

Steering Vector and Covariance Matrix Joint Iterative Estimations for Robust Beamforming
-
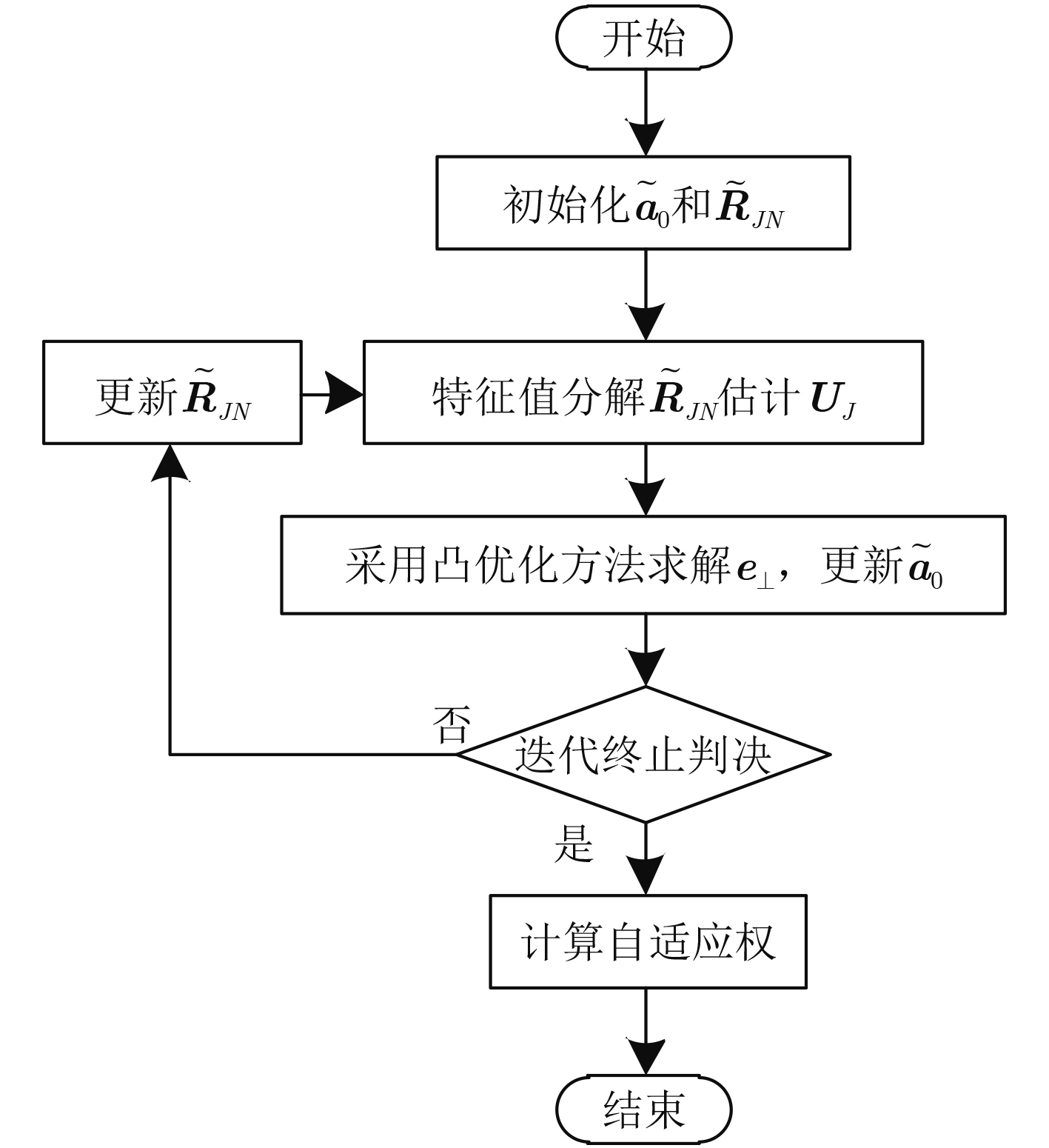
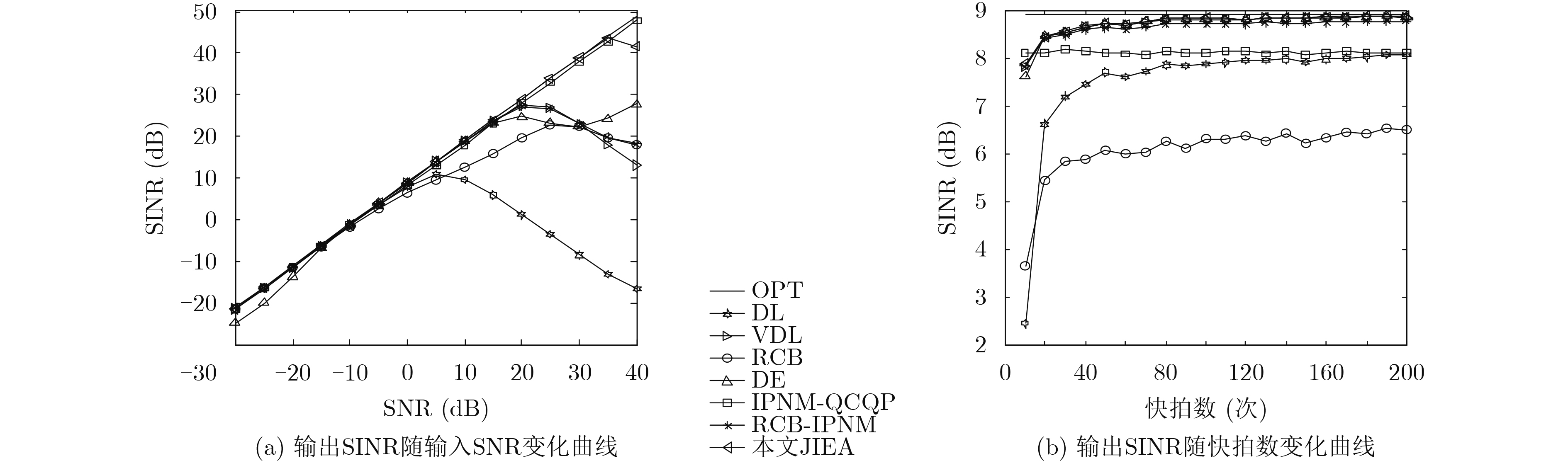
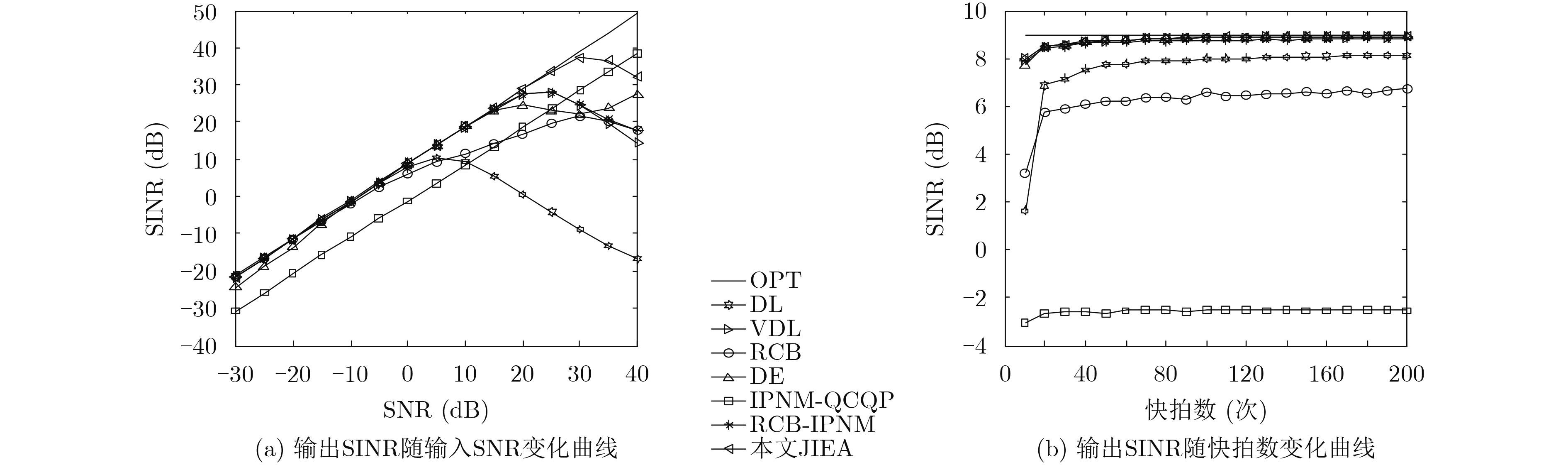
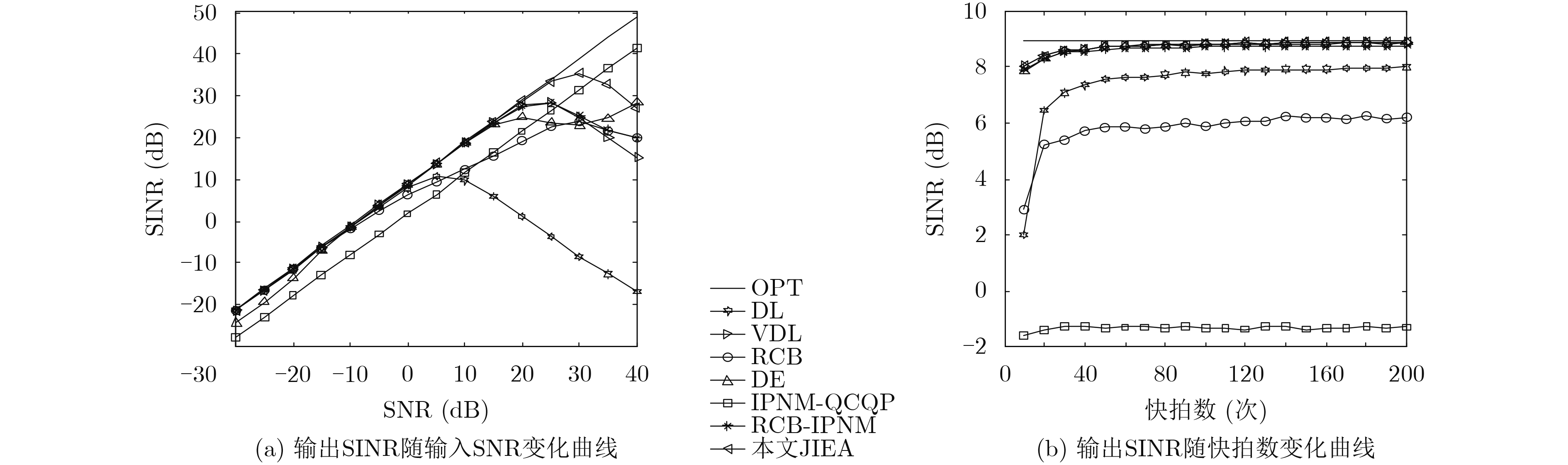
摘要: 针对自适应波束形成器在目标导向矢量存在约束偏差时性能急剧下降的问题,该文提出一种目标导向矢量和干扰噪声协方差矩阵联合迭代估计的稳健波束形成算法。该算法首先采用稀疏重构的方法得到目标导向矢量的初始值,并通过从采样协方差矩阵中剔除目标信号估计值完成干扰加噪声协方差矩阵的初始化;然后在建立导向矢量误差优化模型的基础上,采用凸优化方法对目标导向矢量和干扰加噪声协方差矩阵联合迭代求解。最后利用目标导向矢量和干扰加噪声协方差矩阵的稳态估计值获得自适应权矢量。仿真结果表明该算法提高了波束形成器在目标导向矢量约束偏差时的输出信干噪比。Abstract: Focusing on the problem of adaptive beamformer performance decreasing due to target steering vector constraint errors, an algorithm for robust beamforming with joint iterative estimations of steering vector and covariance matrix is proposed. First, the initial value of target steering vector is obtained by sparse reconstruction, following eliminating the target signal estimation in the sampling covariance matrix, the initialization of the covariance matrix is completed; Then, basing on the steering vector error optimization model, this algorithm adopts the convex optimization to estimate joint-iteratively target steering vector and interference plus noise covariance matrix. Finally, the adaptive weight vector is obtained with the steady estimations of steering vector and covariance matrix. Simulation results show output signal to interference and noise ratio is improved in the situation of target steering vector constraint errors.
-
KHABBAZIBASMENJ A, VOROBYOV S A, and HASSANIEN A. Robust?adaptive?beamforming?based on steering vector estimation with as little as possible prior information[J]. IEEE Transactions on Signal Processing, 2012, 60(6): 2974–2987 doi: 10.1109/TSP.2012.2189389 SHAHBAZPANAHI S, GERSHMAN A B, LUO Zhiquan, et al. Robust adaptive beamforming for general-rank signal models[J]. IEEE Transactions on Signal Processing, 2003, 51(9): 2257–2269 doi: 10.1109/TSP.2003.815395 VOROBYOV S A, GERSHMAN A B, and LUO Zhiquan. Robust Adaptive beamforming using worst case performance optimization: A solution to the signal mismatch problem[J]. IEEE Transactions on Signal Processing, 2003, 51(2): 313–323 doi: 10.1109/TSP.2002.806865 CARLSON B D. Covariance matrix estimation errors and diagonal loading in adaptive arrays[J]. IEEE Transactions on Aerospace and Electronic Systems, 1988, 24(4): 397–401 doi: 10.1109/7.7181 STOICA P, LI Jian, ZHU Xumin, et al. On using a prior knowledge in space-time adaptive processing[J]. IEEE Transactions on Signal Processing, 2008, 56(6): 2598–2602 doi: 10.1109/TSP.2007.914347 ZHUANG Jie. Low-complexity variable loading for robust adaptive beamforming[J]. Electronics Letters, 2016, 52(5): 338–340 doi: 10.1049/el.2015.3844 LI Wenxing, YANG Bin, and ZHAO Yu. Low-complexity non-uniform diagonal loading for robust adaptive beamforming[C]. 2017 International Applied Computational Electromagnetic Society Symposium, Suzhou, China, 2017: 1–2. LI Jian, STOICA P, and WANG Zhisong. On robust Capon beamforming and diagonal loading[J]. IEEE Transactions on Signal Processing, 2003, 51(7): 1702–1715 doi: 10.1109/TSP.2003.812831 邹翔, 张旻, 钟子发. 基于失配误差正交分解的稳健自适应波束形成[J]. 电子与信息学报, 2010, 32(10): 2320–2323 doi: 10.3724/SP.J.1146.2010.00049ZOU Xiang, ZHANG Min, and ZHONG Zifa. Robust adaptive beamforming based on mismatch errors orthogonal decomposition[J]. Journal of Electronics&Information Technology, 2010, 32(10): 2320–2323 doi: 10.3724/SP.J.1146.2010.00049 徐定杰, 贺瑞, 沈锋, 等. 一种新的稳健Capon波束形成算法[J]. 宇航学报, 2012, 33(10): 1492–1497 doi: 10.3873/j.issn.1000-1328.2012.10.019XU Dingjie, HE Rui, SHEN Feng, et al. A new algorithm for robust Capon beamforming[J]. Journal of Astronautics, 2012, 33(10): 1492–1497 doi: 10.3873/j.issn.1000-1328.2012.10.019 YU Hongbo, FENG Dazheng, and YAO Xiaokun. Robust adaptive beamforming against large DOA mismatch with linear phase and magnitude constraints for multiple-input-multiple-output radar[J]. IET Signal Processing, 2016, 10(9): 1062–1072 doi: 10.1049/ietspr.2015.0521 解虎, 冯大政, 袁明冬. 一种基于稀疏约束的稳健波束形成算法[J]. 电子学报, 2016, 44(9): 2276–2281 doi: 10.3969/jssn.0372-2112.2016.09.036XIE Hu, FENG Dazheng, and YUAN Mingdong. A robust beamforming method based on sparse constraint[J]. Acta Electronica Sinica, 2016, 44(9): 2276–2281 doi: 10.3969/jssn.0372-2112.2016.09.036 李文兴, 毛晓军, 翟助群. 一种导向矢量双层估计的稳健波束形成算法[J]. 哈尔滨工程大学学报, 2018, 39(3): 594–600 doi: 10.11990/jheu.201610102LI Wenxing, MAO Xiaojun, and ZHAI Zhuqun. Steering vector double estimation robust adaptive beamforming[J]. Journal of Harbin Engineering University, 2018, 39(3): 594–600 doi: 10.11990/jheu.201610102 王昊, 马启明. 修正主模抑制稳健自适应波束形成算法[J]. 电子与信息学报, 2017, 39(11): 2620–2626 doi: 10.11999/JEIT170236WANG Hao and MA Qiming. Modified dominant mode rejection robust adaptive beamforming algorithm[J]. Journal of Electronics&Information Technology, 2017, 39(11): 2620–2626 doi: 10.11999/JEIT170236 李立欣, 白童童, 张会生等. 改进的双约束稳健Capon波束形成算法[J]. 电子与信息学报, 2016, 38(8): 2014–2019 doi: 10.11999/JEIT151213LI Lixin, BAI Tongtong, ZHANG Huisheng, et al. Improved double constraint robust Capon beamforming algorithm[J]. Journal of Electronics&Information Technology, 2016, 38(8): 2014–2019 doi: 10.11999/JEIT151213 GU Yujie and LESHEM A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation[J]. IEEE Transactions on Signal Processing, 2012, 60(7): 3881–3885 doi: 10.1109/TSP.2012.2194289 LUO Qian, XIE Julan, LI Huiyong, et al. Robust adaptive beamforming in the presence of strong desired signal and DOA mismatch[C]. IEEE 4th International Conference on Computation Problem Solving, Jiuzhai Valley, China, 2013: 1–4. 范展, 梁国龙, 王逸林. 一种零陷展宽鲁棒自适应波束形成算法[J]. 电子与信息学报, 2013, 35(11): 2764–2770 doi: 10.3724/SP.J.1146.2013.00087FAN Zhan, LIANG Guolong, and WANG Yilin. Robust adaptive beamforming with null widening[J]. Journal of Electronics&Information Technology, 2013, 35(11): 2764–2770 doi: 10.3724/SP.J.1146.2013.00087 HUANG Lei, ZHANG Jing, XU Xu, et al. Robust adaptive beamforming with a novel interference plus noise covariance matrix reconstruction Method[J]. IEEE Transactions on Signal Processing, 2015, 63(7): 1643–1650 doi: 10.1109/TSP.2015.2396002 HUANG Huiping, LIAO Bin, GUO Chongtao, et al. An improved approach to robust Capon beamforming with enhanced perfor-mance[C]. 2016 CIE International Conference on Radar, Guangzhou, China, 2016: 1–5. WANG Yasen, BAO Qinglong, and CHEN Zengping. Robust adaptive beamforming using IAA-based interference-plus-noise covariance matrix reconstruction[J]. Electronics Letters, 2016, 52(13): 1185–1186 doi: 10.1049/el.2015.4420 YUAN Xiaolei and Gan Lu. Robust adaptive beamforming via a novel subspace method for interference covariance matrix reconstruction[J]. Signal Processing, 2017, 130: 233–242 doi: 10.1016/j.sigpro.2016.07.008 LI Hui, ZHAO Yongbo, and CHENG Zengfei, et al. Robust adaptive beamforming based on sparse representation technique[J]. IET Radar,Sonar&Navigation, 2017, 11(9): 1417–1424 doi: 10.1049/iet-rsn.2016.0621 WEN Jun, ZHOU Xiang, ZHANG Wei, et al. Robust adaptive beamforming against significant angle mismatch[C]. IEEE Radar Conference, Seattle, USA, 2017: 713–716. -

 下载:
下载:


图(4)
计量
- 文章访问数: 2976
- HTML全文浏览量: 949
- PDF下载量: 100
- 被引次数: 0
 下载:
下载:
