

Signal Detection Based on Sigmoid Function in Non-Gaussian Noise
-
摘要: 针对非高斯背景下的弱信号检测问题,该文提出一种基于Sigmoid函数的信号检测(SFD)方法。首先依据混合高斯模型对非高斯背景建模,在此基础上系统研究了参数k与SFD的检测性能以及检测特性的关系,确定了k的最佳的取值,并指出SFD在检测性能达到最优的同时也具有恒虚警特性。其次通过固定k值得到了一种新的非参量检测方法,较传统的匹配滤波性能有明显提升。最后进行仿真分析验证了SFD的有效性和优越性。Abstract: To solve the problem of weak signals detection in non-Gaussian background, a method based on Sigmoid function is proposed which is named Sigmoid Function Detector (SFD). Firstly, the non-Gaussian background is modeled as a mixed Gaussian model. Based on this, the relationship between parameter k and SFD's performance and characteristics are systematically analyzed. It is pointed out that SFD will be a constant false alarm detector when its detection performance is optimal. Secondly, a new non-parametric detector is proposed via fixing the parameter k, which has significant improvement over matched filter. Finally, simulation analysis is carried out to verify the effectiveness and superiority of SFD.
-
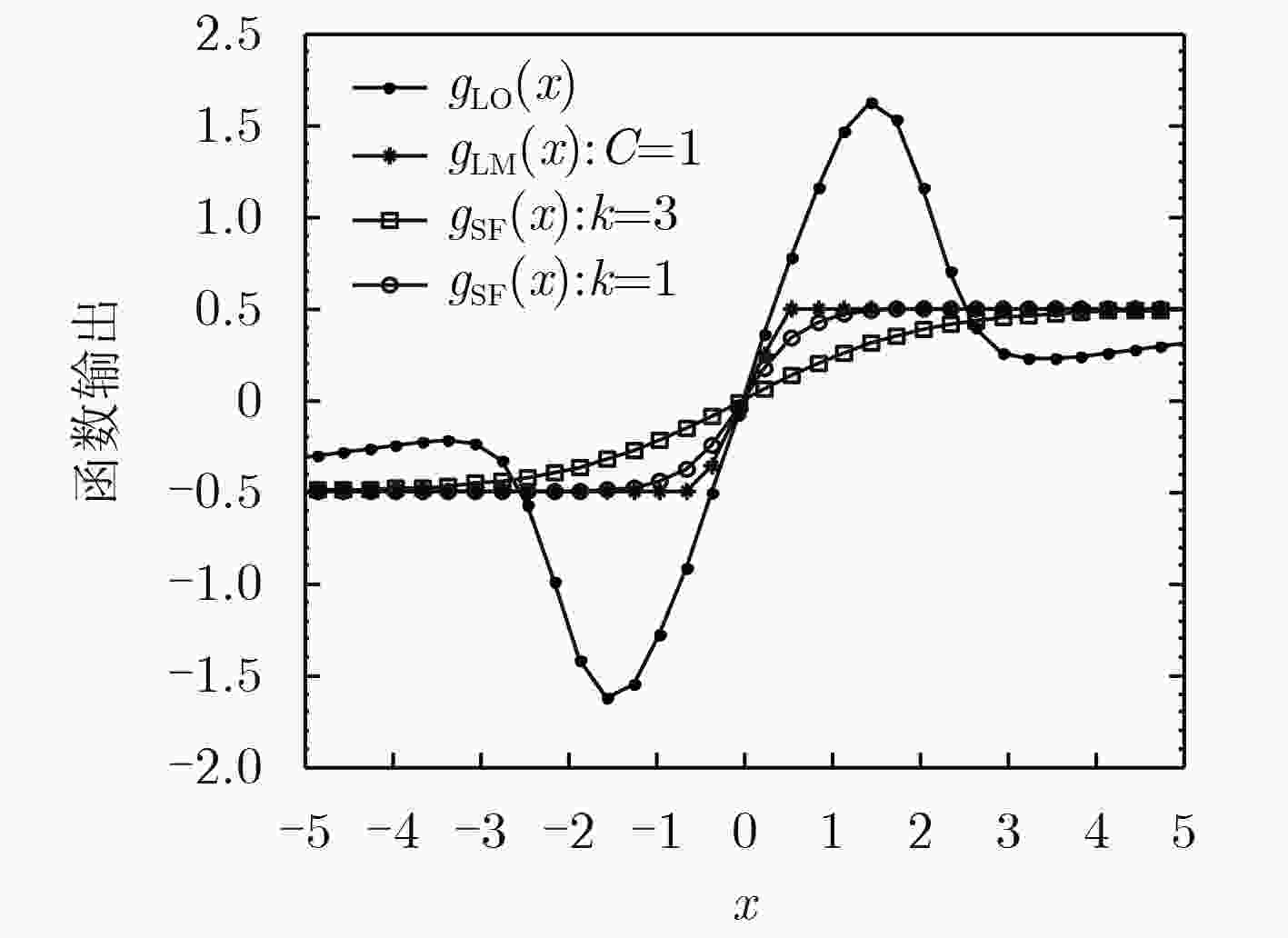
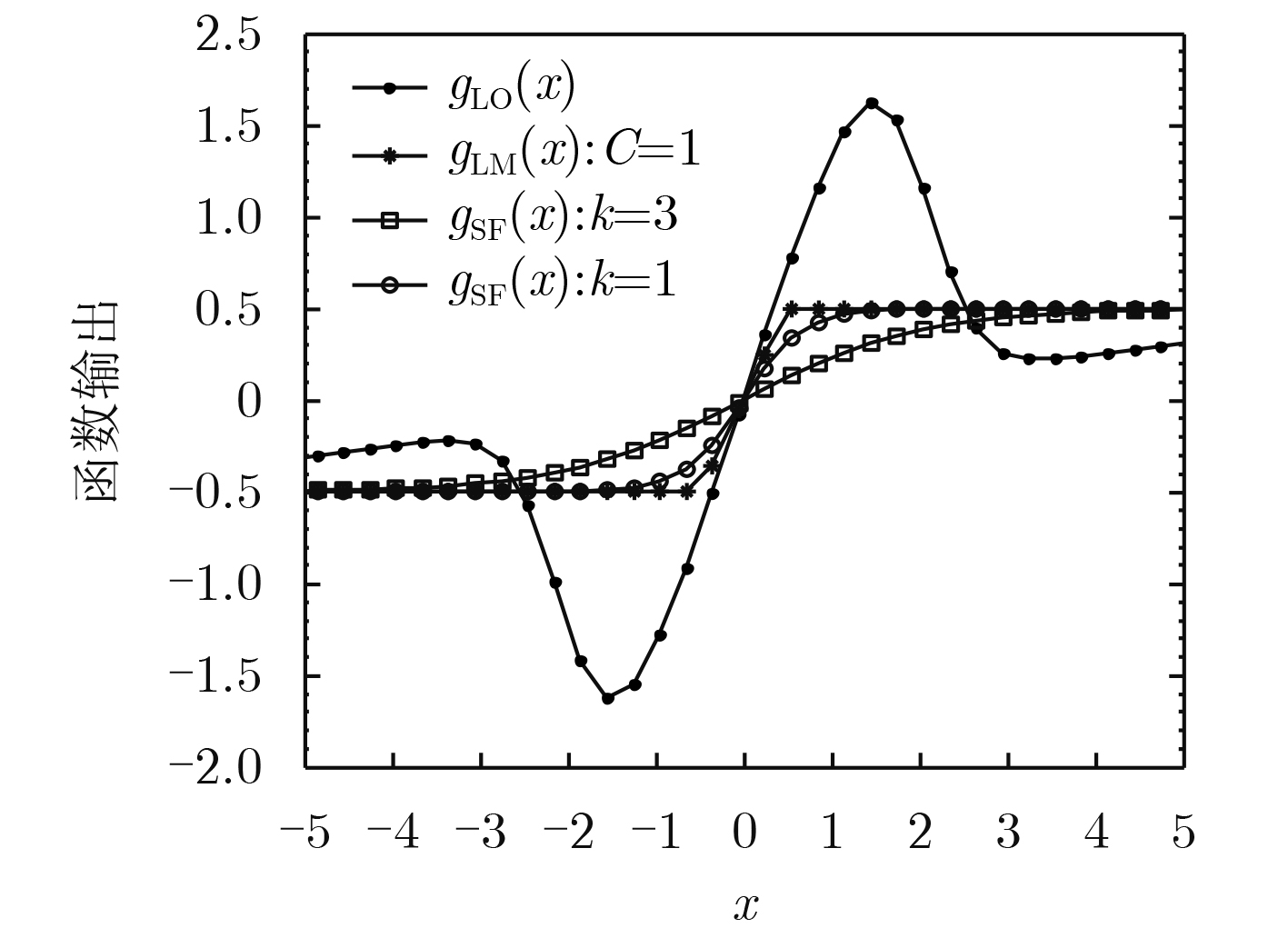
图 2
${g_{{\rm{SF}}}}\left( x \right)$ 与${g_{{\rm{LO}}}}\left( x \right)$ ,${g_{{\rm{LM}}}}\left( x \right)$ 对比 -
刘旺锁, 王平波, 顾雪峰. 混合高斯参数估计的两种EM算法比较[J]. 声学技术, 2014, 33(6): 539–543.LIU Wangsuo, WANG Pingbo, and GU Xuefeng. Comparison of two EM algorithms for Gaussian mixture parameter estimation[J]. Technical Acoustics, 2014, 33(6): 539–543. 张杨勇, 刘勇. 低频段大气噪声及处理技术[J]. 舰船科学技术, 2008, 30(S1): 85–88.ZHANG Yangyong and LIU Yong. Atmospheric-noise at low frequency and its processing technique[J]. Ship Science and Technology, 2008, 30(S1): 85–88. 沈锋, 徐定杰, 薛冰. 乘性噪声环境下基于局部最佳检测器的伪码捕获方法[J]. 电子与信息学报, 2009, 31(8): 1952–1956.SHEN Feng, XU Dingjie, and XUE Bing. PN Code acquisition based on the locally optimum detector in multiplicative noise channels[J]. Journal of Electronics &Information Technology, 2009, 31(8): 1952–1956. 沈锋, 孙枫. 弱相关非高斯环境下基于局部最佳检测器的伪码捕获方法[J]. 电子与信息学报, 2010, 32(4): 811–815.SHEN Feng and SUN Feng. PN Code acquisition based on the locally optimum detector in weakly dependent non-Gaussian impulsive channels[J]. Journal of Electronics &Information Technology, 2010, 32(4): 811–815. 郑作虎, 王首勇. 一种分数低阶局部最优目标检测方法[J]. 电子与信息学报, 2015, 37(9): 2158–2163.ZHENG Zuohu and WANG Shouyong. Target detection method based on fractional lower order locally optimum detector[J]. Journal of Electronics &Information Technology, 2015, 37(9): 2158–2163. LI Xutao, SUN Jun, WANG Shouyong, et al. Near-optimal detection with constant false alarm ratio in varying impulsive interference[J]. IET Signal Processing, 2013, 7(9): 824–832. doi: 10.1049/iet-spr.2013.0024 OH H and NAM H. Design and performance analysis of nonlinearity preprocessors in an impulsive noise environment[J]. IEEE Transactions on Vehicular Technology, 2017, 66(1): 364–376. doi: 10.1109/TVT.2016.2547889 MAHMOOD A, CHITRE M, and VISHNU H. Locally optimal inspired detection in snapping shrimp noise[J]. IEEE Journal of Oceanic Engineering, 2017, 42(4): 1049–1062. doi: 10.1109/JOE.2017.2731058 李旭杰, 赵鸿燕, 杨成胡. α稳定噪声中基于正态变换的次优接收机[J]. 电路与系统学报, 2012, 17(3): 94–97, 14. doi: 10.3969/j.issn.1007-0249.2012.03.018LI Xuejie, ZHAO Hongyan, and YANG Chenghu. Normalized transform based sub-optimal receiver in α-stable impulsive environment[J]. Journal of Circuits and Systems, 2012, 17(3): 94–97, 14. doi: 10.3969/j.issn.1007-0249.2012.03.018 陈志毅, 周穗华, 冯士民. 脉冲性大气噪声的高斯化滤波[J]. 数据采集与处理, 2013, 28(6): 784–789. doi: 10.3969/j.issn.1004-9037.2013.06.013CHEN Zhiyi, ZHOU Suihua, and FENG Shimin. Removal of impulsive atmosphere noise based on Gaussian filter[J]. Journal of Data Acquisition and Processing, 2013, 28(6): 784–789. doi: 10.3969/j.issn.1004-9037.2013.06.013 罗忠涛, 卢鹏, 张杨勇, 等. 大气噪声幅度分布与抑制处理分析[J]. 系统工程与电子技术, 2018, 40(7): 1443–1448.LUO Zhongtao, LU Peng, ZHANG Yangyong, et al. Analysis on amplitude distribution and suppression techniques of atmosphere noise[J]. Systems Engineering and Electronics, 2018, 40(7): 1443–1448. ILIEV A, KYURKCHIEV N, and MARKOV S. On the approximation of the step function by some sigmoid functions[J]. Mathematics and Computers in Simulation, 2017, 133: 223–234. doi: 10.1016/j.matcom.2015.11 宋宇鲲, 高晓航, 张多利, 等. Sigmoid函数的分段非线性拟合法及其FPGA实现[J]. 电子技术应用, 2017, 43(8): 49–51. doi: 10.16157/j.issn.0258-7998.170569SHONG Yukun, GAO Xiaohang, ZHANG Duoli, et al. The piecewise non-linear approximation of the sigmoid function and its implementation in FPGA[J]. Application of Electronic Technique, 2017, 43(8): 49–51. doi: 10.16157/j.issn.0258-7998.170569 王平波, 蔡志明. 有色非高斯背景下微弱信号的Rao有效绩检验[J]. 电子学报, 2007, 35(3): 534–538. doi: 10.3321/j.issn:0372-2112.2007.03.031WANG Pingbo and CAI Zhiming. The Rao efficient scores test of weak signals in colored non-Gaussian background[J]. Acta Electronica Sinica, 2007, 35(3): 534–538. doi: 10.3321/j.issn:0372-2112.2007.03.031 赵树杰, 赵建勋. 信号检测与估计理论[M]. 2版. 北京: 电子工业出版社, 2013: 58–59.ZHAO Shujie and ZHAO Jianxun. Signal Detection and Estimation Theory[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2013: 58–59. -

 下载:
下载:











图(6)
计量
- 文章访问数: 3716
- HTML全文浏览量: 1628
- PDF下载量: 96
- 被引次数: 0
