

Study of Array Structure for Sensor Placement in PDOA-based Hit Position Estimation
-
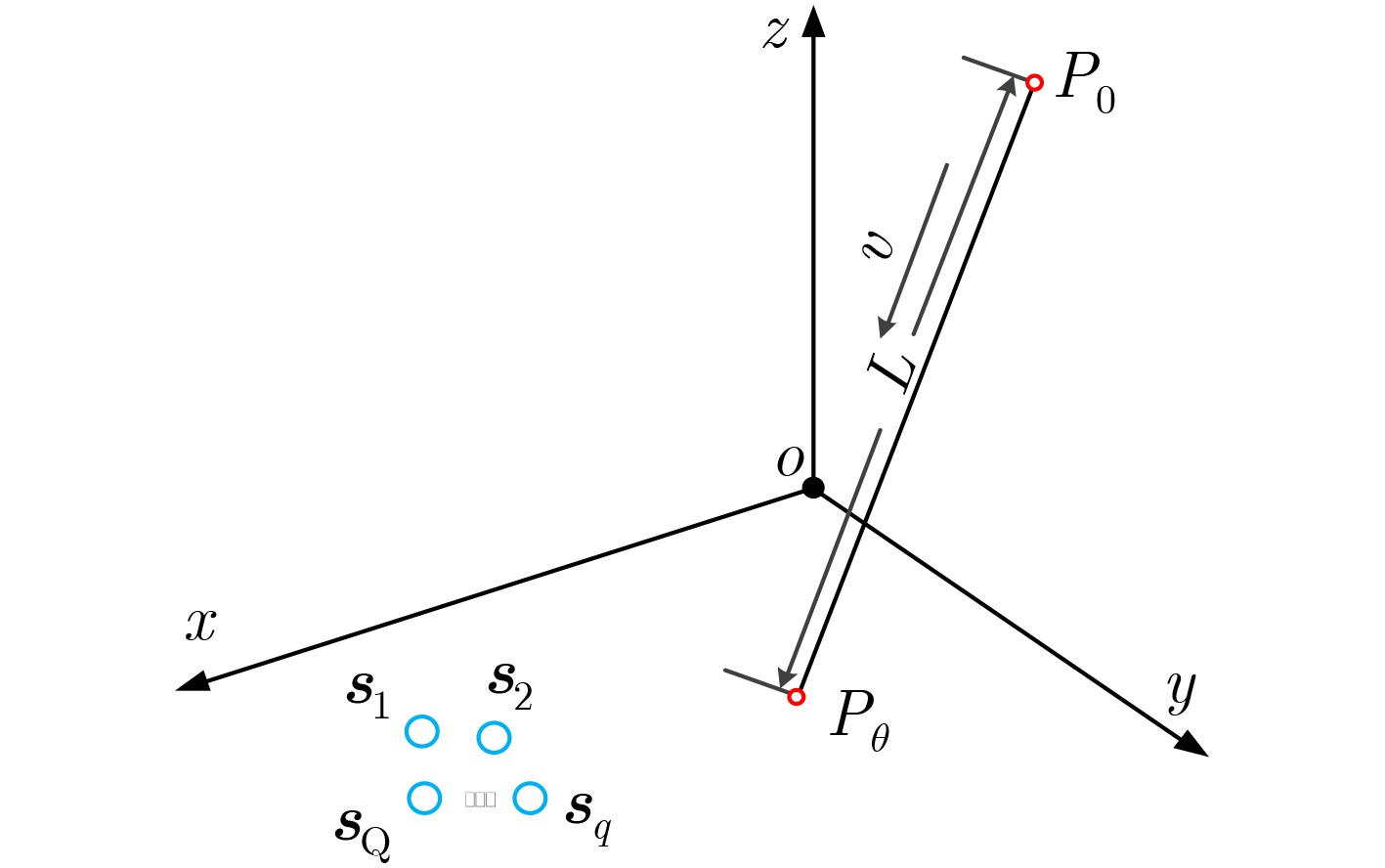
摘要: 在基于到达相位差(Phase Differences Of Arrival, PDOA)的着靶点参数估计问题中,估计精度受到阵列结构的影响。与一般的单点目标定位问题相比,着靶点参数估计需要同时估计目标的速度和角度参数,情况更加复杂。为了选择合适的阵列结构以对定位结果带来有利影响,该文从灵敏度的角度分析了不同阵列结构下靶点参数估计精度各有差异的原因,为判断不同情况下接收阵列定位性能的优劣提供了理论方法。最后,对3种常见阵列结构进行了计算机仿真对比,仿真结果验证了利用灵敏度指标对阵列布放结构进行评估的可行性。Abstract: Different sensor placements have a great influence on the accuracy in Phase Differences Of Arrival (PDOA)-based hit position estimation. Compared with single time target localization, estimation of hit position is more complex because of additionally considering speed and its direction. In order to choose an adequate sensor geometry for source localization, a method of evaluating the performance of sensor placement by sensitivity analysis is proposed, which provides a theoretical foundation for analyzing the accuracy of hit position estimation. Then the sensitivities of three typical sensor geometries are analyzed and Cramer-Rao Lower Bound is compared to verify the effectiveness of the proposed method using computer simulations.
-
Key words:
- Hit position estimation /
- Phase Differences of Arrival /
- Array structure
-
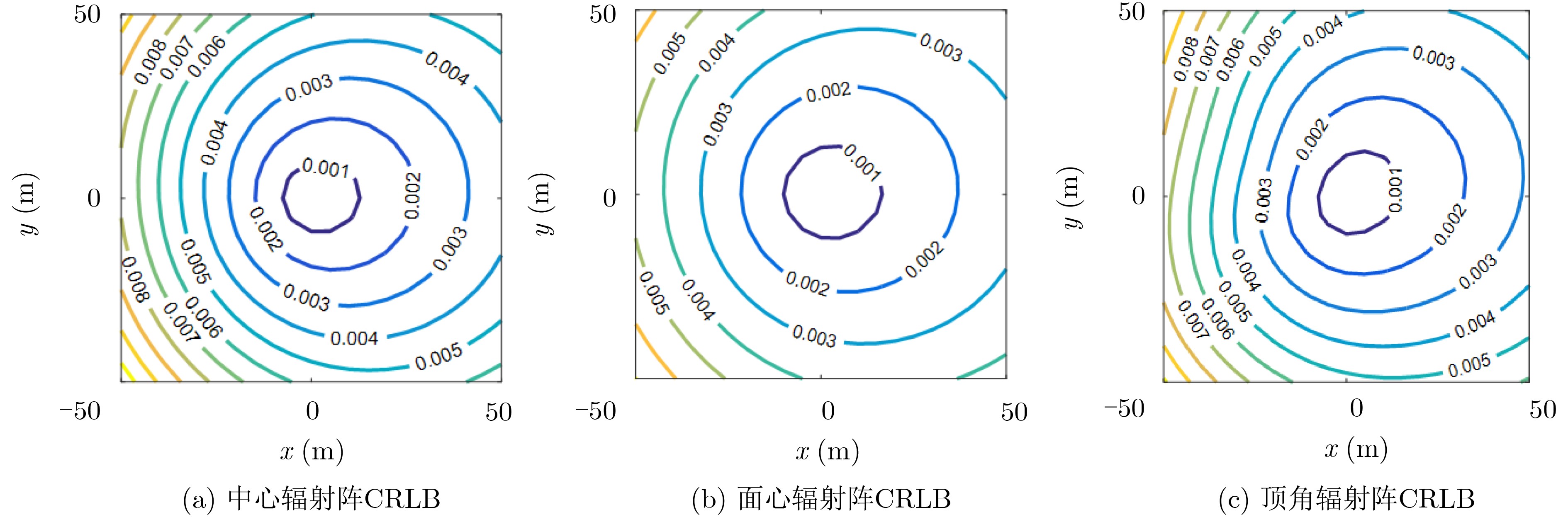
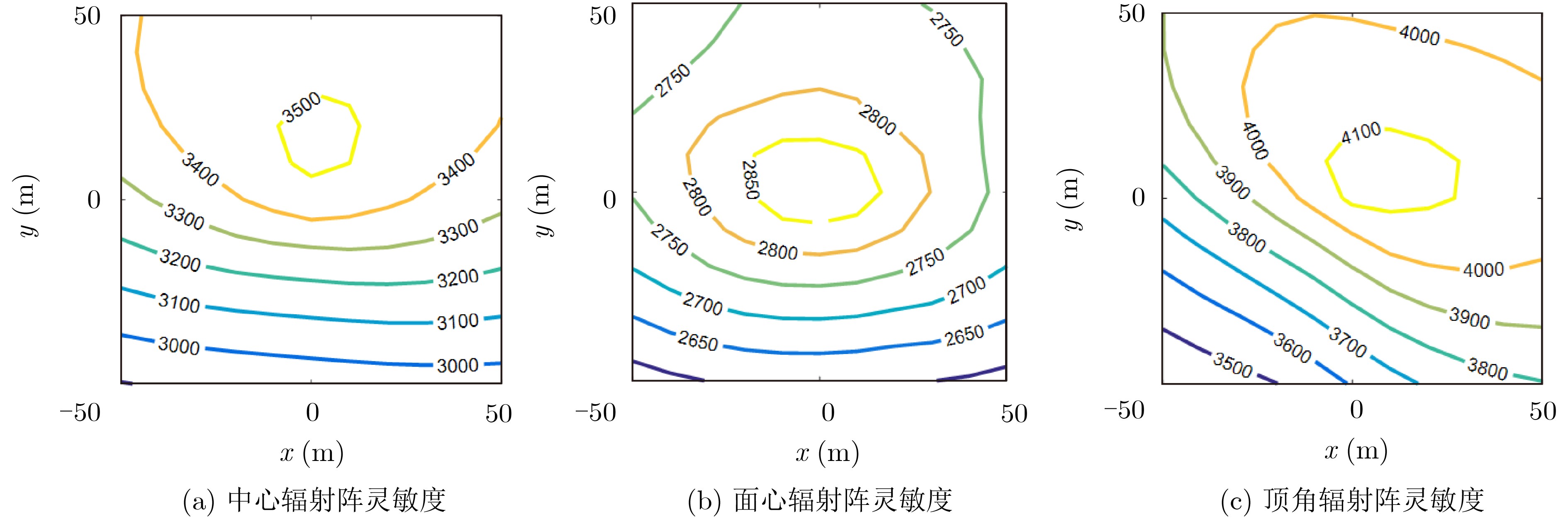
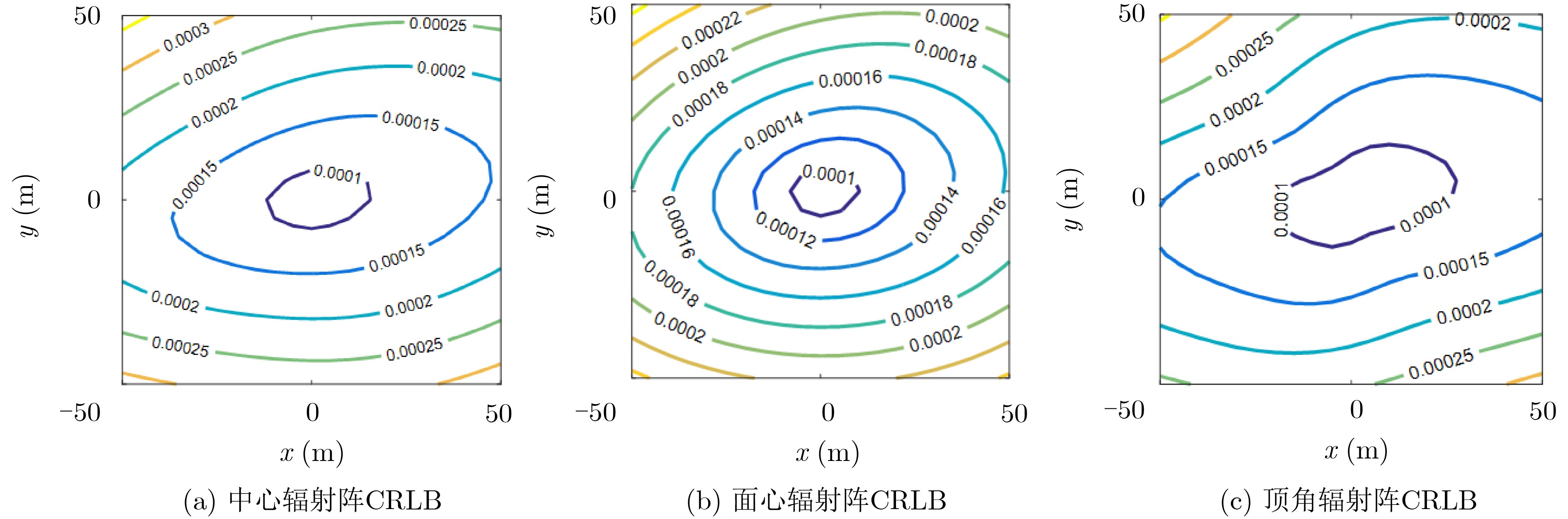
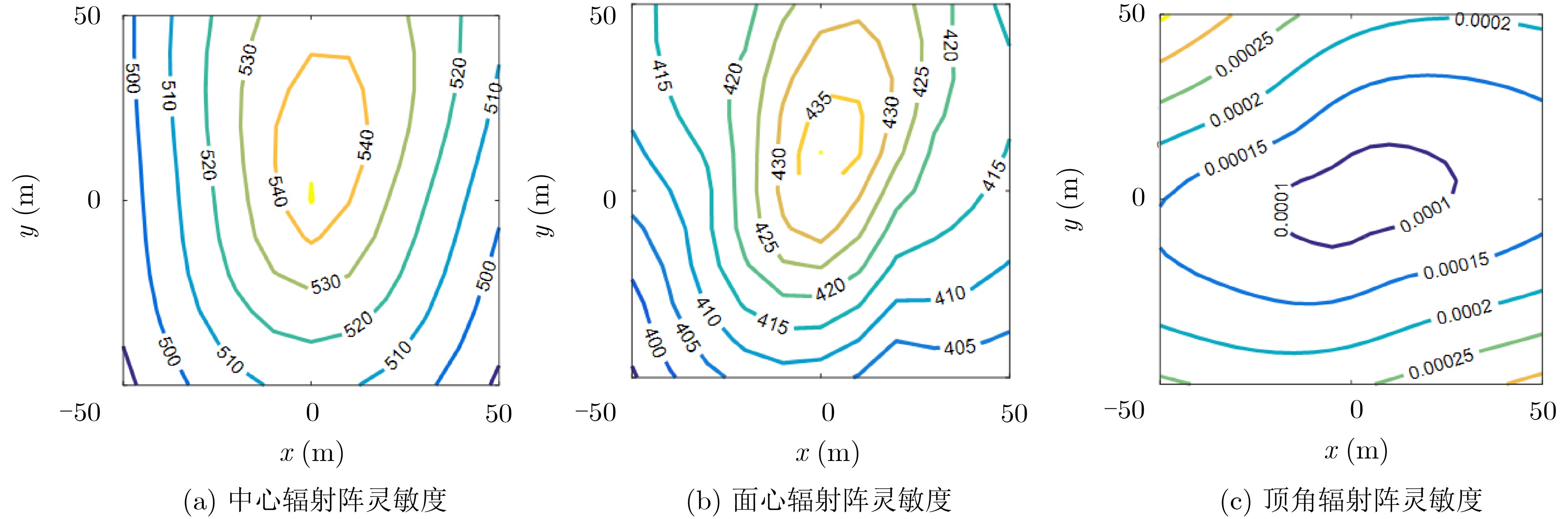
表 1 不同阵列的灵敏度和CRLB对比
坐标 (m) (0,0,0) (10,10,0) (20,20,0) (30,30,0) (40,40,0) (50,50,0) 中心辐射阵灵敏度 90.47 59.27 49.49 44.13 40.43 37.60 面心辐射阵灵敏度 132.31 83.81 69.89 62.36 57.23 53.34 顶角辐射阵灵敏度 92.06 59.83 50.14 44.83 41.16 38.35 中心辐射阵CRLB 3.9e-5 5.9e-4 0.0017 0.0031 0.0049 0.0071 面心辐射阵CRLB 4.8e-5 3.7e-4 0.001 0.0019 0.0029 0.0041 顶角辐射阵CRLB 4.7e-5 4.1e-4 0.0011 0.002 0.0031 0.0045  下载: 导出CSV
下载: 导出CSV
-
[1] 魏国华, 吴嗣亮, 王菊, 等. 脱靶量测量技术综述[J]. 系统工程与电子技术, 2004, 26(6): 768–772, 847. doi: 10.3321/j.issn:1001-506X.2004.06.018WEI Guohua, WU Siliang, WANG Ju, et al. Overview of miss distance measurement technology[J]. Systems Engineering and Electronics, 2004, 26(6): 768–772, 847. doi: 10.3321/j.issn:1001-506X.2004.06.018 [2] 左燕, 周夏磊, 蒋陶然. 传感器位置误差下外辐射源雷达三维定位代数解算法[J]. 电子与信息学报, 2020, 42(3): 555–562. doi: 10.11999/JEIT190292ZUO Yan, ZHOU Xialei, and JIANG Taoran. Algebraic solution for 3D localization of multistatic passive radar in the presence of sensor position errors[J]. Journal of Electronics &Information Technology, 2020, 42(3): 555–562. doi: 10.11999/JEIT190292 [3] 王亚涛, 曾小东, 周龙建. 雷达间歇辐射对测向交叉定位性能的影响分析[J]. 电子与信息学报, 2020, 42(2): 452–457. doi: 10.11999/JEIT190110WANG Yatao, ZENG Xiaodong, and ZHOU Jianlong. Analysis for effect of radar intermittent radiation on the performance of cross Longjian[J]. Journal of Electronics &Information Technology, 2020, 42(2): 452–457. doi: 10.11999/JEIT190110 [4] SU Ting and GAO Yong. TDOA estimation of dual-satellites interference localization based on blind separation[J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 696–702. doi: 10.21629/JSEE.2019.04.07 [5] MA Yongtao, WANG Bobo, PEI Shuyang, et al. An indoor localization method based on AOA and PDOA using virtual stations in multipath and NLOS environments for passive UHF RFID[J]. IEEE Access, 2018, 6: 31772–31782. doi: 10.1109/ACCESS.2018.2838590 [6] ZHOU Yifeng, LEUNG H, and YIP P C. An exact maximum likelihood registration algorithm for data fusion[J]. IEEE Transactions on Signal Processing, 1997, 45(6): 1560–1573. doi: 10.1109/78.599998 [7] TAN Zilong, ZHANG Huaguang, SUN Jiayue, et al. Research on identification process of nonlinear system based on an improved recursive least squares algorithm[C]. Proceedings of 2019 Chinese Control and Decision Conference, Nanchang, China, 2019: 1673–1678. doi: 10.1109/CCDC.2019.8832530. [8] MENG Wei, XIE Lihua, and XIAO Wendong. Optimal TDOA sensor-pair placement with uncertainty in source location[J]. IEEE Transactions on Vehicular Technology, 2016, 65(11): 9260–9271. doi: 10.1109/TVT.2016.2516031 [9] LUI K W K and SO H C. A study of two-dimensional sensor placement using time-difference-of-arrival measurements[J]. Digital Signal Processing, 2009, 19(4): 650–659. doi: 10.1016/j.dsp.2009.01.002 [10] 金博楠, 徐晓苏, 张涛, 等. 基于TDOA定位的阵列布放结构研究[J]. 导航定位与授时, 2017, 4(6): 29–36. doi: 10.19306/j.cnki.2095-8110.2017.06.005JIN Bonan, XU Xiaosu, ZHANG Tao, et al. Study of array structure for sensor placement in TDOA-based localization[J]. Navigation Positioning &Timing, 2017, 4(6): 29–36. doi: 10.19306/j.cnki.2095-8110.2017.06.005 [11] HU Dexiu, CHEN Shiwen, BAI Hang, et al. CRLB for joint estimation of TDOA, phase, FDOA, and Doppler rate[J]. The Journal of Engineering, 2019, 2019(21): 7628–7631. doi: 10.1049/joe.2019.0581 -

 下载:
下载:








图(9) / 表(1)
计量
- 文章访问数: 1217
- HTML全文浏览量: 711
- PDF下载量: 48
- 被引次数: 0
