

Threat Assessment Based Sensor Control for Multi-target Tracking
-
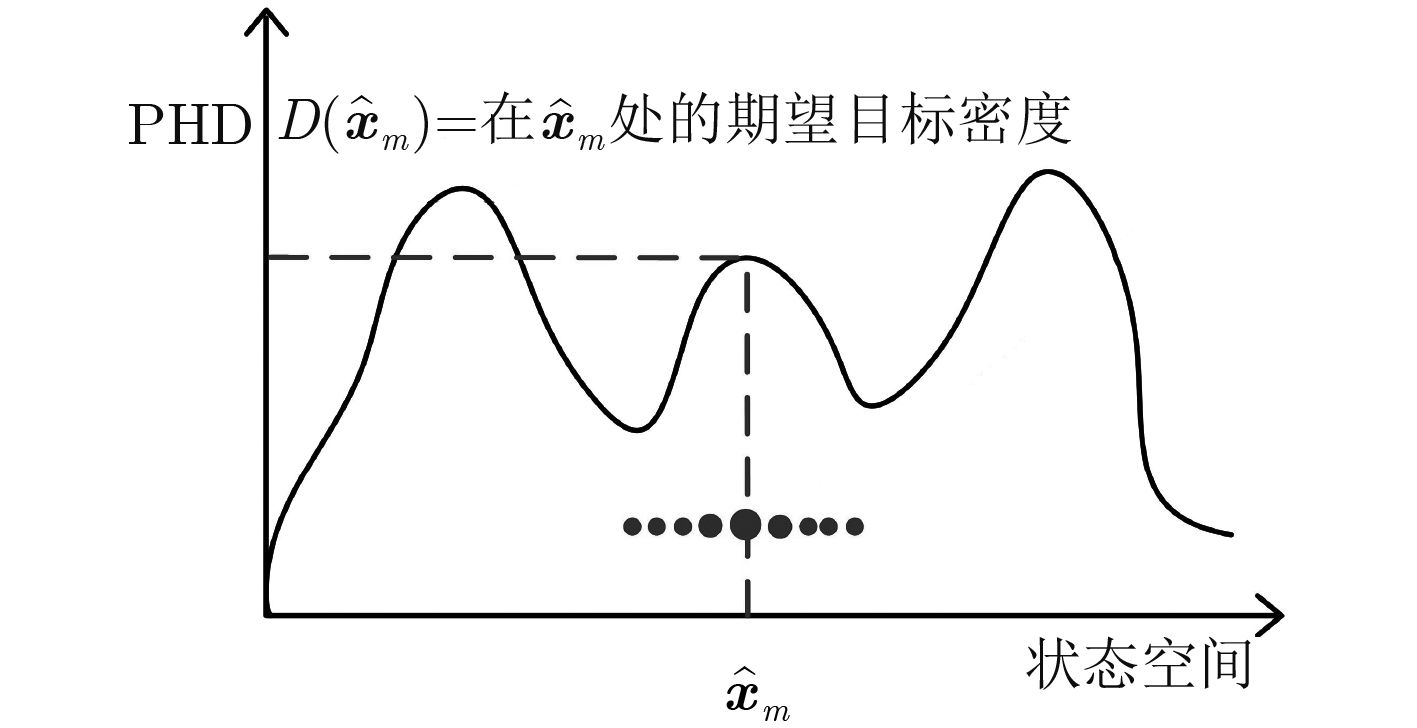
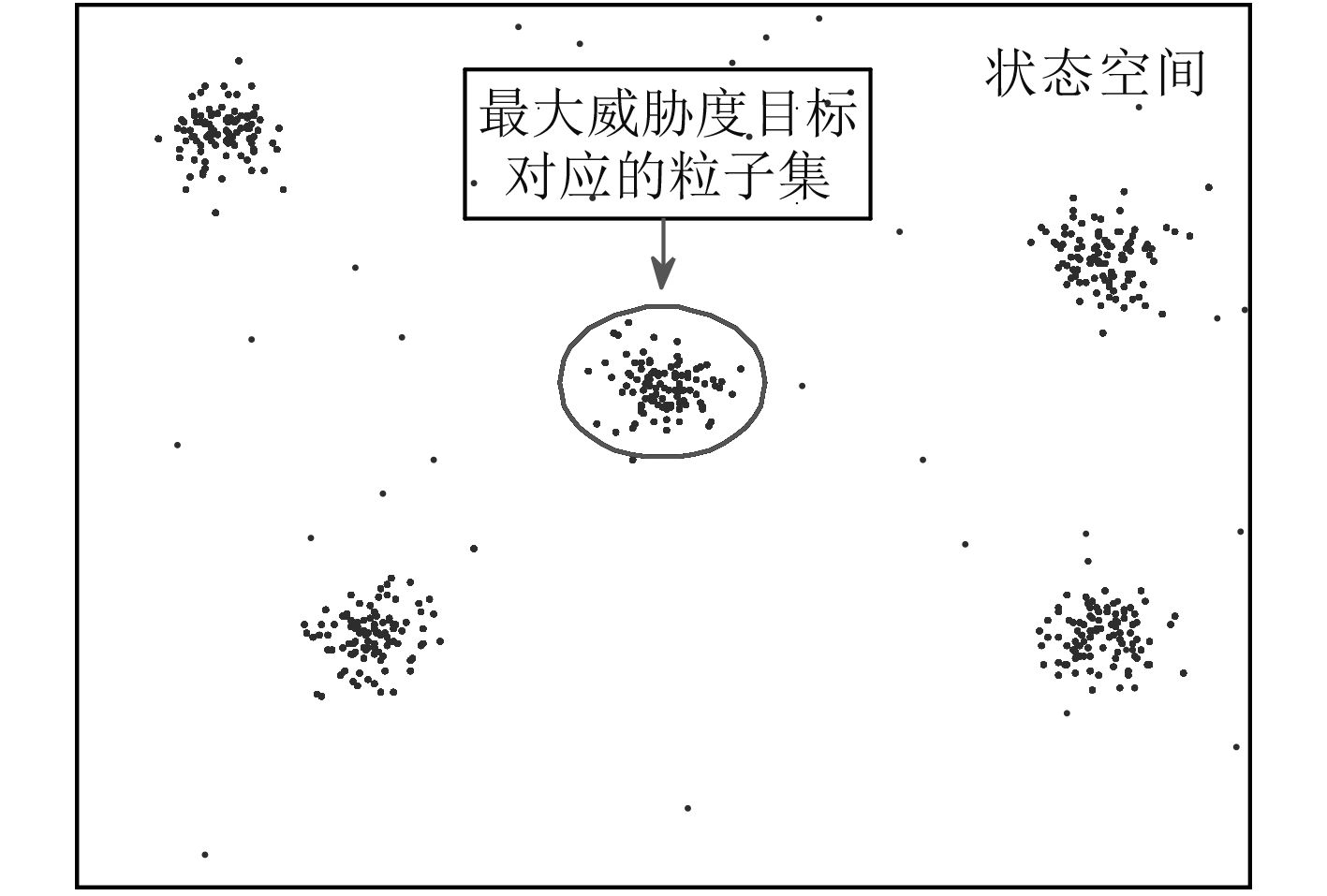
摘要: 该文基于随机有限集的多目标滤波器提出一种基于目标威胁度评估的传感器控制策略。首先,在部分可观测马尔科夫决策过程(POMDP)的理论框架下,给出基于信息论的传感器控制一般方法。其次,结合目标运动态势对影响目标威胁度的因素进行分析。然后,基于粒子多目标滤波器估计多目标状态,依据多目标运动态势的评估研究建立多目标威胁水平,并从多目标分布特性中深入分析并提取出当前时刻最大威胁度目标的分布特性。最后,利用Rényi散度作为传感器控制的评价指标,以最大威胁度目标的信息增益最大化为准则进行最终控制方案的求解。仿真实验验证了该方法的实用性和有效性。
-
关键词:
- 多目标跟踪 /
- 目标威胁度 /
- 战术重要性标绘 /
- 传感器控制 /
- 部分可观测马尔科夫决策过程
Abstract: This paper proposes a threat assessment based sensor control by using multi-target filter with random finite set. First, the general sensor control approach based on information theory is presented in the framework of Partially Observable Markov Decision Process (POMDP). Meanwhile, combined with target movement situation, the factors that affect the target threat degree are analyzed. Then, the multi-target state is estimated based on the particle multi-target filter, the multi-target threat level is established according to the multi-target motion situation, and the maximum threat target distribution characteristic is analyzed and extracted from the multi-target distribution characteristic. Finally, the Rényi divergence is used as the evaluation index in sensor control, and the final control policy is solved with the maximum information gain as the criterion. The simulation results verify the feasibility and effectiveness of the proposed method. -
MAHLER R P S. Advances in Statistical Multisource-Multitarget Information Fusion[M]. Norwood, MA: Artech House, 2014: 825–860. GOSTAR A K, HOSEINNEZHAD R, RATHNAYAKE T, et al. Constrained sensor control for labeled multi-Bernoulli filter using Cauchy-Schwarz divergence[J]. IEEE Signal Processing Letters, 2017, 24(9): 1313–1317 doi: 10.1109/LSP.2017.2723924 CHANGWEN Q and YOU H. A method of threat assessment using multiple attribute decision making[C]. The 6th IEEE International Conference on Signal Processing, Beijing, China, 2002: 1091–1095. doi: 10.1109/ICOSP.2002.1179979. MAHLER R P S. Statistical Multisource-Multitarget Information Fusion[M]. Norwood, MA: Artech House, 2007: 655–667. 陈辉, 韩崇昭. 机动多目标跟踪中的传感器控制策略的研究[J]. 自动化学报, 2016, 42(4): 512–523 doi: 10.16383/j.aas.2016.c150529CHEN Hui and HAN Chongzhao. Sensor control strategy for maneuvering multi-target tracking[J]. Acta Automatica Sinica, 2016, 42(4): 512–523 doi: 10.16383/j.aas.2016.c150529 HOANG H G and VO B T. Sensor management for multi-target tracking via multi-Bernoulli filtering[J]. Automatica, 2014, 50(4): 1135–1142 doi: 10.1016/j.automatica.2014.02.007 RISTIC B and ARULAMPALAM S. Bernoulli particle filter with observer control for bearings-only tracking in clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(3): 2405–2415 doi: 10.1109/TAES.2012.6237599 RISTIC B, VO B N, and CLARK D. A note on the reward function for PHD filters with sensor control[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 1521–1529 doi: 10.1109/TAES.2011.5751278 RISTIC B and VO B T. Sensor control for multi-object state space estimation using random finite sets[J]. Automatica, 2010, 46(11): 1812–1818 doi: 10.1016/j.automatica.2010.06.045 陈辉, 贺忠良, 刘备. 多目标跟踪中基于信息熵测度的传感器控制方法[J]. 控制与决策, 2018, 33(2): 337–344 doi: 10.13195/j.kzyjc.2016.1424CHEN Hui, HE Zhongliang, and LIU Bei. Sensor control method based on information entropy measure for multi-target tracking[J]. Control and Decision, 2018, 33(2): 337–344 doi: 10.13195/j.kzyjc.2016.1424 VO B N, SINGH S, and DOUCET A. Sequential Monte Carlo methods for multitarget filtering with random finite sets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224–1245 doi: 10.1109/TAES.2005.1561884 MAHLER R P S. Multitarget Sensor Management of Dispersed Mobile Sensors[M]. Singapore: World Scientific Publishing, 2004: 239–310. KATSILIERIS F, DRIESSEN H, and YAROVOY A. Threat-based sensor management for target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 2772–2785 doi: 10.1109/TAES.2015.140052 EL-FALLAH A, ZATEZALO A, MAHLER R P S, et al. Unified Bayesian situation assessment sensor management[C]. Proceedings of SPIE Signal Processing, Sensor Fusion, and Target Recognition, Orlando, USA, 2005: 253–264. doi: 10.1117/12.605435. EL-FALLAH A, ZATEZALO A, MAHLER R P S, et al. Advancements in situation assessment sensor management[C]. Defense and Security Symposium. International Society for Optics and Photonics, FL, USA, 2006: 62350M. doi: 10.1117/12.665933. SCHUHMACHER D, VO B T, and VO B N. A consistent metric for performance evaluation of multi-object filters[J].IEEE Transactions on Signal Processing, 2008, 56(8): 3447–3457 doi: 10.1109/TSP.2008.920469 -

 下载:
下载:


图(8)
计量
- 文章访问数: 2016
- HTML全文浏览量: 1050
- PDF下载量: 81
- 被引次数: 0
