

Cluster-based Algorithm of Reconnaissance UAV Swarm Based on Wireless Ultraviolet Secret Communication
-
摘要:
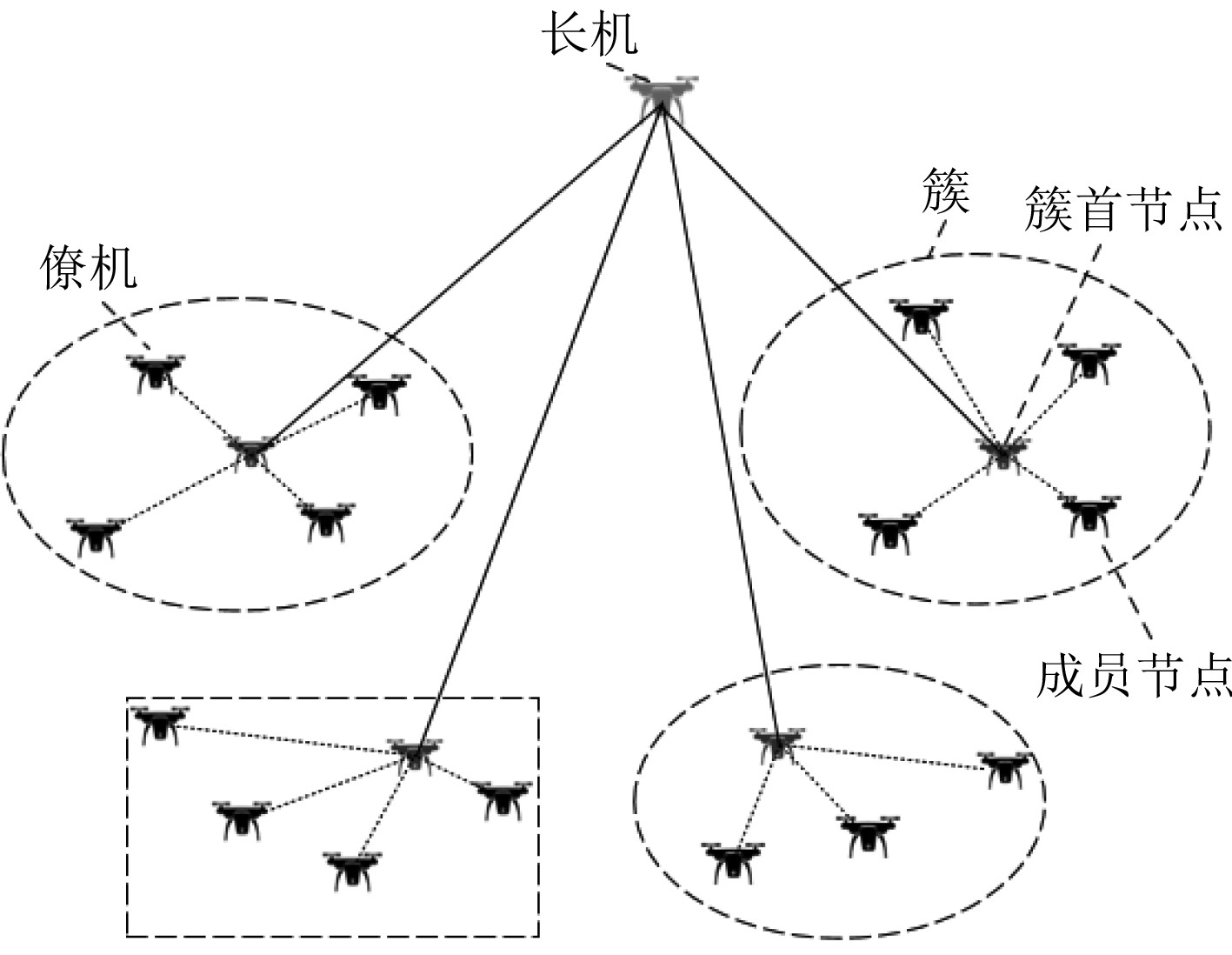
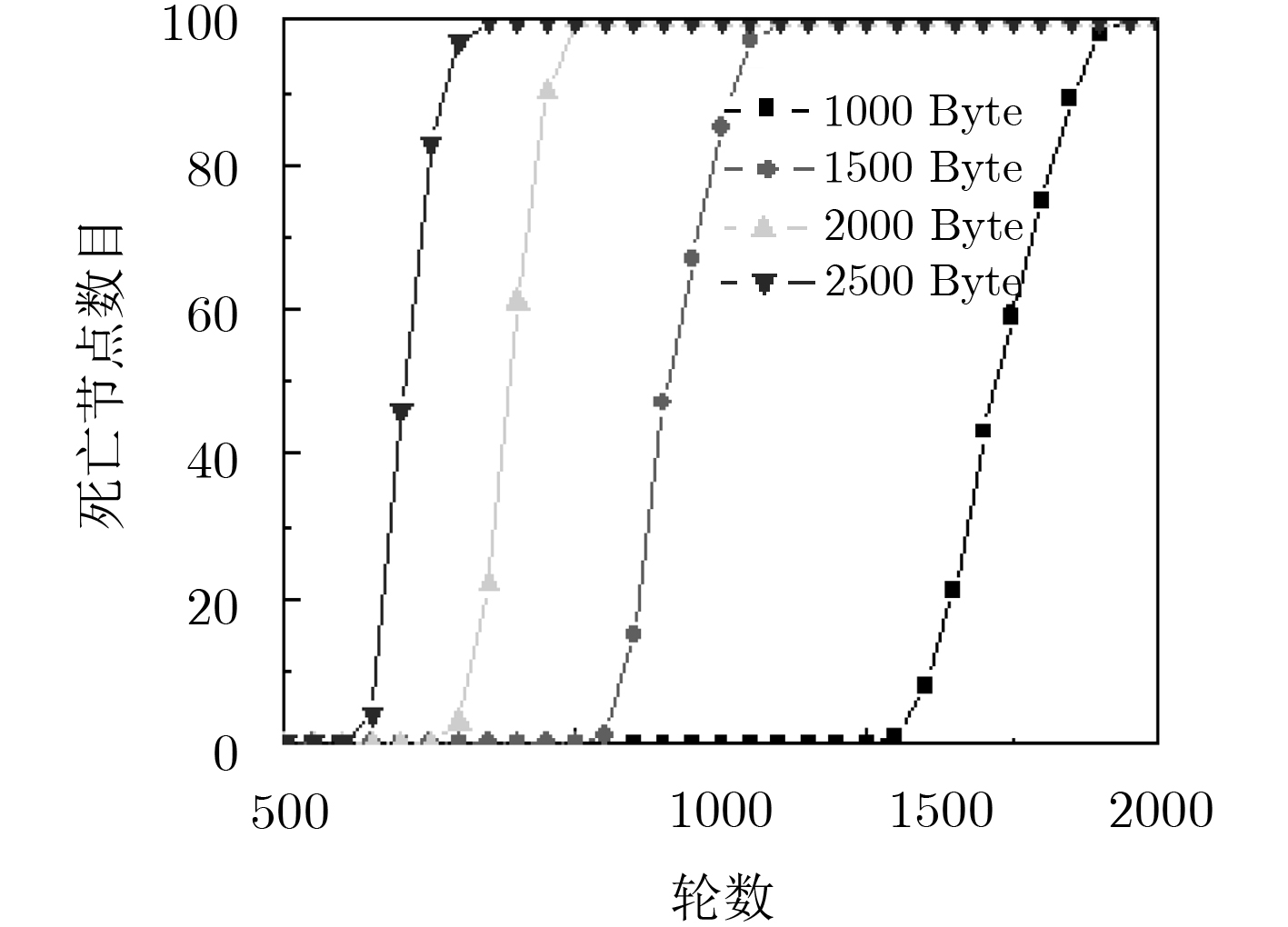
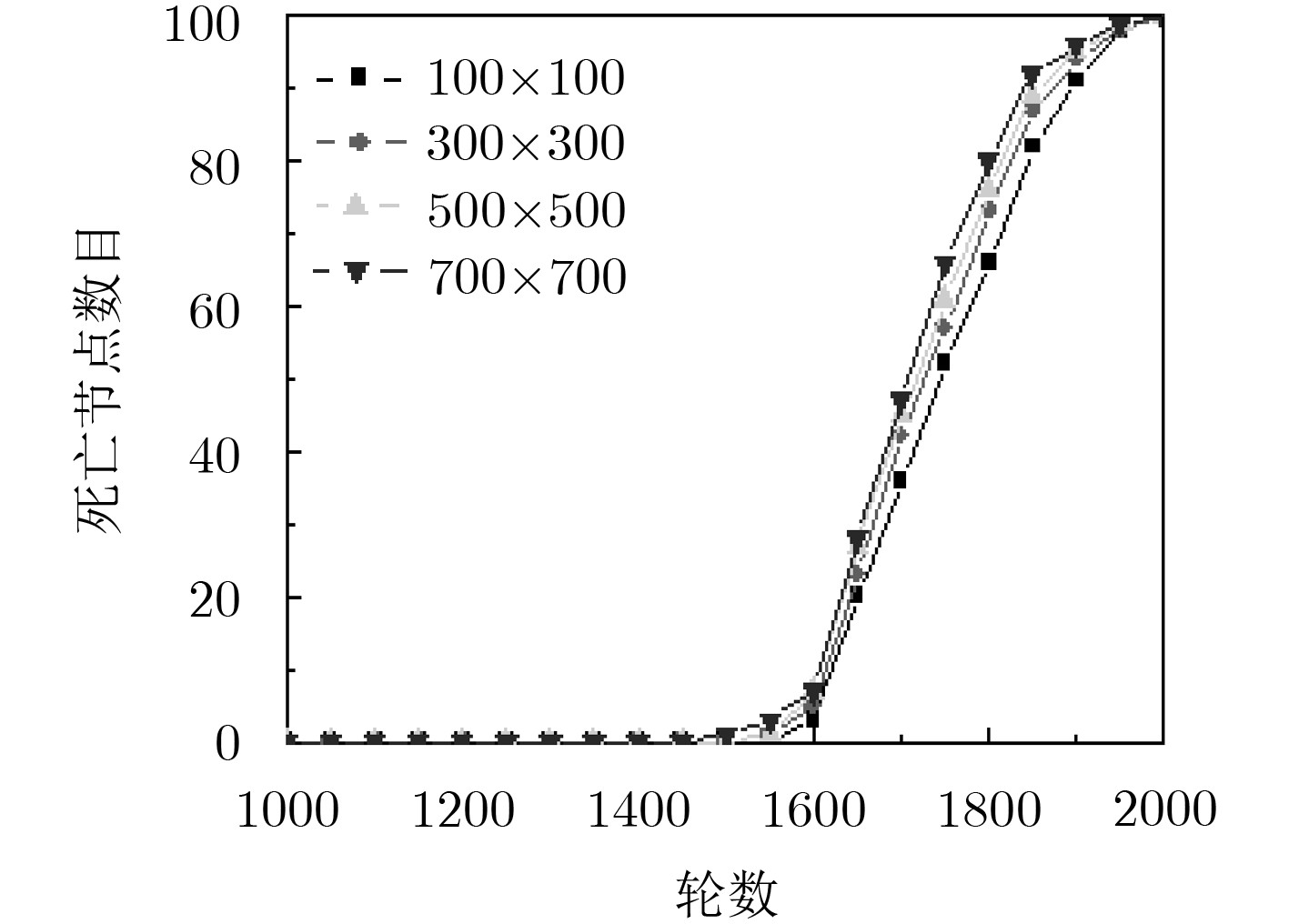
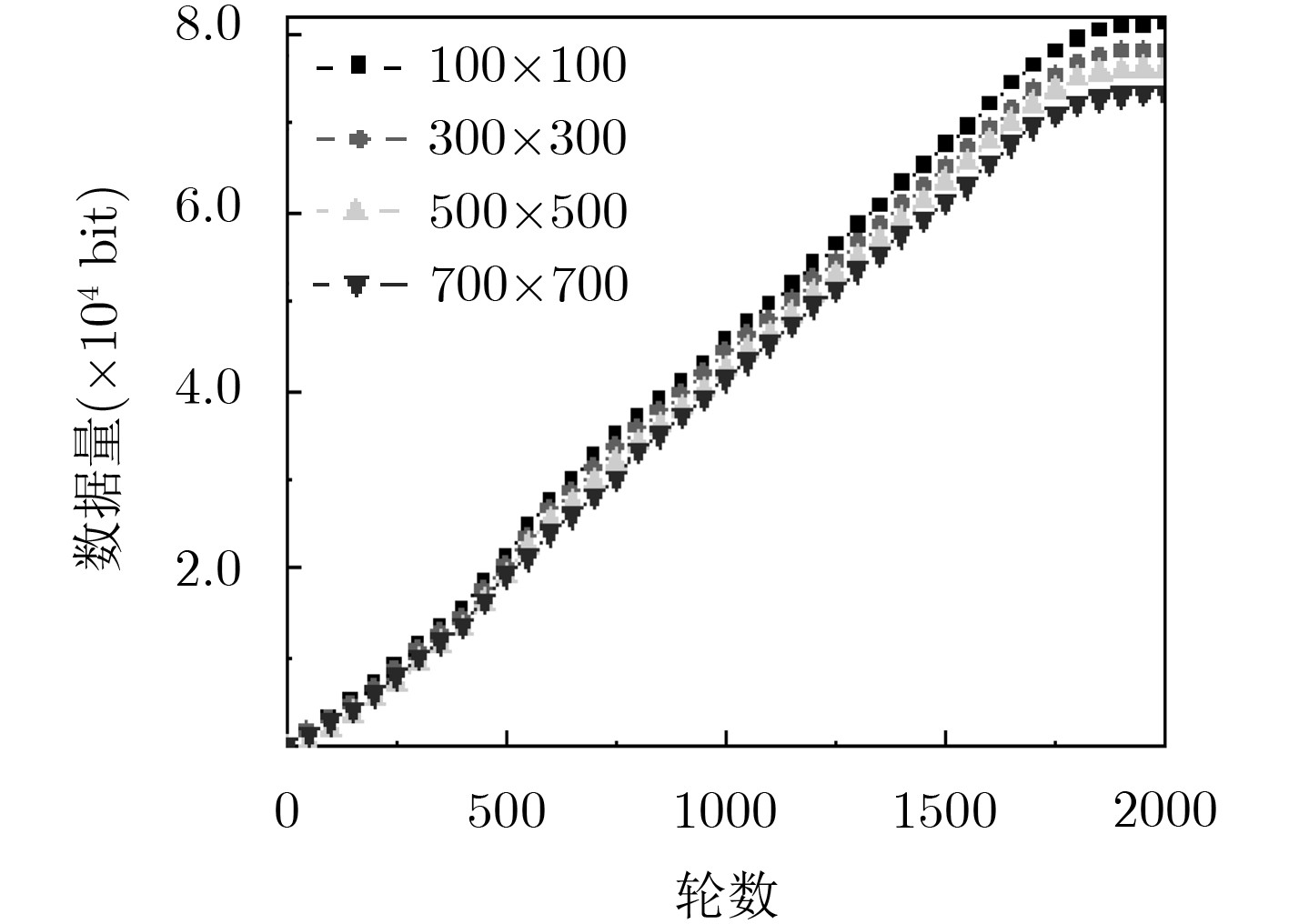
针对复杂战场环境下无人机(UAV)蜂群的渗透侦察任务,考虑无人机间信息传输时能量消耗的不均匀性,影响侦察任务的高效实施,该文提出一种基于无线紫外光隐秘通信的侦察UAV蜂群分簇算法。该算法结合无线紫外光散射通信的优点,通过分簇拓扑管理机制对UAV蜂群进行能耗平衡。仿真结果表明,与现有算法相比,所提算法能够有效均衡网络能量消耗,提高网络的传输效率,并且选取合适的数据包长度及节点密度可延长UAV蜂群的生存周期。
Abstract:Focusing on the reconnaissance mission of Unmanned Aerial Vehicle (UAV) swarm under complex battlefield environment, the non-uniform energy consumption during the information transmission between UAVs affects the efficient implementation of the reconnaissance mission, thus a cluster-based algorithm of reconnaissance UAV swarm based on wireless ultraviolet secret communication is proposed. Combined the advantages of wireless ultraviolet scattering communication, this algorithm uses cluster topology management mechanism to balance the energy consumption of UAV swarm. Simulation results show that the algorithm can effectively balance the network energy consumption and improve the transmission efficiency of the network when compared with the existing algorithm, and the lifetime of swarm can be extended when selecting the appropriate packet length and node density.
-
表 1 实验参数
参数 取值 节点数 100 节点通信能量 300 J ${E_T}$ 8.0 μJ ${E_R}$ 8.0 μJ ${E_{{\rm{DA}}}}$ 0.8 μJ 波长$\lambda $ 266 nm 吸收系数${k_a}$ $0.740 \times {10^{ - 3}}$ m–1 散射系数${k_s}$ $0.515 \times {10^{ - 3}}$ m–1 接收孔径面积${A_r}$ 1.92 cm2 瑞利散射相函数参数$\gamma $ 0.017 斜发收${\beta _t}$, ${\beta _r}$ 60° 斜发收${\theta _t}$, ${\theta _r}$ 15°  下载: 导出CSV
下载: 导出CSV
-
袁成. 蜂拥而至: 快速发展中的美军无人机蜂群[J]. 军事文摘, 2017(9): 30–33YUAN Cheng. Coming in great numbers: A rapidly developing U.S. UAV swarm[J]. Military Digest, 2017(9): 30–33 道格拉斯•威斯, 胡文翰. 中国大力发展无人机" 蜂群”作战能力[J]. 环球军事, 2017(22): 68DOUGLAS W and HU Wenhan. The rapid development of UAV swarm combat capability in China[J]. Global Military, 2017(22): 68 王桂胜, 任清华, 徐兵政, 等. 无人机作战数据链面临的通信干扰问题研究[C]. 中国空天安全会议, 中国辽宁, 2017: 5.WANG Guisheng, REN Qinghua, XU Bingzheng, et al. Research on communication interference problem faced by data link in UAV operations[C]. Chinese Aerospace Safety Symposium, Liaoning, China, 2017: 5. 罗畅. 非视距光通信信号处理研究与基带系统设计[D]. [博士论文], 中国科学院空间科学与应用研究中心, 2011.LUO Chang. The study of signal processing and design of base band system for non-line-of-sight optical communication[D]. [Ph.D. dissertation], National Space Science Center, Chinese Academy of Sciences, 2011. FAN Qiongjian, WANG Fengxian, SHEN Xiqiang, et al. Path planning for a reconnaissance UAV in uncertain environment[C]. IEEE International Conference on Control and Automation, Ohrid, Macedonia, 2016: 248–252. YU Yunlong, RU Le, FANG Kun, et al. Comprehensive mobility prediction based clustering algorithm for Ad hoc UAV networks[C] International Conference on Machinery, Materials and Computing Technology, Beijing, China, 2016: 601–614. PARK J H, CHOI S C, HUSSEN H R, et al. Analysis of dynamic cluster head selection for mission-oriented flying Ad hoc network[C] Ninth IEEE International Conference on Ubiquitous and Future Networks, Split, Croatia, 2017: 21–23. ZHAO Junwei and ZHAO Jianjun. Study on multi-UAV task clustering and task planning in cooperative reconnaissance[C]. Sixth IEEE International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 2014: 392–395. ZHANG Shihua, WANG Jingyuan, XU Zhiyong, et al. Attenuation analysis of long-haul NLOS atmospheric optical scattering communication[J]. Optics & Laser Technology, 2016(80): 51–55 doi: 10.1016/j.optlastec.2015.12.014 LUETTGEN M R, REILLY D M, and SHAPIRO J H. Non-line-of-sight single-scatter propagation model[J]. Journal of the Optical Society of America A, 1991, 8(12): 1964–1972 doi: 10.1364/JOSAA.8.001964 SHAW G A, NISCHAN M, IYENGAR M, et al. NLOS UV communication for distributed sensor systems[J]. SPIE, 2000, 4126: 83–87 doi: 10.1117/12.407519 DING Ying and TONG Shoufeng. A simplified NLOS UV communication model[C]. IEEE International Conference on Optoelectronics and Microelectronics, Jilin, China, 2012: 250–255. ZHAO Taifei and KE Xizheng. Monte Carlo simulations for non-line-of-sight ultraviolet scattering coverage area[J]. Acta Physica Sinica, 2012, 61(11): 114208-1–114208-68. XU Zhengyuan, DING Haipeng, SADLER B M, et al. Analytical performance study of solar blind non-line-of-sight ultraviolet short-range communication links[J]. Optics Letters, 2008, 33(16): 1860–1862 doi: 10.1364/OL.33.001860 YUAN Wen, CHEN Qingyang, HOU Zhongxi, et al. Multi-UAVs formation flight control based on leader-follower pattern[C]. IEEE Control Conference, Dalian, China, 2017: 1276–1281. LINDSEY S and RAGHAVENDRA C S. PEGASIS: Power efficient gathering in sensor information systems[C]. Proceedings of the IEEE Aerospace Conference , Big Sky, USA, 2002: 542–571. -


 下载:
下载:




计量
- 文章访问数: 2906
- HTML全文浏览量: 1497
- PDF下载量: 127
- 被引次数: 0
