

Wide Area Difference Calibration Algorithm Based on Virtual Reference Station for Tri-satellite TDOA Geolocation System
-
摘要:
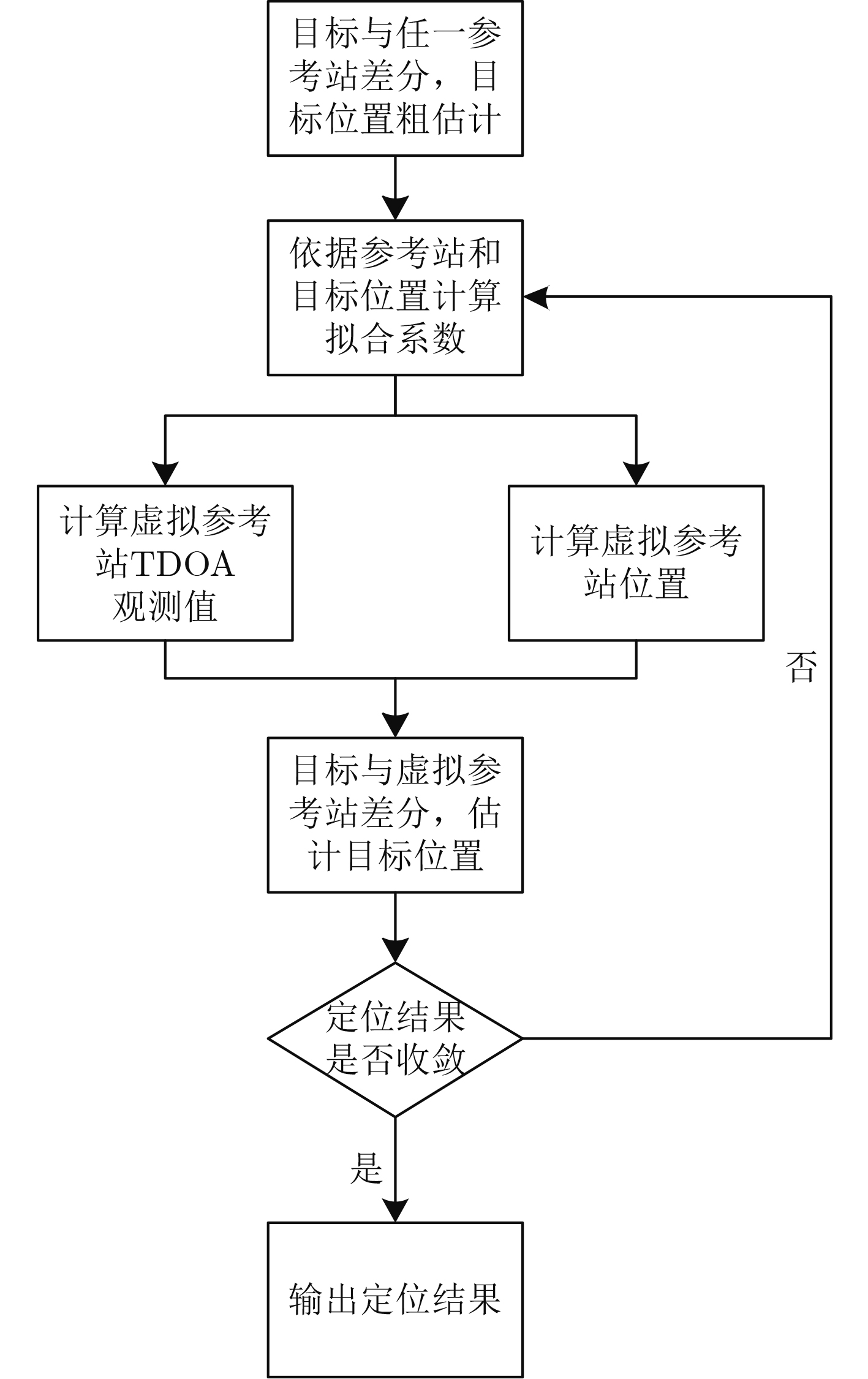
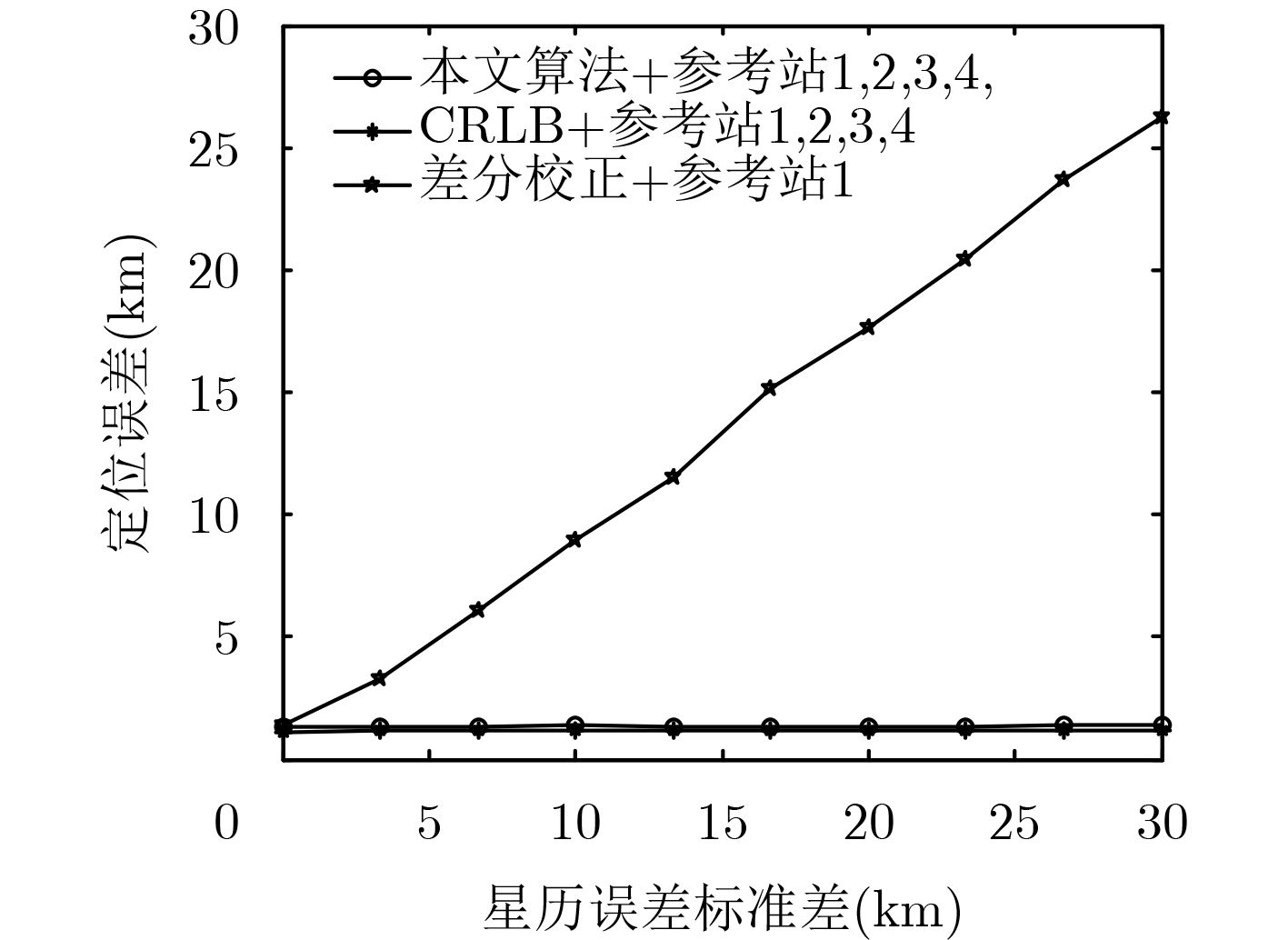
星历误差是导致同步三星时差定位系统定位误差的主要因素,该文针对传统差分校正算法在远离参考站区域对星历误差校正精度差的问题,提出一种基于虚拟参考站(VRS)的广域差分校正算法。首先证明两参考信号时差的差分残差近似为两参考站连线方向的线性函数;然后利用已有参考站的位置信息和参考信号的时差观测值,在目标辐射源位置处通过线性拟合构造一个VRS;最后将目标辐射源与VRS的时差观测值进行差分,从而实现对星历误差的高精度校正。仿真结果表明,相比传统差分校正算法,该方法可大范围消除星历误差对同步三星时差定位系统定位精度的影响,且定位精度可逼近CRLB。
-
关键词:
- 同步三星时差定位系统 /
- 星历误差 /
- 差分校正 /
- 虚拟参考站
Abstract:A wide area difference calibration algorithm based on Virtual Reference Station (VRS) for tri-satellite Time Difference Of Arrival (TDOA) geolocation system is proposed to solve the problem that traditional difference calibration algorithm can not eliminate the location error caused by ephemeris error completely, especially when the emitter source is far away from the calibration station. Firstly, TDOA measurements of the VRS, which is in the vicinity of emitter source, is estimated by using TDOA measurements of reference station. Then, in order to remove the effect of ephemeris error and synchronization error on location error, TDOA measurements of the VRS is subtracted from that of emitter source. Simulation results demonstrate that the proposed algorithm can almost eliminate the effect of ephemeris error on location error of tri-satellite TDOA geolocation system in wide area.
-
表 1 仿真场景
名称 经度(°) 纬度(°) 高程(km) 辐射源 130.00 30.00 0.00 参考站1 120.00 40.00 0.00 参考站2 120.00 20.00 0.00 参考站3 140.00 35.00 0.00 参考站4 110.00 30.00 0.00 卫星1 100.00 0.00 35788.12 卫星2 110.00 0.00 35788.12 卫星3 140.00 0.26 35788.12  下载: 导出CSV
下载: 导出CSV
-
OUYANG Xinxin, WAN Qun, CAO Jingmin, et al. Direct TDOA geolocation of multiple frequency-hopping emitters in flat fading channels[J]. IET Signal Processing, 2017, 11(1): 80–85. doi: 10.1049/iet-spr.2016.0299 SHAN Changxu, YANG Le, LIU Yang, et al. TDOA-FDOA source geolocation using moving horizon estimation with satellite location errors[C]. IEEE Pacific Rim Conference on Communications, Computers and Signal Processing, Wuxi, China, 2017: 1–6. doi: 10.1109/PACRIM.2017.8121932. JUAN ANTONIO G F, ANTONIO J N, MARIANO F N, et al. A comparative study between iterative algorithms for TDOA based geolocation techniques in real UMTS networks[J]. Mobile Networks and Applications, 2017, 1(2): 1–9. doi: 10.1007/s11036-017-0952-4 房嘉奇, 冯大政, 李进. 稳健收敛的时差频差定位技术[J]. 电子与信息学报, 2015, 37(4): 798–803. doi: 10.11999/JEIT140560FANG Jiaqi, FENG Dazheng, and LI Jin. A robustly convergent algorithm for source localization using time difference of arrival and frequency difference of arrival[J]. Journal of Electronics &Information Technology, 2015, 37(4): 798–803. doi: 10.11999/JEIT140560 MA Zhenhua and HO K C. A study on the effects of sensor position error and the placement of calibration emitter for source localization[J]. IEEE Transactions on Wireless Communications, 2014, 13(10): 5440–5452. doi: 10.1109/TWC.2014.2341609 WANG Ding, WEI Shuai, and WU Ying. A performance analysis of multi-satellite joint geolocation[J]. Front Inform Technol Electron Eng, 2016, 17(12): 1360–1387. doi: 10.1631/FITEE.1500285 WANG Yue and HO K C. TDOA source localization in the presence of synchronization clock bias and sensor position errors[J]. IEEE Transactions on Signal Processing, 2013, 61(18): 4532–4544. doi: 10.1109/TSP.2013.2271750 YANG Le and HO K C. On using multiple calibration emitters and their geometric effects for removing sensors position errors in TDOA localization[C]. IEEE International Conference on Acoustics Speech and Signal Processing, Dallas, USA, 2010: 2702–2705. doi: 10.1109/ICASSP.2010.5496241. LI Jinzhou, PANG Hongwei, GUO Fucheng, et al. Localization of multiple disjoint sources with prior knowledge on source locations in the presence of sensor location errors[J]. Digital Signal Processing, 2015, 40: 181–197. doi: 10.1016/j.dsp.2015.02.003 孙顺, 董凯, 齐林, 等. 基于TDOA与GROA的多运动站误差配准算法[J]. 电子与信息学报, 2017, 39(6): 1139–1145. doi: 10.11999/JEIT160562SUN Shun, DONG Kai, QI Lin, et al. Multiple moving observers registration algorithm based on TDOA and GROA[J]. Journal of Electronics &Information Technology, 2017, 39(6): 1139–1145. doi: 10.11999/JEIT160562 YANG Le and HO K C. Alleviating sensor position error in source localization using calibration emitters at inaccurate locations[J]. IEEE Transactions on Signal Processing, 2010, 58(1): 67–83. doi: 10.1109/TSP.2009.2028947 LIU Chao, YANG Le, and MIHAYLOVA L. Dual-satellite source geolocation with time and frequency offsets and satellite location errors[C]. The 20th International Conference on Information Fusion, Xi'an, China, 2017: 682–689. doi: 10.23919/ICIF.2017.8009716. 王莹桂, 李腾, 陈振林, 等. 三星时差定位系统的四站标定方法[J]. 宇航学报, 2010, 31(5): 1352–1356. doi: 10.3873/j.issn.1000-1328.2010.05.016WANG Yinggui, LI Teng, CHEN Zhenlin, et al. Tri-satellite TDOA location system-based four station calibration technique[J]. Journal of Astronautics, 2010, 31(5): 1352–1356. doi: 10.3873/j.issn.1000-1328.2010.05.016 LI Jinzhou, GUO Fucheng, YANG Le, et al. On the use of calibration sensors in source localization using TDOA and FDOA measurements[J]. Digital Signal Processing, 2014, 27: 33–43. doi: 10.1016/j.dsp.2013.12.011 HO K C and YANG Le. On the use of a calibration emitter for source localization in the presence of sensor position uncertainty[J]. IEEE Transactions on Signal Processing, 2008, 56(12): 5758–5772. doi: 10.1109/TSP.2008.929870 -

 下载:
下载:







计量
- 文章访问数: 2667
- HTML全文浏览量: 828
- PDF下载量: 52
- 被引次数: 0
