

Efficient Augmented ESPRIT-based Direction-of-Arrival Estimation Algorithm for Random Arrays
-
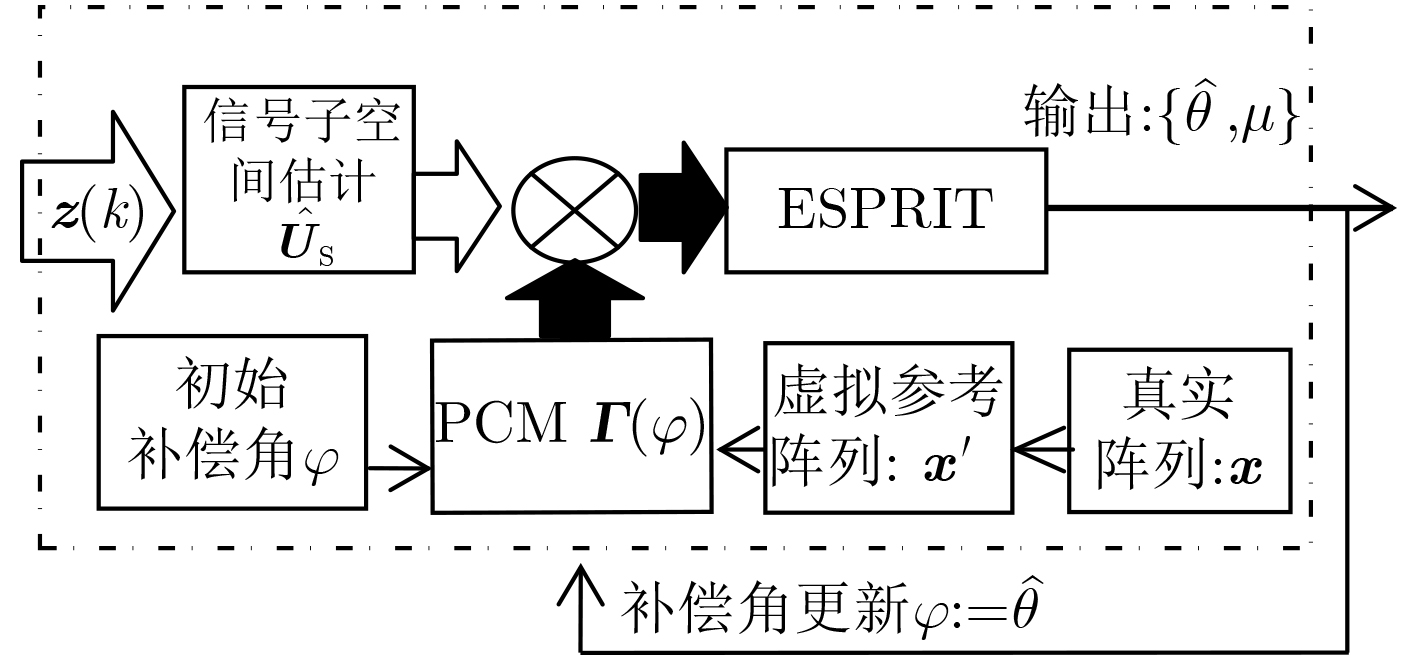
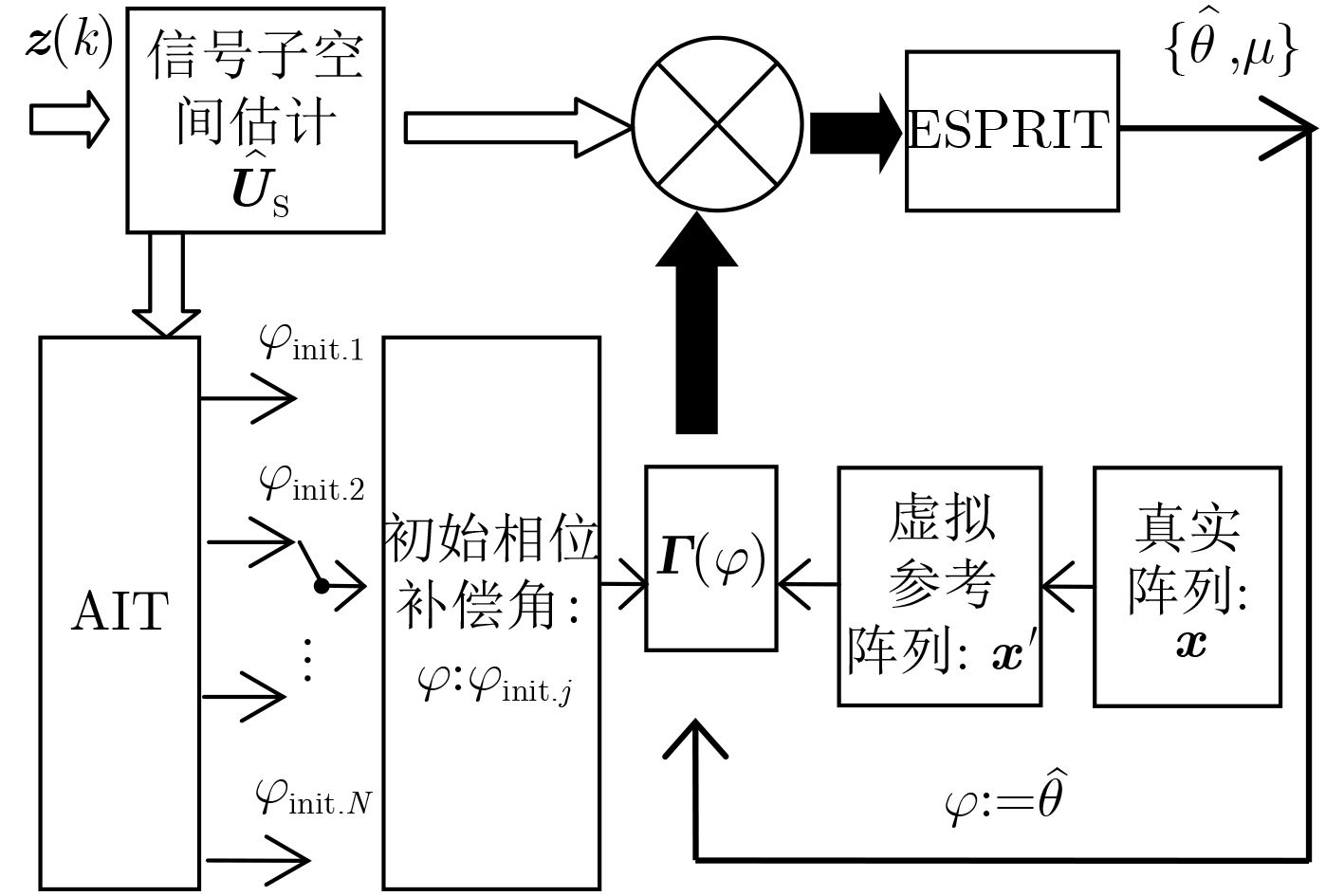
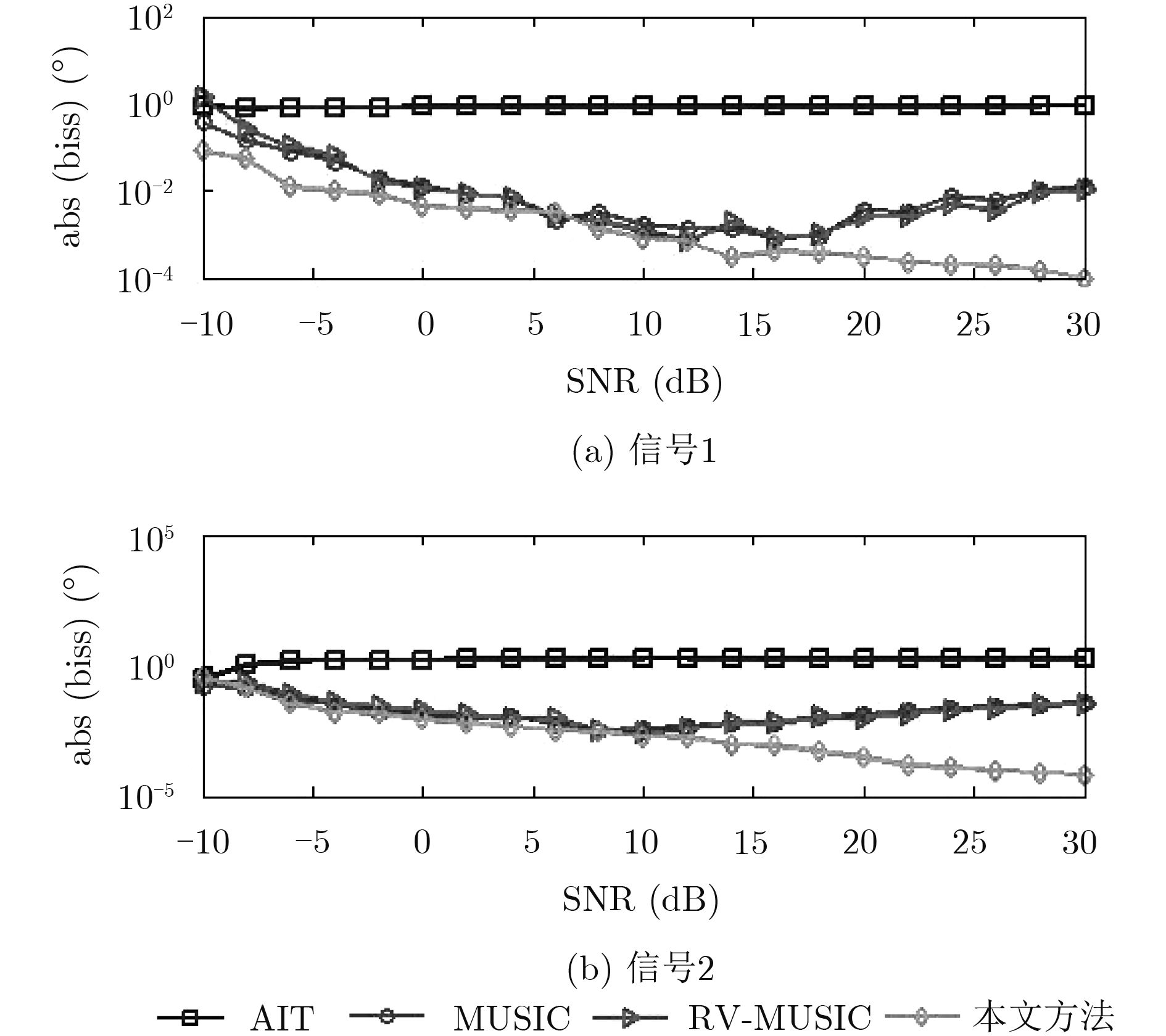
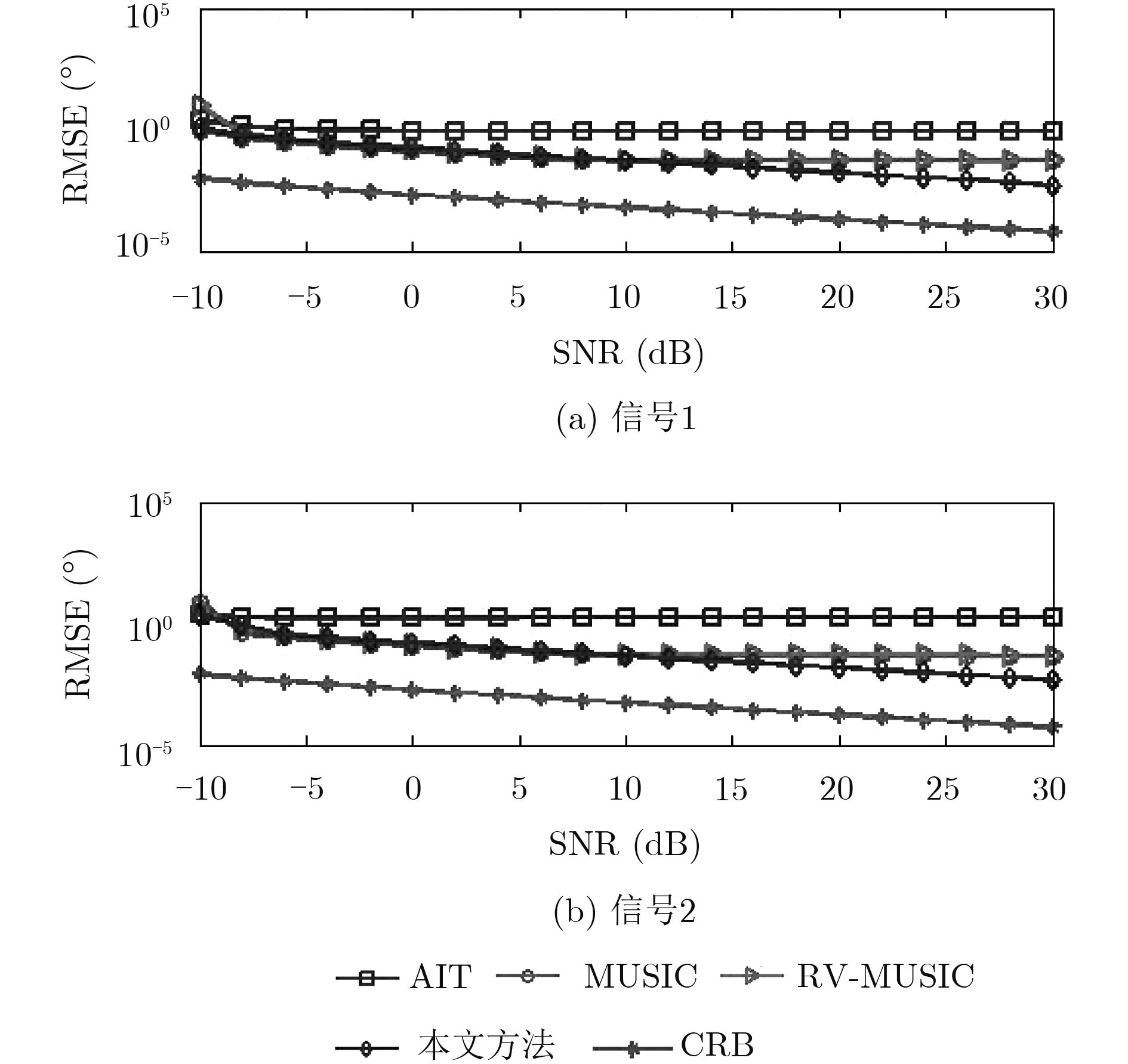
摘要: 获得随机阵列的高效、统计无偏波达方向(DoA)估计是超分辨率DoA估计领域的一大挑战。该文基于“利用旋转不变技术扩展估计信号参数法(AESPRIT)” 提出了一种随机阵列DoA估计算法。该算法将AESPRIT改造成闭合环结构,并使用阵列内插技术(AIT)提供的角度粗估计作为初始相位补偿角,从而通过迭代快速获得精确的DoA估计。所提算法直接给出代数形式的估计结果,具有低的计算复杂度;同时由于不存在流形映射或者模式截断误差,估计结果具有统计无偏性。仿真结果验证了所提算法的有效性。
-
关键词:
- 阵列信号处理 /
- 波达方向估计 /
- 随机阵列 /
- 利用旋转不变技术扩展估计信号参数法 /
- 阵列内插技术
Abstract: As for super resolution Direction-of-Arrival (DoA) estimation with random arrays, it is still challenged to obtain efficient and statistically unbiased estimates. Based on Augmented Estimation of Signal Parameters via Rotational Invariance Techniques (AESPRIT), an efficient DoA estimation algorithm is proposed for random arrays. AESPRIT is modified with a closed loop structure; Array Interpolation Technique (AIT) is utilized to provide the initial phase compensation angles to the loop. Therefore, the final DoA estimates can be calculated efficiently and accurately through iteration. The proposed algorithm gives algebraic solution directly and has low computational complexity. At the same time, the results are statistically unbiased because no manifold mapping or mode truncation error is introduced. Simulations verify the effectiveness of the proposed algorithm. -
MELVIN W L and SCHEER J A. Principles of Modern Radar, Vol II: Advanced Techniques[M]. Edison, USA: SciTech Publishing, 2013: 656–658. LI Jun, LIN Qiuhua, KANG Chunyu, et al. DOA estimation for underwater wideband weak targets based on coherent signal subspace and compressed sensing[J]. Sensors, 2018, 18(3): E902. doi: 10.3390/s18030902 张平, 陶运铮, 张治. 5G若干关键技术评述[J]. 通信学报, 2016, 37(7): 15–29.ZHANG Ping, TAO Yunzheng, and ZHANG Zhi. Survey of several key technologies for 5G[J]. Journal on Communications, 2016, 37(7): 15–29. JIN Yanhan, ZOU Yuexian, and RITZ C H. Robust speaker DOA estimation based on the inter-sensor data ratio model and binary mask estimation in the bispectrum domain[C]. Proceedings of 2017 IEEE International Conference on Acoustics, Speech and Signal Processing, New Orleans, USA, 2017: 3266–3270. XIA Z, BRENNAN N, CHAMBERLAND J F, et al. Real-time and near-real-time acquisition systems for measuring aliasing in small arrays based on crystal microstructures[C]. Proceedings of 2013 IEEE Radio and Wireless Symposium, Texas, USA, 2013: 64–66. FLIELLER A, LARZABAL P, and CLERGEOT H. Study of ambiguities in array manifold: a general framework[C]. Proceedings of the 8th Workshop on Statistical Signal and Array Processing, Corfu, Greece, 1996: 574–577. GAZZAH H, DELMAS J P, and LARSYS S M J. Direction-finding arrays of directional sensors for randomly located sources[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(4): 1995–2003. doi: 10.1109/TAES.2016.150655 VAN TREES H L. Optimum Array Processing: Part IV of Detection, Estimation and Modulation Theory[M]. New York, USA: Wiley-Interscience, 2002: 922–924. SCHMIDT R. Multiple emitter location and signal parameter estimation[J]. IEEE Transactions on Antennas and Propagation, 1986, 34(3): 276–280. doi: 10.1109/TAP.1986.1143830 ROY R and KAILATH T. ESPRIT-estimation of signal parameters via rotational invariance techniques[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1989, 37(7): 984–995. doi: 10.1109/29.32276 YAN Fenggang, JIN Ming, LIU Shuai, et al. Real-valued MUSIC for efficient direction estimation with arbitrary array geometries[J]. IEEE Transactions on Signal Processing, 2014, 62(6): 1548–1560. doi: 10.1109/TSP.2014.2298384 LIU Guohong, CHEN Hong, SUN Xiaoying, et al. Modified MUSIC algorithm for DOA estimation with Nyström approximation[J]. IEEE Sensors Journal, 2016, 16(12): 4673–4674. doi: 10.1109/JSEN.2016.2557488 WEISS A J and GAVISH M. Direction finding using ESPRIT with interpolated arrays[J]. IEEE Transactions on Signal Processing, 1991, 39(6): 1473–1478. doi: 10.1109/78.136564 BELLONI F, RICHTER A, and KOIVUNEN V. DoA estimation via manifold separation for arbitrary array structures[J]. IEEE Transactions on Signal Processing, 2007, 55(10): 4800–4810. doi: 10.1109/TSP.2007.896115 HUA Guang, WU Jiudong, ZHU Xicheng, et al. Efficient two-dimensional direction finding via auxiliary-variable manifold separation technique for arbitrary array structure[J]. Mathematical Problems in Engineering, 2015, 2015: 740513. doi: 10.1155/2015/740513 LIU Song, ZHANG Gang, WENG Mingjiang, et al. Unified ESPRIT spatial spectrum for Direction-of-Arrival estimation with an arbitrary sparse array[C]. Proceedings of the 2016 IEEE 13th International Conference on Signal Processing, Chengdu, China, 2016: 457–461. -


 下载:
下载:


图(6)
计量
- 文章访问数: 3550
- HTML全文浏览量: 1228
- PDF下载量: 110
- 被引次数: 0
