

Electromagnetic Channel Modeling Theory and Approaches for Holographic MIMO Wireless Communications
-
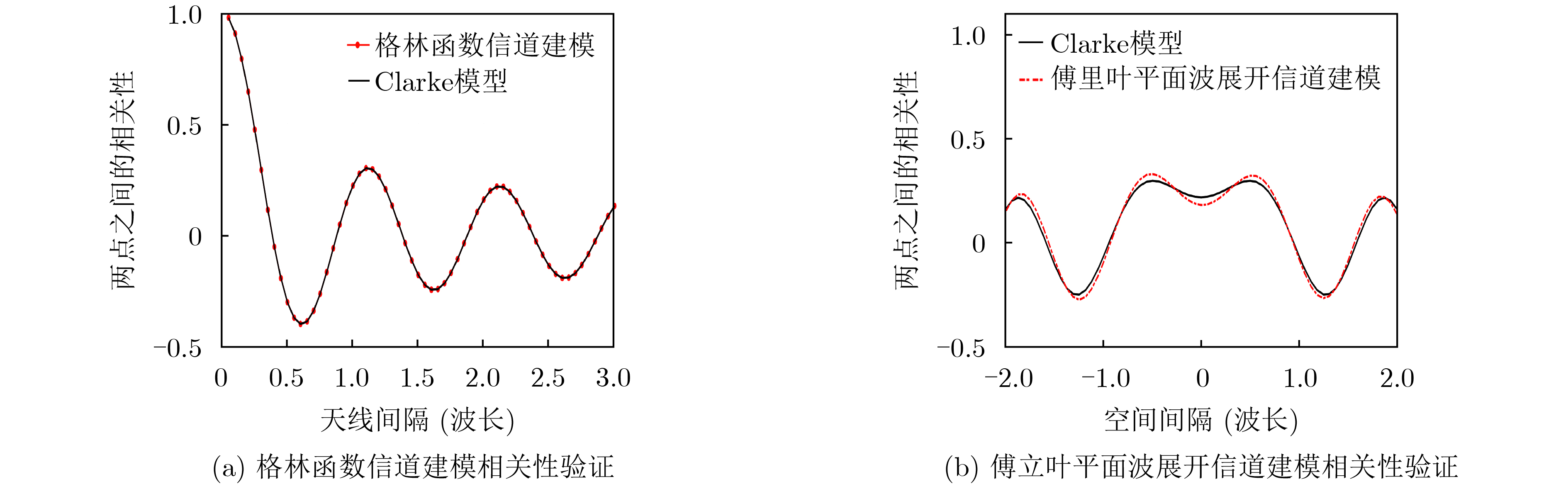
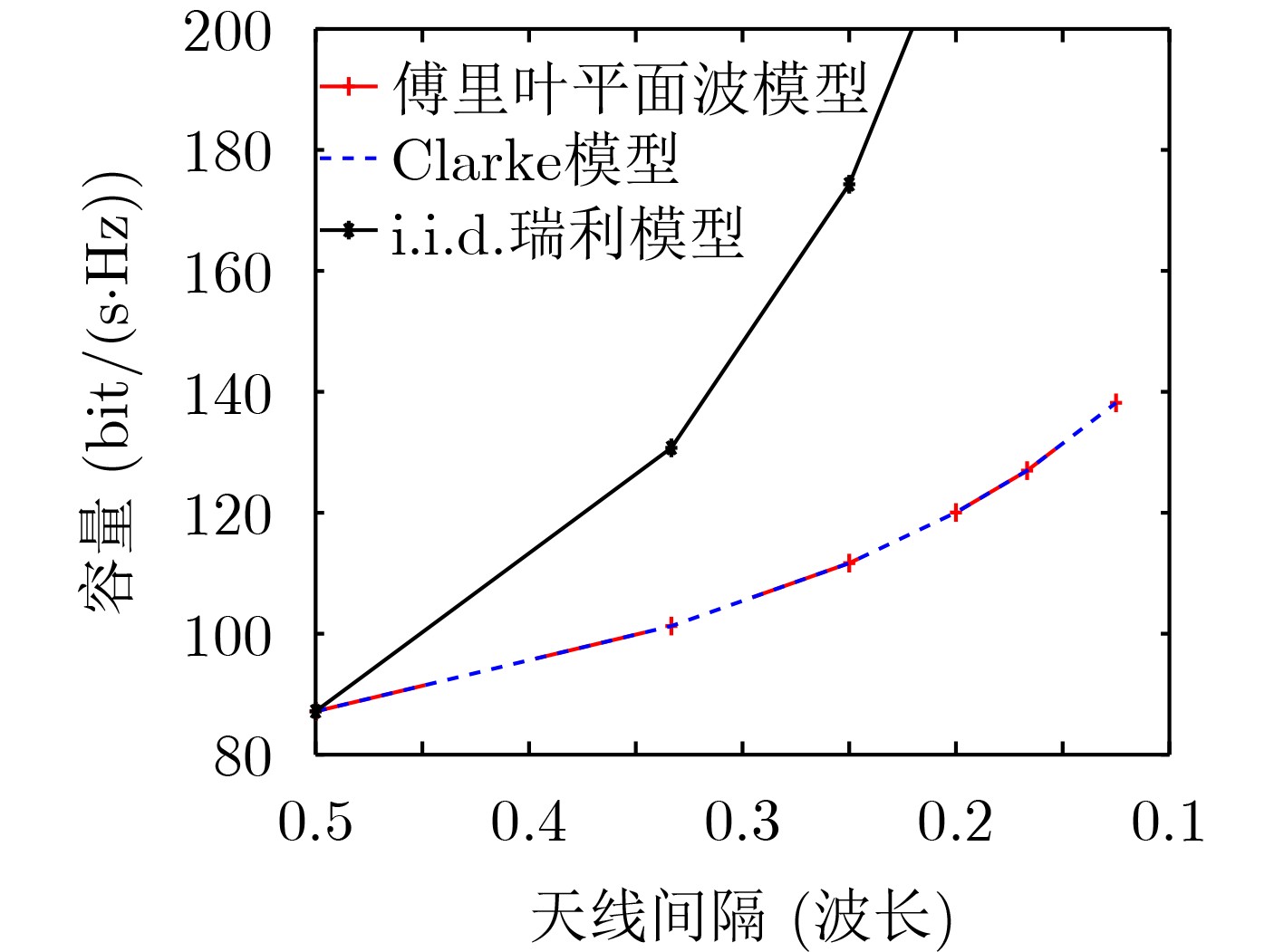
摘要: 全息多输入多输出(HMIMO)是6G通信中的新兴技术,相应阵列由固定物理孔径下的密布天线单元组成。全息MIMO是电磁约束下Massive MIMO天线技术的拓展。全息MIMO系统在有效提升无线通信性能方面具有极大的潜力。比如,可用最小的功率损耗实现尽可能大的连续孔径,灵活控制目标方向的电磁波传输等。但是,由于全息MIMO系统包含大量的紧密分布的天线单元,且单元之间的距离小于半波长,因而造成严重的电磁耦合作用。这些耦合使传统的独立同分布的信道假设失效。因此,如何设计一个有效且贴近实际的信道建模成为当前全息MIMO研究中最具挑战性的问题之一。针对该挑战,该文研究了基于电磁场理论的4种信道建模方式,它们都能很好描述全息MIMO系统中的电磁波传输特征。第1种是基于平面格林函数的精确信道建模方式,该方式将自由空间中点对点的格林函数扩展到平面之间积分形式的格林函数,通过积分计算来构造两个全息MIMO平面之间的通信信道,但该方法的复杂度较高。第2, 3种方法则分别采用了平面波展开和球面波展开来近似全息MIMO的通信信道,这两种方案的复杂度更低。其中,基于平面波展开的信道建模形式相对简单,更适用于远场,但是会低估单元强耦合时的最大系统容量;基于球面波展开的信道建模能更好捕捉电磁波信道几何特征,但其复杂度较高。最后介绍基于随机格林函数的信道建模方法,主要描述富散射环境或瑞利信道中电磁波的随机特性。Abstract: Holographic Multiple-Input Multiple-Output (HMIMO) is an emerging technology for 6G communications. This type of array is composed of densely distributed antenna elements within a fixed aperture area. It is an extension of Massive MIMO technology under the practical constraints of antenna aperture. HMIMO systems have great potential in significantly improving wireless communication performance. However, due to the presence of closely spaced antennas, and the distane between antennas is less than half of the length, severe coupling effects are inevitable and traditional assumption of independent and identically distributed channel is invalid. Thus, designing an effective and practical channel model becomes one of the most challenging problems in HMIMO researches. To address these challenges, this paper investigates four channel modeling approaches based on electromagnetic field theory. The first approach is based on the plane Green’s function and models the integral of Green’s functions between planes with high complexity. The second and third approaches approximate the communication channel in HMIMO using plane wave expansion and spherical wave expansion, respectively, with lower complexity. The channel modeling based on plane wave expansion is relatively simple and is more suitable for far field, but would underestimate the maximum capacity of the system under strong coupling between antennas. The channel modeling based on spherical wave expansion better captures the characteristics of the electromagnetic wave channel but comes with higher complexity. Finally, a channel modeling method based on random Green’s functions is introduced, primarily describing the random characteristics of electromagnetic waves in rich scattering environments or Rayleigh channels.
-
[1] HUANG Chongwen, HU Sha, ALEXANDROPOULOS G C, et al. Holographic MIMO surfaces for 6G wireless networks: Opportunities, challenges, and trends[J]. IEEE Wireless Communications, 2020, 27(5): 118–125. doi: 10.1109/MWC.001.1900534. [2] MARZETTA T L. Spatially-stationary propagating random field model for massive MIMO small-scale fading[C]. 2018 IEEE International Symposium on Information Theory, Vail, USA, 2018: 391–395. doi: 10.1109/ISIT.2018.8437634. [3] PIZZO A, SANGUINETTI L, and MARZETTA T L. Spatial characterization of electromagnetic random channels[J]. IEEE Open Journal of the Communications Society, 2022, 3: 847–866. doi: 10.1109/OJCOMS.2022.3171409. [4] HUANG Chongwen, ZAPPONE A, ALEXANDROPOULOS G C, et al. Reconfigurable intelligent surfaces for energy efficiency in wireless communication[J]. IEEE Transactions on Wireless Communications, 2019, 18(8): 4157–4170. doi: 10.1109/TWC.2019.2922609. [5] WEI Li, HUANG Chongwen, ALEXANDROPOULOS G C, et al. Channel estimation for RIS-empowered multi-user MISO wireless communications[J]. IEEE Transactions on Communications, 2021, 69(6): 4144–4157. doi: 10.1109/TCOMM.2021.3063236. [6] STRINATI E C, ALEXANDROPOULOS G C, WYMEERSCH H, et al. Reconfigurable, intelligent, and sustainable wireless environments for 6G smart connectivity[J]. IEEE Communications Magazine, 2021, 59(10): 99–105. doi: 10.1109/MCOM.001.2100070. [7] WEI Li, HUANG Chongwen, ALEXANDROPOULOS G C, et al. Multi-user holographic MIMO surfaces: Channel modeling and spectral efficiency analysis[J]. IEEE Journal of Selected Topics in Signal Processing, 2022, 16(5): 1112–1124. doi: 10.1109/JSTSP.2022.3176140. [8] WILLIAMS R J, DE CARVALHO E, and MARZETTA T L. A communication model for large intelligent surfaces[C]. 2020 IEEE International Conference on Communications Workshops, Dublin, Ireland, 2020: 1–6. doi: 10.1109/ICCWorkshops49005.2020.9145091. [9] BASHARAT S, HASSAN S A, PERVAIZ H, et al. Reconfigurable intelligent surfaces: Potentials, applications, and challenges for 6G wireless networks[J]. IEEE Wireless Communications, 2021, 28(6): 184–191. doi: 10.1109/MWC.011.2100016. [10] NIE Shuai and AKYILDIZ I F. Codebook design for dual-polarized ultra-massive MIMO communications at millimeter wave and terahertz bands[C]. 2021 IEEE International Conference on Acoustics, Speech and Signal Processing, Toronto, Canada, 2021: 8072–8076. doi: 10.1109/ICASSP39728.2021.9413660. [11] DE SENA A S, NARDELLI P H J, DA COSTA D B, et al. Dual-polarized IRSs in uplink MIMO-NOMA networks: An interference mitigation approach[J]. IEEE Wireless Communications Letters, 2021, 10(10): 2284–2288. doi: 10.1109/LWC.2021.3099867. [12] ZAFARI G, KOCA M, and SARI H. Dual-polarized spatial modulation over correlated fading channels[J]. IEEE Transactions on Communications, 2017, 65(3): 1336–1352. doi: 10.1109/TCOMM.2016.2643664. [13] HAN Yu, LI Xiao, TANG Wankai, et al. Dual-polarized RIS-assisted mobile communications[J]. IEEE Transactions on Wireless Communications, 2022, 21(1): 591–606. doi: 10.1109/TWC.2021.3098521. [14] FRANCESCHETTI M. Wave Theory of Information[M]. Cambridge, UK: Cambridge University Press, 2017. doi: 10.1017/9781139136334. [15] YUAN S S A, HE Zi, CHEN Xiaoming, et al. Electromagnetic effective degree of freedom of an MIMO system in free space[J]. IEEE Antennas and Wireless Propagation Letters, 2022, 21(3): 446–450. doi: 10.1109/LAWP.2021.3135018. [16] MIKKI S M and ANTAR Y M M. A theory of antenna electromagnetic near field — part II[J]. IEEE Transactions on Antennas and Propagation, 2011, 59(12): 4706–4724. doi: 10.1109/TAP.2011.2165500. [17] ARNOLDUS H F. Representation of the near-field, middle-field, and far-field electromagnetic green’s functions in reciprocal space[J]. Journal of the Optical Society of America B, 2001, 18(4): 547–555. doi: 10.1364/JOSAB.18.000547. [18] DE ROSNY J, LEROSEY G, and FINK M. Theory of electromagnetic time-reversal mirrors[J]. IEEE Transactions on Antennas and Propagation, 2010, 58(10): 3139–3149. doi: 10.1109/TAP.2010.2052567. [19] WEI Li, HUANG Chongwen, ALEXANDROPOULOS G C, et al. Tri-polarized holographic MIMO surface in near-field: Channel modeling and precoding design[EB/OL]. https://arxiv.org/abs/2211.03479, 2022. [20] OCHELTREE K B and FRIZZEL L A. Sound field calculation for rectangular sources[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 1989, 36(2): 242–248. doi: 10.1109/58.19157. [21] SETÄLÄ T, KAIVOLA M, and FRIBERG A T. Decomposition of the point-dipole field into homogeneous and evanescent parts[J]. Physical Review E, 1999, 59(1): 1200–1206. doi: 10.1103/PhysRevE.59.1200. [22] PIZZO A, SANGUINETTI L, and MARZETTA T L. Fourier plane-wave series expansion for holographic MIMO communications[J]. IEEE Transactions on Wireless Communications, 2022, 21(9): 6890–6905. doi: 10.1109/TWC.2022.3152965. [23] PIZZO A, MARZETTA T L, and SANGUINETTI L. Spatially-stationary model for holographic MIMO small-scale fading[J]. IEEE Journal on Selected Areas in Communications, 2020, 38(9): 1964–1979. doi: 10.1109/JSAC.2020.3000877. [24] JIANG J S and INGRAM M A. Spherical-wave model for short-range MIMO[J]. IEEE Transactions on Communications, 2005, 53(9): 1534–1541. doi: 10.1109/TCOMM.2005.852842. [25] DOVELOS K, ASSIMONIS S D, QUOC NGO H, et al. Intelligent reflecting surfaces at terahertz bands: Channel modeling and analysis[C]. 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, Canada, 2021: 1–6. doi: 10.1109/ICCWorkshops50388.2021.9473890. [26] BALANIS C A. Advanced Engineering Electromagnetics[M]. 2nd ed. Hoboken, USA: John Wiley & Sons, 2012. [27] LIN Shen, LUO Sangrui, MA Shukai, et al. Predicting statistical wave physics in complex enclosures: A stochastic dyadic green’s function approach[J]. IEEE Transactions on Electromagnetic Compatibility, 2023, 65(2): 436–453. doi: 10.1109/TEMC.2023.3234912. [28] STEIN J, STÖCKMANN H J, and STOFFREGEN U. Microwave studies of billiard green functions and propagators[J]. Physical Review Letters, 1995, 75(1): 53–56. doi: 10.1103/PhysRevLett.75.53. -

 下载:
下载:


图(7)
计量
- 文章访问数: 1866
- HTML全文浏览量: 806
- PDF下载量: 259
- 被引次数: 0
 下载:
下载:
