

Aircraft Target Detection in Remote Sensing Image Based on Multi-scale Circle Frequency Filter and Convolutional Neural Network
-
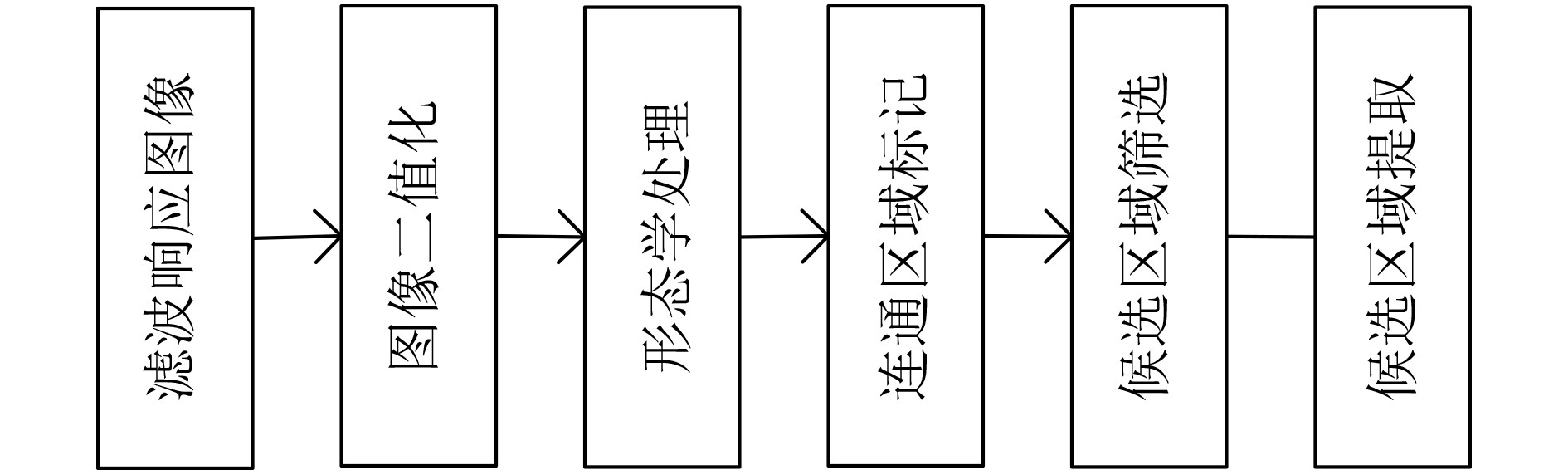
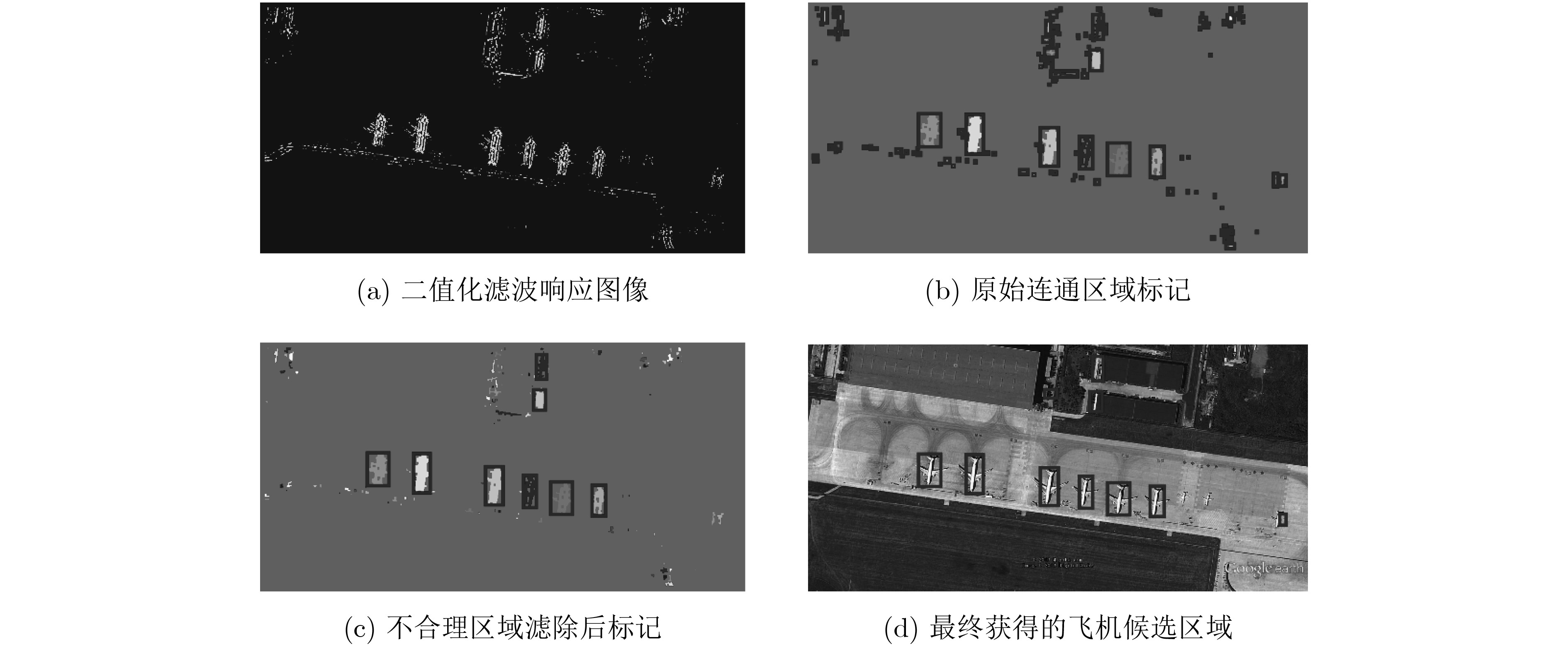
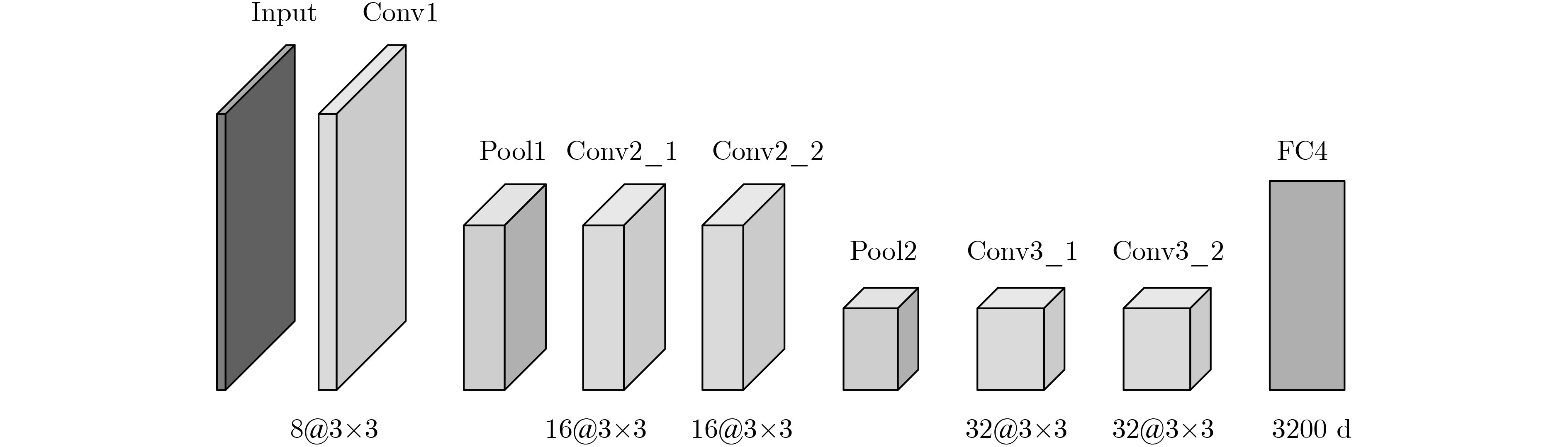
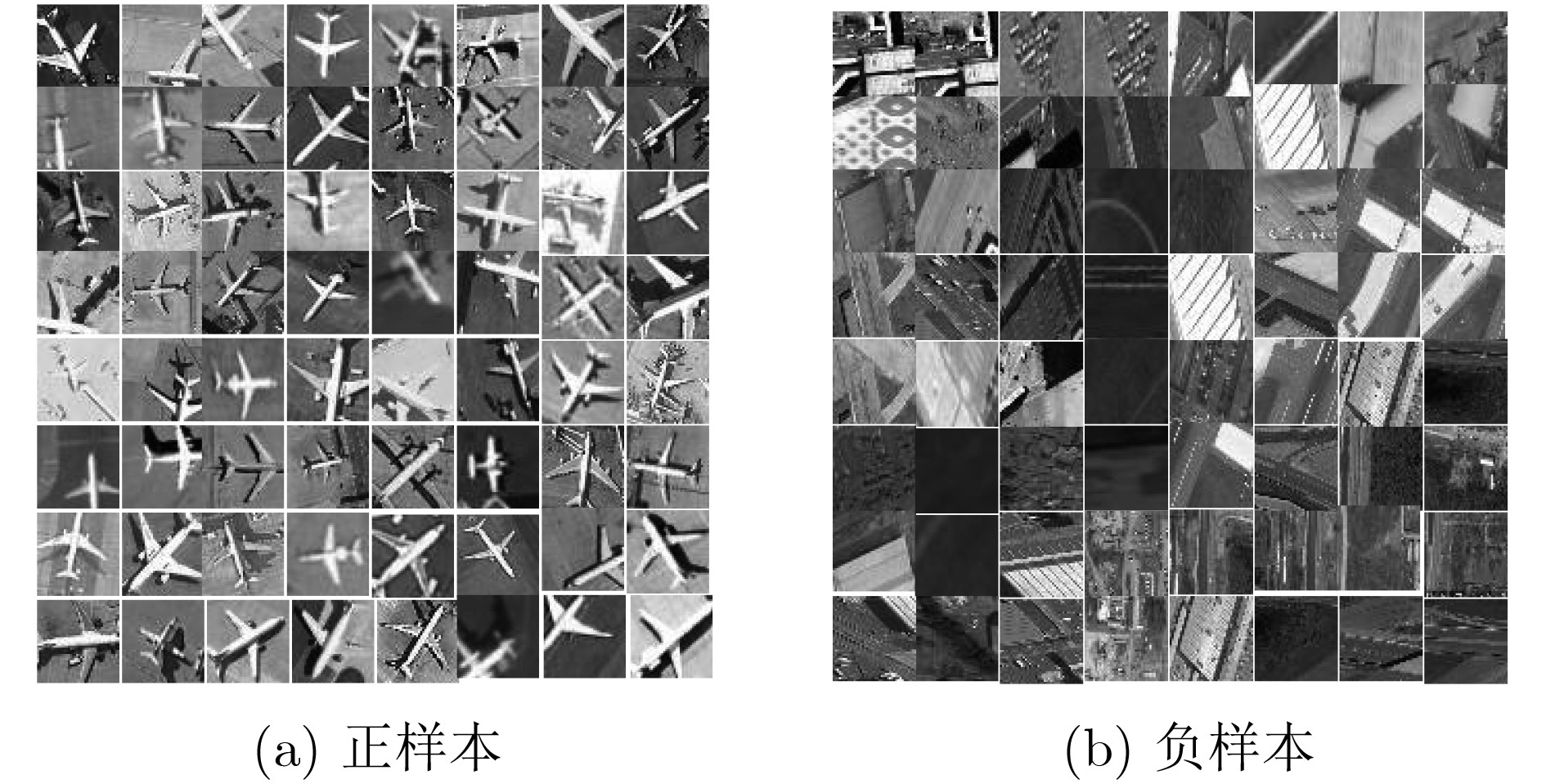
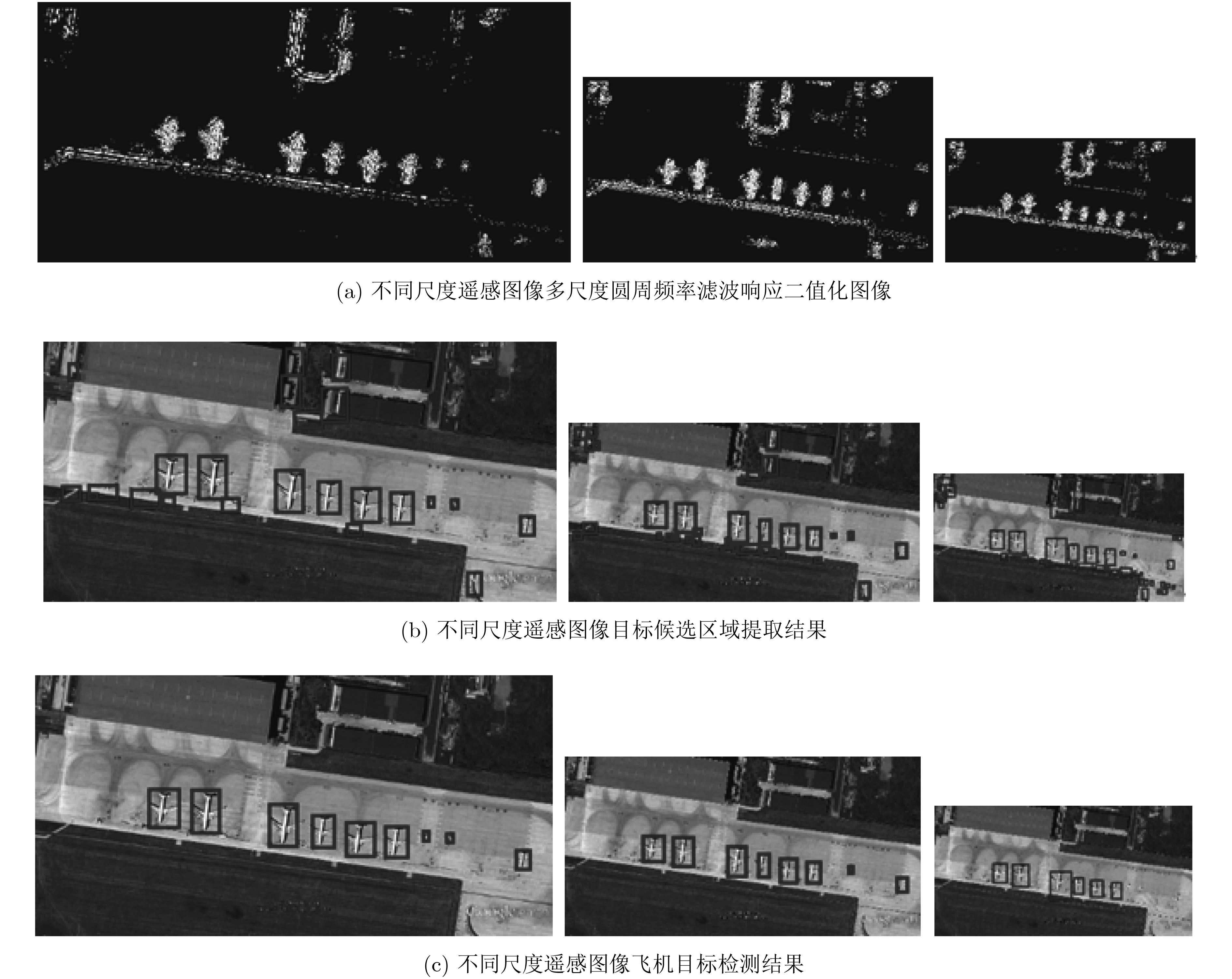
摘要: 针对遥感图像飞机目标检测因目标尺度不一存在漏警、虚警等问题,该文基于遥感图像中飞机目标形状特征和灰度变化特点提出了一种多尺度圆周频率滤波(MSCFF)与卷积神经网络(CNN)相结合的MSCFF+CNN飞机目标自动检测算法。该算法首先采用多尺度圆周频率滤波器滤除遥感图像复杂背景,实现不同尺度飞机目标候选区域提取;然后,通过构建卷积神经网络(CNN)模型实现候选区域有效分类,最终精确确定飞机目标位置。最后,基于获取的真实遥感图像进行目标检测算法实验验证,经统计该算法的飞机目标检测率为94.38%,虚警率为3.76%,实验结果充分验证了该文算法的有效性,该算法可为机场监管、军事侦察等应用提供重要的技术支持。
-
关键词:
- 遥感图像处理 /
- 飞机目标检测 /
- 多尺度圆周频率滤波器 /
- 卷积神经网络
Abstract: In view of the problems of missed alarm and false alarm caused by the different scales of aircrafts in aircraft target detection tasks for remote sensing images, a Multi-Scale Cirale Frequency Filter (MSCFF) and Convolutional Neural Network (CNN) aircraft target automatic detection algorithm is proposed based on the shape characteristics and gray-scale changes of aircraft targets. Firstly, the multi-scale circle frequency filter is used to filter out the complex background of remote sensing images to extract the candidate region of aircraft targets on different scales. Then, the Convolutional Neural Network (CNN) model is constructed to realize the effective classification of candidate regions, and finally the aircraft target position is accurately determined. The target detection algorithm is experimentally verified based on the obtained real remote sensing images. It shows that the aircraft target detection rate and the false alarm rate are 94.38% and 3.76% respectively. The experimental results fully verify the effectiveness of the proposed algorithm, which can provide important technical support for airport supervision, military reconnaissance and other applications. -
[1] AN Zhenyu, SHI Zhenwei, TENG Xichao, et al. An automated airplane detection system for large panchromatic image with high spatial resolution[J]. Optik, 2014, 125(12): 2768–2775. doi: 10.1016/j.ijleo.2013.12.003 [2] LIU Liu and SHI Zhenwei. Airplane detection based on rotation invariant and sparse coding in remote sensing images[J]. Optik, 2014, 125(18): 5327–5333. doi: 10.1016/j.ijleo.2014.06.062 [3] WU Hui, ZHANG Hui, ZHANG Jinfang, et al. Fast aircraft detection in satellite images based on convolutional neural networks[C]. 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, Canada, 2015: 4210–4214. doi: 10.1109/ICIP.2015.7351599. [4] YU Yongtao, GUAN Haiyan, ZAI Dawei, et al. Rotation-and-scale-invariant airplane detection in high-resolution satellite images based on deep-Hough-forests[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 112: 50–64. doi: 10.1016/j.isprsjprs.2015.04.014 [5] LUO Qinhan and SHI Zhenwei. Airplane detection in remote sensing images based on object proposal[C]. 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 2016: 1388–1391. doi: 10.1109/IGARSS.2016.7729355. [6] LI Bangyu, CUI Xiaoguang, and BAI Jun. A cascade structure of aircraft detection in high resolution remote sensing images[C]. Proceedings of 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 2016: 653–656. doi: 10.1109/IGARSS.2016.7729164. [7] DIAO Wenhui, SUN Xian, ZHENG Xinwei, et al. Efficient saliency-based object detection in remote sensing images using deep belief networks[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(2): 137–141. doi: 10.1109/LGRS.2015.2498644 [8] ZHU Mingming, XU Yuelei, MA Shiping, et al. Effective airplane detection in remote sensing images based on multilayer feature fusion and improved nonmaximal suppression algorithm[J]. Remote Sensing, 2019, 11(9): 1062. doi: 10.3390/rs11091062 [9] REN Shaoqing, HE Kaiming, GIRSHICK S, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137–1149. doi: 10.1109/TPAMI.2016.2577031 [10] 李淑敏, 冯权泷, 梁其椿, 等. 基于深度学习的国产高分遥感影像飞机目标自动检测[J]. 遥感技术与应用, 2018, 33(6): 1095–1102. doi: 10.11873/j.issn.1004-0323.2018.6.1095LI Shumin, FENG Quanlong, LIANG Qichun, et al. Aircraft auto-detection in domestic high resolution remote sensing-images using deep-learning[J]. Remote Sensing Technology and Application, 2018, 33(6): 1095–1102. doi: 10.11873/j.issn.1004-0323.2018.6.1095 [11] 戴伟聪, 金龙旭, 李国宁, 等. 遥感图像中飞机的改进YOLOv3实时检测算法[J]. 光电工程, 2018, 45(12): 180350. doi: 10.12086/oee.2018.180350DAI Weicong, JIN Longxu, LI Guoning, et al. Real-time airplane detection algorithm in remote-sensing images based on improved YOLOv3[J]. Opto-Electronic Engineering, 2018, 45(12): 180350. doi: 10.12086/oee.2018.180350 [12] 宋萍, 许光銮, 周沿海, 等. 基于MRNSSD模型的遥感图像中飞机目标检测方法[J]. 计算机与现代化, 2018(12): 110–115. doi: 10.3969/j.issn.1006-2475.2018.12.021SONG Ping, XU Guangluan, ZHOU Yanhai, et al. Aircraft detection method based on MRNSSD model for remote sensing images[J]. Computer and Modernization, 2018(12): 110–115. doi: 10.3969/j.issn.1006-2475.2018.12.021 [13] 余春艳, 徐小丹, 钟诗俊. 面向显著性目标检测的SSD改进模型[J]. 电子与信息学报, 2018, 40(11): 2554–2561. doi: 10.11999/JEIT180118YU Chunyan, XU Xiaodan, and ZHONG Shijun. An improved SSD model for saliency object detection[J]. Journal of Electronics &Information Technology, 2018, 40(11): 2554–2561. doi: 10.11999/JEIT180118 [14] CHEN Zhong, ZHANG Ting, and OUYANG Chao. End-to-end airplane detection using transfer learning in remote sensing images[J]. Remote Sensing, 2018, 10(1): 139. doi: 10.3390/rs10010139 [15] 唐玮, 赵保军, 龙腾. 基于轻量化网络的光学遥感图像飞机目标检测[J]. 信号处理, 2019, 35(5): 768–774. doi: 10.16798/j.issn.1003-0530.2019.05.005TANG Wei, ZHAO Baojun, and LONG Teng. Aircraft detection in remote sensing image based on lightweight network[J]. Journal of Signal Processing, 2019, 35(5): 768–774. doi: 10.16798/j.issn.1003-0530.2019.05.005 [16] 郭智, 宋萍, 张义, 等. 基于深度卷积神经网络的遥感图像飞机目标检测方法[J]. 电子与信息学报, 2018, 40(11): 2684–2690. doi: 10.11999/JEIT180117GUO Zhi, SONG Ping, ZHANG Yi, et al. Aircraft detection method based on deep convolutional neural network for remote sensing images[J]. Journal of Electronics &Information Technology, 2018, 40(11): 2684–2690. doi: 10.11999/JEIT180117 [17] 王鑫, 李可, 宁晨, 等. 基于深度卷积神经网络和多核学习的遥感图像分类方法[J]. 电子与信息学报, 2019, 41(5): 1098–1105. doi: 10.11999/JEIT180628WANG Xin, LI Ke, NING Chen, et al. Remote sensing image classification method based on deep convolution neural network and multi-kernel learning[J]. Journal of Electronics &Information Technology, 2019, 41(5): 1098–1105. doi: 10.11999/JEIT180628 [18] 罗会兰, 卢飞, 孔繁胜. 基于区域与深度残差网络的图像语义分割[J]. 电子与信息学报, 2019, 41(11): 2777–2786. doi: 10.11999/JEIT190056LUO Huilan, LU Fei, and KONG Fansheng. Image semantic segmentation based on region and deep residual network[J]. Journal of Electronics &Information Technology, 2019, 41(11): 2777–2786. doi: 10.11999/JEIT190056 -


 下载:
下载:





图(9) / 表(1)
计量
- 文章访问数: 2173
- HTML全文浏览量: 1268
- PDF下载量: 129
- 被引次数: 0
