

Micro-motion and Geometric Parameters Estimation of Wide-band Radar Cone-shaped Targets Based on Phase-derived Range
-
摘要: 针对传统方法基于宽带回波距离像包络信息提取微动分辨率较低这一问题,该文提出了一种结合宽带回波距离像包络信息和相位信息的微动特征参数化估计新方法。该方法通过对回波距离像包络分段并对各段进行Keystone变换实现距离方位解耦和,得到目标由于微动引起的各散射点相对参考点径向微距变化粗估计。利用粗估计结果提取回波相位信息,由相位测距原理可得到各散射点的精确微距曲线,进而完成进动目标运动及几何参数的估计。相比于只利用距离像包络信息提取微动的传统方法,所提算法可有效提升参数估计精度。仿真实验验证了其有效性和稳定性。Abstract: The traditional method used to extract micro-motion is based on the envelope information of the wideband echo range profile, the estimation accuracy of the traditional method is unsatisfactory. To deal with this problem, a new method for parameter estimation of micro-motion feature is proposed, which is implemented by combining envelope information and phase information of the wideband echo range profile. Firstly, the Keystone transform is performed to each segment obtained by segmenting the envelope of the echo range profile to estimate micro-motion coarsely. Then, the echo phase information is extracted according to the coarse estimation results. The accurate micro-motion curve of each scattering point can be obtained by the principle of phase-derived range. Finally, the estimation of the micro-motion and geometric parameters of the precession target is completed by utilizing the extracted micro-motion curve. Compared with the traditional method, the proposed algorithm can improve the precision of parameter estimation effectively. The effectiveness and stability of the proposed algorithm is verified by simulation experiments.
-
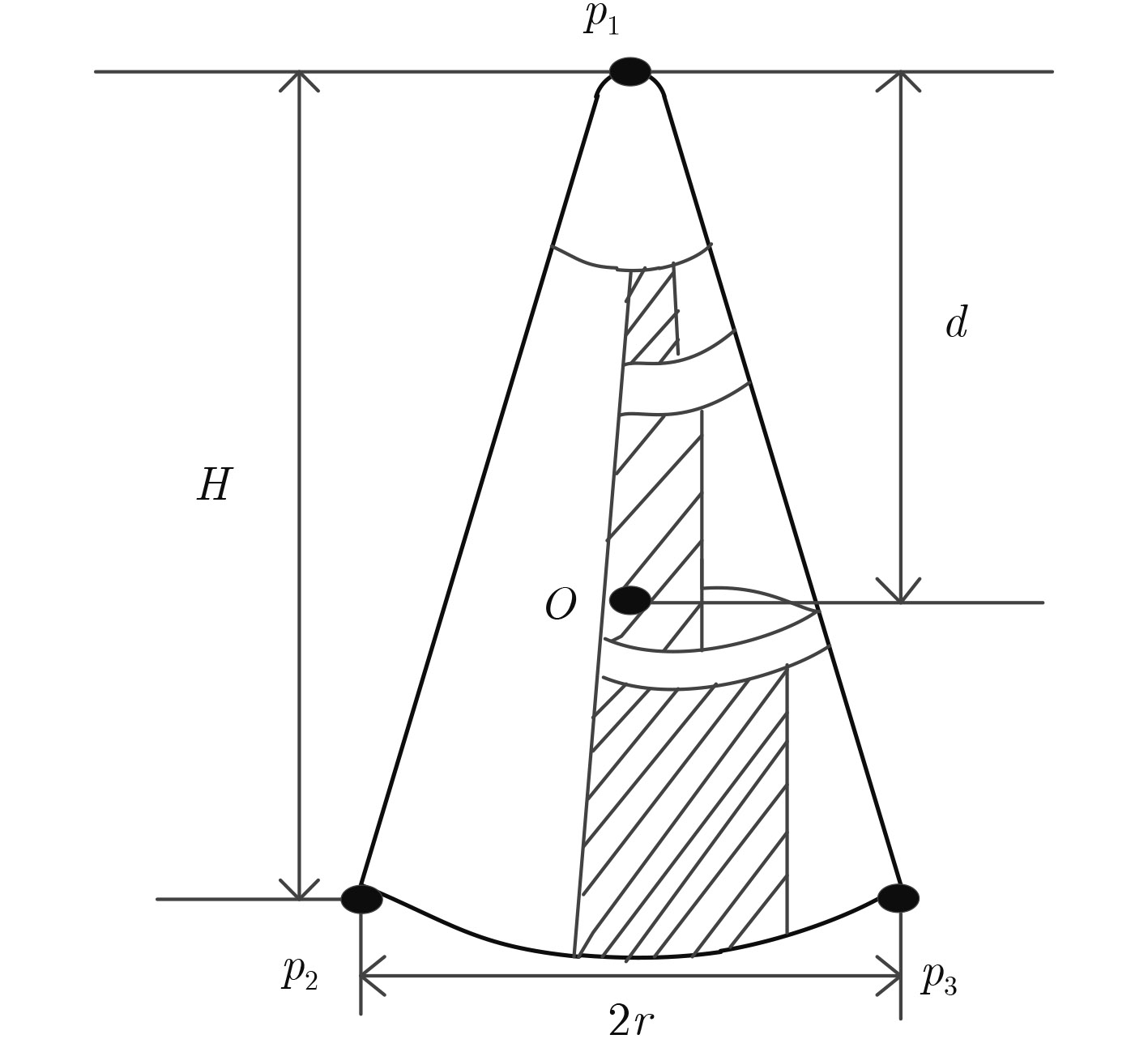
表 1 实验锥体目标参数
参数 数值 锥体高度 $H$ 0.96 m 质心到锥顶距离 $d$ 0.64 m 底面半径 $r$ 0.25 m 自旋频率 ${f_s}$ 2 Hz 锥旋频率 ${f_z}$ 3 Hz 摆动频率 ${f_v}$ 0 Hz 进动角 $\alpha $ ${10^ \circ }$  下载: 导出CSV
下载: 导出CSV
表 2 雷达系统的主要参数
参数 数值 载频 ${f_0}$ 10 GHz 带宽 $B$ 2 GHz 脉冲宽度 ${t_p}$ 10 μs 脉冲重复周期 ${\rm{prf}}$ 1 kHz 驻留时间 $T\,$ 1 s
下载: 导出CSV
表 4 目标参数估计结果
进动频率 ${f\!_c}$ $\left( {\rm Hz} \right)$ 进动角 $\theta $ $\left( {^ \circ } \right)$ 半锥角 $\eta $ $\left( {^ \circ } \right)$ 母线长度 $L$ $\left( {\rm m} \right)$ 锥体高度 $H$ $\left( {\rm m} \right)$ 底面半径 $r$ $\left( {\rm m} \right)$ 真实值 3 10.00 14.5980 0.9920 0.9600 0.2500 基于距离像包络参数估计 3 9.32 13.2000 1.0286 1.0014 0.2349 基于距离像相位参数估计 3 10.30 14.5000 1.0061 0.9740 0.2519
下载: 导出CSV
表 5 参数估计误差率(%)
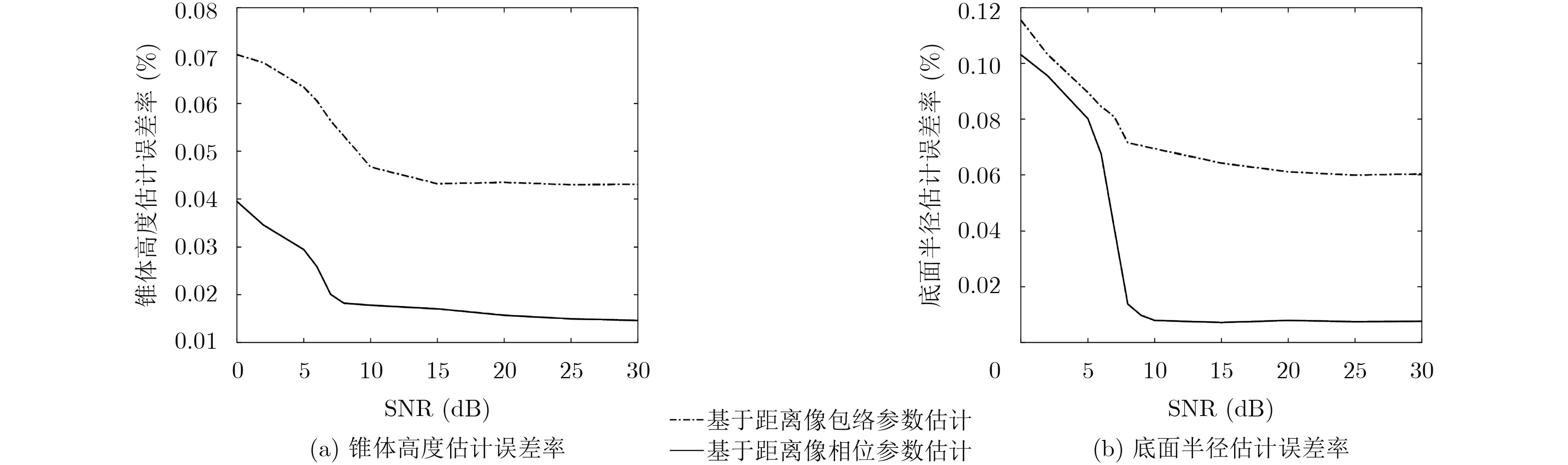
进动频率 ${f\!_c}$ 进动角 $\theta $ 半锥角 $\eta $ 母线长度 $L$ 锥体高度 $H$ 底面半径 $r$ 基于距离像包络参数估计误差率 0 6.80 9.58 3.69 4.31 6.04 基于距离像相位参数估计误差率 0 3.00 0.67 1.42 1.46 0.76
下载: 导出CSV
-
CHEN Victor C, LI Fayin, HO Shen-Shyang, et al. Micro-Doppler effect in radar: Phenomenon, model, and simulation study[J]. IEEE Transactions on Aerospace&Electronic Systems, 2006, 42(1): 2–21 doi: 10.1109/TAES.2006.1603402 杨鹏程, 吕晓德, 张丹, 等. 机载外辐射源雷达空时处理中距离徙动校正算法研究[J]. 电子与信息学报, 2016, 38(12): 3230–3237 doi: 10.11999/JEIT160954YANG Pengcheng, LÜ Xiaode, ZHANG Dan, et al. Research on range migration compensation algorithm in space time processing for airborne passive radar[J]. Journal of Electronics&Information Technology, 2016, 38(12): 3230–3237 doi: 10.11999/JEIT160954 姚汉英, 孙文峰, 马晓岩. 基于高分辨距离像序列的锥柱体目标进动和结构参数估计[J]. 电子与信息学报, 2013, 35(3): 537–544 doi: 10.3724/SP.J.1146.2012.00978YAO Hanying, SUN Wenfeng, and MA Xiaoyan. Precession and structure parameters estimation of cone-cylinder target based on the HRRPs[J]. Journal of Electronics&Information Technology, 2013, 35(3): 537–544 doi: 10.3724/SP.J.1146.2012.00978 艾小锋, 邹小海, 李永祯, 等. 基于时间-距离像分布的锥体目标进动与结构特征提取[J]. 电子与信息学报, 2011, 33(9): 2083–2088 doi: 10.3724/SP.J.1146.2011.00097AI Xiaofeng, ZOU Xiaohai, LI Yongzhen, et al. Feature extraction of precession and structure of cone-shaped object based on time-HRRP distribution[J]. Journal of Electronics&Information Technology, 2011, 33(9): 2083–2088 doi: 10.3724/SP.J.1146.2011.00097 CAMP W W, MAYHAN J T, and O DONNELL R M. Wideband radar for ballistic missile defense and range-Doppler imaging for satellites[J]. Lincoln Laboratory Journal, 2000, 12(2): 267–280. JAENISCH H. Discrimination via phased derived range[R]. USA: Missile Defense Agency Small Business Innovation Research Program, 2002. 朱得糠, 刘永祥, 李康乐, 等. 基于雷达相位测距的微动特征获取[J]. 宇航学报, 2013, 34(4): 574–582 doi: 10.873/j.issn.1000-1328.2013.04.018ZHU Dekang, LIU Yongxiang, LI Kangle, et al. Feature extraction for target with micro-motion based on radar phase derived range[J]. Journal of Astronautics, 2013, 34(4): 574–582 doi: 10.873/j.issn.1000-1328.2013.04.018 LIU Yongxiang, ZHU Dekang, LI Kangle, et al. Micromotion characteristic acquisition based on wideband radar phase[J].IEEE Transactions on Geoscience&Remote Sensing, 2014, 52(6): 3650–3657 doi: 10.1109/TGRS.2013.2274478 FAN Huayu, REN Lixiang, LONG Teng, et al. A high-precision phase-derived range and velocity measurement method based on synthetic wideband pulse Doppler radar[J]. Science China Information Sciences, 2017, 60(8): 082301 doi: 10.1007/s11432-016-0097-4 曹文杰, 张磊, 杜兰, 等. 基于瞬时频率估计的进动锥体目标微多普勒频率提取方法[J]. 电子与信息学报, 2015, 37(5): 1091–1096 doi: 10.11999/JEIT140985CAO Wenjie, ZHANG Lei, DU Lan, et al. Micro-Doppler frequency extraction for cone-shaped target with precession based on instantaneous frequency estimation[J]. Journal of Electronics&Information Technology, 2015, 37(5): 1091–1096 doi: 10.11999/JEIT140985 邵长宇. 基于HRRP序列的空间锥体目标微动参数估计方法研究[D]. [博士论文], 西安电子科技大学, 2016.SHAO Changyu. Research on micro-motion parameters estimation of space cone-shaped targets based on HRRP sequence[D]. [Ph.D. dissertation], Xidian University, 2016. 束长勇, 张生俊, 黄沛霖, 等. 基于微多普勒的空间锥体目标微动分类[J]. 北京航空航天大学学报, 2017, 43(7): 1387–1394 doi: 10.13700/j.bh.1001-5965.2016.0500SHU Changyong, ZHANG Shengjun, HUANG Peilin, et al. Micro-motion classification of spatial cone target based on micro-Doppler[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(7): 1387–1394 doi: 10.13700/j.bh.1001-5965.2016.0500 冯康, 时慧琨. 语音信号基音检测的现状及展望[J]. 微机发展, 2004, 14(3): 95–98 doi: 10.3969/j.issn.1673-629X.2004.03.032FENG Kang and SHI Huikun. The current situation and prospects of pitch detection[J]. Microcomputer Development, 2004, 14(3): 95–98 doi: 10.3969/j.issn.1673-629X.2004.03.032 曹文杰. 空间锥体目标微多普勒提取与参数估计[D]. [硕士论文], 西安电子科技大学, 2014.CAO Wenjie. Micro-Doppler extraction and parameter estimation of the space cone-shaped target[D]. [Master dissertation], Xidian University, 2014. 华煜明, 郭军海, 齐巍. 一种导弹目标宽带雷达相位测距的新方法[J]. 飞行器测控学报, 2016, 35(5): 344–350 doi: 10.7642/j.issn.1674-5620.2016-05-0344-07HUA Yuming, GUO Junhai, and QI Wei. A new method of wideband radar phase-derived ranging for ballistic targets[J]. Journal of Spacecraft TT&C Technology, 2016, 35(5): 344–350 doi: 10.7642/j.issn.1674-5620.2016-05-0344-07 黄澜心. 基于最小二乘的相位解缠理论与算法研究[D]. [硕士论文], 西南交通大学, 2012.HUANG Lanxin. Investigation on theory and algorithm of phase unwrapping based on least-squares[D]. [Master dissertation], Southwest Jiaotong University, 2012. 许邦建, 皇甫堪. 噪扰条件下相位测距中的解模糊问题[J]. 国防科技大学学报, 2001, 23(3): 73–76 doi: 10.3969/j.issn.1001-2486.2001.03.017XU Jianbang and HUANGFU Kan. Problem in the measurement of range by phases in noisy circumstance[J]. Journal of National University of Defence Technology, 2001, 23(3): 73–76 doi: 10.3969/j.issn.1001-2486.2001.03.017 -

 下载:
下载:


图(9) / 表(5)
计量
- 文章访问数: 2905
- HTML全文浏览量: 1200
- PDF下载量: 61
- 被引次数: 0
