

Blind Identification Algorithm of Polarization Code Parameters Based on Null Space Matrix Matching
-
摘要:
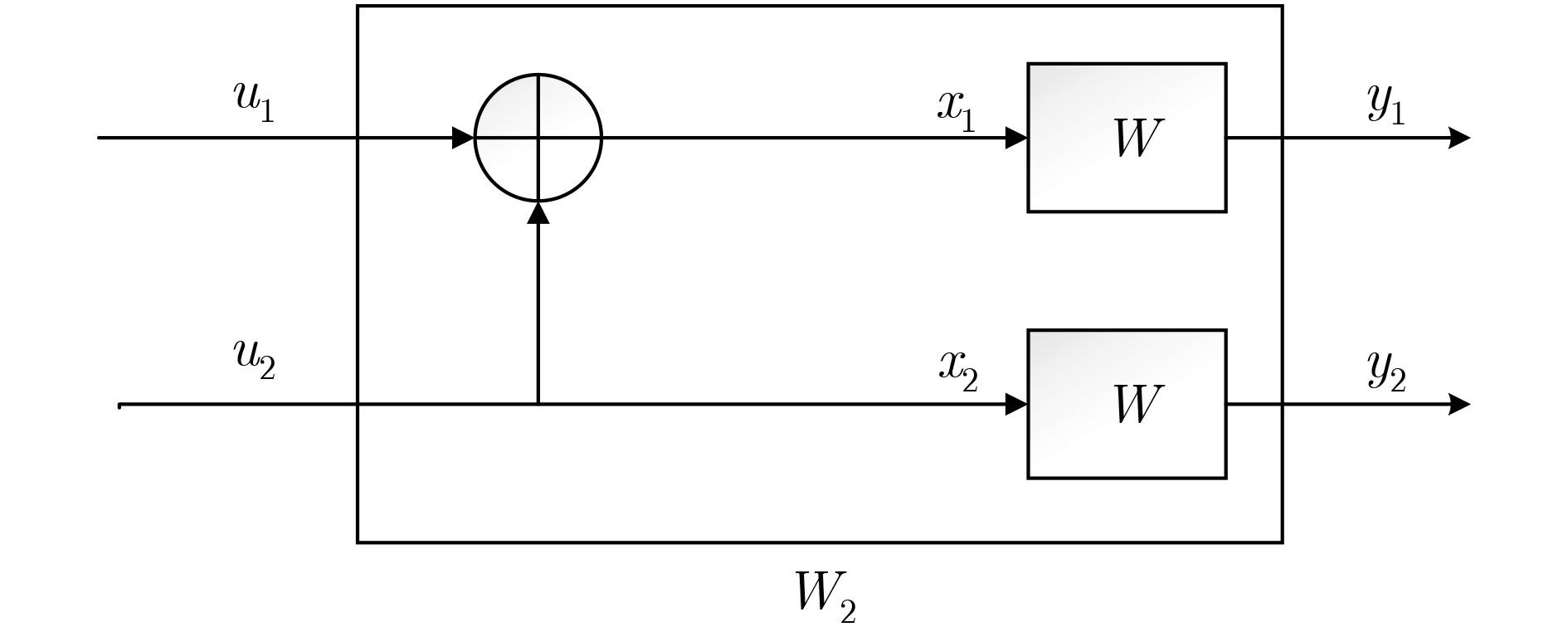
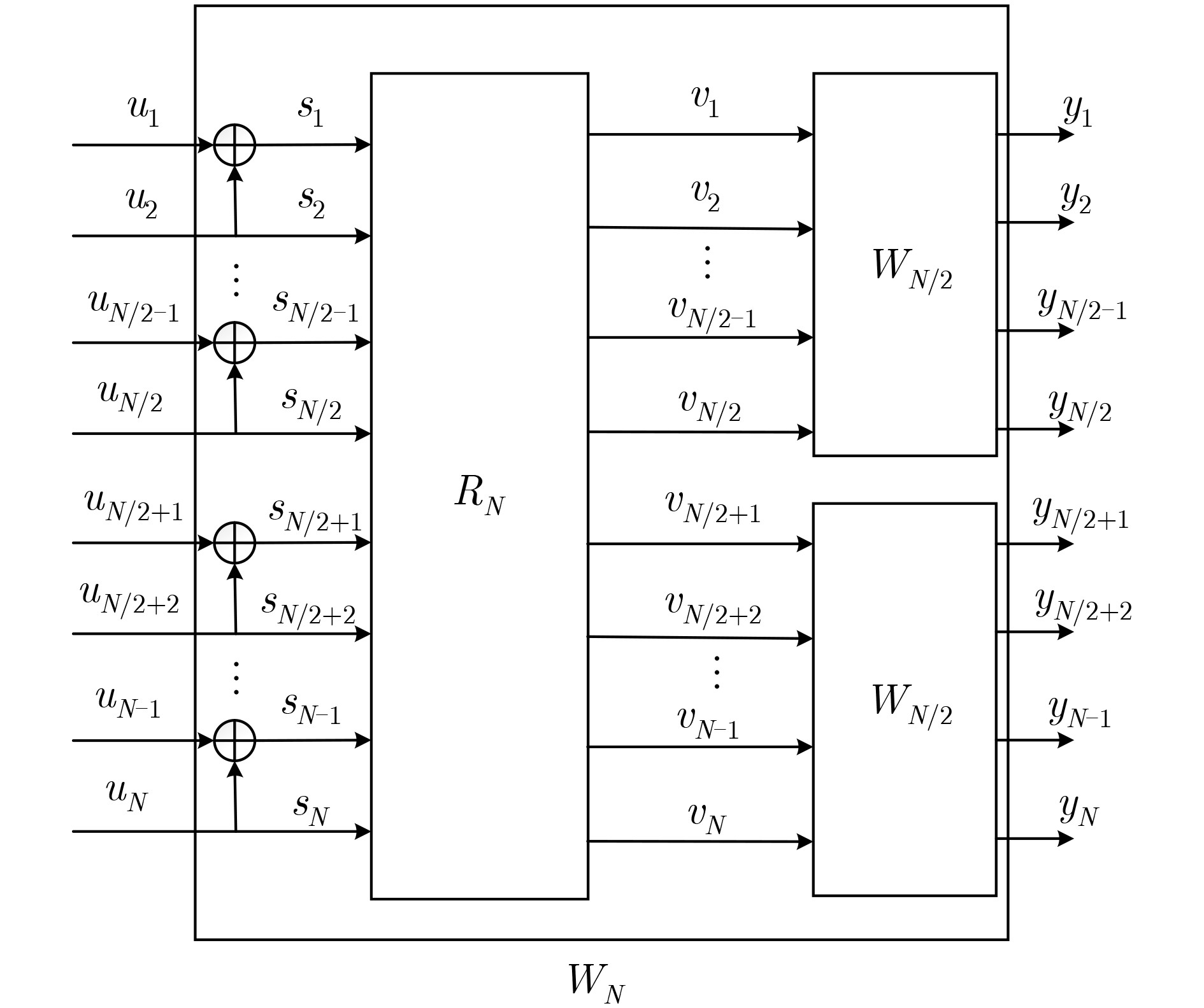
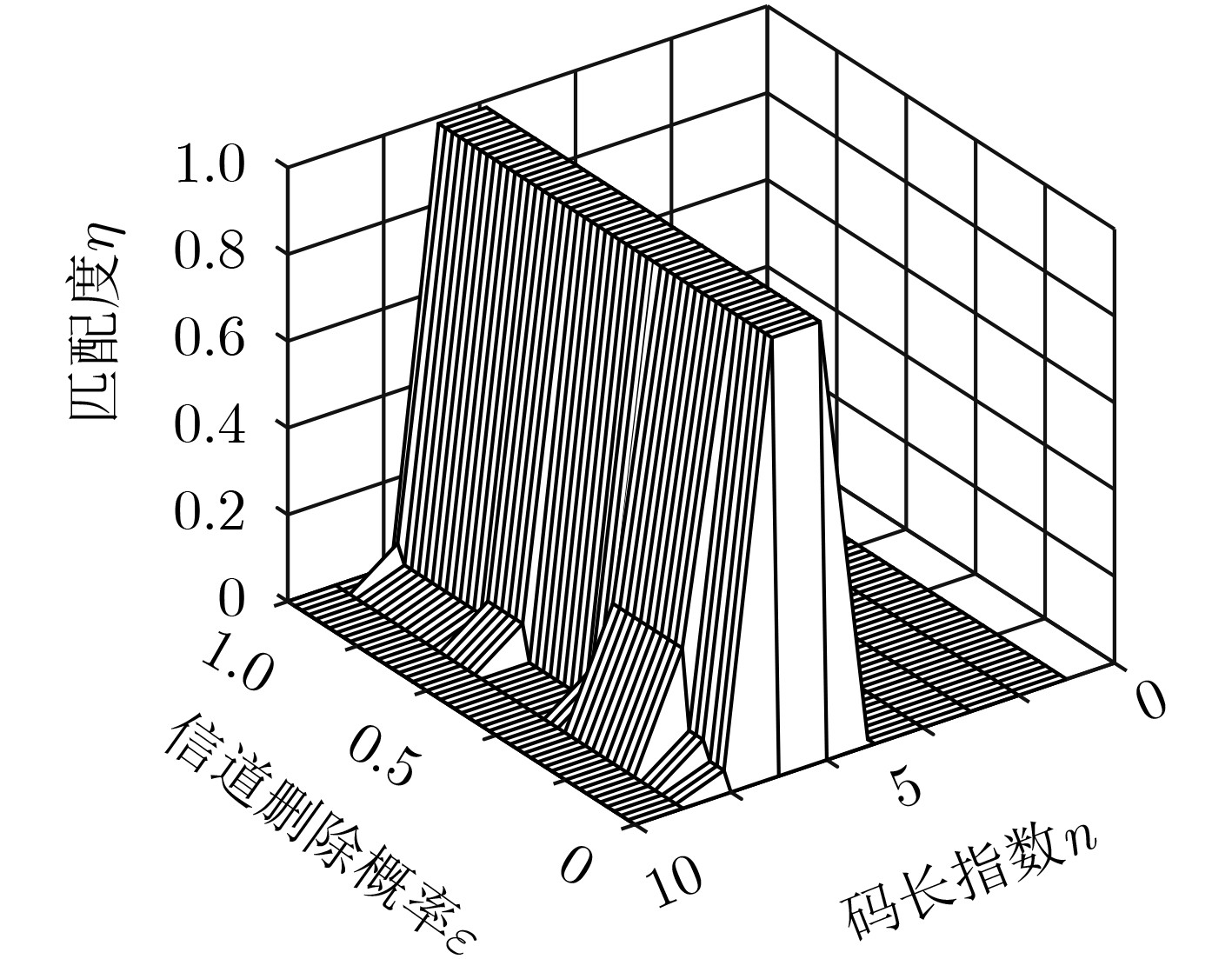
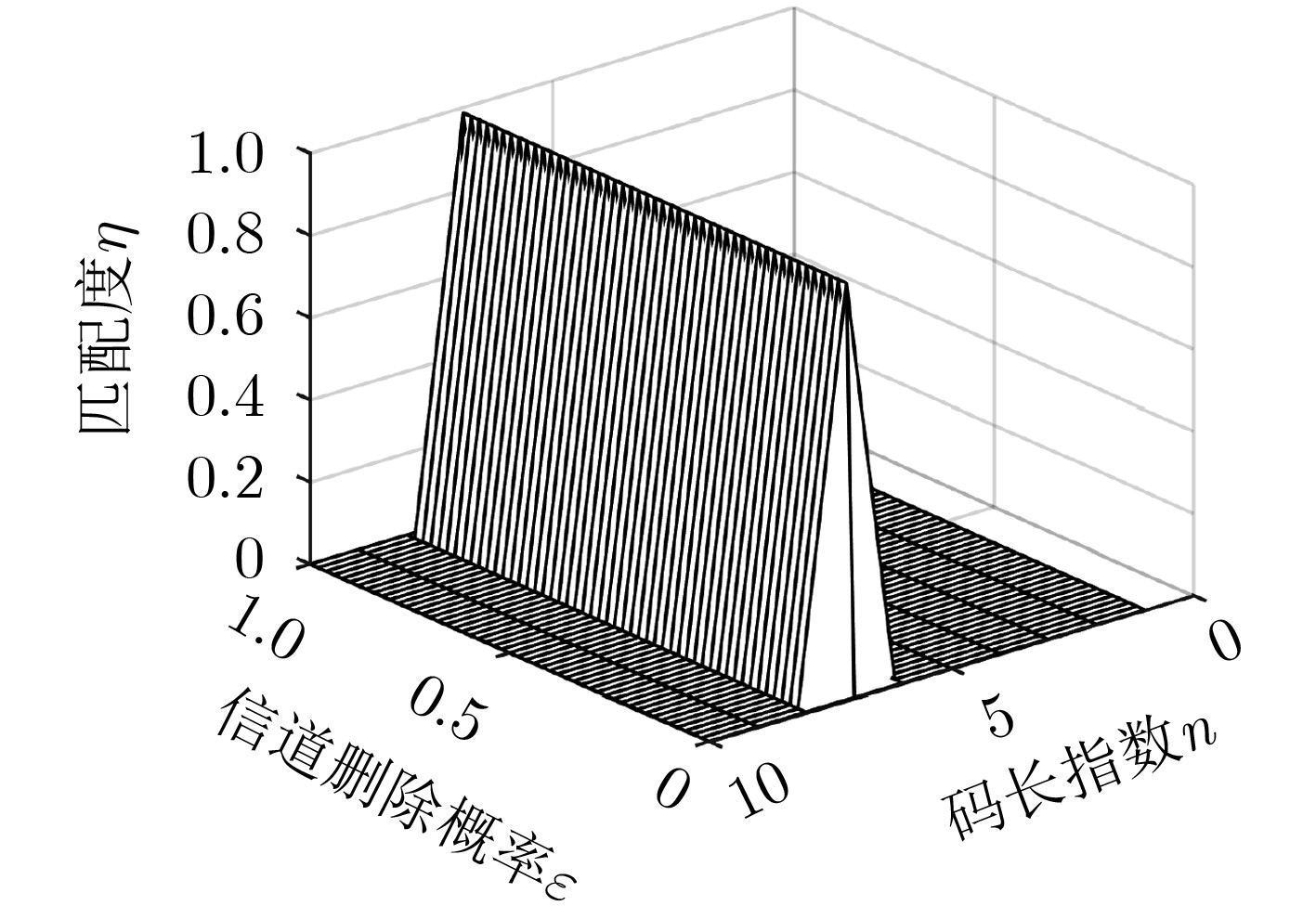
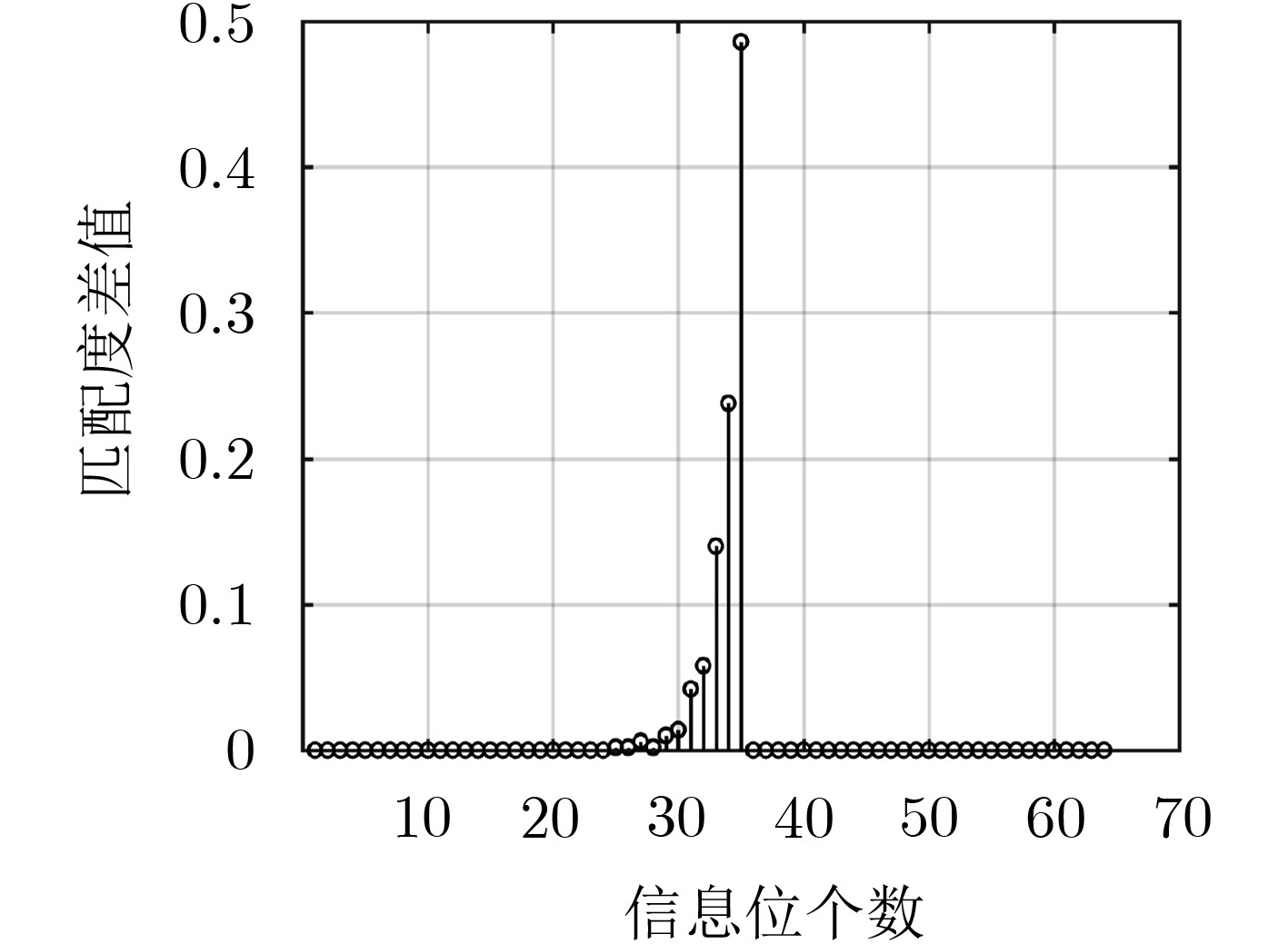
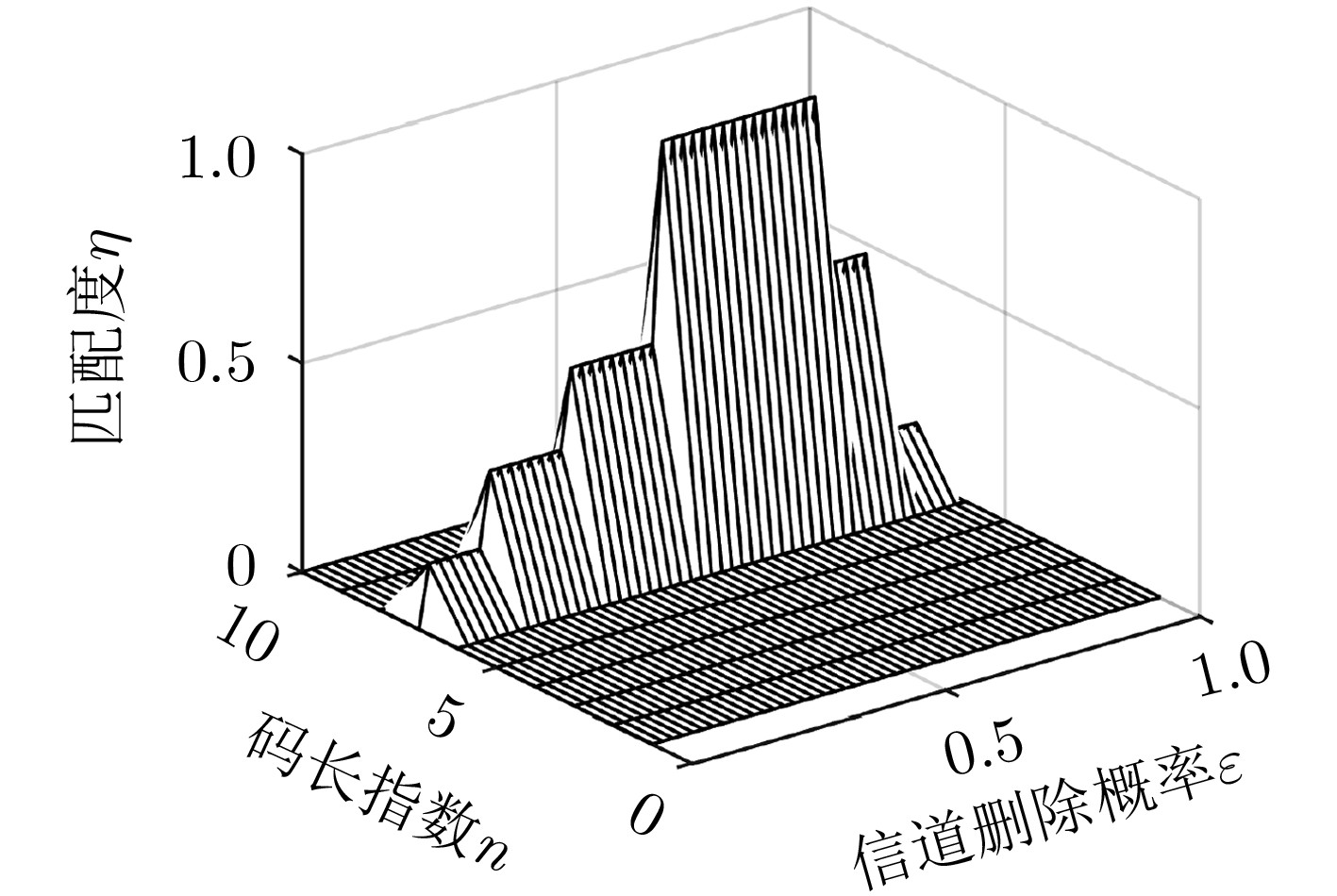
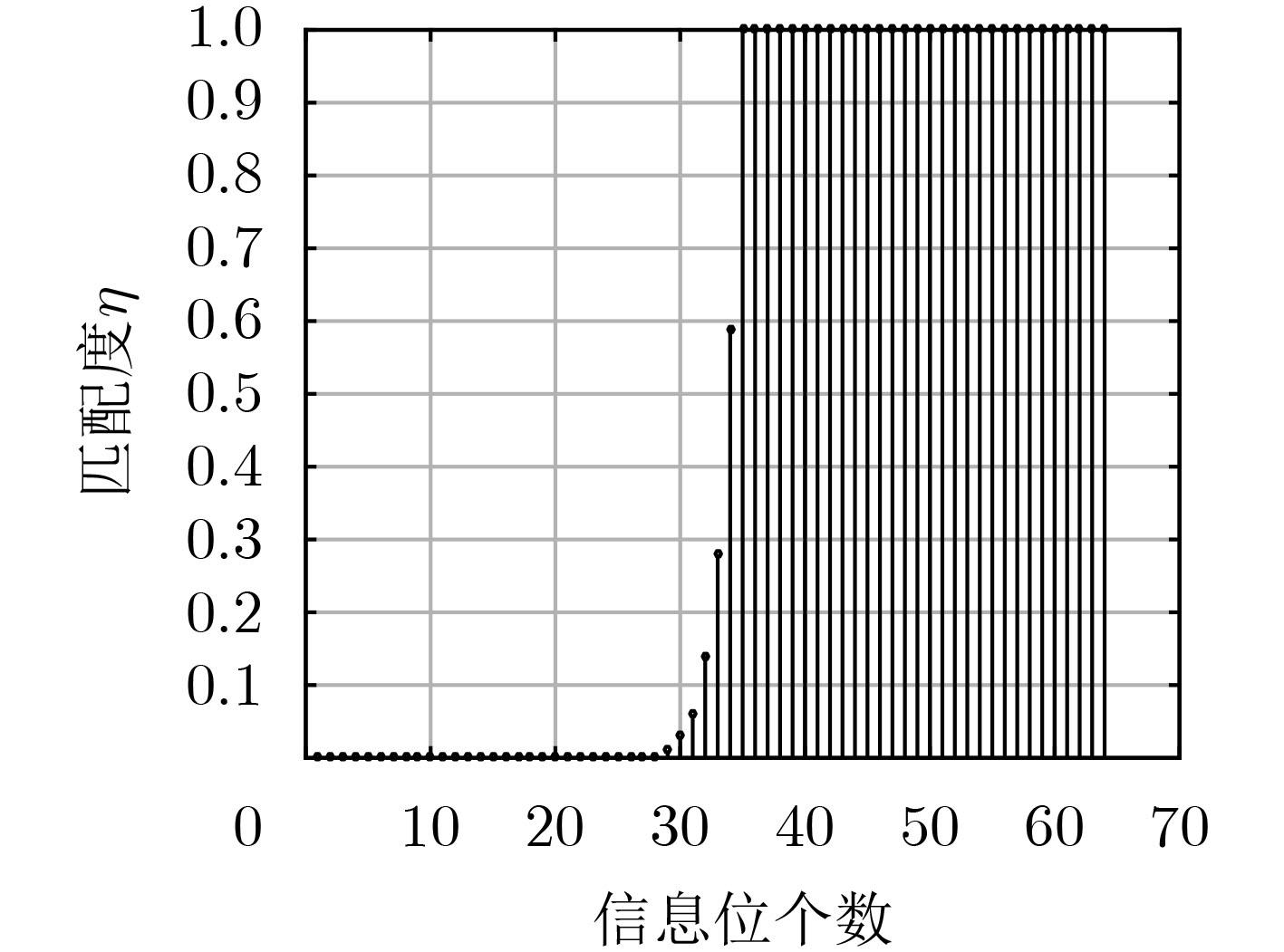
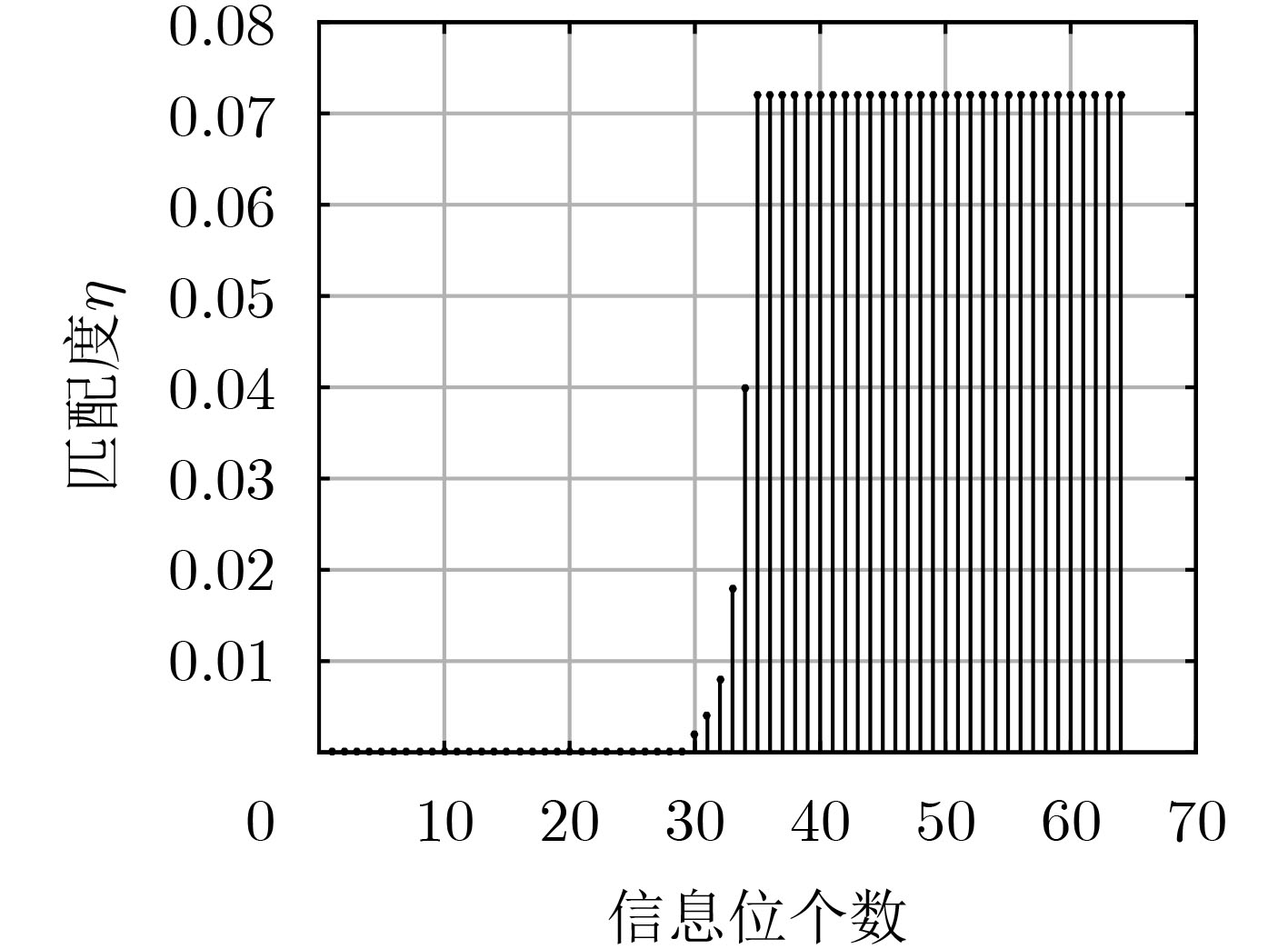
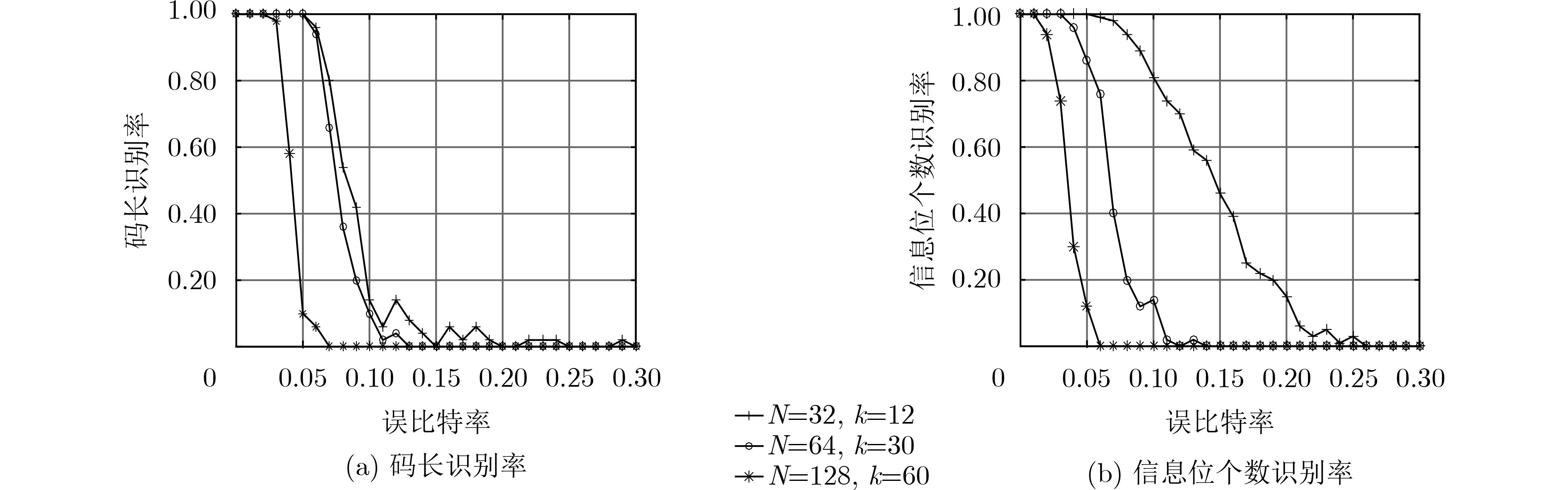
针对目前极化码参数盲识别问题,该文提出一种基于零空间矩阵匹配的极化码参数盲识别算法。由于极化码生成矩阵的构造是确定的,其生成矩阵都是满秩的方阵,该算法首先利用极化码编码中信道可靠性估计删除生成矩阵中冻结位码字对应的行,再找出该矩阵在二元域中的零空间矩阵作为该码长下的监督矩阵,用不同长度码长的监督矩阵与待检测的码字迭代相乘,根据乘积结果中“1”的比例来判断码字的码长、信息位个数和位置分布。仿真结果表明,针对200组码长64,信息位个数30的极化码,在最大误比特率不超过0.06时,识别率能保持在80%以上。
Abstract:To solve the problem of blind identification of polar codes’ parameters, a blind recognition algorithm of polar codes based on zero space matrix matching is proposed. The construction of polar codes’ generation matrix is certain, and all the generation matrices are full rank square matrices, first the rows corresponding to the frozen bit codes are deleted by using the channel reliability estimation in the polar code encoding. Then, the null space matrix of this matrix in the binary field is found out as the supervision matrix under the code length. The code word is iteratively multipied by the supervision matrix of different code lengths, according to the proportion of "1" in the product result, the code length, number and position distribution of information bits of the code word are determined. The simulation results show that for the 200 groups of polar code with 64-code-length and 30-information-bits, the recognition rate can be kept above 80% when the maximum bit error rate is less than 0.06.
-
Key words:
- Non-cooperative signal processing /
- Polar codes /
- Blind recognition
-
ARIKAN E. Channel polarization: A method for constructing capacity-achieving codes[C]. 2008 IEEE International Symposium on Information Theory, Toronto, Canada, 2008: 1173–1177. doi: 10.1109/ISIT.2008.4595172. GAMAGE H, RAJATHEVA N, and LATVA-AHO M. Channel coding for enhanced mobile broadband communication in 5G systems[C]. 2017 European Conference on Networks and Communications, Oulu, The Republic of Finland, 2017. doi: 10.1109/EuCNC.2017.7980697. 杨燕子, 李迟生, 罗伟娟. 线性分组码的盲识别技术研究[J]. 现代电子技术, 2018, 41(3): 23–26. doi: 10.16652/j.issn.1004-373x.2018.03.006YANG Yanzi, LI Chisheng, and LUO Weijuan. Research on blind recognition technology for linear block code[J]. Modern Electronics Technique, 2018, 41(3): 23–26. doi: 10.16652/j.issn.1004-373x.2018.03.006 陈金杰, 杨俊安. 基于码重分布信息熵的线性分组码盲识别方法[J]. 通信技术, 2018, 51(7): 1553–1560. doi: 10.3969/j.issn.1002-0802.2018.07.012CHEN Jinjie and YANG Jun’an. Linear-block-code blind recognition based on code-weight-distribution information entropy[J]. Communications Technology, 2018, 51(7): 1553–1560. doi: 10.3969/j.issn.1002-0802.2018.07.012 张天骐, 王俊霞, 江晓磊, 等. 基于校验矩阵匹配的循环码参数盲识别算法[J]. 电子与信息学报, 2017, 39(4): 901–907. doi: 10.11999/JEIT160575ZHANG Tianqi, WANG Junxia, JIANG Xiaolei, et al. Blind Recognition of Cyclic Code Based on Check Matrix Match Algorithm[J]. Journal of Electronics &Information Technology, 2017, 39(4): 901–907. doi: 10.11999/JEIT160575 刘健, 谢锘, 周希元. RS码的盲识别方法[J]. 电子科技大学学报, 2009, 38(3): 363–367. doi: 10.3969/j.issn.1001-0548.2009.03.011LIU Jian, XIE Nuo, and ZHOU Xiyuan. Blind recognition method of RS coding[J]. Journal of University of Electronic Science and Technology of China, 2009, 38(3): 363–367. doi: 10.3969/j.issn.1001-0548.2009.03.011 解辉, 黄知涛, 王丰华. 信道编码盲识别技术研究进展[J]. 电子学报, 2013, 41(6): 1166–1176. doi: 10.3969/j.issn.0372-2112.2013.06.019XIE Hui, HUANG Zhitao, and WANG Fenghua. Research progress of blind recognition of channel coding[J]. Acta Electronica Sinica, 2013, 41(6): 1166–1176. doi: 10.3969/j.issn.0372-2112.2013.06.019 姚智刚, 解辉, 韩壮志, 等. 基于分段Walsh-Hadamard变换的卷积码盲重构算法[J]. 电子与信息学报, 2019, 41(9): 2047–2054. doi: 10.11999/JEIT181139YAO Zhigang, XIE Hui, HAN Zhuangzhi, et al. Blind reconstruction of convolutional code based on partitioned walsh-hadamard transform[J]. Journal of Electronics &Information Technology, 2019, 41(9): 2047–2054. doi: 10.11999/JEIT181139 吴昭军, 张立民, 钟兆根, 等. 低信噪比下归零Turbo码码长及其帧同步识别[J]. 电子与信息学报, 2019, 41(9): 2063–2070. doi: 10.11999/JEIT180903WU Zhaojun, ZHANG Limin, ZHONG Zhaogen, et al. Blind recognition of code length and synchronization of turbo codes on trellis termination at low SNR[J]. Journal of Electronics &Information Technology, 2019, 41(9): 2063–2070. doi: 10.11999/JEIT180903 于清苹, 史治平. 5G信道编码技术研究综述[J]. 无线电通信技术, 2018, 44(1): 1–8. doi: 10.3969/j.issn.1003-3114.2018.01.01YU Qingping and SHI Zhiping. Research of channel coding techniques in 5G communications[J]. Radio Communications Technology, 2018, 44(1): 1–8. doi: 10.3969/j.issn.1003-3114.2018.01.01 吴道龙. 极化码构造与译码算法研究[D]. [博士论文], 西安电子科技大学, 2016.WU Daolong. Study on construction and decoding algorithms for polar codes[D]. [Ph. D. dissertation], Xidian University, 2016. TAL I and VARDY A. List decoding of polar codes[J]. IEEE Transactions on Information Theory, 2015, 61(5): 2213–2226. doi: 10.1109/TIT.2015.2410251 崔冰清, 褚丽莉, 孙国栋. 极化码在BEC信道下的性能分析[J]. 通信技术, 2017, 50(10): 2172–2177. doi: 10.3969/j.issn.1002-0802.2017.10.007CUI Bingqing, CHU Lili, and SUN Guodong. Performance analysis of polarization codes in BEC channel[J]. Communications Technology, 2017, 50(10): 2172–2177. doi: 10.3969/j.issn.1002-0802.2017.10.007 陈凯. 极化编码理论与实用方案研究[D]. [博士论文], 北京邮电大学, 2014.CHEN Kai. Research on polar coding theory and practical applications[D]. [Ph. D. dissertation], Beijing University of Posts and Telecommunications, 2014. 张亮. 极化码的译码算法研究及其应用[D]. [博士论文], 浙江大学, 2016.ZHANG Liang. On the investigation and application of decoding algorithms of polar codes[D]. [Ph. D. dissertation], Zhejiang University, 2016. -


 下载:
下载:




计量
- 文章访问数: 1773
- HTML全文浏览量: 706
- PDF下载量: 78
- 被引次数: 0
 下载:
下载:
