

Cognitive Emotion Interaction Model of Robot Based on Game Theory
-
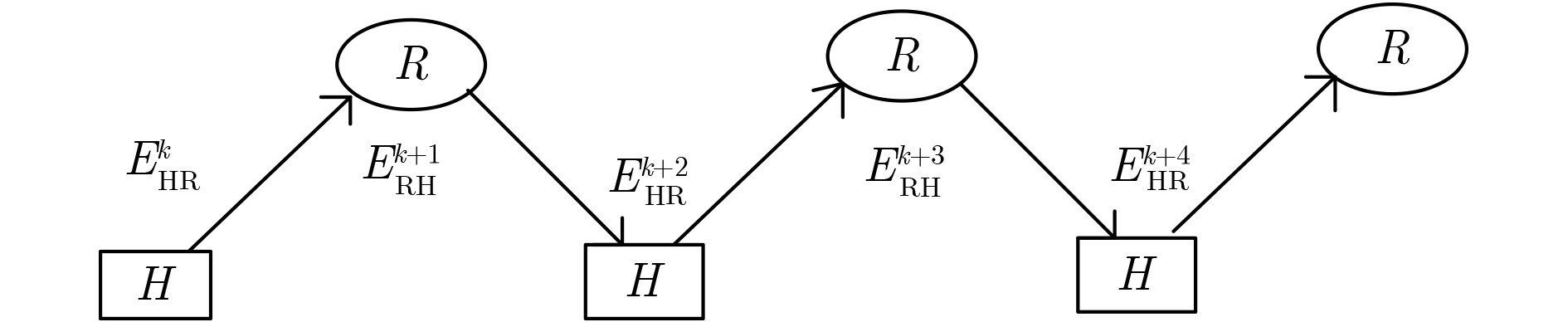
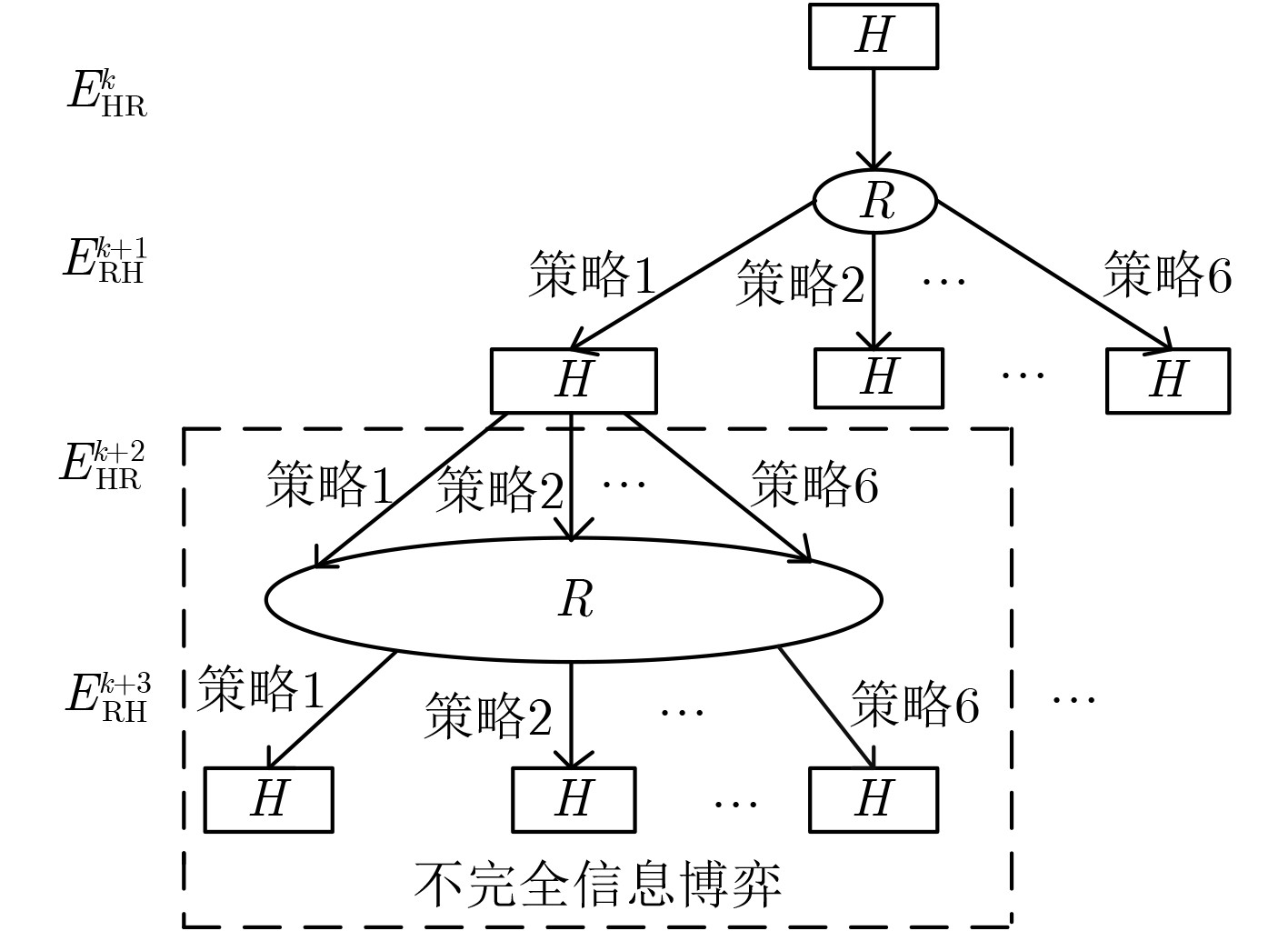
摘要: 针对现有的人机交互系统普遍存在情感缺失、参与人参与度不高的问题,该文依据PAD情感空间提出一种基于博弈的机器人认知情感交互模型。首先,对参与人的交互输入情感进行评估并分析当前人机交互关系,提取友好度和共鸣度2个影响因素。其次,模拟人际交往的心理博弈过程对参与人和机器人的情感生成过程进行建模,将嵌入博弈的子博弈完美均衡策略作为机器人的最优情感选择策略;最后,根据最优情感策略更新机器人的情感状态转移概率,并以6种基本情感的空间坐标为标签,得出受到情感刺激后机器人情感状态的空间坐标。实验结果表明,与其它认知交互模型相比,该文模型能够减少机器人对外界情感刺激的依赖并有效引导参与人参与人机交互,为机器人的情感认知建模提供了新的方法和思路。Abstract: To solve the problems of the existing in the process of human-computer interaction system, such as lack of emotion and low participation, a cognitive emotion interaction model based on game theory in PAD emotion space is proposed. Firstly, the interactive input emotion of participant is evaluated and some influence factors such as friendship and resonance are extracted to analyze the current human-computer interaction relationship. Secondly, modeling the emotional generation process of participants and robots by simulating the psychological game process in interpersonal communication, and the optimal emotional strategy of the robot is obtained by using the sub-game perfection equilibrium of the embedded game. Finally, the emotional state transition probability of the robot is updated according the optimal emotional strategy. The spatial coordinates of the six basic emotional states are used as labels to obtain the PAD spatial coordinate of the robot emotional state after emotional stimulate, The results of experiment show that compared with the others emotional interaction model, the proposed model can reduce the dependence of robots on external emotional stimuli and effective guide participants to participate in human-computer interaction, which provides some ideas for the emotion cognition model of robot in human-computer interaction.
-
表 1 基于博弈的机器人认知情感交互模型构建
输入:$k{{ - 1}}$次会话后友好度更新值$F(k - 1)$和机器人的情感状态转移概率${{\text{P}}_{\rm{R}}}(k - 1)$, $k$次会话参与人的交互输入情感${\text{E}}_{{\rm{HR}}}^k$; 输出:$k + 1$次会话时机器人的情感值${\text{E}}_{{\rm{RH}}}^{k{{ + 1}}}$; Repeat: 参与人输入交互情感${\text{E}}_{{\rm{HR}}}^k$; 根据式(1)—式(3)将${\text{E}}_{{\rm{HR}}}^k$评估转化为强度值向量${\text{P}}({\text{E}}_{{\rm{HR}}}^k)$; 根据式(8)—式(11)计算针对$k + 1$次会话机器人每种情感策略选择,预测$k + 2$次会话参与人每种情感策略选择,$k + 3$次会话机器人每种情
感策略下参与人和机器人的效用值;根据式(12),式(13)求解机器人的情感选择策略$s$; 通过最优情感策略$s$对机器人的情感状态转移概率进行更新,对机器人情感的空间坐标进行标定; 更新人机交互友好度,并令$k = k + 2$; Until 参与人停止输入交互情感; 人机交互会话结束。  下载: 导出CSV
下载: 导出CSV
表 2 不同认知模型的自动评价结果
模型 MRR MAP Seq2Seq 0.3836 0.4015 ChatterBot 0.4623 0.4923 MECs 0.5903 0.6091 GCRs 0.6269 0.6435 本文 0.6507 0.6756
下载: 导出CSV
表 3 参与人与不同认知模型作用下的机器人交互的次数与时间统计
机器人的认知模型 平均交互轮数(轮) 平均交互时间(s) Seq2Seq 9 98.32 ChatterBot 6 60.69 MECs 7 88.16 GCRs 10 110.38 本文 12 130.51
下载: 导出CSV
-
TURKER B B, YEMEZ Y, SEZGIN T M, et al. Audio-facial laughter detection in naturalistic dyadic conversations[J]. IEEE Transactions on Affective Computing, 2017, 8(4): 534–545. doi: 10.1109/TAFFC.2017.2754256 CHEN Min, HERRERA F, and HWANG K. Cognitive computing: Architecture, technologies and intelligent applications[J]. IEEE Access, 2018, 6: 19774–19783. doi: 10.1109/ACCESS.2018.2791469 ZUCCO C, CALABRESE B, and CANNATARO M. Sentiment analysis and affective computing for depression monitoring[C]. The 2017 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Kansas City, USA, 2017: 1988–1995. doi: 10.1109/BIBM.2017.8217966. BELKAID M, CUPERLIER N, and GAUSSIER P. Autonomous cognitive robots need emotional modulations: Introducing the eMODUL model[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 49(1): 206–215. doi: 10.1109/TSMC.2018.2792542 韩晶, 解仑, 刘欣, 等. 基于Gross认知重评的机器人认知情感交互模型[J]. 东南大学学报: 自然科学版, 2015, 45(2): 270–274. doi: 10.3969/j.issn.1001-0505.2015.02.014HAN Jing, XIE Lun, LIU Xin, et al. Cognitive emotion interaction model of robot based on Gross cognitive reappraisal[J]. Journal of Southeast University:Natural Science Edition, 2015, 45(2): 270–274. doi: 10.3969/j.issn.1001-0505.2015.02.014 LIU Xin, XIE Lun, and WANG Zhiliang. Empathizing with emotional robot based on cognition reappraisal[J]. China Communications, 2017, 14(9): 100–113. doi: 10.1109/CC.2017.8068769 ZHANG Rui, WANG Zhenyu, and MAI Dongcheng. Building emotional conversation systems using multi-task Seq2Seq learning[C]. The Sixth CCF International Conference on Natural Language Processing and Chinese Computing, Dalian, China, 2017: 612–621. doi: 10.1007/978-3-319-73618-1_51. RODRÍGUEZ L F, GUTIERREZ-GARCIA J O, and RAMOS F. Modeling the interaction of emotion and cognition in Autonomous Agents[J]. Biologically Inspired Cognitive Architectures, 2016, 17: 57–70. doi: 10.1016/j.bica.2016.07.008 NANTY A and GELIN R. Fuzzy controlled PAD emotional state of a NAO robot[C]. 2013 Conference on Technologies and Applications of Artificial Intelligence, Taipei, China, 2013: 90–96. doi: 10.1109/TAAI.2013.30. 曹东岩. 基于强化学习的开放领域聊天机器人对话生成算法[D]. [硕士论文], 哈尔滨工业大学, 2017.CAO Dongyan. Research on reinforcement learning for open domain chatbot dialogue generation[D]. [Master dissertation], Harbin Institute of Technology, 2017. ZHOU Hao, HUANG Minlie, ZHANG Tianyang, et al. Emotional chatting machine: Emotional conversation generation with internal and external memory[C]. The Thirty-Second AAAI Conference on Artificial Intelligence, New Orleans, USA, 2018: 730–738. 华生. 欲望心理学: 人际交往中的心理博弈[M]. 北京, 中央编译出版社, 2016: 1–5.HUA Sheng. Psychology on Desire: Psychological Game in Interpersonal Communication[M]. Beijing: Central Compilation & Translation Press, 2016: 1–5. 卜湛, 伍之昂, 曹杰, 等. 在线评论情感计算与博弈预测[J]. 电子学报, 2015, 43(12): 2530–2535. doi: 10.3969/j.issn.0372-2112.2015.12.028BU Zhan, WU Zhiang, CAO Jie, et al. Affective computing and game theory based prediction for online reviews[J]. Acta Electronica Sinica, 2015, 43(12): 2530–2535. doi: 10.3969/j.issn.0372-2112.2015.12.028 PARK J W, KIM W H, LEE W H, et al. How to completely use the PAD space for socially interactive robots[C]. 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 2011: 3005–3010. doi: 10.1109/ROBIO.2011.6181762. LI Jiaqi, ZHANG Chunyan, SUN Qinglin, et al. Changing the Intensity of Interaction Based on Individual Behavior in the Iterated Prisoner’s Dilemma Game[J]. IEEE Transactions on Evolutionary Computation, 2017, 21(4): 506–517. doi: 10.1109/TEVC.2016.2628385 MARTINICH L P. Top ten lessons for managers: Deep dive into interpersonal communication[J]. IEEE Engineering Management Review, 2017, 45(2): 27–29. doi: 10.1109/EMR.2017.2701511 SHANG Lifeng, LU Zhengdong, and LI Hang. Neural responding machine for short-text conversation[C]. The 53rd Annual Meeting of the Association for Computational Linguistics and the 7th International Joint Conference on Natural Language Processing, Beijing, China, 2015: 1577-1586. doi: 10.3115/v1/p15-1152. COX G. ChatterBot tutorial[EB/OL]. https://chatterbot.readthedocs.io/en/stable/tutorial.html, 2018. SUTSKEVER I, VINYALS O, and LE Q V. Sequence to sequence learning with neural networks[C]. The 27th International Conference on Neural Information Processing Systems, Montreal, Canada, 2014: 3104–3112. WU Yu, WU Wei, XING Chen, et al. Sequential matching network: A new architecture for multi-turn response selection in retrieval-based chatbots[C]. The 55th Annual Meeting of the Association for Computational Linguistics, Vancouver, Canada, 2017: 496–505. -

 下载:
下载:


图(4) / 表(3)
计量
- 文章访问数: 3327
- HTML全文浏览量: 1495
- PDF下载量: 135
- 被引次数: 0
