

A Multi-target Passive Tracking Algorithm Based on Unmanned Underwater Vehicle
-
摘要:
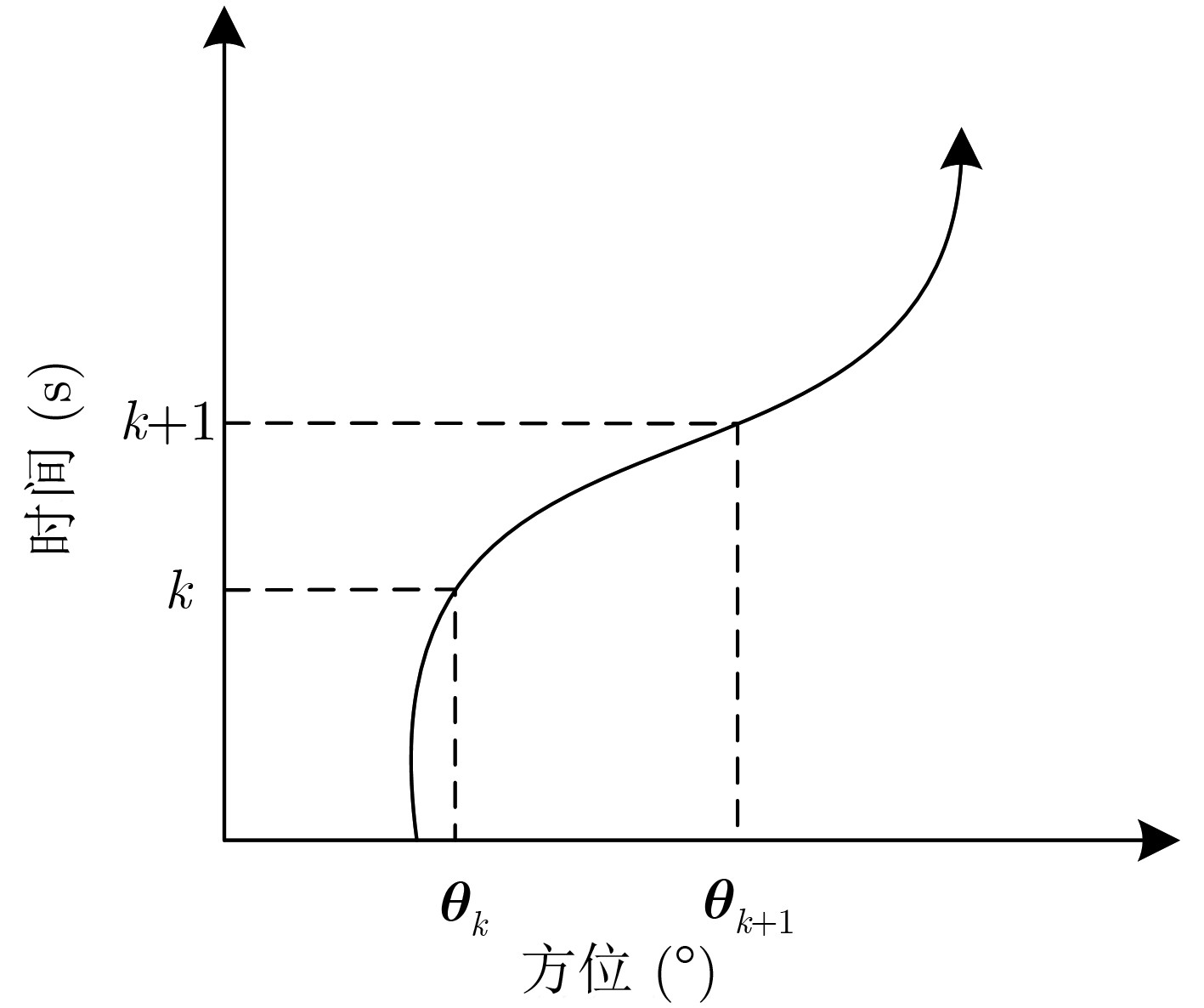
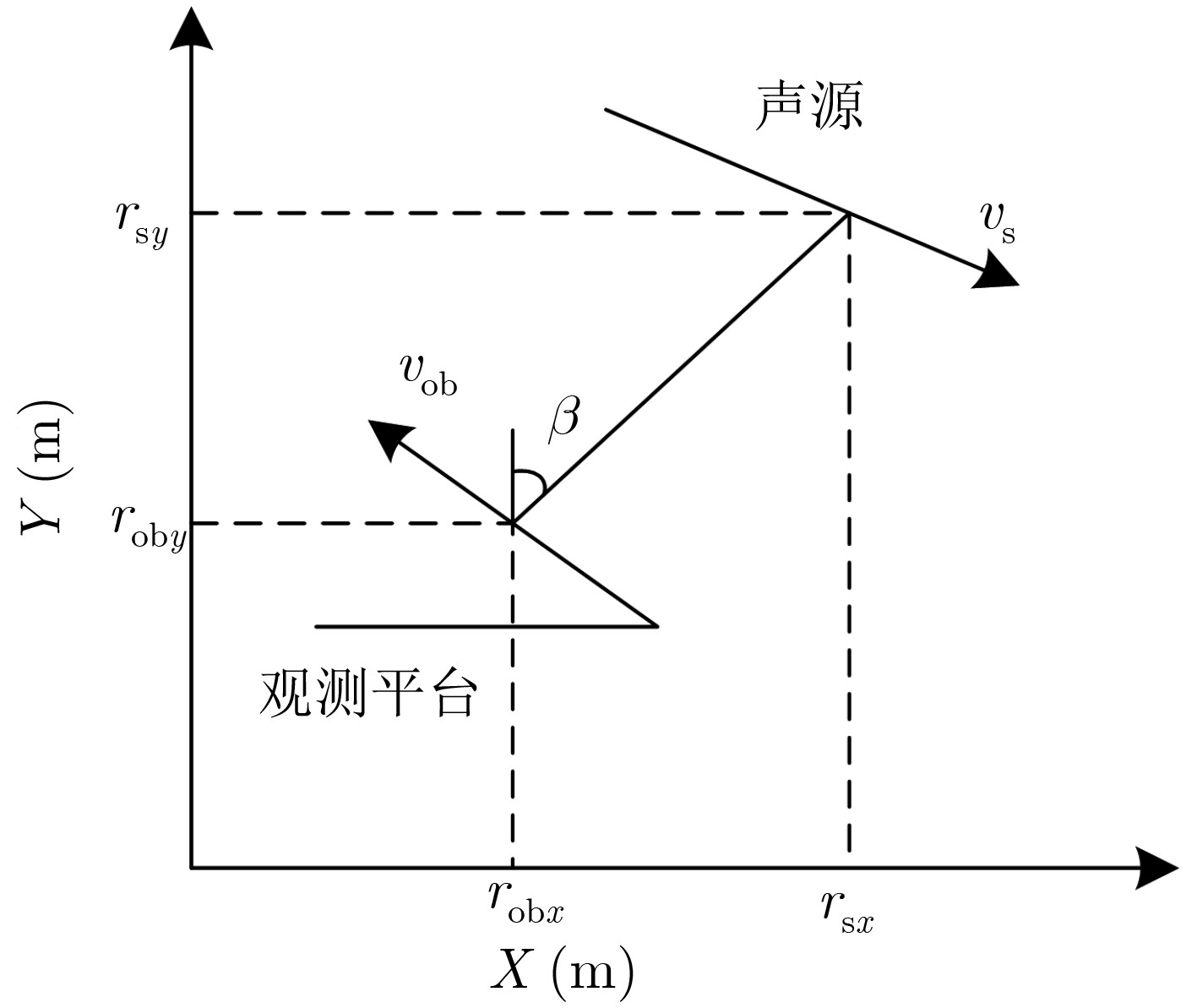
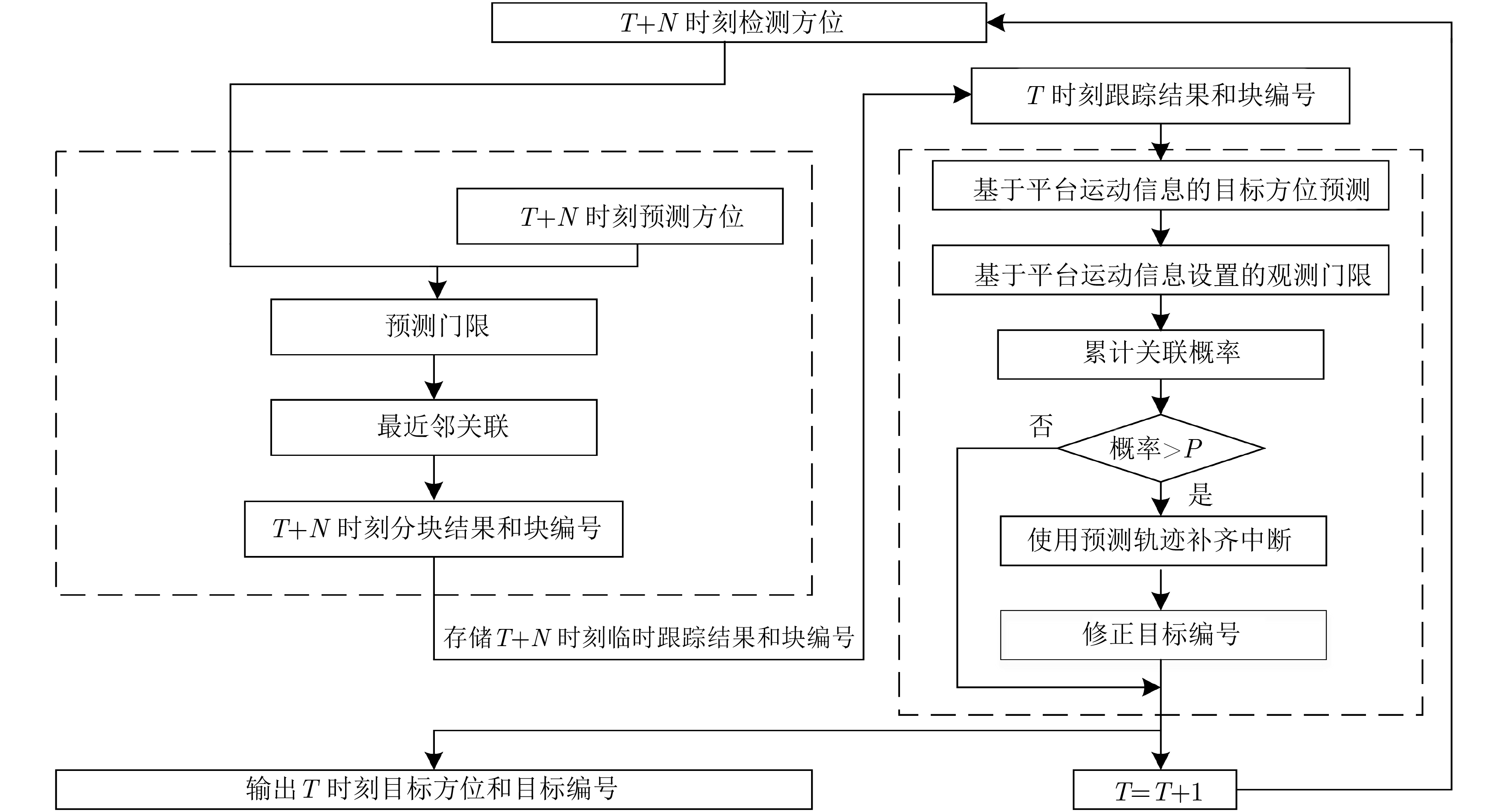
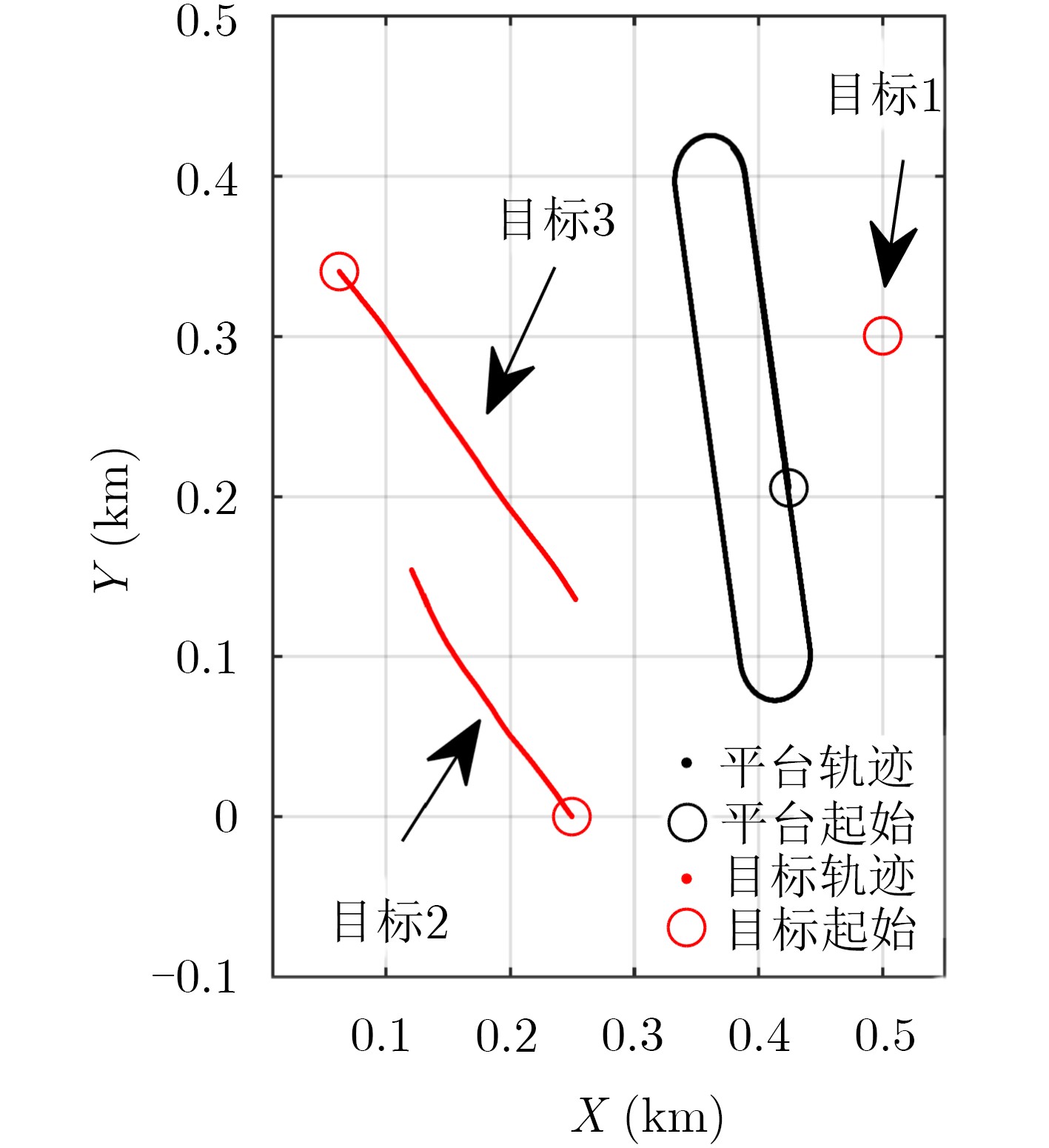
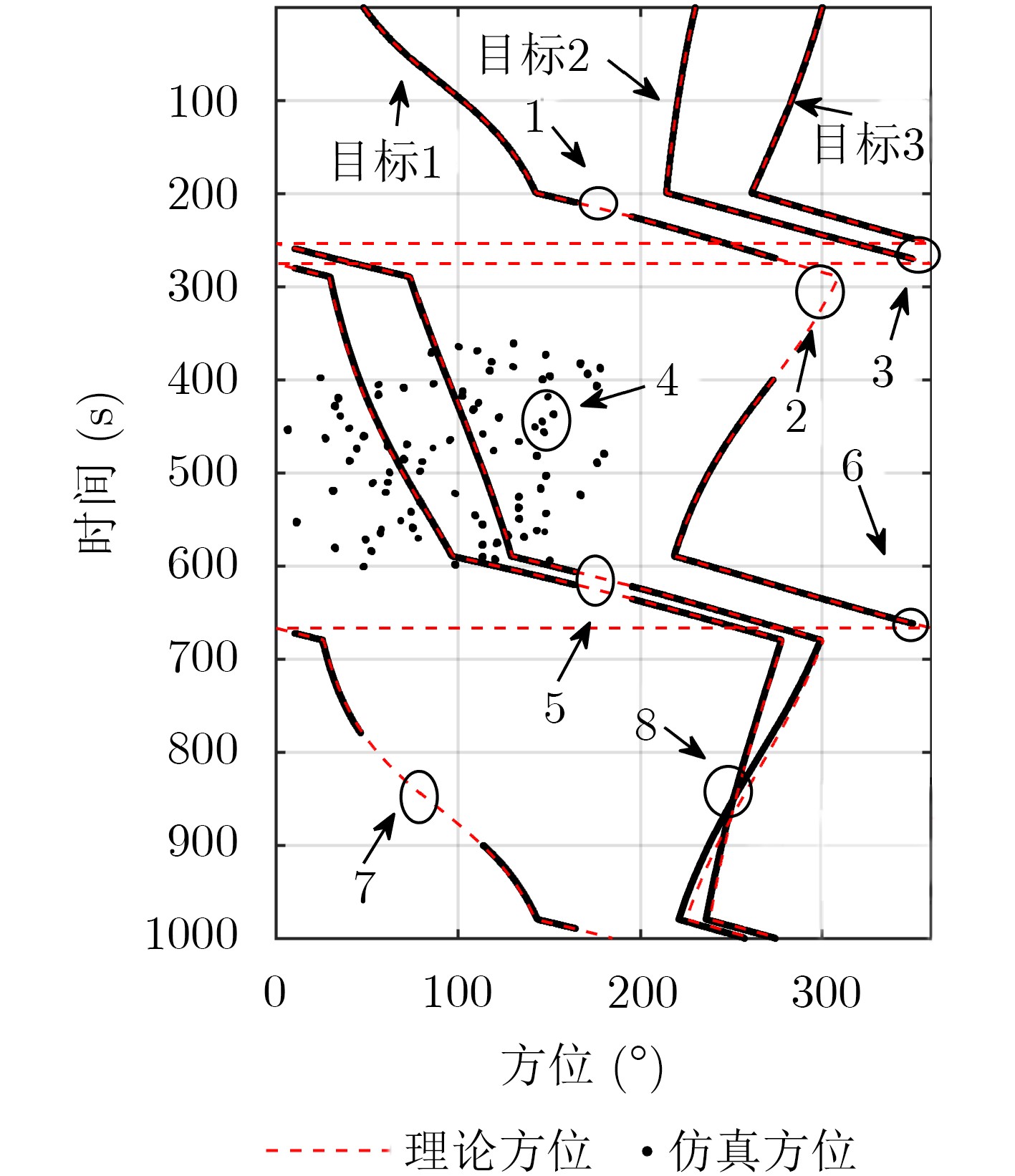
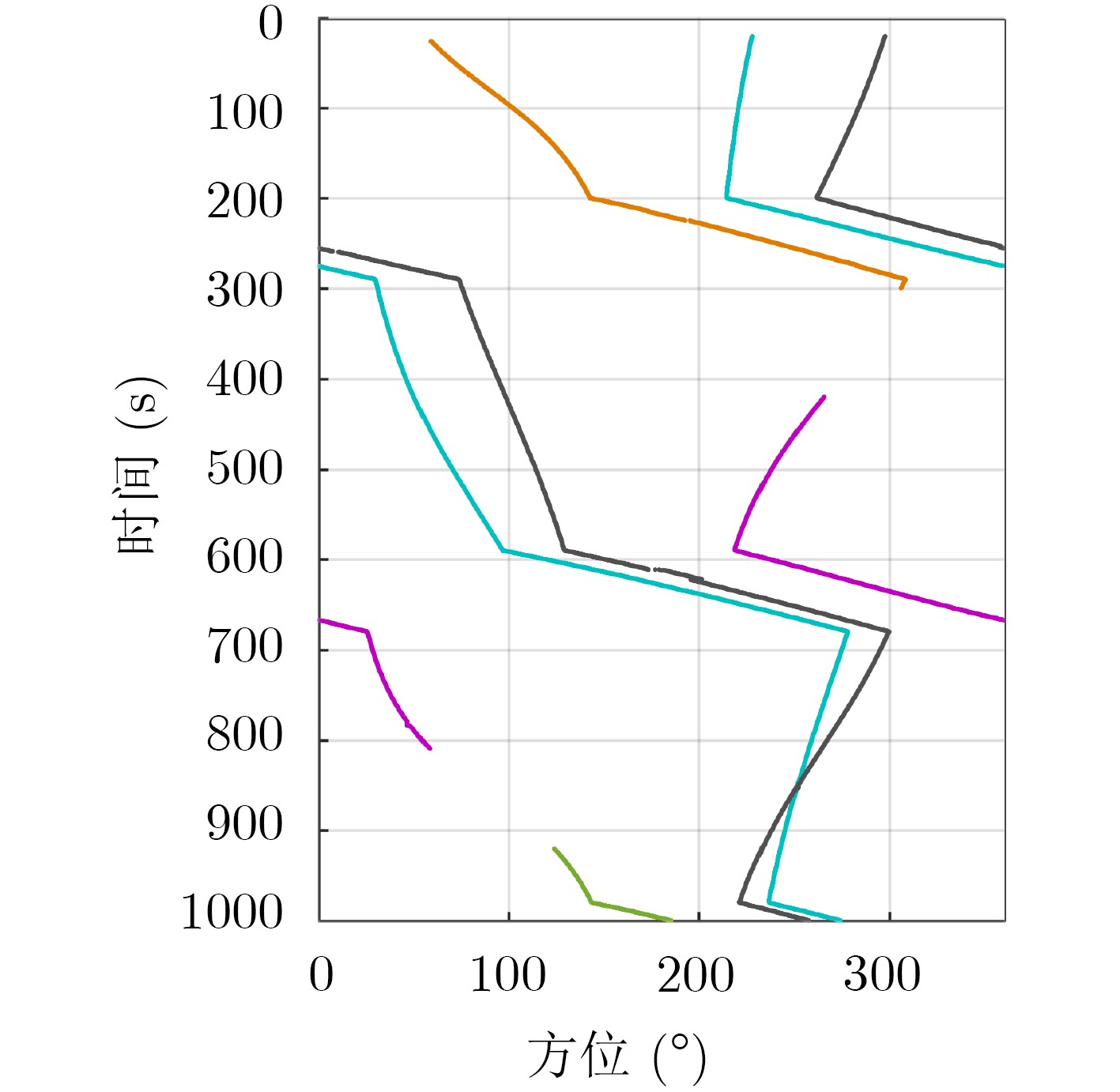
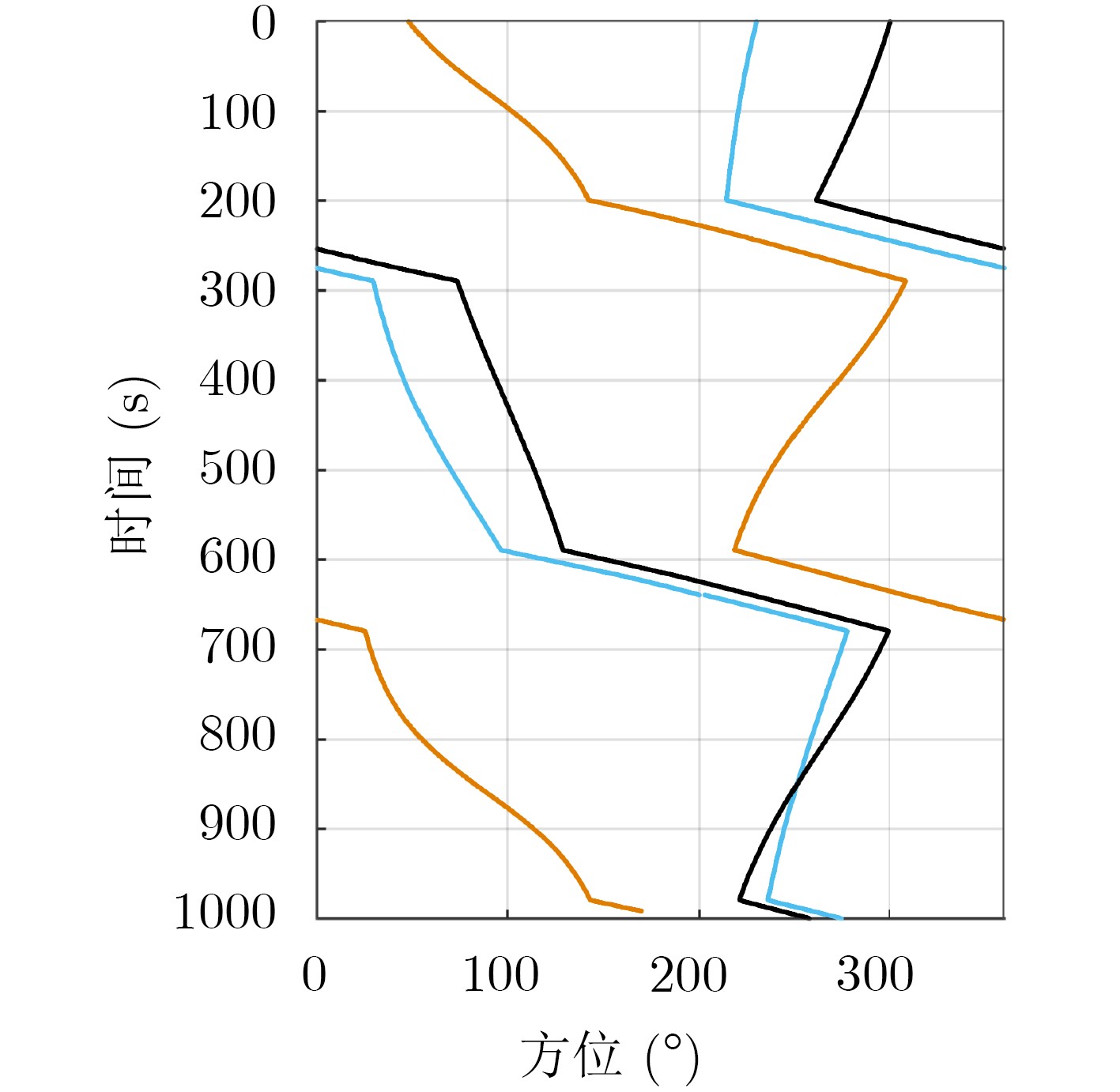
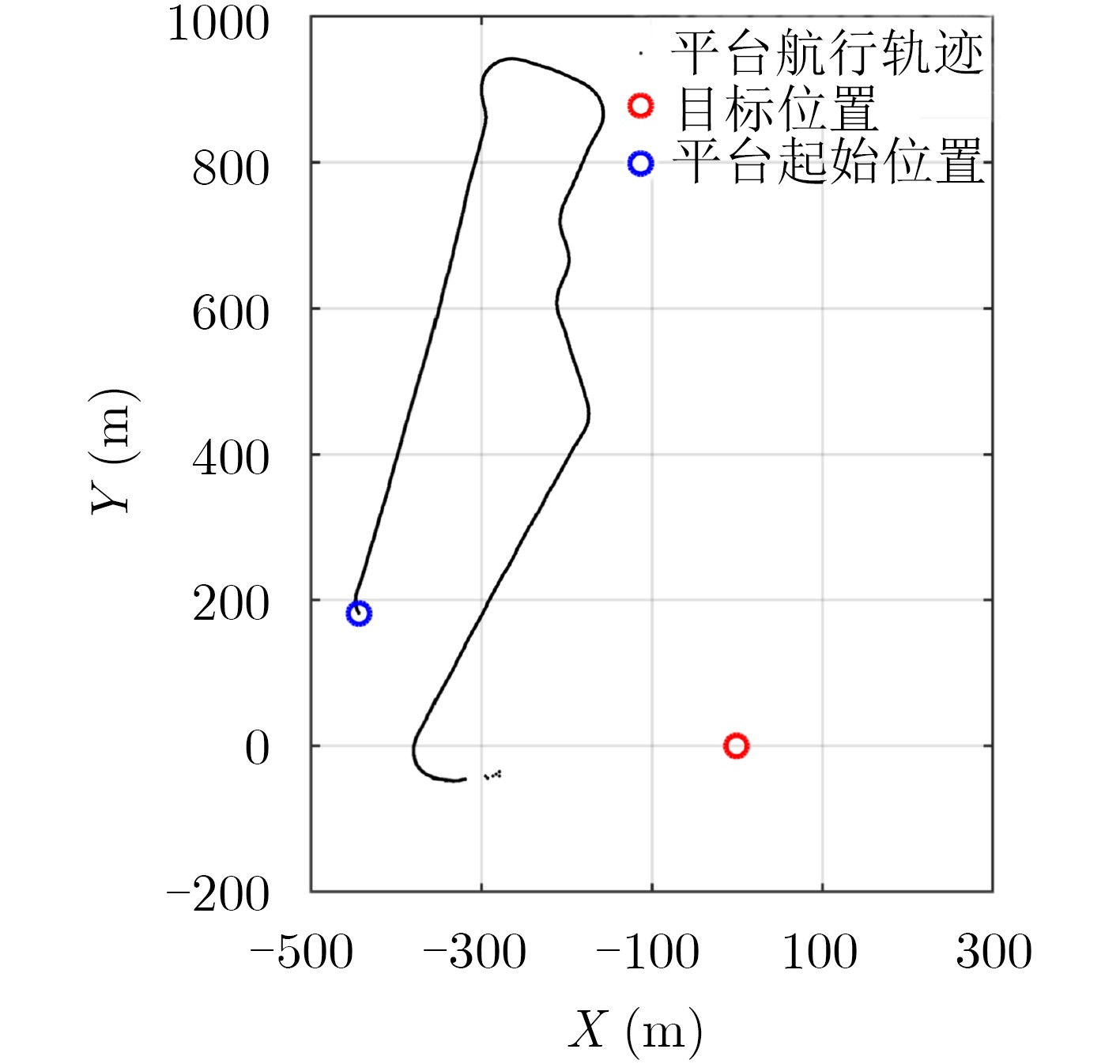
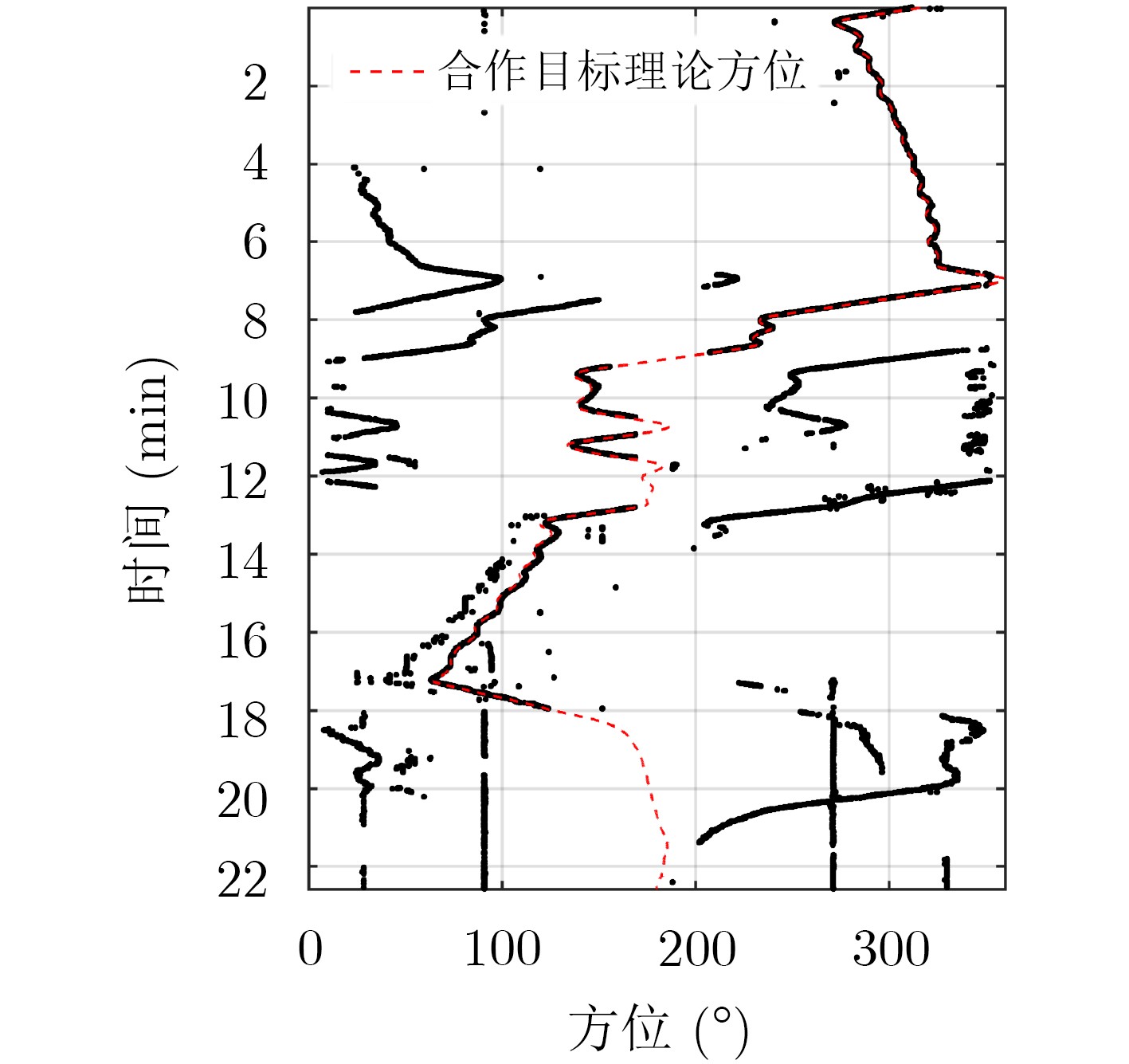
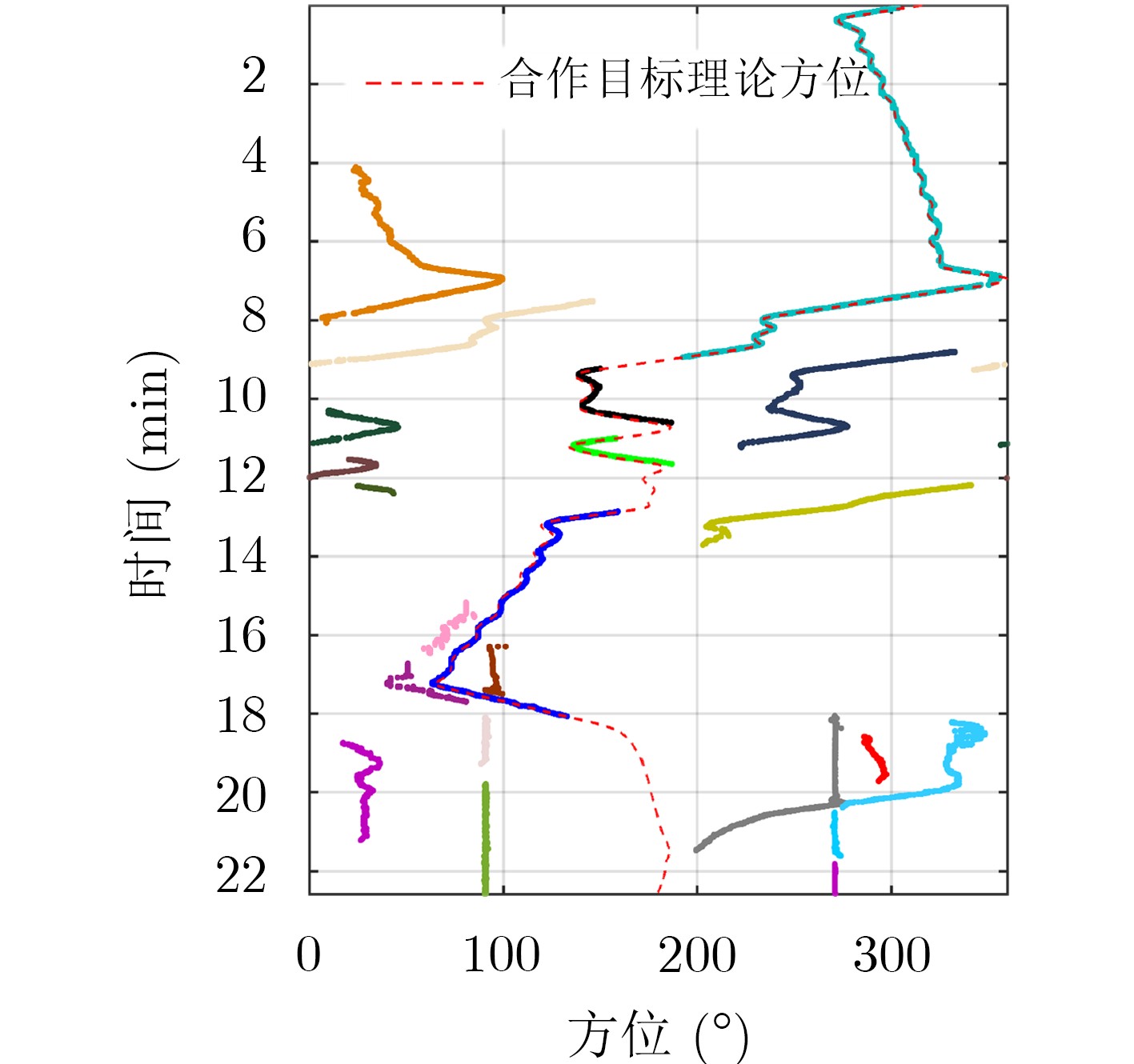
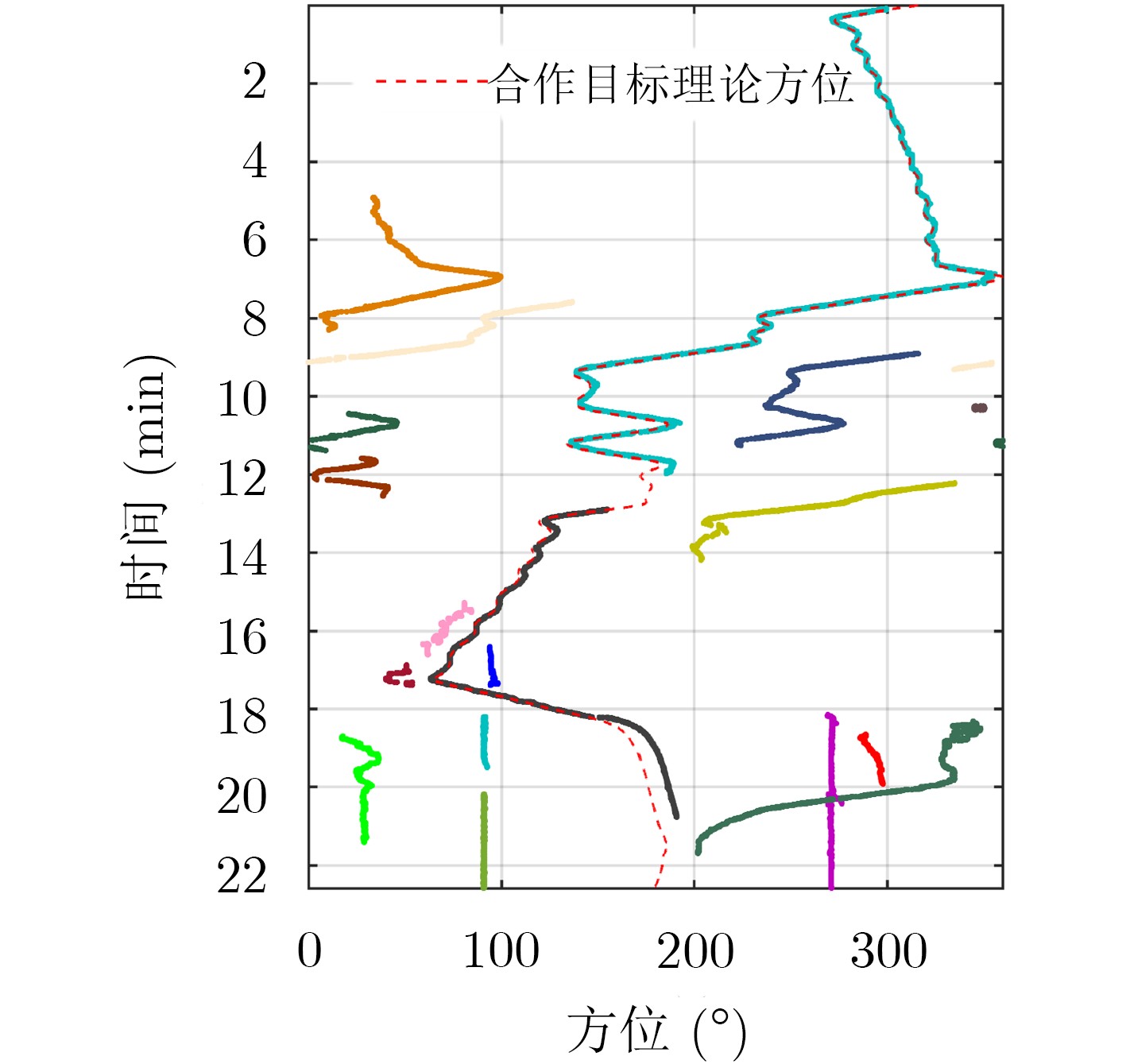
被动声呐信号处理中,致力于实现连续且稳定的目标方位跟踪。在复杂的水下环境中,由于干扰和噪声的存在,以及阵列孔径的限制,方位检测结果中不可避免地存在很多轨迹中断、野值、干扰与目标间的方位交叉。该文提出了一种基于水下无人航行器的多目标被动跟踪算法,使用基于航行器运动信息的粒子采样预测方法进行轨迹中断预测补齐,使用基于航行器运动信息的观测门限设置方法自适应设置跟踪门限,使用块关联跟踪方法进行轨迹中断关联和方位交叉关联。仿真和实验结果表明,该算法能够实现正确的多目标跟踪。
Abstract:In the passive tracking using acoustic arrays, continuous and stable tracking of targets is important. In complex underwater environments, there are inevitably many trajectory interruptions, outliers, interference and target azimuth crossings in the bearing detection results, due to interference, noise, and arrays aperture limitations. In this paper, a multi-target passive tracking algorithm based on unmanned underwater vehicle is proposed. The particle sampling prediction method based on the motion information of the vehicle is used to perform the interruption prediction. The observation threshold setting method based on the motion information of the vehicle is used to adaptively set the tracking threshold. The block association tracking method is used for association of trajectory break and azimuth cross. The experimental results show that the proposed algorithm achieves correct multi-target tracking.
-
表 1 检测概率和算法性能(%)
方位连续段
检测概率算法正确
跟踪概率方位连续段
检测概率算法正确
跟踪概率100 100.00 40 80.810 80 100.00 35 63.420 50 98.21 30 24.140 45 91.55 25 0.037  下载: 导出CSV
下载: 导出CSV
表 2 检测跟踪概率和平均方位误差统计结果
阈值检测 传统跟踪算法 VI-BOTA VIP-BOTA 检测跟踪概率(%) 64.85 69.67* 84.70* 92.62 平均方位误差(°) 1.54 1.59 3.12(1.47) 1.29
下载: 导出CSV
-
NORTHARDT T and NARDONE S C. Track-before-detect bearings-only localization performance in complex passive sonar scenarios: A case study[J]. IEEE Journal of Oceanic Engineering, 2019, 44(2): 482–491. doi: 10.1109/JOE.2018.2811419 BADRIASL L, ARULAMPALAM S, VAN DER HOEK J, et al. Bayesian WIV estimators for 3-D bearings-only TMA with speed constraints[J]. IEEE Transactions on Signal Processing, 2019, 67(13): 3576–3591. doi: 10.1109/TSP.2019.2917863 DIAMANT R, KIPNIS D, BIGAL E, et al. An active acoustic track-before-detect approach for finding underwater mobile targets[J]. IEEE Journal of Selected Topics in Signal Processing, 2019, 13(1): 104–119. doi: 10.1109/JSTSP.2019.2899237 李子高, 李淑秋, 闻疏琳. 基于无人平台的水下目标自动检测方法[J]. 哈尔滨工程大学学报, 2017, 38(1): 103–108. doi: 10.11990/jheu.201601012LI Zigao, LI Shuqiu, and WEN Shulin. Automatic detection of an underwater target based on UUV[J]. Journal of Harbin Engineering University, 2017, 38(1): 103–108. doi: 10.11990/jheu.201601012 金盛龙, 李宇, 黄海宁. 曲线机动情况下水下自主平台的改进被动合成孔径算法研究[J]. 电子与信息学报, 2018, 40(9): 2265–2272. doi: 10.11999/JEIT171225JIN Shenglong, LI Yu, and HUANG Haining. An improved passive synthetic aperture algorithm based on curvilinear maneuverability of autonomous underwater vehicles[J]. Journal of Electronics &Information Technology, 2018, 40(9): 2265–2272. doi: 10.11999/JEIT171225 NIAZI S and TOLOEI A. Estimation of LOS rates for target tracking problems using EKF and UKF algorithms-a comparative study[J]. International Journal of Engineering, Transactions B: Applications, 2015, 28(2): 172–179. doi: 10.5829/idosi.ije.2015.28.02b.02 JULIER S J and UHLMANN J K. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004, 92(3): 401–422. doi: 10.1109/JPROC.2003.823141 SADHU S, MONDAL S, SRINIVASAN M, et al. Sigma point Kalman filter for bearing only tracking[J]. Signal Processing, 2006, 86(12): 3769–3777. doi: 10.1016/j.sigpro.2006.03.006 DOĞANÇAY K. On the bias of linear least squares algorithms for passive target localization[J]. Signal Processing, 2004, 84(3): 475–486. doi: 10.1016/j.sigpro.2003.12.002 VAN DER MERWE R and WAN E A. The square-root unscented Kalman filter for state and parameter-estimation[C]. 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing, Salt Lake City, USA, 2001: 3461–3464. doi: 10.1109/ICASSP.2001.940586. BREHARD T and LE CADRE J P. Hierarchical particle filter for bearings-only tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1567–1585. doi: 10.1109/TAES.2007.4441759 YARDIM C, MICHALOPOULOU Z H, and GERSTOFT P. An overview of sequential Bayesian filtering in ocean acoustics[J]. IEEE Journal of Oceanic Engineering, 2011, 36(1): 71–89. doi: 10.1109/JOE.2010.2098810 张颖, 高灵君. 基于格拉布斯准则和改进粒子滤波算法的水下传感网目标跟踪[J]. 电子与信息学报, 2019, 41(10): 2294–2301. doi: 10.11999/JEIT190079ZHANG Ying and GAO Lingjun. Target tracking with underwater sensor networks based on Grubbs criterion and improved particle filter algorithm[J]. Journal of Electronics &Information Technology, 2019, 41(10): 2294–2301. doi: 10.11999/JEIT190079 XIONG Zhengda, XU Ke, CHEN Yong, et al. Research on multi-target bearings-only tracking method based on passive sonar systems[C]. The 2nd IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 2017: 1326–1330. doi: 10.1109/IAEAC.2017.8054229. WANG Yujie, LI Yu, JU Donghao, et al. Continuous bearings-only tracking based on vehicle motion information correction[C]. OCEANS 2019-Marseille, Marseille, France, 2019: 1–5. doi: 10.1109/OCEANSE.2019.8867274. -

 下载:
下载:





计量
- 文章访问数: 3673
- HTML全文浏览量: 2054
- PDF下载量: 171
- 被引次数: 0
