

Global Navigation Satellite System Spoofing Mitigation Method by Utilizing Signal Reconstruction
-
摘要:
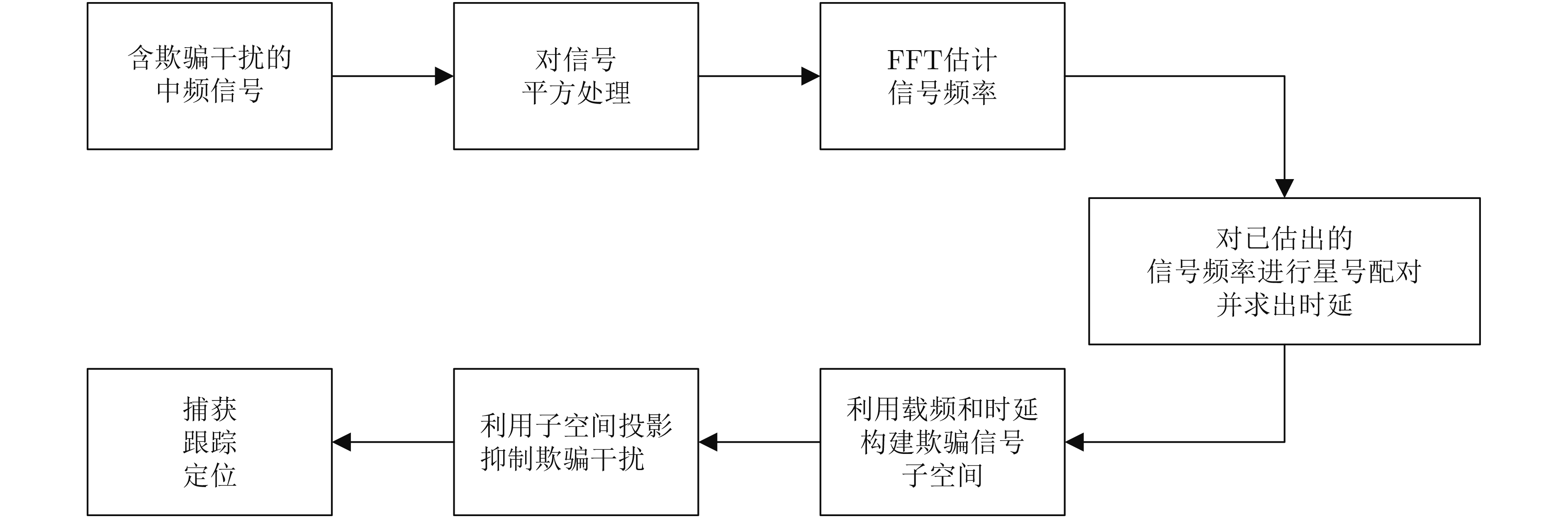
欺骗式干扰通过发射与真实卫星信号相似的信号误导接收机产生错误的定位结果,具有极大的危害。该文针对转发式欺骗干扰,提出一种基于信号重构的单天线欺骗干扰抑制方法。该方法首先通过参数估计方法估计出欺骗信号载波频率和码相位,然后构建欺骗信号子空间正交投影矩阵以抑制干扰。仿真实验结果表明该方法对欺骗干扰具有良好的抑制效果,能够保障接收机在干扰环境中实现有效定位,并具有较低的运算复杂度。
Abstract:Spoofing misleads the receiver to generate the wrong position information by trans-mitting signals similar to authentic satellite signals, which has great harm. In this paper, a single-antenna spoofing mitigation algorithm based on signal reconstruction is proposed for meaconing. Firstly, the carrier frequency and code phase of spoofing signal are obtained by parameter estimation method, and then the orthogonal projection matrix of spoofing signal subspace is constructed to suppress spoofing. The simulation results show that the algorithm has a good suppression effect on spoofing and ensure the receiver can locate effectively in the interference environment, and the algorithm also has lower computational complexity.
-
Key words:
- Satellite navigation /
- Spoofing /
- Signal reconstruction /
- Interference suppression
-
表 3 算法计算时间随卫星个数变化表(s)
卫星数量 4 5 6 7 8 9 10 11 12 文献算法 2.507 2.544 2.567 2.597 2.641 2.642 2.689 2.698 2.733 本文算法 0.235 0.268 0.293 0.313 0.336 0.355 0.380 0.402 0.421  下载: 导出CSV
下载: 导出CSV
-
吴仁彪, 王文益, 卢丹, 等. 卫星导航自适应抗干扰技术[M]. 北京: 科学出版社, 2015: 1–22.WU Renbiao, WANG Wenyi, LU Dan, et al. Adaptive Interference Mitigation in GNSS[M]. Beijing: Science Press, 2015: 1–22. JAFARNIA JAHROMI A. GNSS signal authenticity verification in the presence of structural interference[D]. [Ph.D. dissertation], University of Calgary, 2013: 18-51. WESSON K D, GROSS J N, HUMPHREYS T E, et al. GNSS signal authentication via power and distortion monitoring[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(2): 739–754. doi: 10.1109/TAES.2017.2765258 PSIAKI M L, O’HANLON B W, POWELL S P, et al. GNSS spoofing detection using two-antenna differential carrier phase[C]. The 27th International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, USA, 2014: 2776–2800. BROUMANDAN A, JAFARNIA-JAHROMI A, DANESHMAND S, et al. Overview of spatial processing approaches for GNSS structural interference detection and mitigation[J]. Proceedings of the IEEE, 2016, 104(6): 1246–1257. doi: 10.1109/JPROC.2016.2529600 HU Yanfeng, BIAN Shaofeng, CAO Kejin, et al. GNSS spoofing detection based on new signal quality assessment model[J]. GPS Solutions, 2018, 22(1): No. 28. doi: 10.1007/s10291-017-0693-7 SUN Chao, CHEONG J W, DEMPSTER A G, et al. Moving variance-based signal quality monitoring method for spoofing detection[J]. GPS Solutions, 2018, 22(3): No. 83. doi: 10.1007/s10291-018-0745-7 WESSON K D, SHEPARD D P, BHATTI J A, et al. An evaluation of the vestigial signal defense for civil GPS anti-spoofing[C]. The 24th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, USA, 2011: 2646–2656. HUMPHREYS T E, LEDVINA B M, PSIAKI M L, et al. Assessing the spoofing threat: Development of a portable GPS civilian spoofer[C]. The 21st International Technical Meeting of the Satellite Division of The Institute of Navigation, Savanna, Georgia, 2008: 2314-2325. PSIAKI M L and HUMPHREYS T E. GNSS spoofing and detection[J]. Proceedings of the IEEE, 2016, 104(6): 1258–1270. doi: 10.1109/JPROC.2016.2526658 MAGIERA J and KATULSKI R. Applicability of null-steering for spoofing mitigation in civilian GPS[C]. 2014 The 79th IEEE Vehicular Technology Conference, Seoul, South Korea, 2014: 1-5. doi: 10.1109/VTCSpring.2014.7022835. DANESHMAND S, JAFARNIA-JAHROMI A, BROUMANDAN A, et al. A low-complexity GPS anti-spoofing method using a multi-antenna array[C]. The 25th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, USA, 2012: 1233–1243. PSIAKI M L, HUMPHREYS T E, and STAUFFER B. Attackers can spoof navigation signals without our knowledge. Here’s how to fight back GPS lies[J]. IEEE Spectrum, 2016, 53(8): 26–53. doi: 10.1109/MSPEC.2016.7524168 HAN Shuai, CHEN Lei, MENG Weixiao, et al. Improve the security of GNSS receivers through spoofing mitigation[J]. IEEE Access, 2017, 5: 21057–21069. doi: 10.1109/access.2017.2754414 SCHARF L L and FRIEDLANDER B. Matched subspace detectors[J]. IEEE Transactions on Signal Processing, 1994, 42(8): 2146–2157. doi: 10.1109/78.301849 崔建华, 程乃平, 倪淑燕. 阵列天线抑制欺骗式导航干扰信号方法研究[J]. 电子学报, 2018, 46(2): 365–371. doi: 10.3969/j.issn.0372-2112.2018.02.015CUI Jianhua, CHENG Naiping, and NI Shuyan. Research on spoofing suppressing method using antenna array for navigation signal[J]. Acta Electronica Sinica, 2018, 46(2): 365–371. doi: 10.3969/j.issn.0372-2112.2018.02.015 LI Jian and WU Renbiao. An efficient algorithm for time delay estimation[J]. IEEE Transactions on Signal Processing, 1998, 46(8): 2231–2235. doi: 10.1109/78.705444 LI Jie, WU Renbiao, WANG Wenyi, et al. A novel GPS signal acquisition algorithm[J]. Advances in Information Sciences & Service Sciences, 2012, 4(17): 597–604. -

 下载:
下载:





计量
- 文章访问数: 3480
- HTML全文浏览量: 2176
- PDF下载量: 134
- 被引次数: 0
