

Joint 2D-DOA and Polarization Parameter Estimation with Sparsely Stretched L-shaped Polarization Sensitive Array
-
摘要:
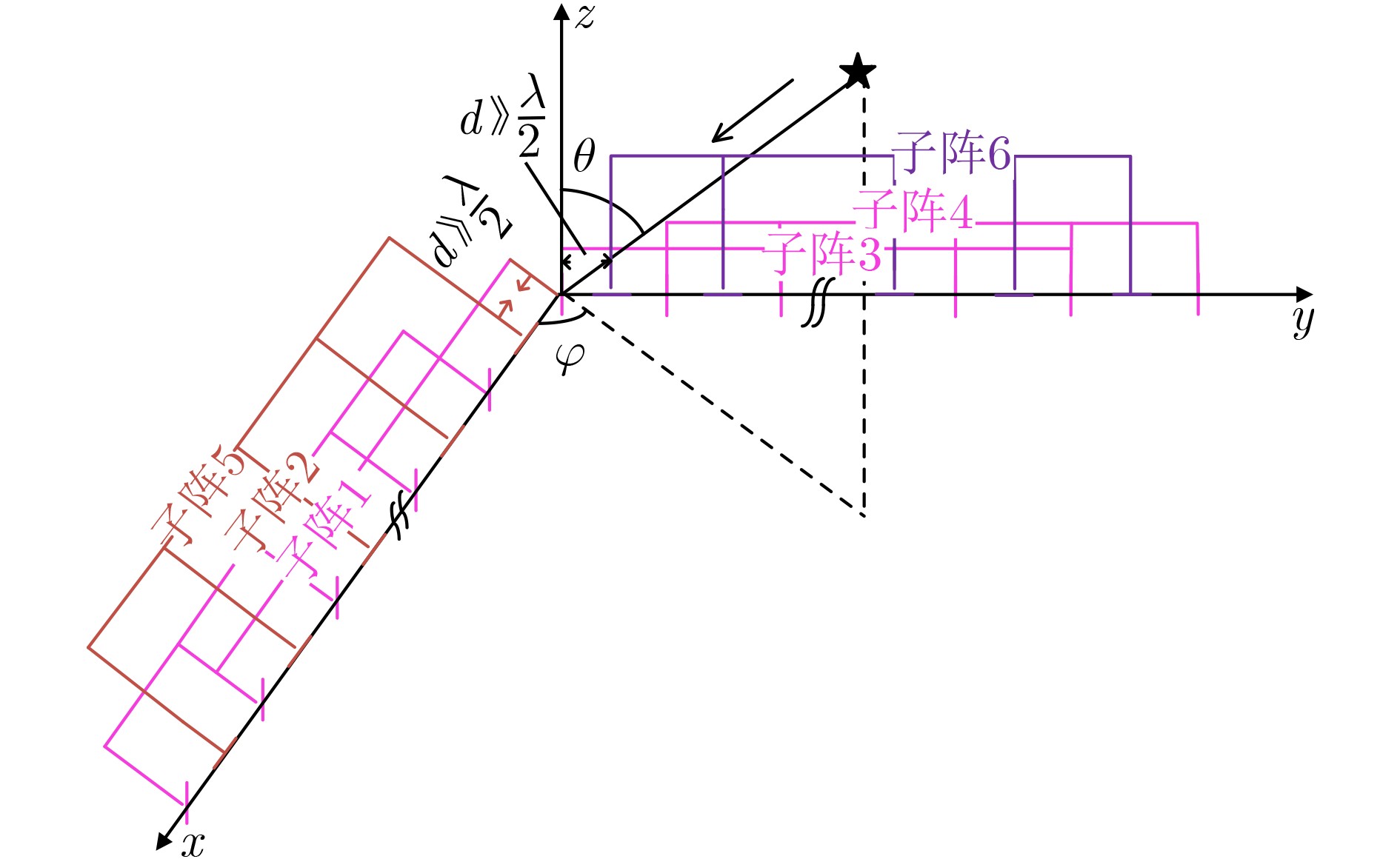
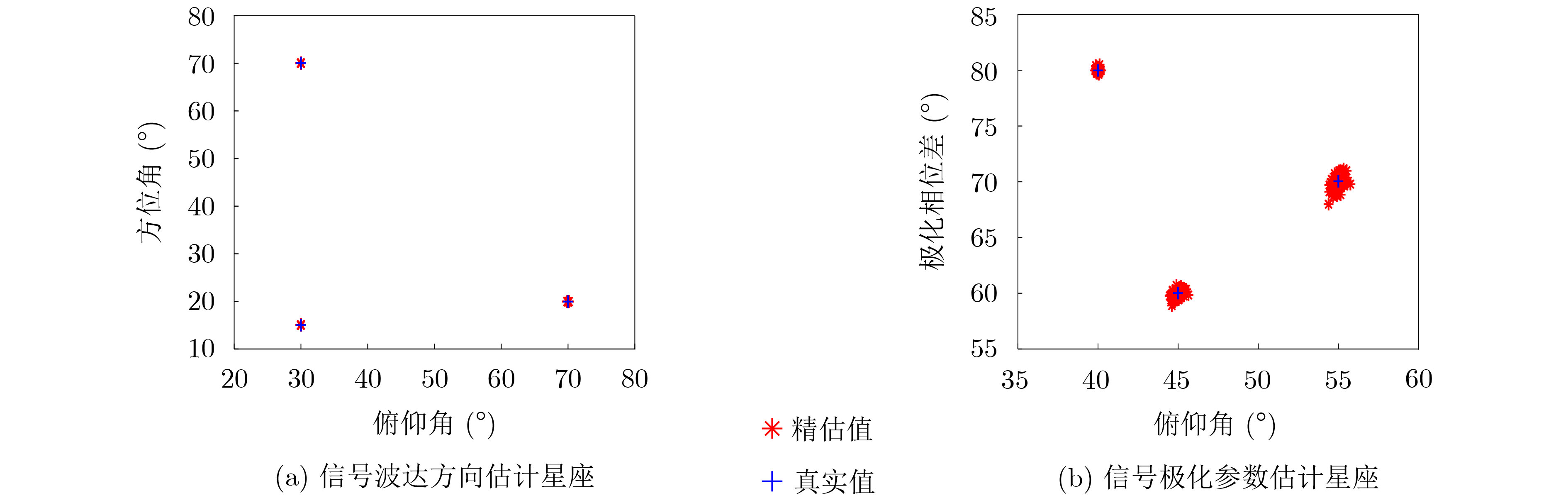
为降低现有的共心式矢量传感器阵列天线间存在的严重互耦影响,进一步提高参数估计精度,该文提出一种稀疏拉伸式L型极化敏感阵列(SSL-PSA),并针对该阵列提出一种2维波达方向(DOA)和极化参数联合估计算法。首先建立稀疏拉伸式极化敏感阵列的信号模型,然后将阵列划分为6个子阵,采用子空间旋转不变算法(ESPRIT)算法得到多个旋转不变因子(RIFs),再根据旋转不变因子间的关系,通过数学运算,得到一组方向余弦有模糊精估计值和4组无模糊粗估计值;然后重构出对应的4组导向矢量,根据导向矢量和噪声子空间的正交性,确定出正确的一组无模糊粗估计值;最后通过现有的解模糊方法得到高精度且无模糊的DOA和极化参数估计值。该文所提阵列不存在共心结构,相对于现有的含有共心式矢量传感器结构的阵列,大大降低了互耦影响,且可在不增加天线数目的前提下,有效扩展阵列的2维孔径,大大提高DOA估计精度。仿真结果证明该文所提方法的有效性。
-
关键词:
- 稀疏拉伸式L型极化敏感阵列 /
- 波达方向 /
- 极化 /
- 阵列互耦
Abstract:In order to reduce the serious mutual coupling effect across the elements of the existing collocated vector sensor array and further improve the parameter estimation accuracy, a Sparsely Stretched L-shaped Polarization Sensitive Array (SSL-PSA) is proposed, and a novel method for estimating the azimuth-elevation angles as well as polarization parameters is presented accordingly. Firstly, the signal model of SSL-PSA is established. Then, the SSL-PSA is divided into 6 subarrays, thus the ESPRIT algorithm can be utilized to estimate the Rotational Invariant Factors (RIFs). On this basis, a set of fine but ambiguous estimates and four sets of unambiguous coarse estimates of direction cosine are obtained by a series of mathematical operations. Then, four corresponding steering vectors can be reconstructed and the correct coarse direction-cosine estimation can be determined according to the orthogonality of the steering vector and the noise subspace. Finally, the estimates of Direction-Of-Arrival (DOA) and polarization parameter can be achieved by the existing disambiguate method. Compared to the existing polarization sensitive array consists of collocated vector sensor, the proposed one has no collocated configuration, which can reduce the mutual coupling effect. Additionally, the proposed method can also extend the spatial aperture and refine the direction-finding accuracy without adding any redundant antennas. Simulations are carried out to verify the effectiveness of the proposed method.
-
徐友根, 刘志文, 龚晓峰. 极化敏感阵列信号处理[M]. 北京: 北京理工大学出版社, 2013: 1–21.XU Yougen, LIU Zhiwen, and GONG Xiaofeng. Signal Processing Based on Polarization Sensitive Array[M]. Beijing: Beijing Institute of Technology Press, 2013: 1–21. GU Chen, HE Jin, LI Hongtao, et al. Target localization using MIMO electromagnetic vector array systems[J]. Signal Processing, 2013, 93(7): 2103–2107. doi: 10.1016/j.sigpro.2013.02.005 邵华, 苏卫民, 顾红, 等. 基于稀疏互质电磁矢量阵列的MUSIC算法[J]. 电子与信息学报, 2012, 34(9): 2033–2038. doi: 10.3724/SP.J.1146.2012.00021SHAO Hua, SU Weimin, GU Hong, et al. MUSIC algorithm based on sparse coprime electromagnetic vector arrays[J]. Journal of Electronics &Information Technology, 2012, 34(9): 2033–2038. doi: 10.3724/SP.J.1146.2012.00021 LUO Feng and XIN Yuan. Enhanced “vector-cross-product” direction-finding using a constrained sparse triangular-array[J]. EURASIP Journal on Advances in Signal Processing, 2012, 2012(1): 115–126. doi: 10.1186/1687-6180-2012-115 YUAN Xin, WONG K T, and AGRAWAL K. Polarization estimation with a dipole-dipole pair, a dipole-loop pair, or a loop-loop pair of various orientations[J]. IEEE Transactions on Antennas and Propagation, 2012, 60(5): 2442–2452. doi: 10.1109/TAP.2012.2189740 YUAN Xin, WONG K T, XU Zixin, et al. Various compositions to form a triad of collocated dipoles/loops, for direction finding and polarization estimation[J]. IEEE Sensors Journal, 2012, 12(6): 1763–1771. doi: 10.1109/JSEN.2011.2179532 GONG X F, LIU Z W, and XU Y G. Regularised parallel factor analysis for the estimation of direction-of-arrival and polarisation with a single electromagnetic vector-sensor[J]. IET Signal Processing, 2011, 5(4): 390–396. doi: 10.1049/iet-spr.2009.0221 CHINTAGUNTA S and PONNUSAMY P. 2D-DOD and 2D-DOA estimation using the electromagnetic vector sensors[J]. Signal Processing, 2018, 147: 163–172. doi: 10.1016/j.sigpro.2018.01.025 CHINTAGUNTA S and PONNUSAMY P. Integrated polarisation and diversity smoothing algorithm for DOD and DOA estimation of coherent targets[J]. IET Signal Processing, 2018, 12(4): 447–453. doi: 10.1049/iet-spr.2017.0276 WONG K T and YUAN Xin. “Vector cross-product direction-finding” with an electromagnetic vector-sensor of six orthogonally oriented but spatially noncollocating dipoles/loops[J]. IEEE Transactions on Signal Processing, 2011, 59(1): 160–171. doi: 10.1109/TSP.2010.2084085 郑桂妹, 陈伯孝, 杨明磊. 新型拉伸电磁矢量传感器的两维高精度波达方向估计[J]. 系统工程与电子技术, 2014, 36(7): 1282–1290. doi: 10.3969/j.issn.1001-506X.2014.07.10ZHENG Guimei, CHEN Baixiao, and YANG Minglei. High accuracy 2D DOA estimation with a novel spatially spread electromagnetic vector-sensor[J]. Systems Engineering and Electronics, 2014, 36(7): 1282–1290. doi: 10.3969/j.issn.1001-506X.2014.07.10 YUAN Xin. Spatially spread dipole/loop quads/quints: For direction finding and polarization estimation[J]. IEEE Antennas and Wireless Propagation Letters, 2013, 12: 1081–1084. doi: 10.1109/LAWP.2013.2280584 GONG Xiaofeng, JIANG Jiacheng, LI Hui, et al. Spatially spread dipole/loop quint for vector-cross-product-based direction finding and polarisation estimation[J]. IET Signal Processing, 2018, 12(5): 636–642. doi: 10.1049/iet-spr.2017.0232 ZHENG Guimei. Two-Dimensional DOA estimation for polarization sensitive array consisted of spatially spread crossed-dipole[J]. IEEE Sensors Journal, 2018, 18(12): 5014–5023. doi: 10.1109/jsen.2018.2820168 司伟建, 周炯赛, 曲志昱. 稀疏极化敏感阵列的波达方向和极化参数联合估计[J]. 电子与信息学报, 2016, 38(5): 1129–1134. doi: 10.11999/JEIT150840SI Weijian, ZHOU Jiongsai, and QU Zhiyu. Joint DOA and polarization estimation with sparsely distributed polarization sensitive array[J]. Journal of Electronics &Information Technology, 2016, 38(5): 1129–1134. doi: 10.11999/JEIT150840 -

 下载:
下载:




计量
- 文章访问数: 2899
- HTML全文浏览量: 1047
- PDF下载量: 95
- 被引次数: 0
