

Robust Altitude Estimation Based on Spatial Sign Transform in the Presence of Diffuse Multipath for Very High Frequency Radar
-
摘要:
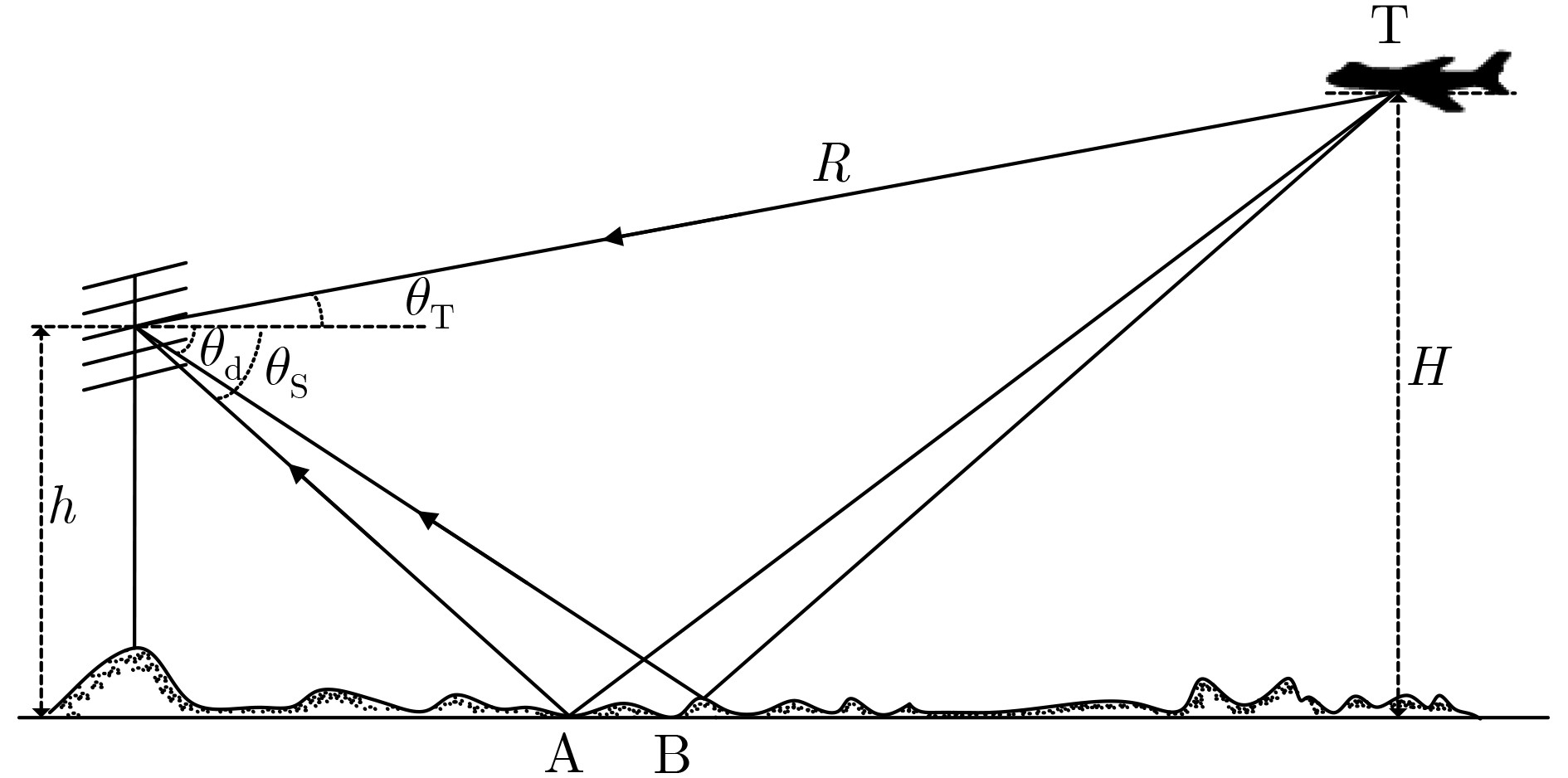
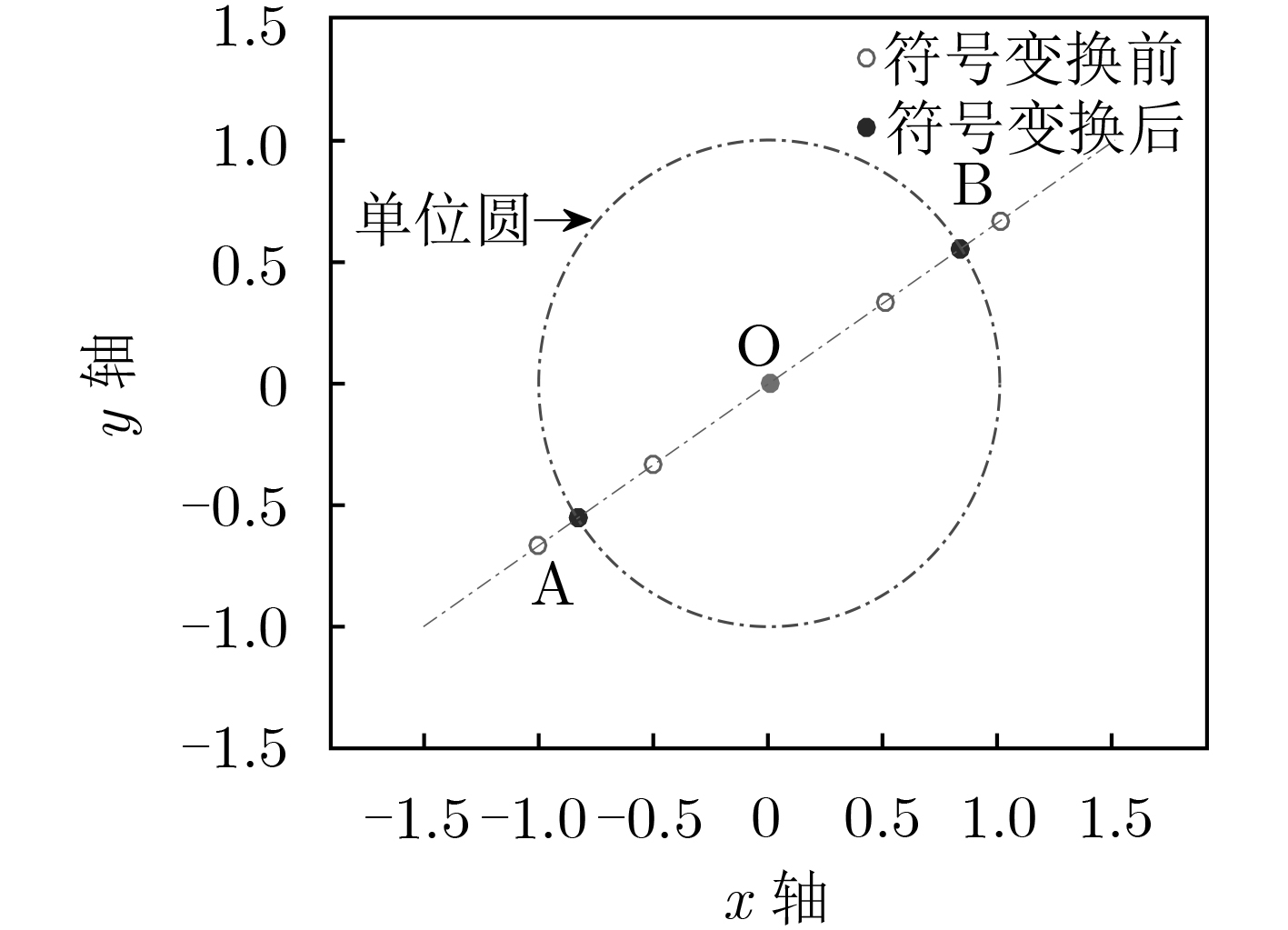
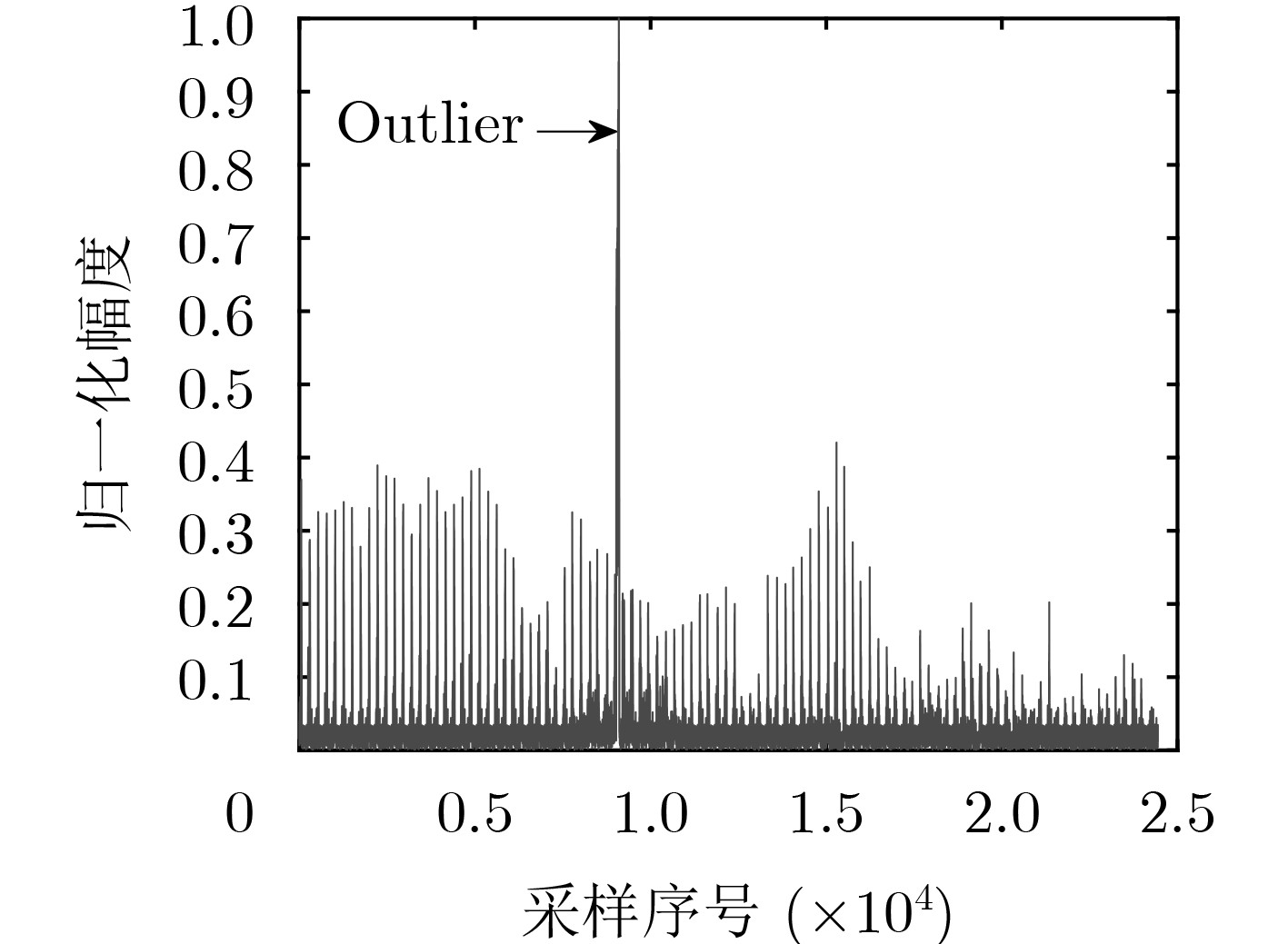
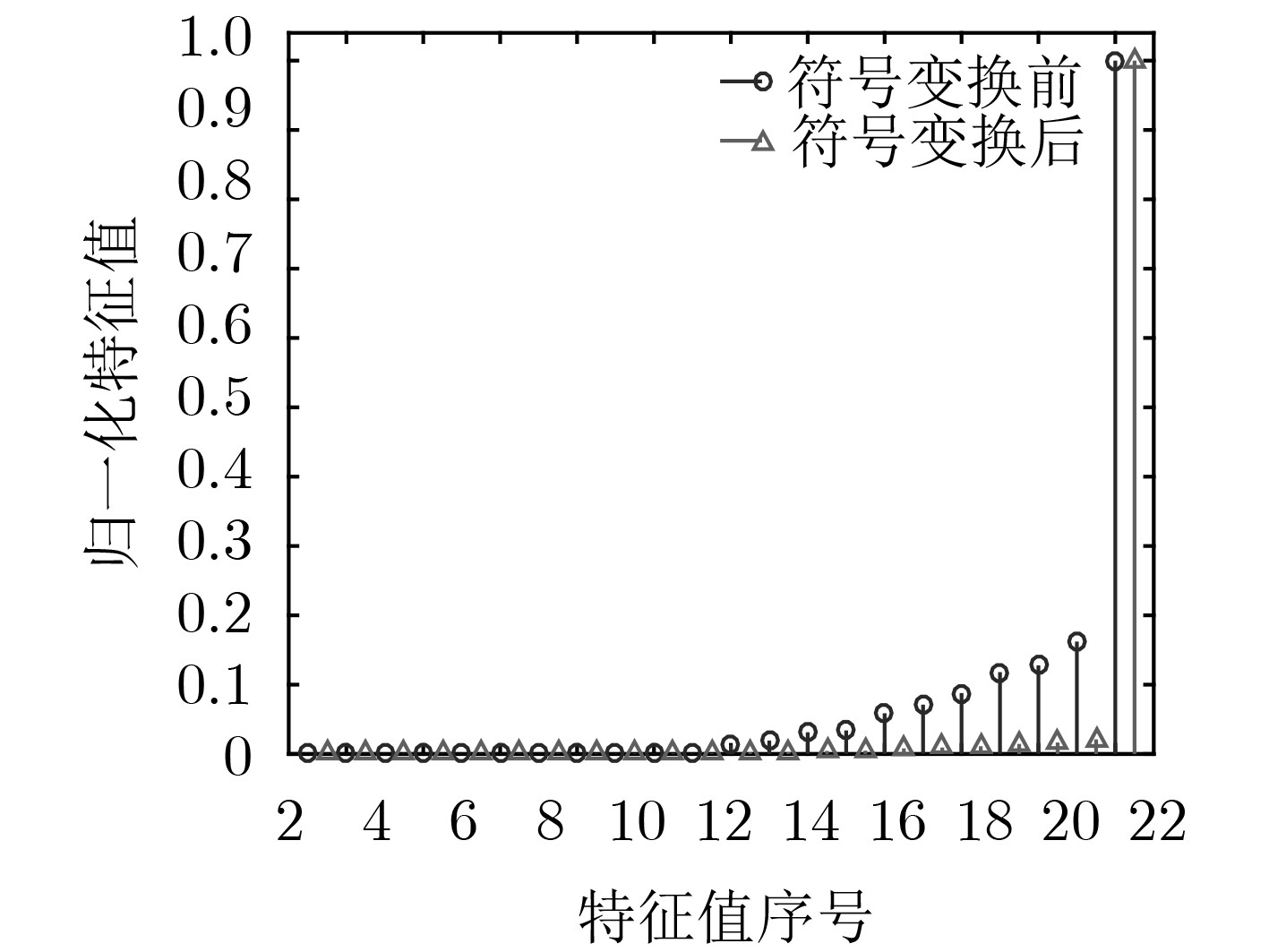
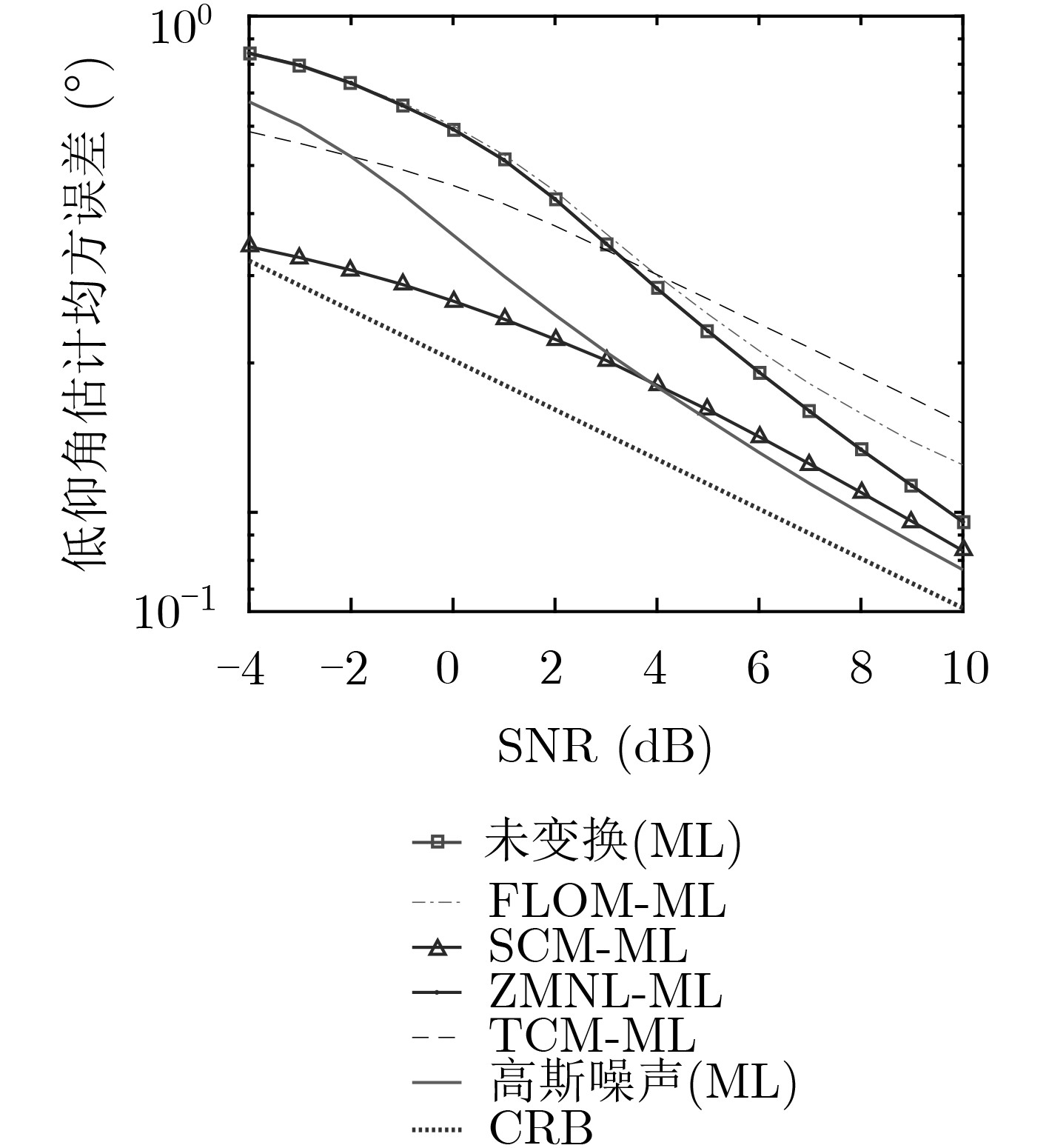
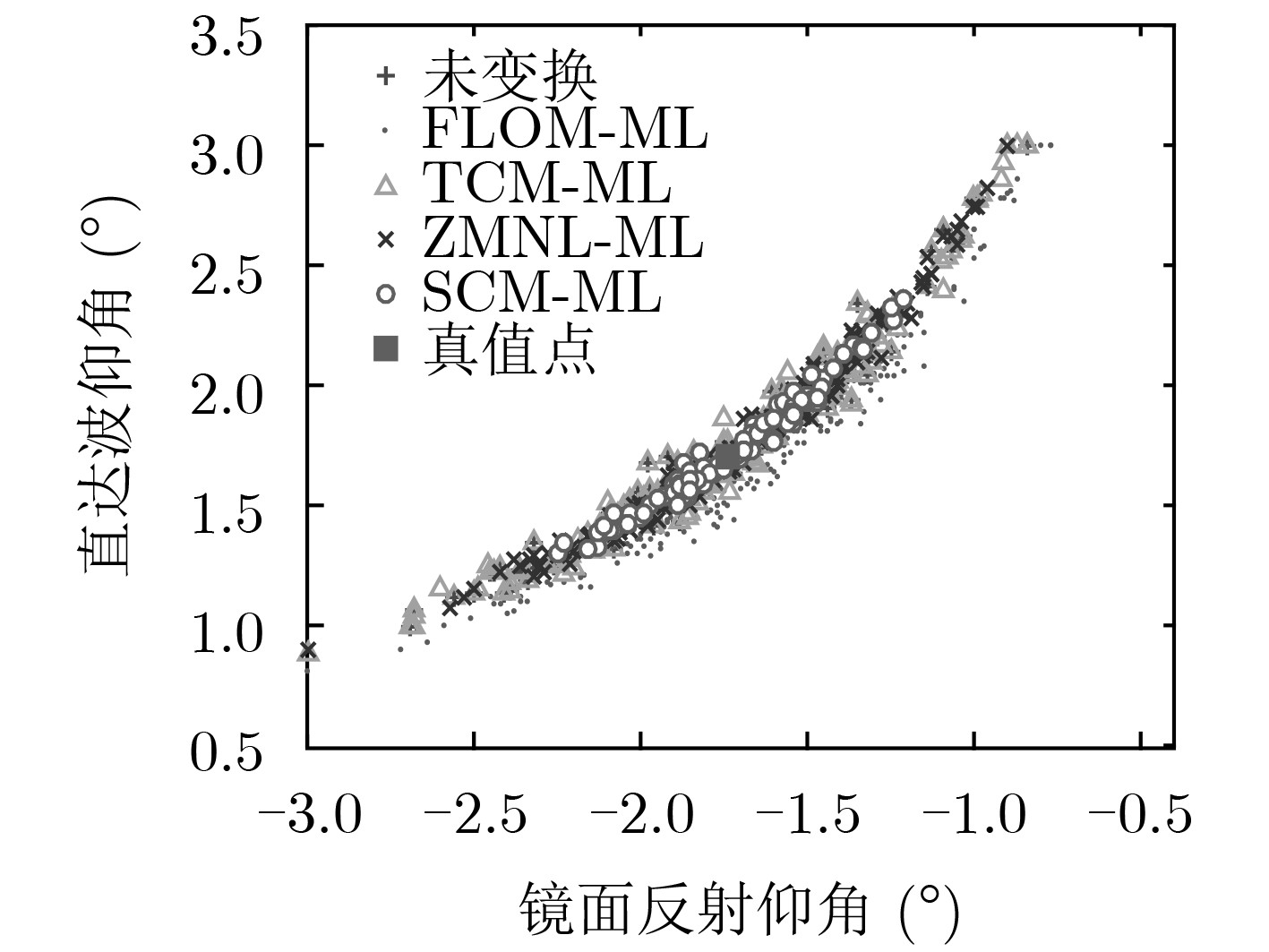
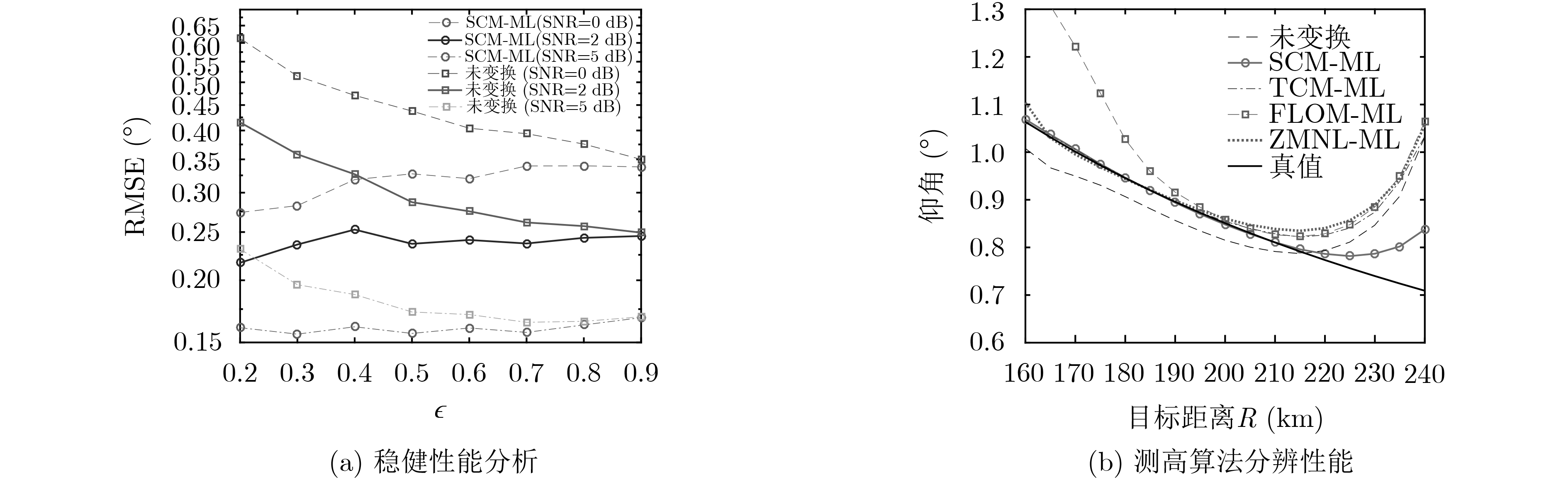
针对米波(VHF)雷达的复杂多径信号中散射分量的非高斯性严重影响测高的稳定性,该文提出了稳健的空域符号变换最大似然测高算法。该算法先对多维阵列快拍矢量进行空域符号变换处理,以抑制散射分量野值点对阵列协方差矩阵及其测高算法的影响,再计算符号协方差矩阵(SCM),然后根据符号协方差矩阵的映射等效性和特征空间不变性,将符号协方差矩阵应用到最大似然(SCM-ML)测高算法中,实现了稳健的米波雷达低角测高。该算法有效抑制了多径信号中散射分量和波束打地形成的强杂波的非高斯性,提高了米波雷达低角测高的稳健性。仿真结果和实测数据验证了算法的稳健性与有效性。
Abstract:A robust spatial sign transform-based maximum likelihood method for low-elevation target altitude measurement is proposed in the presence of the non-Gaussian diffuse multipath component for Very High Frequency (VHF) radar. The spatial sign transform is implemented to the antenna array snapshots, reducing the influence of the outliers on array covariance matrix and the low elevation estimation algorithms, followed by computing the spatial Sign Covariance Matrix(SCM). Then the application of SCM to the Maximum Likelihood method(SCM-ML) is presented on the basis of the affine equivalence and preservation of the eigenstructure for robust low elevation estimation and height finding of VHF radar. The proposed method effectively solves the non-Gaussian property of the diffuse multipath component and improves the robustness of low elevation estimation. Simulation result and real data demonstrate the robustness and validation of the SCM-ML method.
-
BALAJTI I, KENDE G, and SINNER E. Increased importance of VHF radars in ground-based air defense[J]. IEEE Aerospace and Electronic Systems Magazine, 2012, 27(1): 4–18. doi: 10.1109/MAES.2012.6145436 郑轶松, 陈伯孝. 米波雷达低仰角目标多径模型及其反演方法研究[J]. 电子与信息学报, 2016, 38(6): 1468–1474. doi: 10.11999/JEIT151013ZHENG Yisong and CHEN Baixiao. Multipath model and inversion method for low-angle target in very high frequency radar[J]. Journal of Electronics &Information Technology, 2016, 38(6): 1468–1474. doi: 10.11999/JEIT151013 LI Cunxu, CHEN Baixiao, ZHENG Yisong, et al. Altitude measurement of low elevation target in complex terrain based on orthogonal matching pursuit[J]. IET Radar, Sonar & Navigation, 2017, 11(5): 745–751. doi: 10.1049/iet-rsn.2016.0468 BARTON D K. Radar Equations for Modern Radar[M]. Boston: Artech House, 2012: 80–82. EZUMA M, OZDEMIR O, ANJINAPPA C K, et al. Micro-UAV detection with a low-grazing angle Millimeter wave radar[C]. 2019 IEEE Radio and Wireless Symposium, Orlando, USA, 2019: 1–4. doi: 10.1109/RWS.2019.8714203. RAYMAEKERS J and ROUSSEEUW P. A generalized spatial sign covariance matrix[J]. Journal of Multivariate Analysis, 2019, 171: 94–111. doi: 10.1016/j.jmva.2018.11.010 HAYKIN S. Adaptive Radar Signal Processing[M]. Hoboken: Wiley & Sons, 2006: 1–60. BILLINGSLEY J B. Low-angle Radar Land Clutter: Measurements and Empirical Models[M]. Norwich, NY: William Andrew Publishing, 2002: 300–350. SHAGHAGHI M and VOROBYOV S A. Subspace leakage analysis and improved DOA estimation with small sample size[J]. IEEE Transactions on Signal Processing, 2015, 63(12): 3251–3265. doi: 10.1109/TSP.2015.2422675 AUGUIN N, MORALES-JIMENEZ D, MCKAY M R, et al. Large-dimensional behavior of regularized Maronna’s M-estimators of covariance matrices[J]. IEEE Transactions on Signal Processing, 2018, 66(13): 3259–3272. doi: 10.1109/TSP.2018.2831629 LIU T H and MENDEL J M. A subspace-based direction finding algorithm using fractional lower order statistics[J]. IEEE Transactions on Signal Processing, 2001, 49(8): 1605–1613. doi: 10.1109/78.934131 VISURI S, OJA H, and KOIVUNEN V. Subspace-based direction-of-arrival estimation using nonparametric statistics[J]. IEEE Transactions on Signal Processing, 2001, 49(9): 2060–2073. doi: 10.1109/78.942634 KOZICK R J and SADLER B M. Maximum-likelihood array processing in non-Gaussian noise with Gaussian mixtures[J]. IEEE Transactions on Signal Processing, 2000, 48(12): 3520–3525. doi: 10.1109/78.887045 HAMPEL F R, RONCHETTI E M, ROUSSEEUW P J, et al. Robust Statistics: The Approach Based on Influence Functions[M]. New York, USA: John Wiley & Sons Inc., 1986: 275–276. BAKTASH E, KARIMI M, and WANG Xiaodong. Maximum-likelihood direction finding under elliptical noise using the EM algorithm[J]. IEEE Communications Letters, 2019, 23(6): 1041–1044. doi: 10.1109/LCOMM.2019.2911518 PAN Yan, DUAN Fabing, CHAPEAU-BLONDEAU F, et al. Noise enhancement in robust estimation of location[J]. IEEE Transactions on Signal Processing, 2018, 66(8): 1953–1966. doi: 10.1109/TSP.2018.2802463 -

 下载:
下载:


计量
- 文章访问数: 4049
- HTML全文浏览量: 1164
- PDF下载量: 85
- 被引次数: 0
