

Target Tracking with Underwater Sensor Networks Based on Grubbs Criterion and Improved Particle Filter Algorithm
-
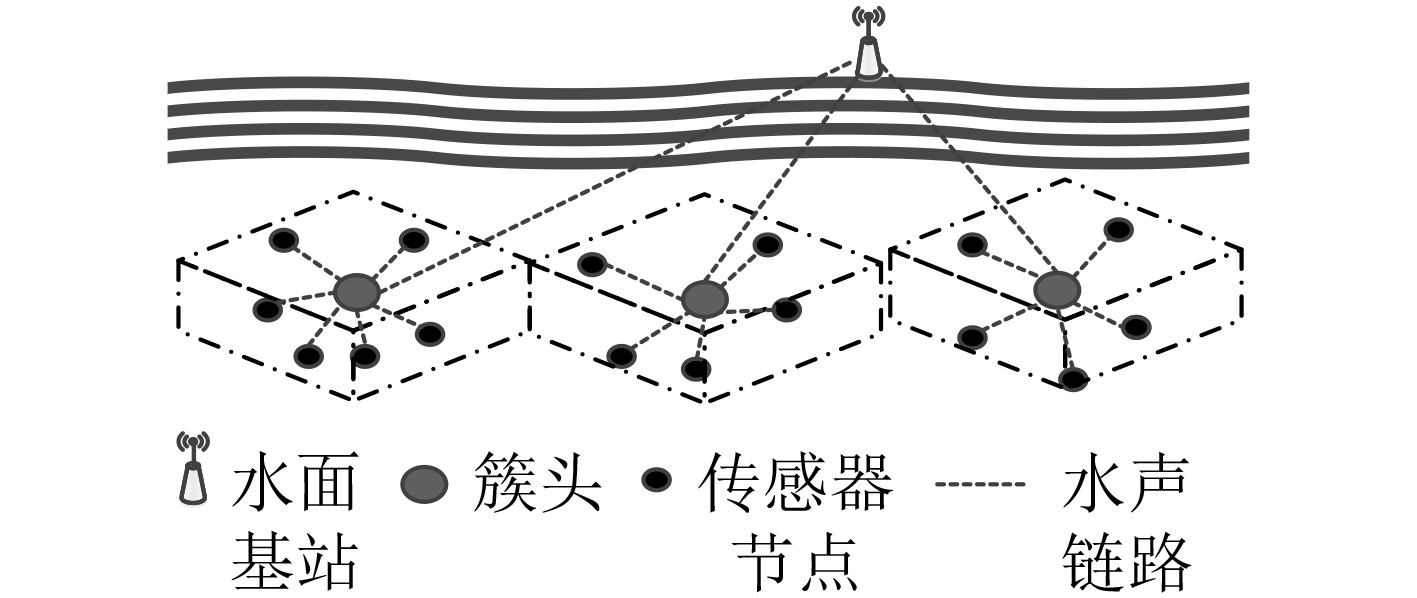
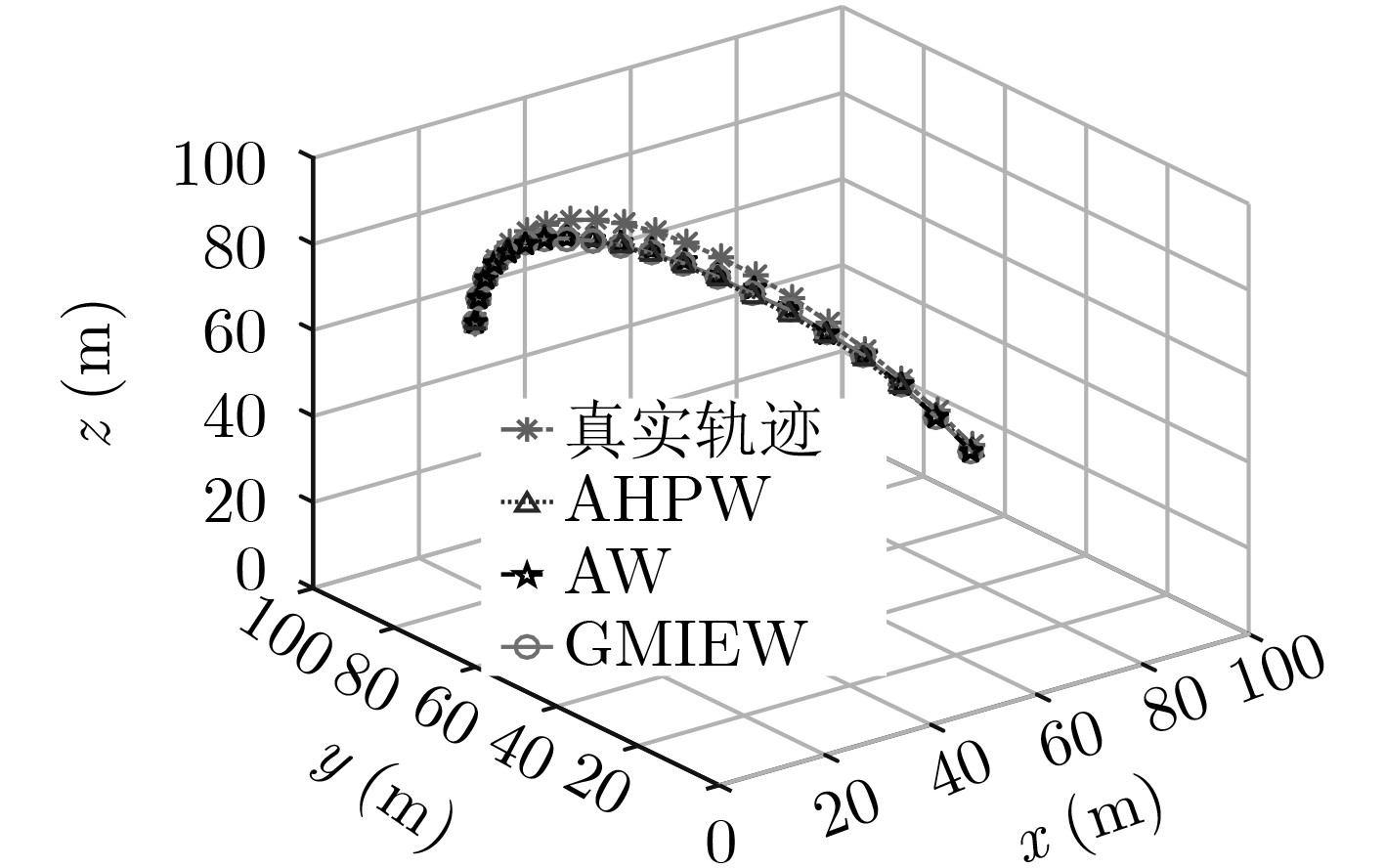
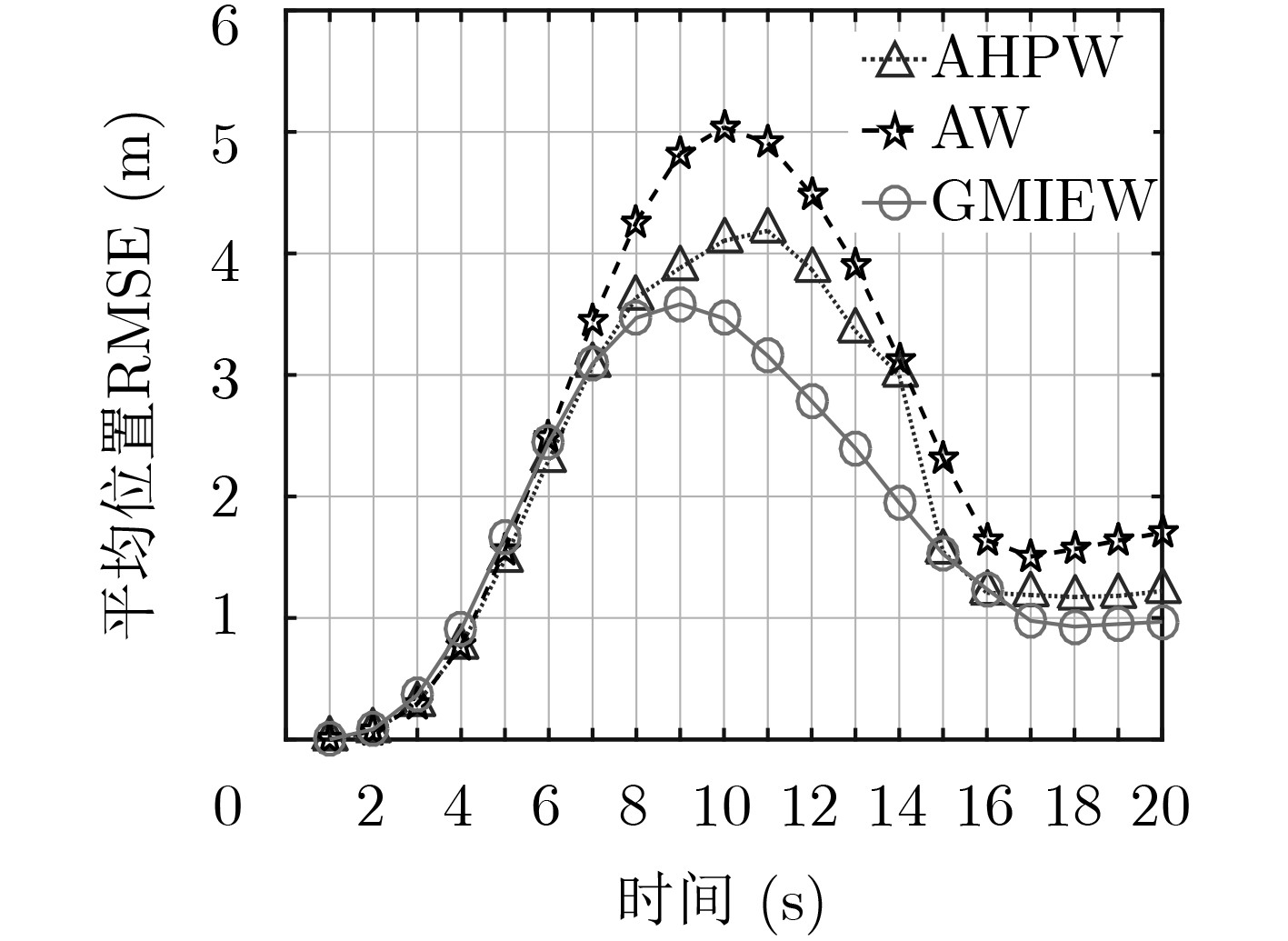
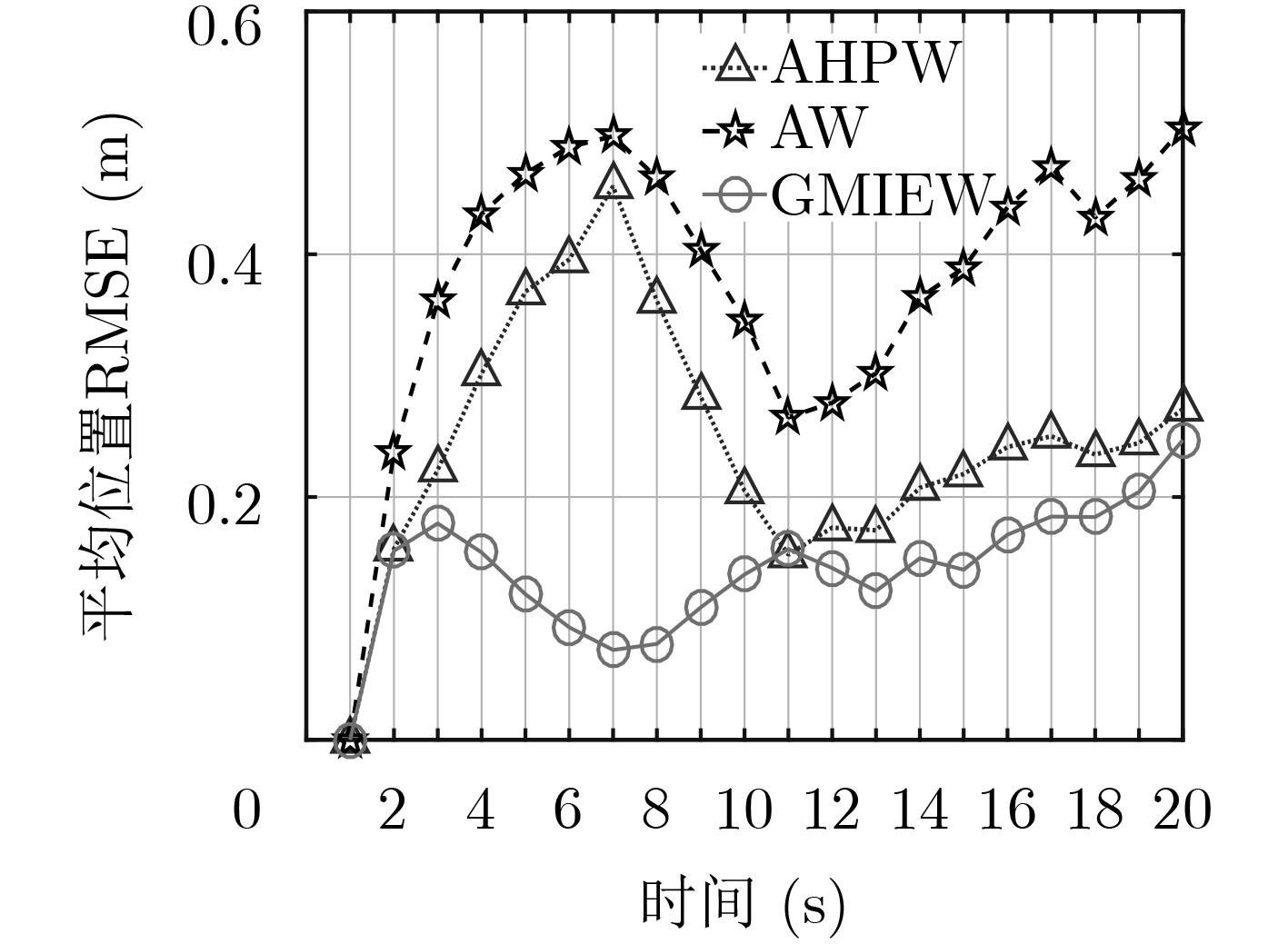
摘要: 水下无线传感网络(UWSN)执行目标跟踪时,因为各个传感器节点测量值对目标状态估计的贡献不一样以及节点能量有限,所以探索一种好的节点融合权重方法和节点规划机制能够获得更好的跟踪性能。针对上述问题,该文提出一种基于Grubbs准则和互信息熵加权融合的分布式粒子滤波(PF)目标跟踪算法(GMIEW)。首先利用Grubbs准则对传感器节点所获得的信息进行分析检验,去除干扰信息和错误信息。其次,在粒子滤波的重要性权值计算的过程中,引入动态加权因子,采用传感器节点的测量值与目标状态之间的互信息熵,来反映传感器节点提供的目标信息量,从而获得各个节点相应的加权因子。最后,采用3维场景下的簇-树型网络拓扑结构,跟踪监测区域内的目标。实验结果显示,该算法可有效提高水下传感器网络测量数据对目标跟踪预测的准确度,降低跟踪误差。Abstract: When the Underwater Wireless Sensor Network (UWSN) performs target tracking, the contributions of the measured values of the nodes are different, and the battery energy carried by the sensor node is limited. Therefore, a good node fusion weight method and node planning mechanism can obtain better tracking performance. A distributed particle filter target tracking algorithm based on Grubbs criterion and Mutual Information Entropy Weighted (GMIEW) fusion is proposed to solve the above problem in this paper. Firstly, the Grubbs criterion is used to analyze and verify the information obtained by the sensor nodes before the information fusion, and the interference information and error information are removed. Secondly, in the process of calculating the importance weight of particle filter, the dynamic weighting factor is introduced. The mutual information entropy between the measured value of the sensor node and the target state is used to reflect the amount of target information provided by the sensor node, so as to obtain the corresponding weighting factor of each node. Finally, the improved cluster-tree network topology is used to track the target in three-dimensional space. Simulation results show that the proposed algorithm improves greatly the accuracy of underwater sensor measurement data for target tracking prediction and reduces the tracking error.
-
表 1 目标跟踪算法仿真中的参数设置
仿真参数 数值 目标初始位置(m) (0, 60, 80) 目标初始加速度(m/s2) (5, 6, –1) 粒子数(个) 2000 声音传感器密度ρ(个/m3) 0.00008 仿真次数(次) 50 目标初始速度(m/s) (15, –20, 4) 采样间隔(s) 1 监测时长(s) 20 过程噪声方差 0.1 目标信号能量S 5000  下载: 导出CSV
下载: 导出CSV
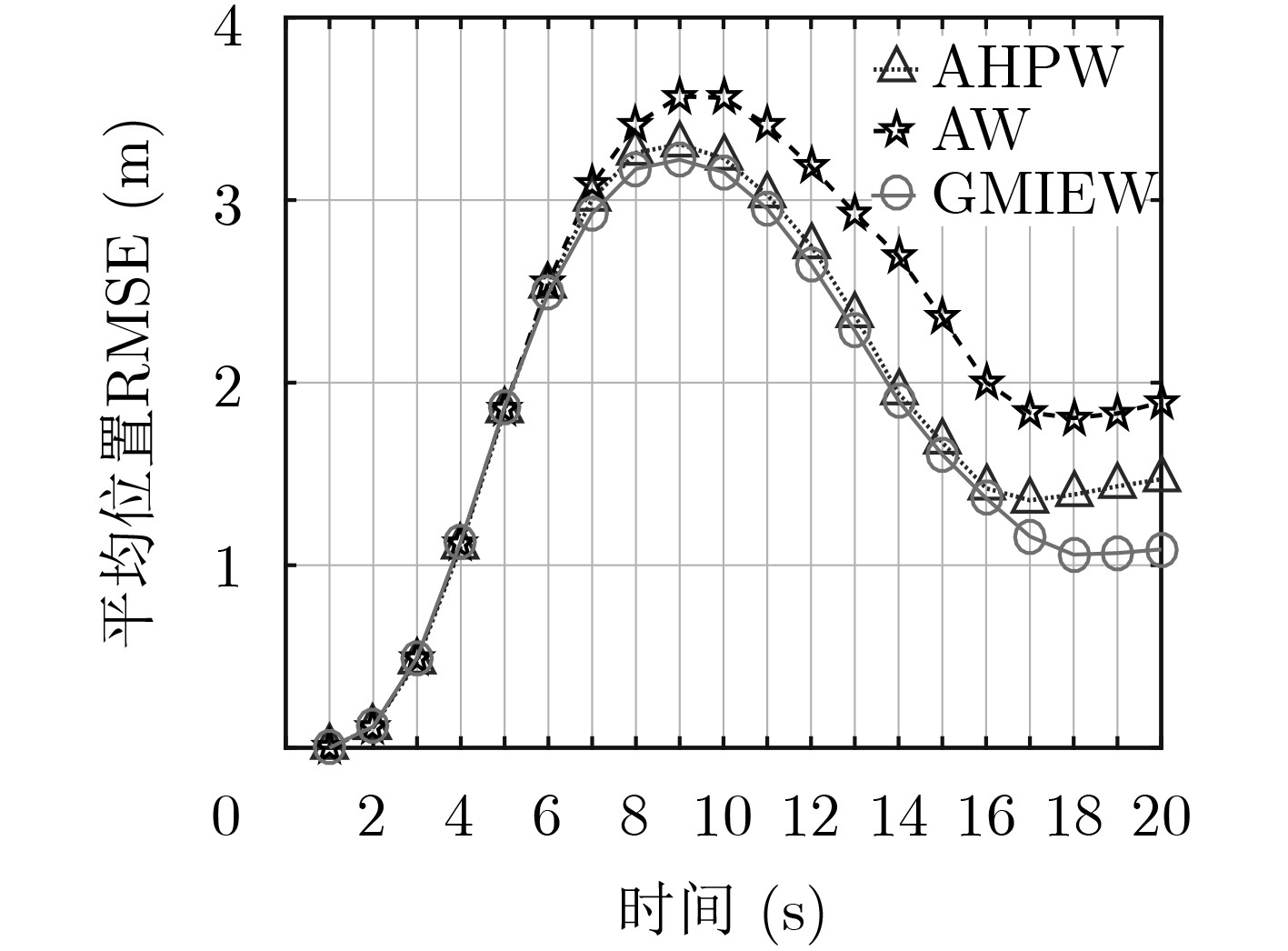
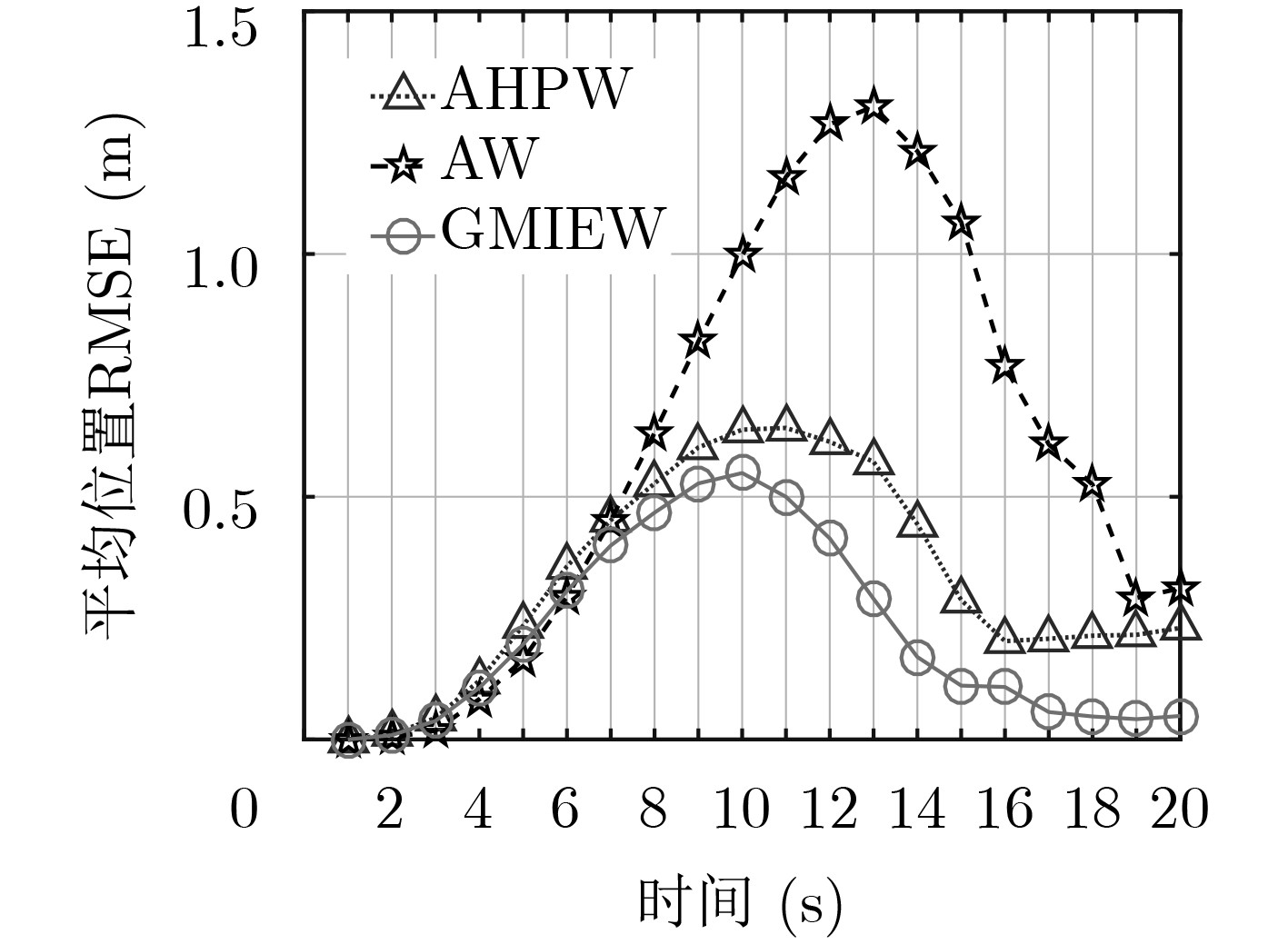
表 3 3D仿真场景中不同传感器密度ρ下3种算法的平均位置RMSE(个/m3)
算法 0.00006 0.00008 0.00010 AW 3.6452 1.0442 0.9236 AHPW 2.6235 0.8940 0.5024 GMIEW 1.5261 0.5023 0.3026
下载: 导出CSV
-
HEIDEMANN J, STOJANOVIC M, and ZORZI M. Underwater sensor networks: Applications, advances and challenges[J]. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 2012, 370(1958): 158–175. doi: 10.1098/rsta.2011.0214 SOUZA É L, NAKAMURA E F, and PAZZI R W. Target tracking for sensor networks: A survey[J]. ACM Computing Surveys (CSUR) , 2016, 49(2): 31. doi: 10.1145/2938639 HAN Guangjie, JIANG Jinfang, ZHANG Chenyu, et al. A survey on mobile anchor node assisted localization in wireless sensor networks[J]. IEEE Communications Surveys & Tutorials, 2016, 18(3): 2220–2243. doi: 10.1109/COMST.2016.2544751 周伟, 石为人, 张洪德, 等. 无线传感器网络的分布式目标跟踪研究[J]. 仪器仪表学报, 2013, 34(7): 1485–1491. doi: 10.19650/j.cnki.cjsi.2013.07.007ZHOU Wei, SHI Weiren, ZHANG Hongde, et al. Study on distributed target tracking in wireless sensor networks[J]. Chinese Journal of Scientific Instrument, 2013, 34(7): 1485–1491. doi: 10.19650/j.cnki.cjsi.2013.07.007 AKYILDIZ I F, POMPILI D, and MELODIA T. Underwater acoustic sensor networks: Research challenges[J]. Ad Hoc Networks, 2005, 3(3): 257–279. doi: 10.1016/j.adhoc.2005.01.004 WANG Xin, XU Mengxi, WANG Huibin, et al. Combination of interacting multiple models with the particle filter for three-dimensional target tracking in underwater wireless sensor networks[J]. Mathematical Problems in Engineering, 2012, 2012: 829451. doi: 10.1155/2012/829451 DEHNAVI S M, AYATI M, and ZAKERZADEH M R. Three dimensional target tracking via underwater acoustic wireless sensor network[C]. 2017 Artificial Intelligence and Robotics, Qazvin, Iran, 2017: 153–157. doi: 10.1109/RIOS.2017.7956459. ZHANG Qiang, ZHANG Chaojie, LIU Meiqin, et al. Local node selection for target tracking based on underwater wireless sensor networks[J]. International Journal of Systems Science, 2015, 46(16): 2918–2927. doi: 10.1080/00207721.2014.880199 POOSTPASAND M and JAVIDAN R. An adaptive target tracking method for 3D underwater wireless sensor networks[J]. Wireless Networks, 2018, 24(8): 2797–2810. doi: 10.1007/s11276-017-1506-1 ISBITIREN G and AKAN O B. Three-dimensional underwater target tracking with acoustic sensor networks[J]. IEEE Transactions on Vehicular Technology, 2011, 60(8): 3897–3906. doi: 10.1109/TVT.2011.2163538 TISDALE J, RYAN A, KIM Z, et al. A multiple UAV system for vision-based search and localization[C]. 2008 American Control Conference, Seattle, USA, 2008: 1985–1990. doi: 10.1109/ACC.2008.4586784. RYAN A and HEDRICK J K. Particle filter based information-theoretic active sensing[J]. Robotics and Autonomous Systems, 2010, 58(5): 574–584. doi: 10.1016/j.robot.2010.01.001 HOFFMANN G M and TOMLIN C J. Mobile sensor network control using mutual information methods and particle filters[J]. IEEE Transactions on Automatic Control, 2010, 55(1): 32–47. doi: 10.1109/TAC.2009.2034206 AHMADI H, VIANI F, and BOUALLEGUE R. An accurate prediction method for moving target localization and tracking in wireless sensor networks[J]. Ad Hoc Networks, 2018, 70: 14–22. doi: 10.1016/j.adhoc.2017.11.008 ORACEVIC A, AKBAS S, and OZDEMIR S. Secure and reliable object tracking in wireless sensor networks[J]. Computers & Security, 2017, 70: 307–318. doi: 10.1016/j.cose.2017.06.009 LIU Meiqin, ZHANG Duo, ZHANG Senlin, et al. Node depth adjustment based target tracking in UWSNs using improved harmony search[J]. Sensors, 2017, 17(12): 2807. doi: 10.3390/s17122807 HUANG Yan, LIANG Wei, YU Haibin, et al. Target tracking based on a distributed particle filter in underwater sensor networks[J]. Wireless Communications & Mobile Computing, 2008, 8(8): 1023–1033. doi: 10.1002/wcm.660 胡玲, 侍洪波. 基于分簇的动态协同算法在无线传感器网络中的应用[J]. 华东理工大学学报: 自然科学版, 2012, 38(3): 356–359, 390.HU Ling and SHI Hongbo. Dynamic collaborative algorithms based on clustering routing protocol applied in wireless sensor network[J]. Journal of East China University of Science and Technology:Natural Science Edition, 2012, 38(3): 356–359, 390. PILLUTLA L S. Network coding based distributed indoor target tracking using wireless sensor networks[J]. Wireless Personal Communications, 2017, 96(3): 3673–3691. doi: 10.1007/s11277-017-4069-7 黄艳, 梁韦, 于海斌. 基于粒子滤波的无线传感器网络目标跟踪算法[J]. 控制与决策, 2008, 23(12): 1389–1394. doi: 10.3321/j.issn:1001-0920.2008.12.014HUANG Yan, LIANG Wei, YU Haibin, et al. Tracking algorithms based on particle filter for wireless sensor networks[J]. Control and Decision, 2008, 23(12): 1389–1394. doi: 10.3321/j.issn:1001-0920.2008.12.014 SOZER E M, STOJANOVIC M, and PROAKIS J G. Underwater acoustic networks[J]. IEEE Journal of Oceanic Engineering, 2000, 25(1): 72–83. doi: 10.1109/48.820738 ZHANG Bingbing, WANG Yiyin, WANG Hongyi, et al. Tracking a duty-cycled autonomous underwater vehicle by underwater wireless sensor networks[J]. IEEE Access, 2017, 5: 18016–18032. doi: 10.1109/ACCESS.2017.2750322 郭忠文, 罗汉江, 洪锋, 等. 水下无线传感器网络的研究进展[J]. 计算机研究与发展, 2010, 47(3): 377–389.GUO Zhongwen, LUO Hanjiang, HONG Feng, et al. Current progress and research issues in underwater sensor networks[J]. Journal of Computer Research and Development, 2010, 47(3): 377–389. 柴毅, 屈剑锋, 郭茂耘, 等. 分布式传感器网络在线自适应数据融合算法研究[J]. 仪器仪表学报, 2007, 28(8): 129–134.CHAI Yi, QU Jianfeng, GUO Maoyun, et al. Distributed online adaptive data fusion algorithm for wireless sensor networks[J]. Chinese Journal of Scientific Instrument, 2007, 28(8): 129–134. -

 下载:
下载:







图(12) / 表(3)
计量
- 文章访问数: 2115
- HTML全文浏览量: 938
- PDF下载量: 108
- 被引次数: 0
