

Research on Autonomous Integrity Monitoring Performance of Vector GNSS Receiver
-
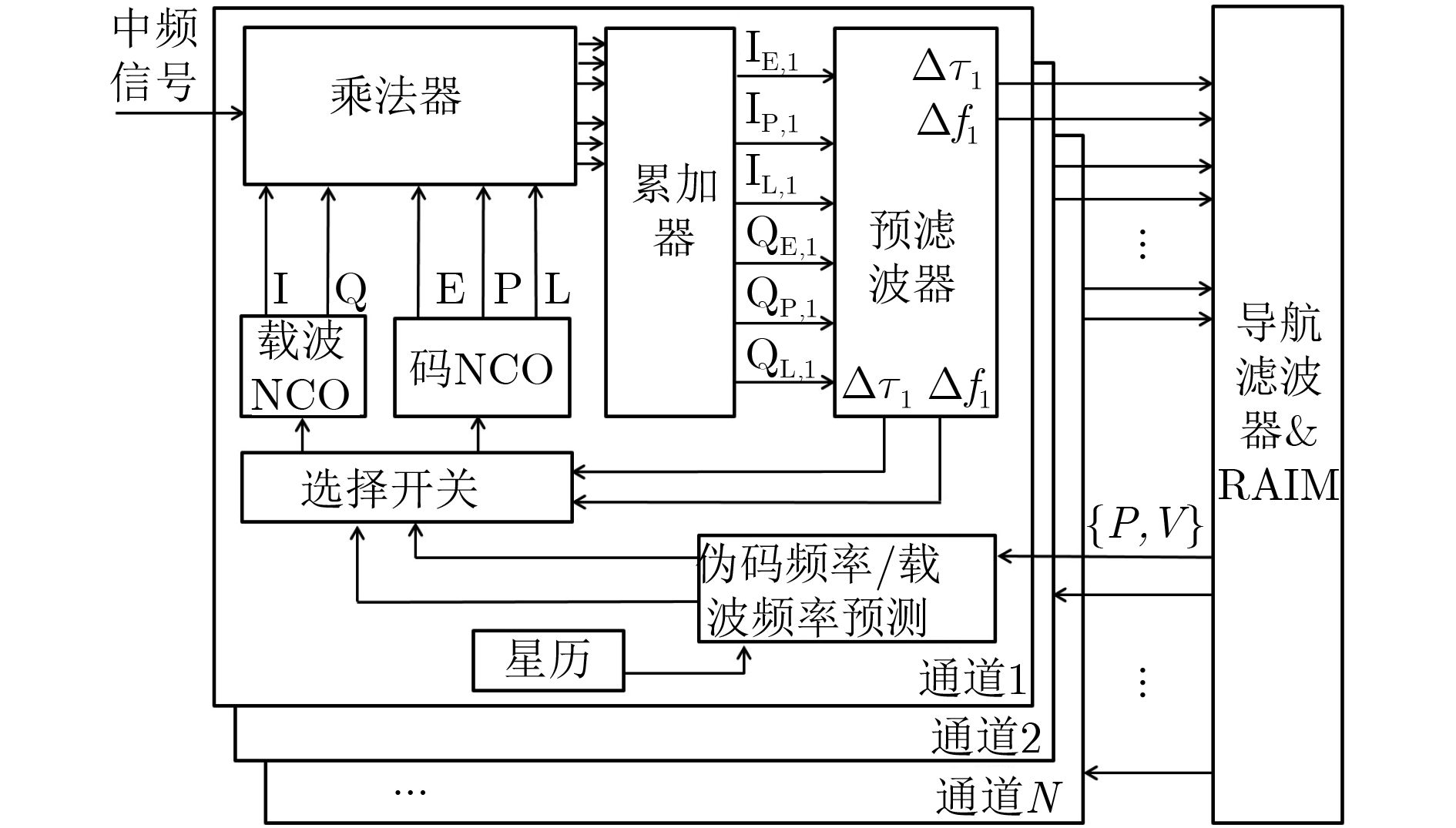
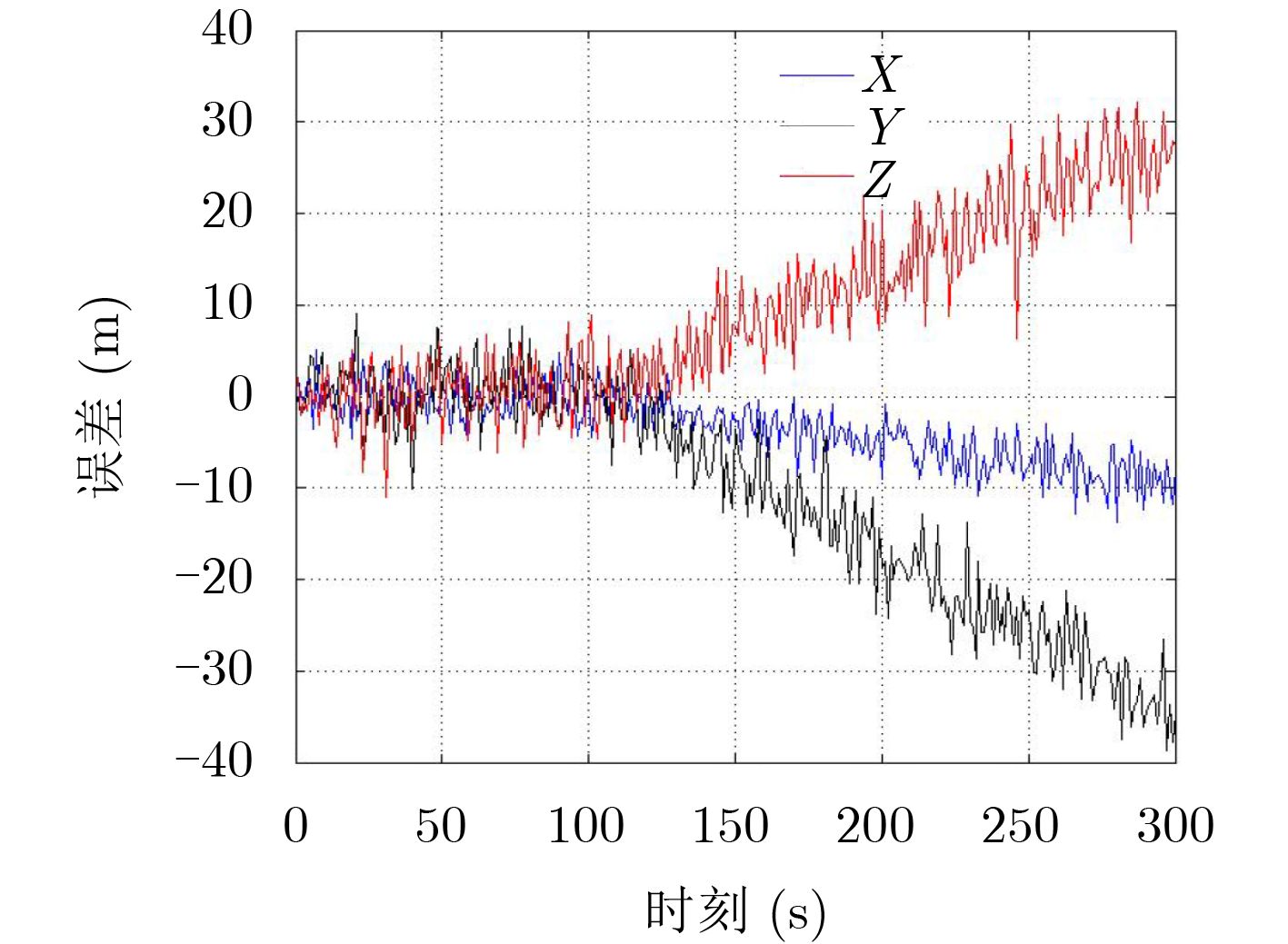
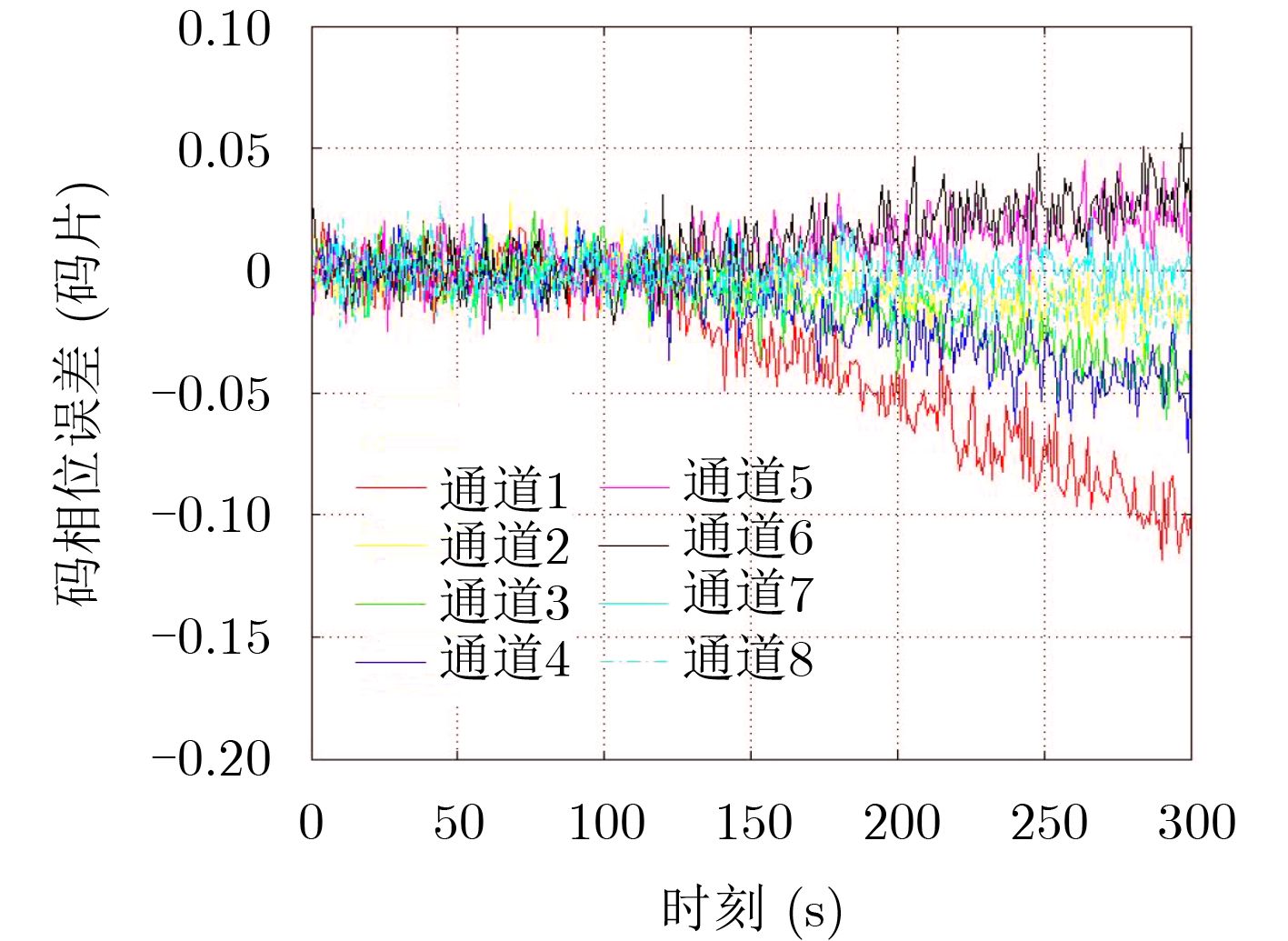
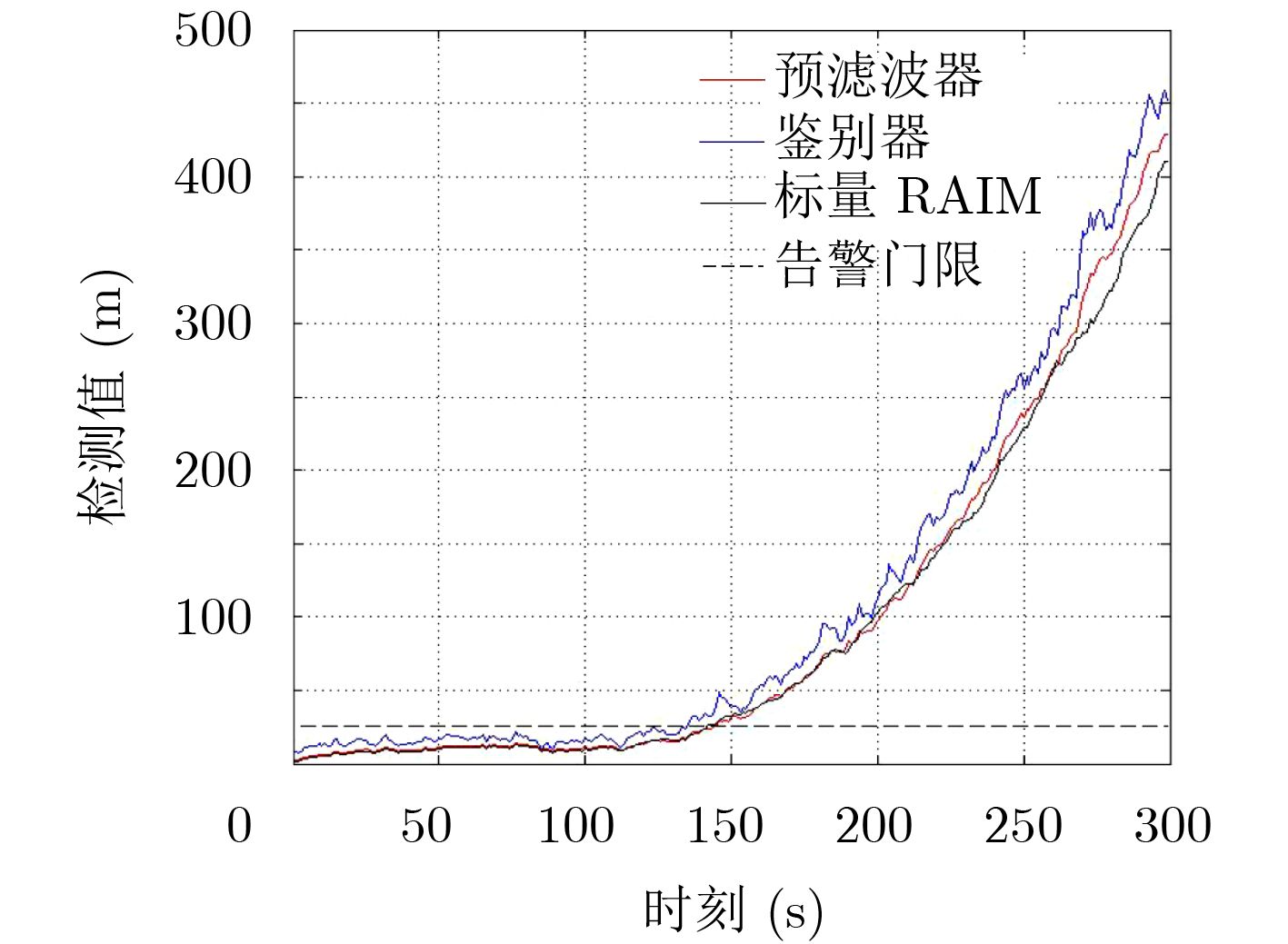
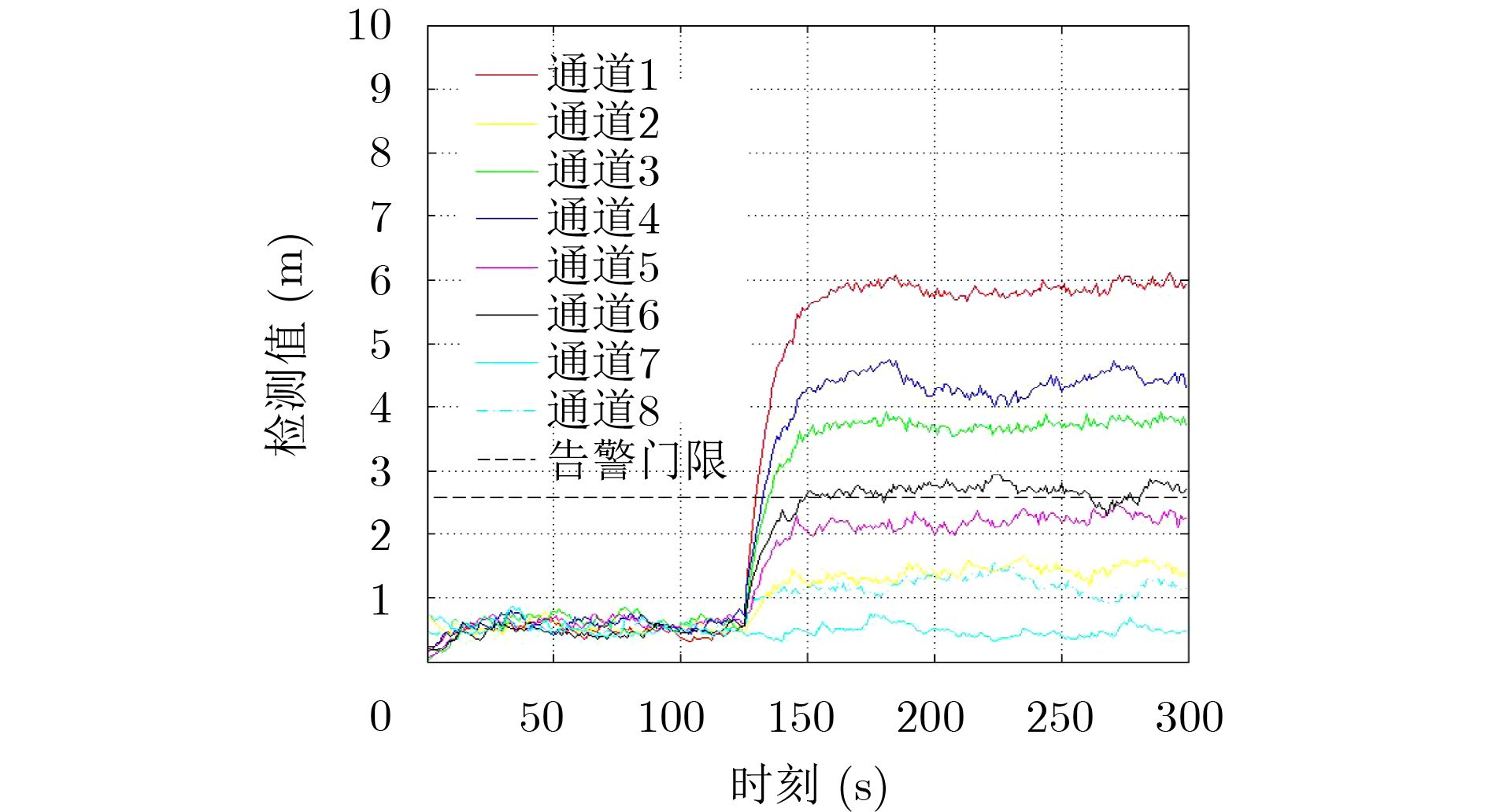
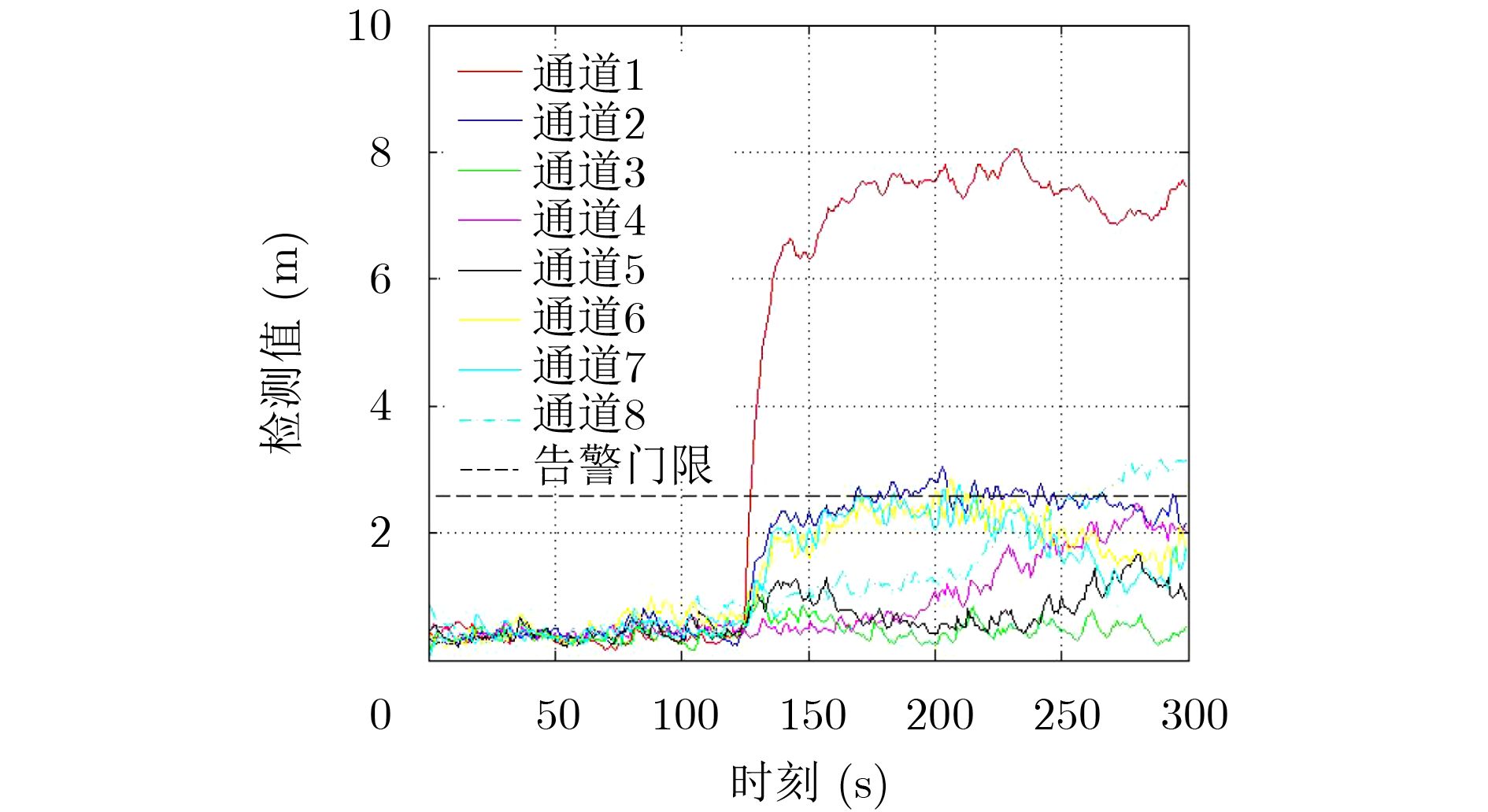
摘要: 在分析了矢量跟踪环路和标量跟踪环路故障检测方面差异的基础上,该文指出全球导航卫星系统(GNSS)矢量接收机自主完好性监控(RAIM)技术所存在的问题,即RAIM检测量受噪声影响导致检测故障不准确,和故障信息在环路中的传播使得难以准确识别出故障源。针对上述问题,对矢量接收机的结构进行了改进,提出基于预滤波器的双环路跟踪结构。在新结构中,通过基于容积卡尔曼滤波算法的预滤波器削弱噪声的影响,并通过双环路切换的方法阻止故障信息的传播。仿真实验结果表明,改进后的矢量接收机不仅RAIM检测统计量的均值和方差都显著减小,而且识别故障的准确率有了明显的提高,RAIM性能较原来得到了有效提升。
-
关键词:
- 全球导航卫星系统 /
- 矢量跟踪环路 /
- 接收机自主完好性监控 /
- 容积卡尔曼滤波
Abstract: Based on the analysis on the difference between vector tracking loop and scalar tracking loop on fault detection, it is pointed out that in vector receiver of Global Navigation Satellite System (GNSS), the detection statistic of Receiver Autonomous Integrity Monitoring (RAIM) algorithm is inaccurate because of the influence of noise, and the propagation of fault information in the loop makes it difficult to identify the fault source. To solve the problems, a double loop tracking structure based on pre-filter is proposed after modifying the structure of vector receiver. In the new receiver, the influence of noise is reduced by pre-filter based on cubature Kalman filtering algorithm, and the fault information is prevented from propagating to each other by switching the loop. Finally, the method is verified by simulation. Simulation results show that the improved vector receiver not only greatly reduces the mean and variance of RAIM detection statistics, but also improves the accuracy of fault identification. Thus, the performance of RAIM is significantly improved. -
LASHLEY M, BEVLY D M, and HUNG J Y. Performance analysis of vector tracking algorithms for weak GPS signals in high dynamics[J]. IEEE Journal of Selected Topics in Signal Processing, 2009, 3(4): 661–673. doi: 10.1109/JSTSP.2009.2023341 朱珍珍. 卫星导航矢量跟踪关键技术研究[D]. [博士论文]. 国防科学技术大学, 2011: 3–6.ZHU Zhenzhen. Research on key techniques of vector tracking for satellite navigation[D]. [Ph.D. dissertation]. National University of Defense Technology, 2011: 3–6. ALAM N, TIAN JIN, and KHAN F A. Theoretical performance analysis and comparison of VDFLL and traditional FLL tracking loops[C]. 2018 European Navigation Conference, Gothenburg, 2018: 46–53. PENG Senlin, MORTON Yu, and DI Ruihui. A multiple-frequency GPS software receiver design based on a vector tracking loop[C]. The IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, USA, 2012: 495–505. SUN Zhaoyan, WANG Xinlong, FENG Shaojun, et al. Design of an adaptive GPS vector tracking loop with the detection and isolation of contaminated channels[J]. GPS Solutions, 2017, 21(2): 701–713. doi: 10.1007/S10291-016-0558-5 WU Mouyan, DING Jicheng, LUO Zhibin, et al. The coherent vector tracking loop design with FDE algorithm for BDS signals[C]. 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference, Xi’an, China, 2017: 835–840. HENKEL P, GIGER K, and GUNTHER C. Multifrequency, multisatellite vector phase-locked loop for robust carrier tracking[J]. IEEE Journal of Selected Topics in Signal Processing, 2009, 3(4): 674–681. doi: 10.1109/JSTSP.2009.2025637 BHATTACHARYYA S and GEBRE-EGZIABHER D. Integrity monitoring with vector GNSS receivers[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 2779–2793. doi: 10.1109/TAES.2014.120376 BHATTACHARYYA S and GEBRE-EGZIABHER D. Vector loop RAIM in nominal and GNSS-stressed environments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1249–1268. doi: 10.1109/TAES.2013.120679 吴云. GNSS粗差检测的" 快照”法与" 滤波”法的比较研究[J]. 武汉大学学报: 信息科学版, 2010, 35(6): 649–652, 704. doi: 10.13203/j.whugis2010.06.024WU Yun. GNSS fault detection and identification performance comparison of snapshot and filtering[J]. Geomatics and Information Science of Wuhan University, 2010, 35(6): 649–652, 704. doi: 10.13203/j.whugis2010.06.024 秦永元, 张洪钺, 汪叔华. 卡尔曼滤波与组合导航原理[M]. 3版. 西安: 西北工业大学版社, 2015: 297–301.QIN Yongyuan, ZHANG Hongyue, and WANG Shuhua. Kalman Filtering and Principle of Integrted Navigation[M]. 3rd ed. Xi’an: Northwestern Polytechnical University Press, 2015: 297–301. AMANI E, DJOUANI K, DE BOER J R, et al. Adaptive and conjoint scalar-vector tracking loops for GNSS tracking robustness and positioning integrity[C]. 2017 European Navigation Conference, Lausanne, Switzerland, 2017: 1–13. doi: 10.1109/EURONAV.2017.7954168. 赵欣, 王仕成, 廖守亿, 等. 基于抗差自适应容积卡尔曼滤波的超紧耦合跟踪方法[J]. 自动化学报, 2014, 40(11): 2530–2540. doi: 10.3724/SP.J.1004.2014.02530ZHAO Xin, WANG Shicheng, LIAO Shouyi, et al. An ultra-tightly coupled tracking method based on robust adaptive cubature kalman filter[J]. Acta Automatica Sinica, 2014, 40(11): 2530–2540. doi: 10.3724/SP.J.1004.2014.02530 JULIER S J and UHLMANN J K. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004, 92(3): 401–422. doi: 10.1109/JPROC.2003.823141 ARASARATNAM I and HAYKIN S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254–1269. doi: 10.1109/TAC.2009.2019800 HUEMMER C, HOFMANN C, MAAS R, et al. Estimating parameters of nonlinear systems using the elitist particle filter based on evolutionary strategies[J]. IEEE/ACM Transactions on Audio, Speech, and Language Processing, 2018, 26(3): 595–608. doi: 10.1109/TASLP.2017.2788183 朱灿. 高灵敏度卫星导航接收机同步技术的研究[D]. [博士论文], 东南大学, 2017: 87–92.ZHU Can. Research on the synchronization techniques of high sensitivity GNSS receivers[D]. [Ph.D. dissertation], Southeast University, 2017: 87–92. HEWITSON S and WANG Jinling. GNSS receiver autonomous integrity monitoring with a dynamic model[J]. The Journal of Navigation, 2007, 60(2): 247–263. doi: 10.1017/S0373463307004134 -

 下载:
下载:




图(12)
计量
- 文章访问数: 2598
- HTML全文浏览量: 1134
- PDF下载量: 80
- 被引次数: 0
