

Efficient Search Method for IoT Entities with Similarity Adaptive Estimation
-
摘要:
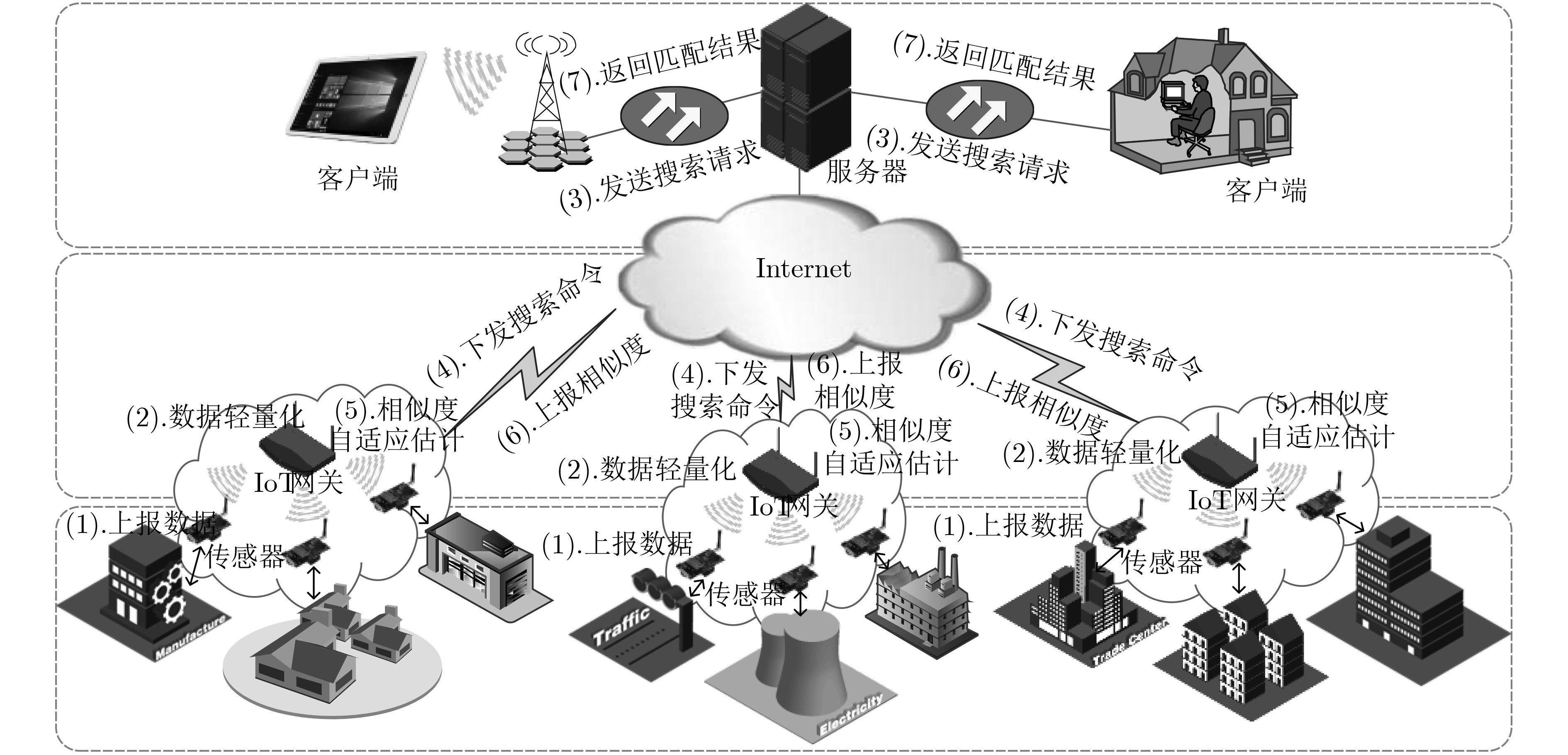
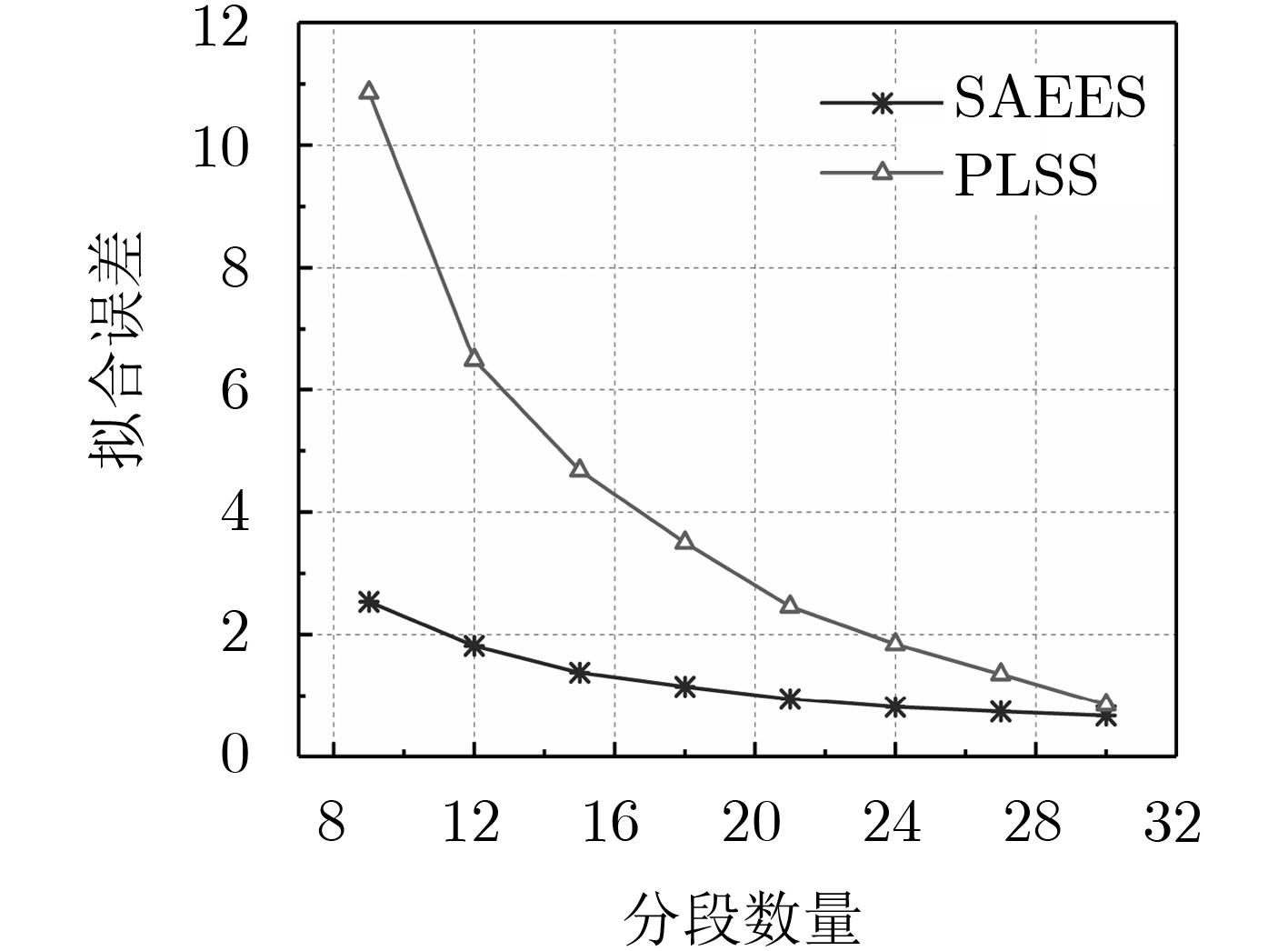
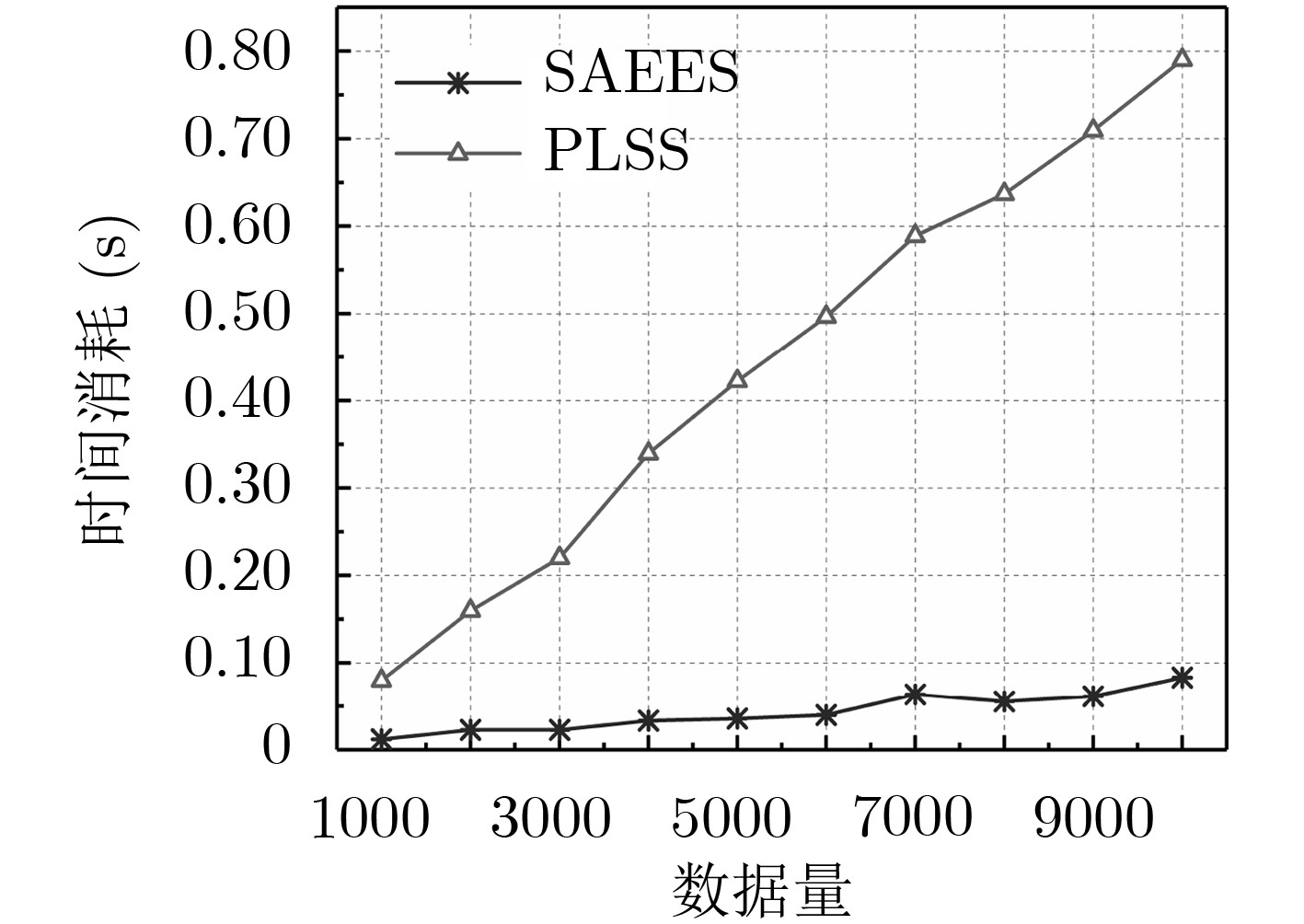
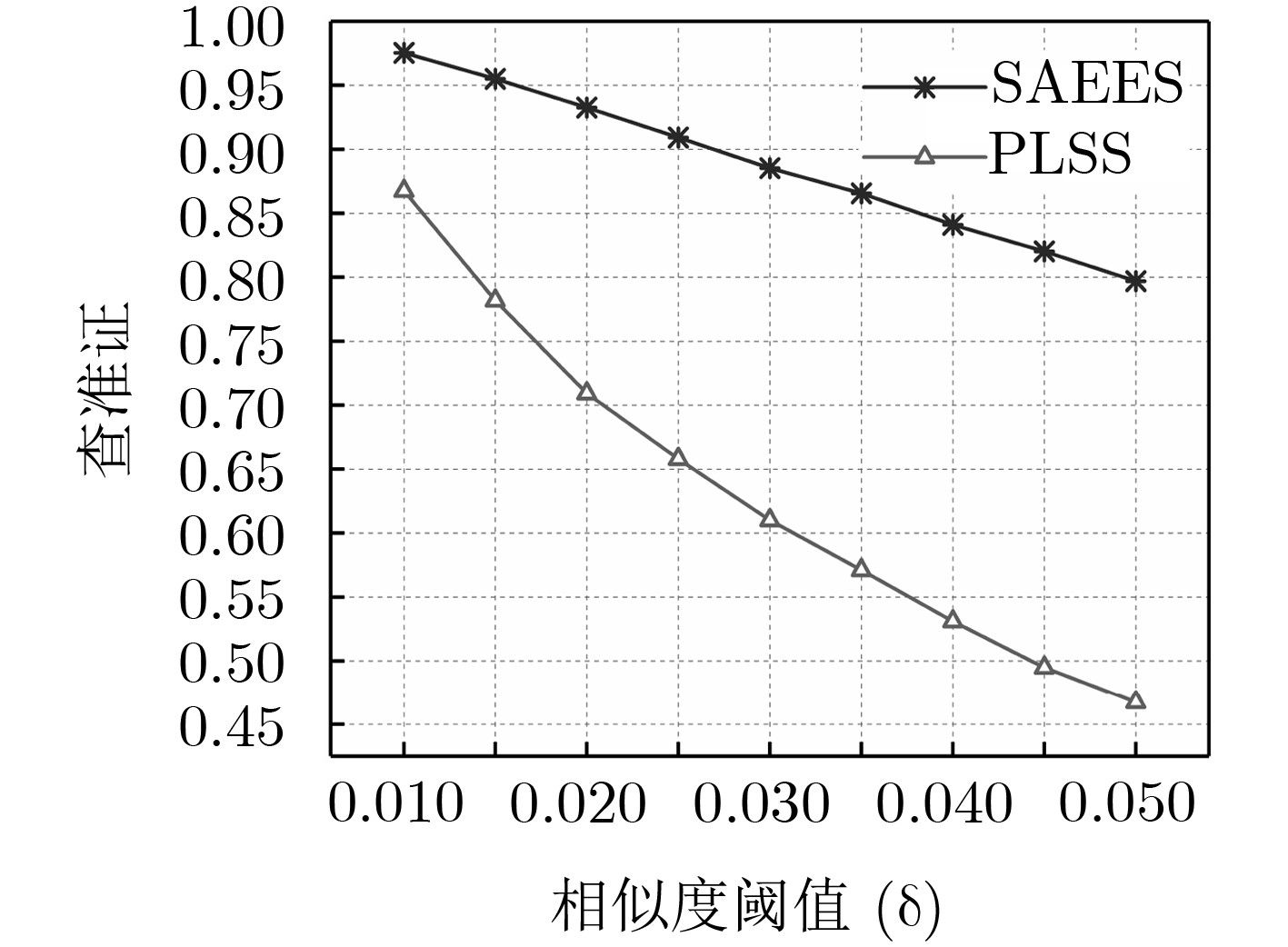
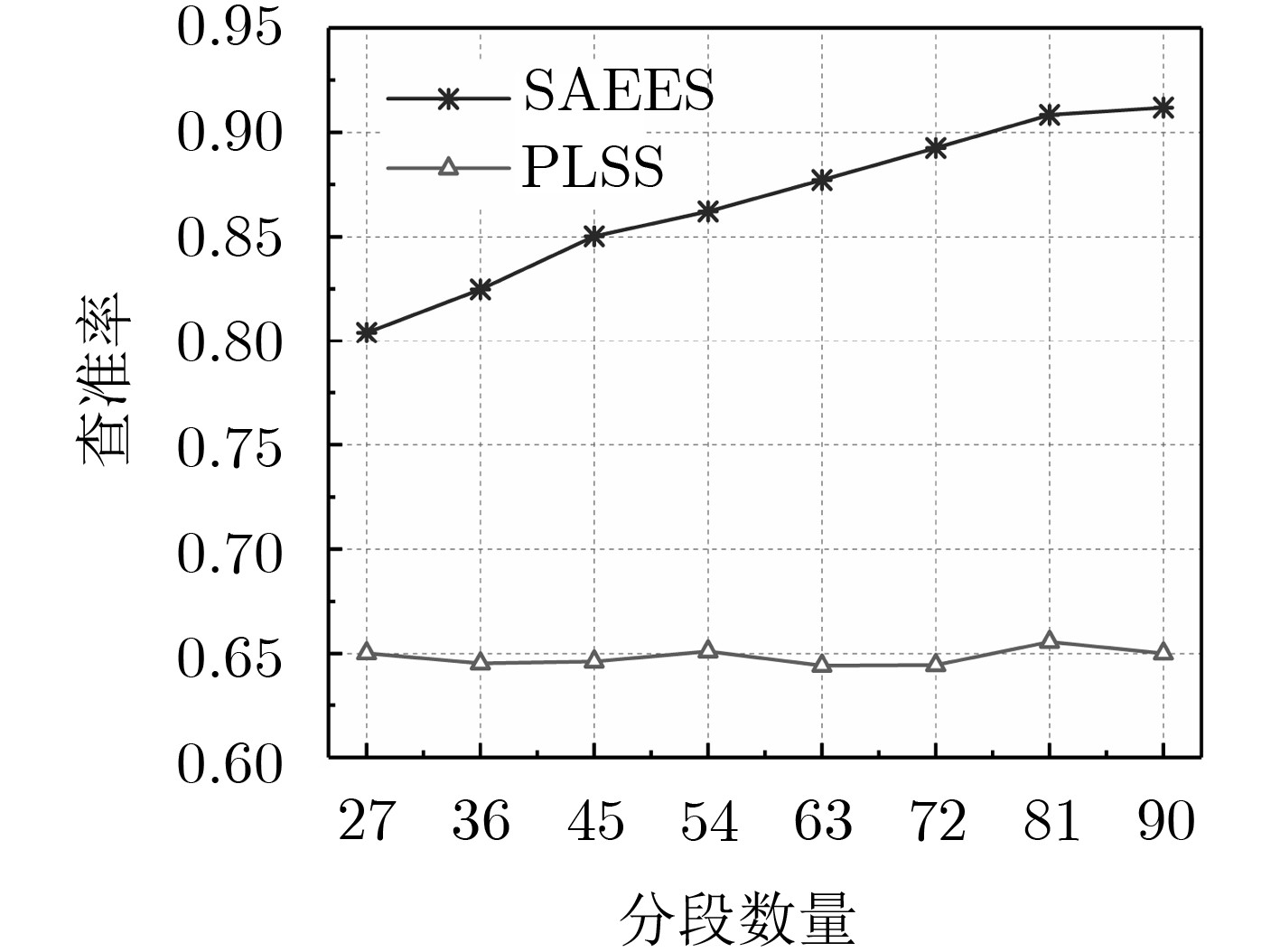
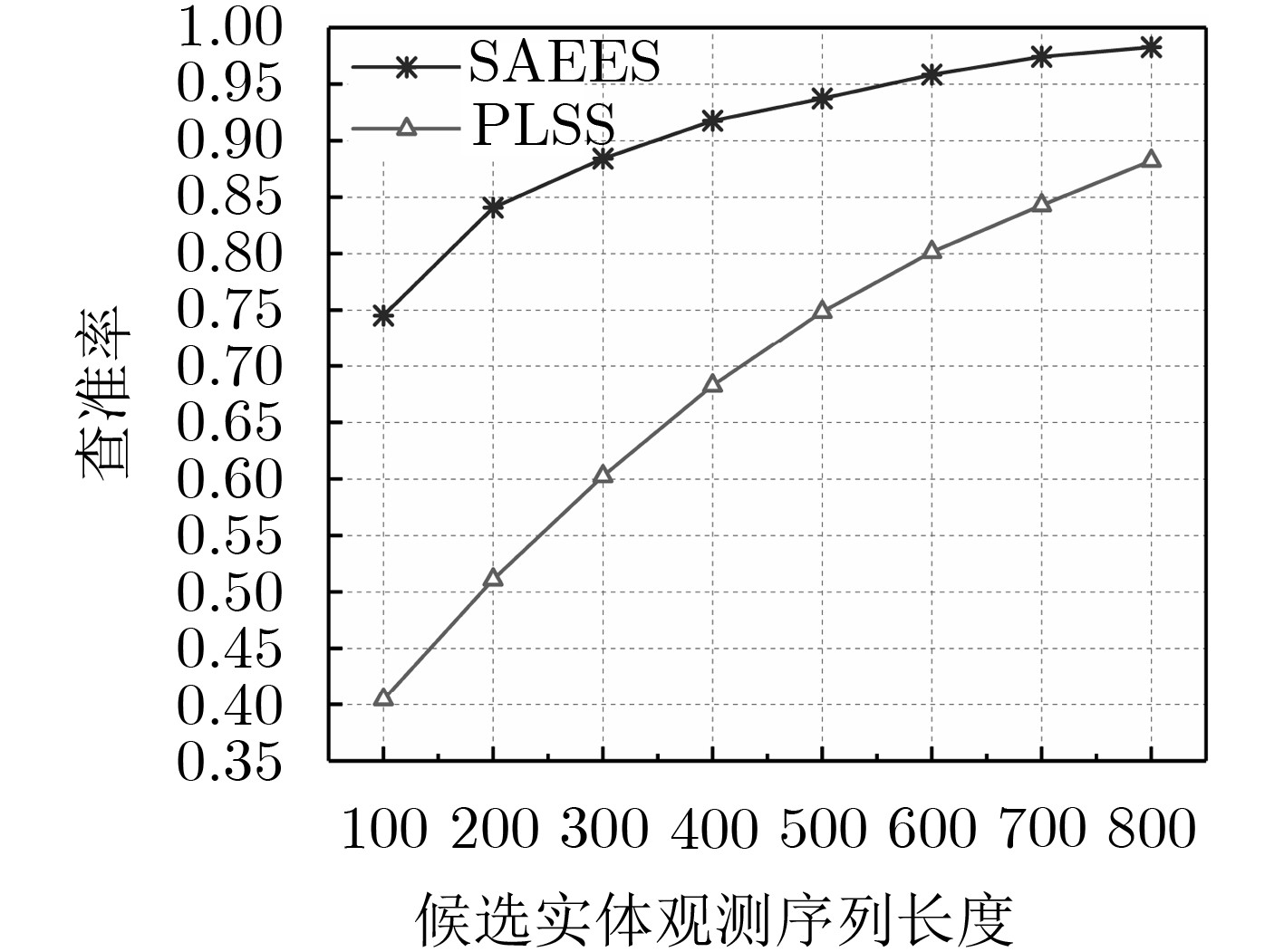
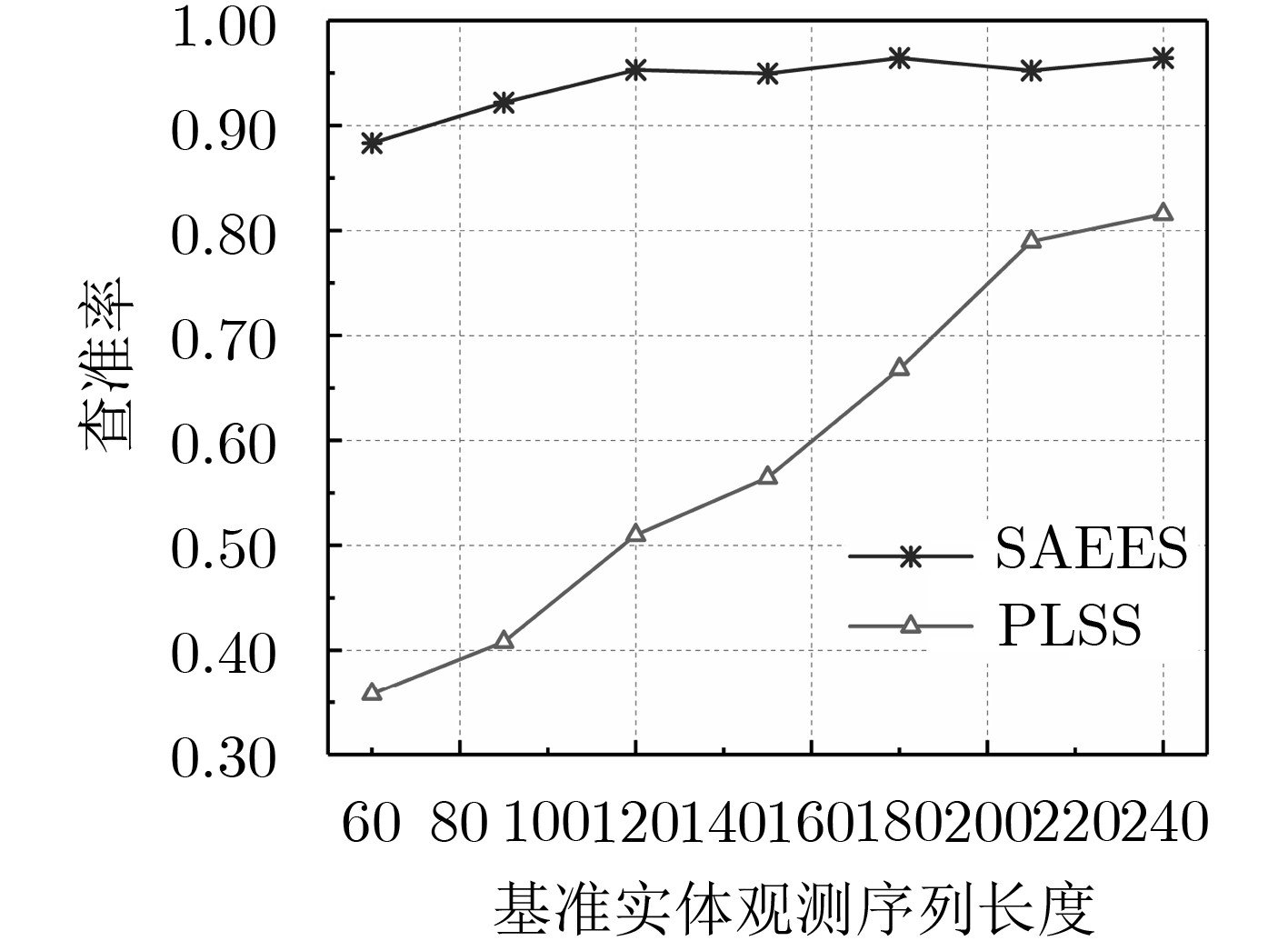
针对现有相似实体搜索方法缺乏对于观测序列长度的自适应性,且搜索过程数据存储开销过大,搜索结果准确性较低的问题,该文提出相似度自适应估计的物联网实体高效搜索方法(SAEES)。首先,设计了轻量级观测序列分段表示方法,对传感器采集的实体原始观测序列进行轻量级分段压缩表示,以降低实体观测序列的存储开销。然后,提出了观测序列相似度自适应估计方法,实现对不同观测序列长度的实体相似性的准确估计。最后,设计了高效的相似实体搜索匹配方法,依据所估计的实体相似度进行实体的准确搜索匹配。仿真结果表明,所提方法可大幅提高相似实体搜索的效率。
Abstract:The existing similar entity search method has poor adaptability to the length of the observed sequence, and the data storage overhead in the search process is too large, and the accuracy of the search result is insufficient. To this end, an efficient search method is proposed for the IoT Entity Search with Similarity Adaptive Estimation (SAEES). Firstly, in order to reduce the storage overhead of the entity observation sequence, a lightweight method of segmentation representation of the observation sequence is designed to perform a lightweight segmentation compression representation of the original observation sequence of the entity collected by the sensor. Then, in order to achieve an accurate estimation of the similarity of entities with different observation sequence lengths, an adaptive estimation method for observation sequence similarity is proposed. Finally, by exploiting the designed efficient similar entity search matching method, the exact search matching of the entity is completed according to the estimated entity similarity. The simulation results show that the proposed method can greatly improve the efficiency of similar entity search.
-
Key words:
- Internet of Things (IoT) /
- Entity search /
- Similarity /
- Adaptive estimation
-
WU Dapeng, SHI Hang, WANG Honggang, et al. A feature-based learning system for internet of things applications[J]. IEEE Internet of Things Journal, 2019, 6(2): 1928–1937. doi: 10.1109/JIOT.2018.2884485 ZHANG Puning and MA Jie. Channel characteristic aware privacy protection mechanism in WBAN[J]. Sensors, 2018, 18(8): 2403. doi: 10.3390/s18082403 ZHANG Puning, KANG Xuyuan, WU Dapeng, et al. High-accuracy entity state prediction method based on deep belief network toward IoT search[J]. IEEE Wireless Communications Letters, 2019, 8(2): 492–495. doi: 10.1109/LWC.2018.2877639 ZHANG Puning, KANG Xuyuan, LIU Yuzhe, et al. Cooperative willingness aware collaborative caching mechanism towards cellular D2D communication[J]. IEEE Access, 2018, 6: 67046–67056. doi: 10.1109/ACCESS.2018.2873662 WU Dapeng, LIU Bingxu, YANG Qing, et al. Social-aware cooperative caching mechanism in mobile social networks[J]. Journal of Network and Computer Applications, 2020, 149: 102457. doi: 10.1016/j.jnca.2019.102457 高云全, 李小勇, 方滨兴. 物联网搜索技术综述[J]. 通信学报, 2015, 36(12): 57–76. doi: 10.11959/j.issn.1000-436x.2015315GAO Yunquan, LI Xiaoyong, and FANG Binxing. Survey on the search of internet of things[J]. Journal on Communications, 2015, 36(12): 57–76. doi: 10.11959/j.issn.1000-436x.2015315 张普宁, 刘元安, 吴帆, 等. 物联网中适用于内容搜索的实体状态匹配预测方法[J]. 电子与信息学报, 2015, 37(12): 2815–2820. doi: 10.11999/JEIT150191ZHANG Puning, LIU Yuan’an, WU Fan, et al. An entity state matching prediction method for content-based search in the internet of things[J]. Journal of Electronics &Information Technology, 2015, 37(12): 2815–2820. doi: 10.11999/JEIT150191 邹宇驰, 刘松, 于楠, 等. 基于搜索的物联网设备识别框架[J]. 信息安全学报, 2018, 3(4): 25–40. doi: 10.19363/J.cnki.cn10-1380/tn.2018.07.03ZOU Yuchi, LIU Song, YU Nan, et al. IoT device recognition framework based on Web search[J]. Journal of Cyber Security, 2018, 3(4): 25–40. doi: 10.19363/J.cnki.cn10-1380/tn.2018.07.03 李强, 贾煜璇, 宋金珂, 等. 网络空间物联网信息搜索[J]. 信息安全学报, 2018, 3(5): 38–53.LI Qiang, JIA Yuxuan, SONG Jinke, et al. Search of internet of thing information in the cyberspace[J]. Journal of Cyber Security, 2018, 3(5): 38–53. MA Huadong and LIU Wu. A progressive search paradigm for the internet of things[J]. IEEE MultiMedia, 2018, 25(1): 76–86. doi: 10.1109/MMUL.2017.265091429 YAP K K, SRINIVASAN V, and MOTANI M. Max: Wide area human-centric search of the physical world[J]. ACM Transactions on Sensor Networks, 2008, 4(4): 26. doi: 10.1145/1387663.1387672 WANG Haodong, TAN C C, and LI Qun. Snoogle: A search engine for pervasive environments[J]. IEEE Transactions on Parallel and Distributed Systems, 2010, 21(8): 1188–1202. doi: 10.1109/TPDS.2009.145 TAN C C, SHENG Bo, WANG Haodong, et al. Microsearch: A search engine for embedded devices used in pervasive computing[J]. ACM Transactions on Embedded Computing Systems, 2010, 9(4): 43. doi: 10.1145/1721695.1721709 FATHY Y, BARNAGHI P, and TAFAZOLLI R. Large-scale indexing, discovery, and ranking for the Internet of Things (IoT)[J]. ACM Computing Surveys, 2018, 51(2): 29. doi: 10.1145/3154525 刘强强, 余黎青, 赵鹏, 等. 基于移动平台的图像检索系统[J]. 计算机技术与发展, 2016, 26(11): 10–13.LIU Qiangqiang, YU Liqing, ZHAO Peng, et al. A novel image retrieval system based on mobile platform[J]. Computer Technology and Development, 2016, 26(11): 10–13. TRUONG C, RÖMER K, and CHEN Kai. Fuzzy-based sensor search in the web of things[C]. The 3rd IEEE International Conference on the Internet of Things, Wuxi, China, 2012: 127–134. doi: 10.1109/IOT.2012.6402314. 刘素艳, 刘元安, 吴帆, 等. 物联网中基于相似性计算的传感器搜索[J]. 电子与信息学报, 2018, 40(12): 3020–3027.LIU Suyan, LIU Yuanan, WU Fan, et al. Sensor search based on sensor similarity computing in the internet of things[J]. Journal of Electronics &Information Technology, 2018, 40(12): 3020–3027. LI Zhidu, JIANG Yuming, GAO Yuehong, et al. On buffer-constrained throughput of a wireless-powered communication system[J]. IEEE Journal on Selected Areas in Communications, 2019, 37(2): 283–297. doi: 10.1109/JSAC.2018.2872374 PATTAR S, BUYYA R, VENUGOPAL K R, et al. Searching for the IoT resources: Fundamentals, requirements, comprehensive review, and future directions[J]. IEEE Communications Surveys & Tutorials, 2018, 20(3): 2101–2132. doi: 10.1109/COMST.2018.2825231 ZHANG Zufan, ZENG Tian, YU Xiulan, et al. Social-aware D2D pairing for cooperative video transmission using matching theory[J]. Mobile Networks and Applications, 2018, 23(3): 639–649. doi: 10.1007/s11036-017-0973-z Intel Berkeley Research Lab. Intel berkeley research lab sensors data[EB/OL]. http://db.csail.mit.edu/labdata/labdata.html, 2004. -

 下载:
下载:


计量
- 文章访问数: 2542
- HTML全文浏览量: 712
- PDF下载量: 64
- 被引次数: 0
 下载:
下载:
