

SL0 Reconstruction Algorithm for Compressive Sensing Based on BFGS Quasi Newton Method
-
摘要: 平滑l0范数(SL0)算法是一种基于近似l0范数的压缩感知信号重构算法,采用最速下降法和梯度投影原理,通过选择一个递减序列来逐步逼近最优解,具有匹配度高、计算量低、不需要已知信号稀疏度等优点。但是,其迭代方向为负梯度方向,使得在迭代过程中产生“锯齿现象”,导致在最优解附近收敛速度较慢。牛顿法具有较快的收敛速度,但是对初值的要求较高,并且需要计算Hesse矩阵。拟牛顿法则克服了这个缺点,利用BFGS公式计算Hesse矩阵的近似矩阵,只需要计算1阶导数信息。该文在SL0算法的基础上,结合BFGS拟牛顿法,提出一种改进的压缩感知信号重构算法。首先采用最速下降法迭代得到信号的某个估计值,然后将此估计值作为拟牛顿法的初值继续迭代,直至得到最优解。计算机仿真结果表明,在相同的条件下,该算法在重构精度、峰值信噪比和重建匹配度等方面均有较大提高。Abstract: Smoothed l0 norm (SL0) algorithm is a compressive sensing reconstruction algorithm based on approximate l0 norm, which uses the steepest descent method and gradient projection principle, by selecting a decreasing sequence to get the optimal solution. It has the advantages of high matching degree, low computational complexity and without knowing the signal sparsity. However, the iterative direction of steepest descent method is negative gradient direction, which leads to the " sawtooth phenomenon” and the slower convergence speed in the vicinity of the optimal solution. The Newton method has a good convergence speed but has higher requirement of the initial value and needs to calculate the Hessian matrix. The quasi Newton method overcomes this shortcoming and uses BFGS formula to calculate the approximate matrix of the Hessian matrix, it only needs the first derivative information. On the basis of SL0 algorithm and BFGS quasi Newton method, an improved reconstruction algorithm for Compressed Sensing (CS) signal is proposed. The steepest descent method is first used to get an estimated value, and then is taken as the initial value of quasi Newton method, using BFGS method to update the iterative direction until retaining the optimal solution. The simulation results show that the proposed algorithm has great improvement in reconstruction accuracy, peak signal to noise ratio and reconstruction matching degree.
-
Key words:
- Compressive Sensing (CS) /
- Reconstruction algorithm /
- Smoothed l0 norm /
- BFGS
-
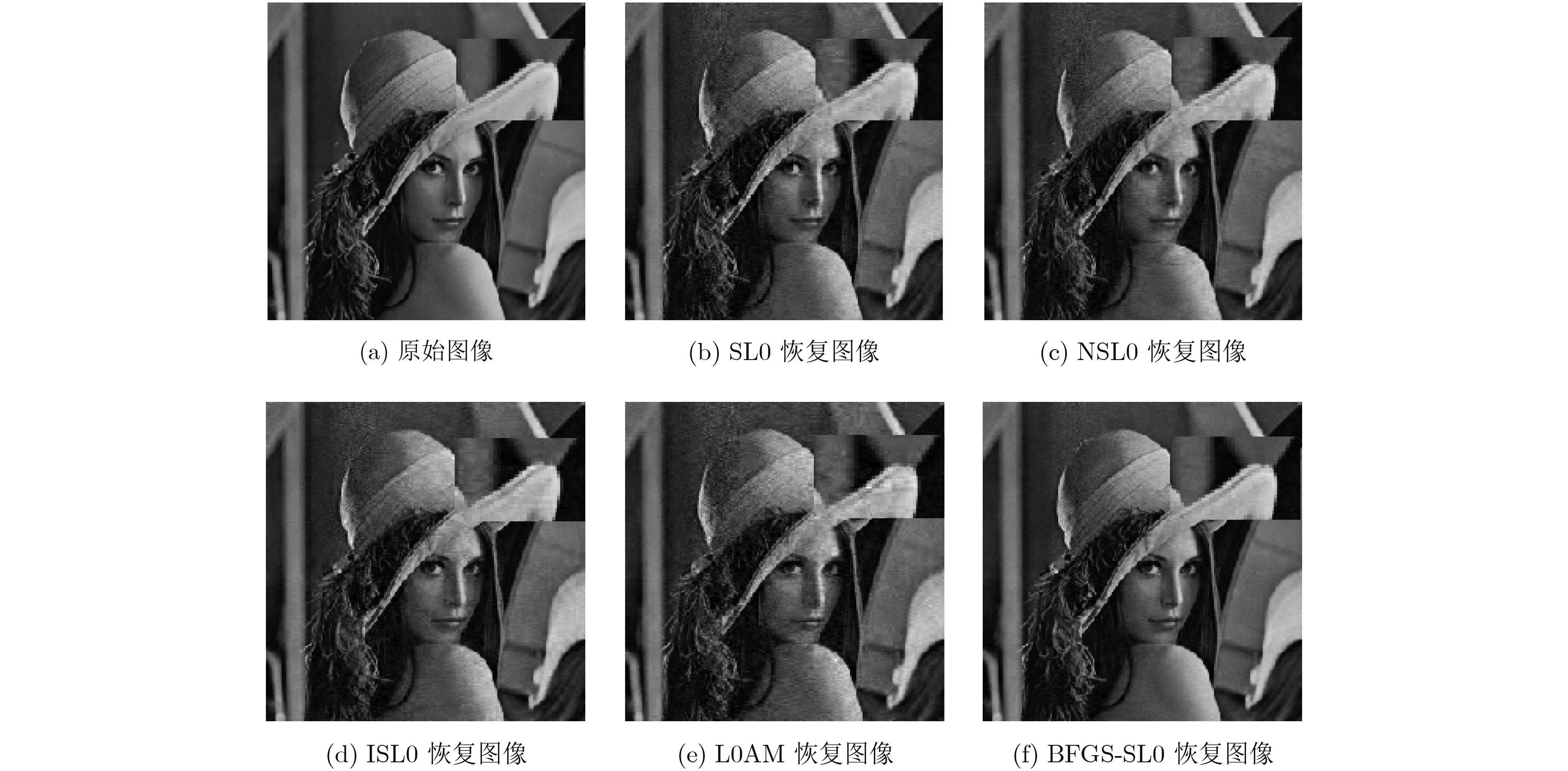
表 1 Lena图像重构参数对照表
算法 相对误差 峰值信噪比(dB) 重建匹配度 重构时间(s) SL0 0.070720 28.408407 0.988565 1.520847 NSL0 0.060162 29.754635 0.990416 1.162797 ISL0 0.062446 29.423168 0.989117 35.939030 L0AM 0.079117 27.436772 0.985986 78.190602 BFGS-SL0 0.051846 30.963193 0.991374 5.106042  下载: 导出CSV
下载: 导出CSV
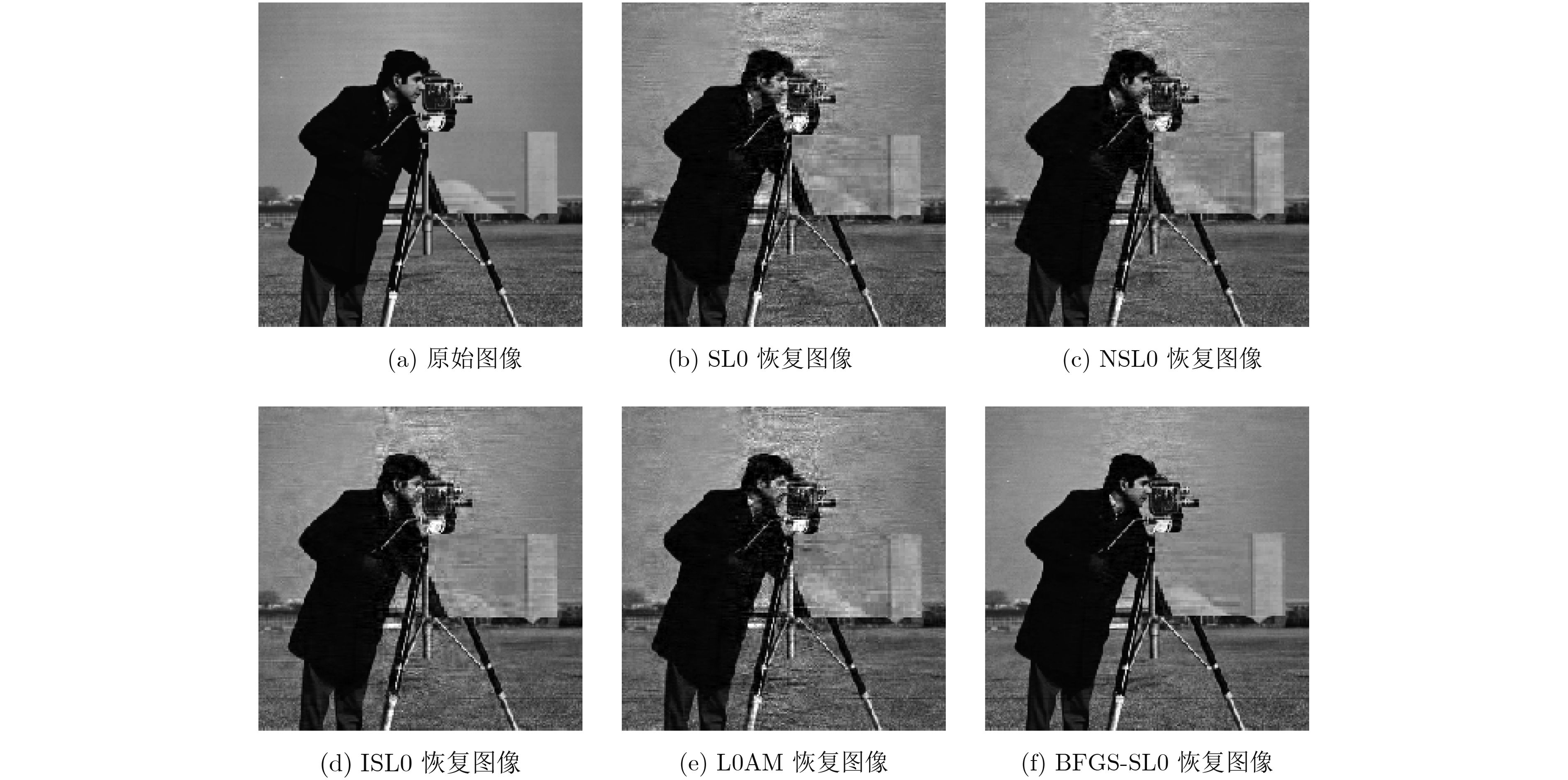
表 2 Cameraman图像重构参数对照表
算法 相对误差 峰值信噪比(dB) 重建匹配度 重构时间(s) SL0 0.074593 25.717452 0.980426 1.362892 NSL0 0.063440 27.123689 0.985850 1.018830 ISL0 0.069222 26.414663 0.983943 35.028154 L0AM 0.082170 25.002774 0.982677 68.704621 BFGS-SL0 0.053996 28.604430 0.990689 8.143261
下载: 导出CSV
-
CANDES E J, ROMBERG J, and TAO T. Robust uncertainty principles: exact signal reconstruction from highly incomplete frequency information[J]. IEEE Transactions on Information Theory, 2006, 52(2): 489–509 doi: 10.1109/TIT.2005.862083 DONOHO D L. Compressed sensing[J]. IEEE Transactions on Information Theory, 2006, 52(4): 1289–1306 doi: 10.1109/TIT.2006.871582 CANDES E J and TAO T. Near-optimal signal recovery from random projections: universal encoding strategies[J]. IEEE Transactions on Information Theory, 2006, 52(12): 5406–5425 doi: 10.1109/TIT.2006.885507 周燕, 曾凡智. 基于二维压缩感知和分层特征的图像检索算法[J]. 电子学报, 2016, 44(2): 453–460 doi: 10.3969/j.issn.0372-2112.2016.02.029ZHOU Yan and ZENG Fanzhi. An image retrieval algorithm based on two-dimensional compressive sensing and hierarchical feature[J]. Acta Electronica Sinica, 2016, 44(2): 453–460 doi: 10.3969/j.issn.0372-2112.2016.02.029 SHARMA S K, LAGUNAS E, CHATZINOTAS S, et al. Application of compressive sensing in cognitive radio communications: A survey[J]. IEEE Communications Surveys&Tutorials, 2016, 18(3): 1838–1860 doi: 10.1109/COMST.2016.2524443 程银波, 司菁菁, 候肖兰. 适用于无线传感器网络的层次化分布式压缩感知[J]. 电子与信息学报, 2017, 39(3): 539–545 doi: 10.11999/JEIT160439CHENG Yinbo, SI Jingjing, and HOU Xiaolan. Hierarchical distributed compressed sensing for wireless sensor network[J]. Journal of Electronics&Information Technology, 2017, 39(3): 539–545 doi: 10.11999/JEIT160439 李少东, 杨军, 陈文峰, 等. 基于压缩感知理论的雷达成像技术与应用研究进展[J]. 电子与信息学报, 2016, 38(2): 495–508 doi: 10.11999/JEIT150874LI Shaodong, YANG Jun, CHEN Wenfeng, et al. Overview of radar imaging technique and application based on compressive sensing theory[J]. Journal of Electronics&Information Technology, 2016, 38(2): 495–508 doi: 10.11999/JEIT150874 王峰, 向新, 易克初, 等. L0范数平滑逼近的稳健求解算法[J]. 电子与信息学报, 2015, 37(10): 2377–2382 doi: 10.11999/JEIT141590WANG Feng, XIANG Xin, YI Kechu, et al. Robust computational methods for smoothed L0 approximation[J]. Journal of Electronics&Information Technology, 2015, 37(10): 2377–2382 doi: 10.11999/JEIT141590 TAN Mingkui, TSANG I W, and WANG Li. Matching pursuit LASSO Part I: Sparse recovery over big dictionary[J]. IEEE Transactions on Signal Processing, 2015, 63(3): 727–741 doi: 10.1109/TSP.2014.2385036 TROPP J A and GILBERT A C. Signal recovery from random measurements via orthogonal matching pursuit[J]. IEEE Transactions on Information Theory, 2007, 53(12): 4655–4666 doi: 10.1109/TIT.2007.909108 田金鹏, 刘小娟, 郑国莘. 一种变步长稀疏度自适应子空间追踪算 法[J]. 自动化学报, 2016, 42(10): 1512–1519 doi: 10.16383/j.aas.2016.c150801TIAN Jinpeng, LIU Xiaojuan, and ZHENG Guoxin. A variable step size sparse adaptive subspace tracking algorithm[J]. Journal of Automation, 2016, 42(10): 1512–1519 doi: 10.16383/j.aas.2016.c150801 MODHA V and BUTANI R. Compressive sensing in speech from LPC using gradient projection for sparse reconstruction[J]. International Journal of Engineering Research&Applications, 2015, 5(2): 6–8. 董腾. 基于内点法压缩感知重构算法的研究[D]. [博士论文], 河北工业大学, 2014.DONG Teng. Research on compressed sensing algorithm based on interior point method[D]. [Ph.D. dissertation], Hebei University of Technology, 2014. MOHIMANI H, BABAIE-ZADEH M, and JUTTEN C. A fast approach for overcomplete sparse decomposition based on smoothed l0 norm[J]. IEEE Transactions on Signal Processing, 2009, 57(1): 289–301 doi: 10.1109/TSP.2008.2007606 林婉娟, 赵瑞珍, 李浩. 用于压缩感知信号重建的NSL0算法[J]. 新型工业化, 2011, 1(7): 78–84LIN Wanjuan, ZHAO Ruizhen, and LI Hao. The NSL0 algorithm for compressive sensing signal reconstruction[J]. New industrialization, 2011, 1(7): 78–84 杨良龙, 赵生妹, 郑宝玉, 等. 基于SL0压缩感知信号重建的改进算 法[J]. 信号处理, 2012, 28(6): 834–841YANG Lianglong, ZHAO Shengmei, ZHENG Baoyu, et al. The improved reconstruction algorithm for compressive sensing on SL0[J]. Signal Processing, 2012, 28(6): 834–841 王军华, 黄知涛, 周一宇. 稀疏信号重构的迭代平滑 l0范数最小化算 法[J]. 宇航学报, 2012, 33(5): 642–647 doi: 10.3873/j.issn.1000-1328.2012.05.017WANG Junhua, HUANG Zhitao, and ZHOU Yiyu. Sparse signal reconstruction based on iterative smoothed l0 norm minimization[J]. Journal of Astronautics, 2012, 33(5): 642–647 doi: 10.3873/j.issn.1000-1328.2012.05.017 YE X, ZHU W P, ZHANG A, et al. Sparse channel estimation of MIMO-OFDM systems with unconstrained smoothed l0-norm-regularized least squares compressed sensing[J]. EURASIP Journal on Wireless Communications&Networking, 2013, 2013(1): 282–294 doi: 10.1186/1687-1499-2013-282 MOHAMMADI M R, Fatemizadeh E, and MAHOOR M H. Non-negative sparse decomposition based on constrained smoothed l0 norm[J]. Signal Processing, 2014, 100: 42–50. 李颖, 王泽, 王军华, 等. 基于 l0范数近似最小化的稀疏信号重构方 法[J]. 计算机工程与应用, 2015, 51(10): 200–204 doi: 10.3778/j.issn.1002-8331.1309-0500LI Ying, WANG Ze, WANG Junhua, et al. Sparse signal reconstruction based on l0 norm approximation minimization[J]. Computer Engineering and Applications, 2015, 51(10): 200–204 doi: 10.3778/j.issn.1002-8331.1309-0500 高睿, 赵瑞珍, 胡绍海. 基于压缩感知的变步长自适应匹配追踪重建算法[J]. 光学学报, 2010, 30(6): 1639–1644GAO Rui, ZHAO Ruizhen, and HU Shaohai. Variable step size adaptive matching pursuit algorithm for image reconstruction based on compressive sensing[J]. Acta Optica Sinica, 2010, 30(6): 1639–1644 陈宝林. 最优化理论与算法[M]. 第2版, 北京: 清华大学出版社, 2005: 306–314.CHEN Baolin. Optimization Theory and Algorithm[M]. Second Edition, Beijing: Tsinghua University Press, 2005: 306–314. -

 下载:
下载:




图(5) / 表(2)
计量
- 文章访问数: 2461
- HTML全文浏览量: 1322
- PDF下载量: 275
- 被引次数: 0
