signal Processing, 2016, 10(5): 439–448. doi: 10.1049/iet-spr.2015.0386 KUMAR S, SAHOO U K, SAHOO A K, et al. Diffusion minimum-wilcoxon-norm over distributed adaptive networks: Formulation and performance analysis[J]. Digital Signal Processing, 2016, 51: 156–169. doi: 10.1016/j.dsp.2016.02.001 YOO J W, SHIN J W, and PARK P G. Variable step-size affine projection sign algorithm[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2014, 61(4): 274–278. doi: 10.1109/TCSII.2014.2305013 -


 下载:
下载:


图(4)
计量
- 文章访问数: 1540
- HTML全文浏览量: 565
- PDF下载量: 107
- 被引次数: 0
