

Features Extraction and Correlation Analysis of Multi-Source Data for Maritime Targets
-
摘要: 随着对海上目标检测识别需求的不断提高,多源信息联合处理快速发展。针对多源特征融合的目标检测问题:该文提取了3类9种物理可解释特征,包括雷达特征(径向尺寸、峰值个数、位置分布熵、横向尺寸、相对平均幅度)、可见光图像特征(边缘点数、水平投影宽度)和红外图像特征(高温连通区域数、热纹理能量)。采用斯皮尔曼相关系数衡量非同源数据特征之间的相关性,并结合假设检验方法判别相关显著性,以揭示多源特征的内在联系。实验结果表明,在多源特征间,尺寸特征稳定性较强,相关性较高;结构特征受观测条件影响显著,相关性较低。雷达极化方式、舰船运动状态及船只类型均对雷达回波特征提取有重要影响。可见光图像在结构信息提取上具有优势,红外图像尺寸特征在复杂环境中更稳定。研究结果揭示了多源特征的互补性,为后续多源特征融合目标检测算法提供了理论支撑。Abstract:
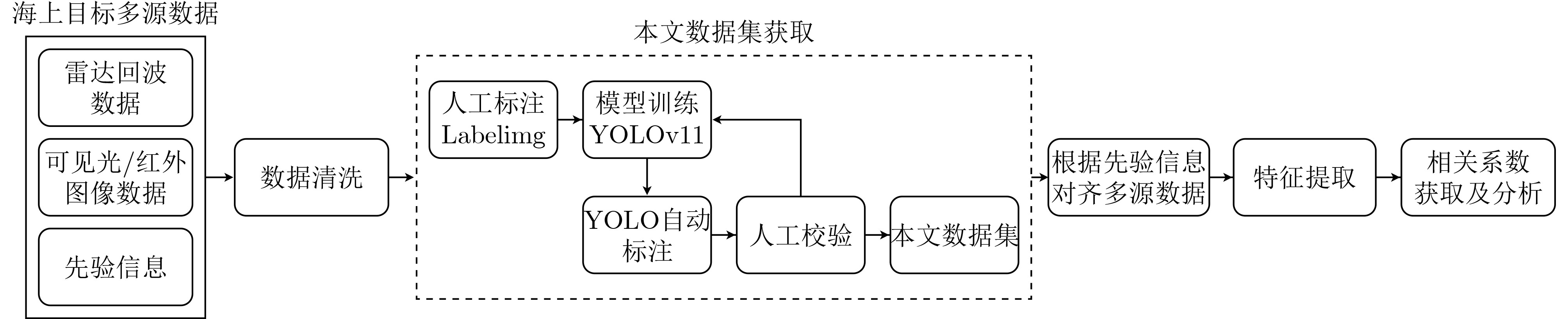
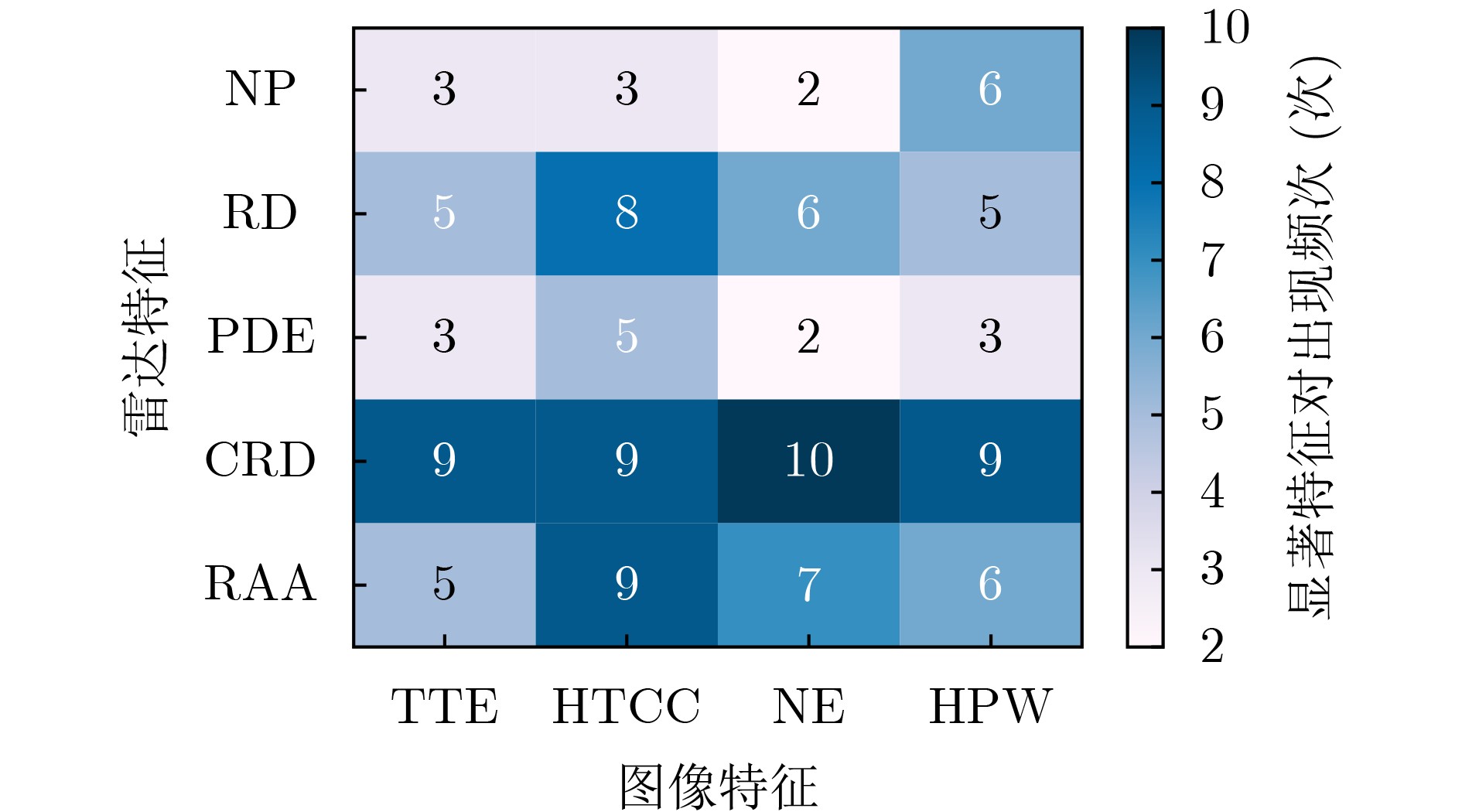
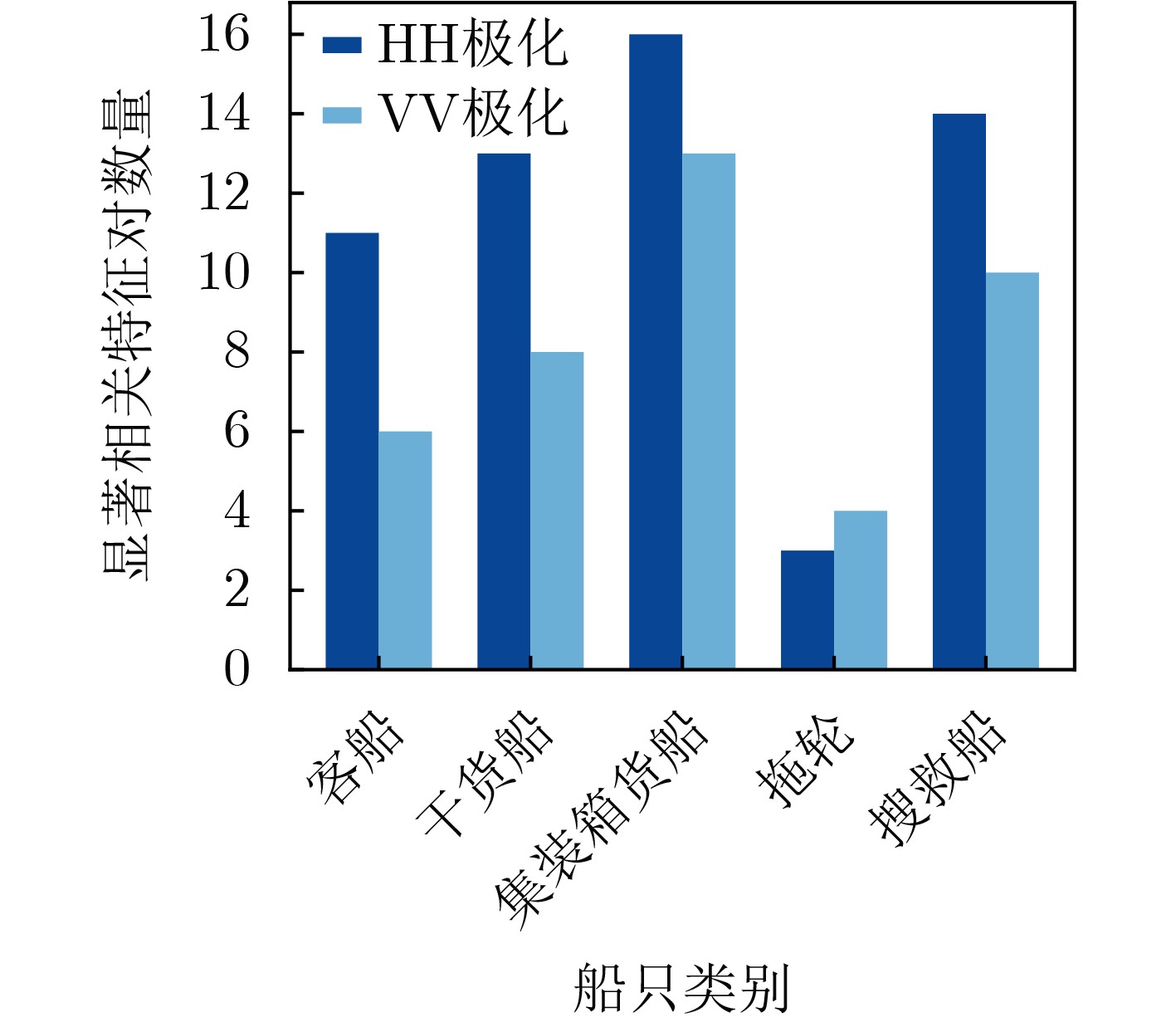
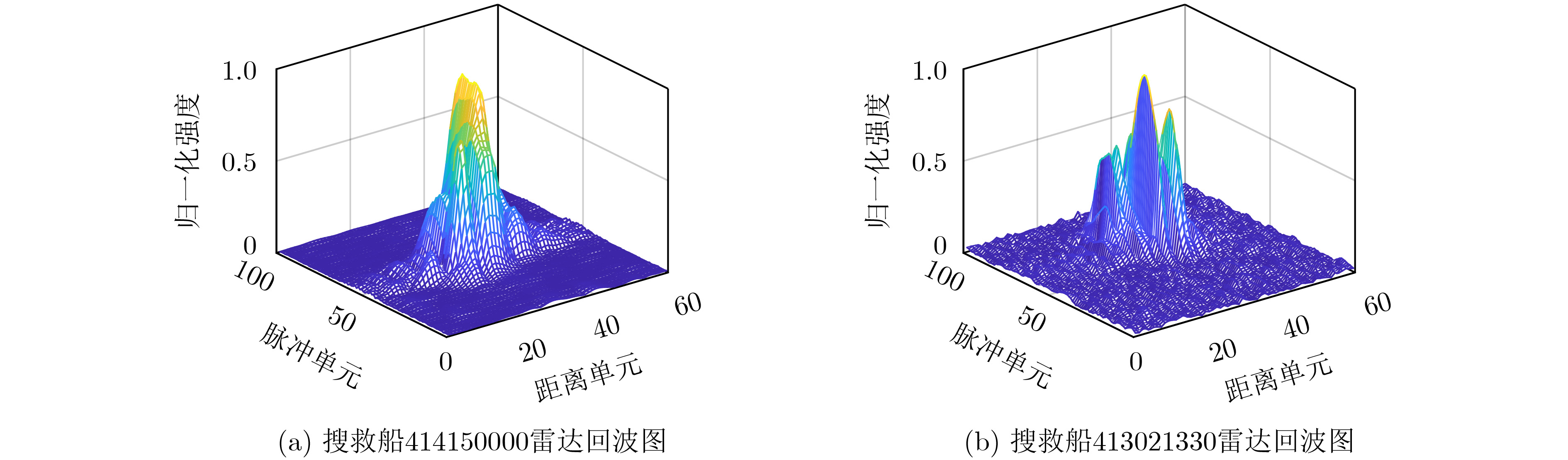
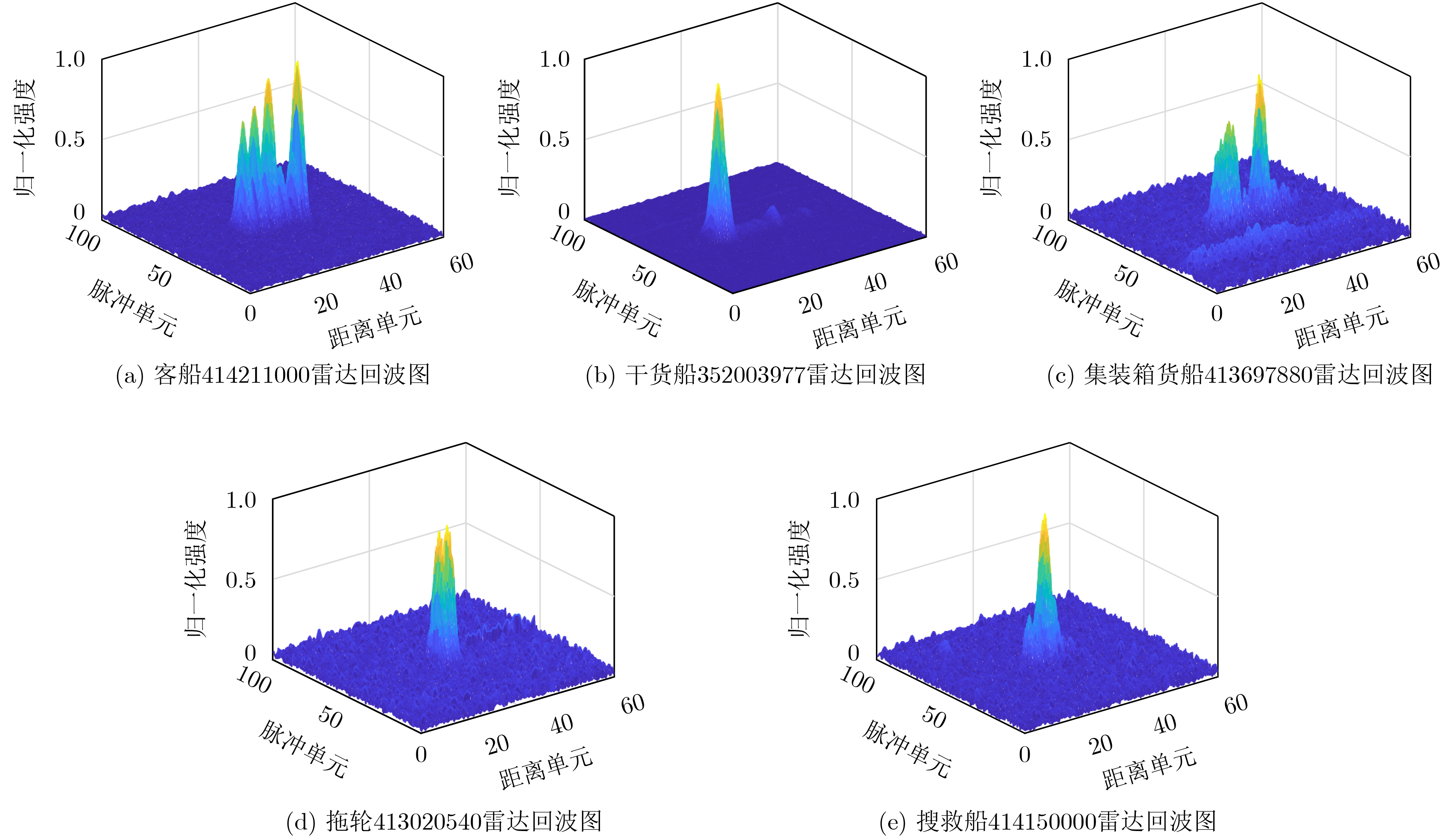
Objective The growing demand for maritime target detection and recognition has made multi-source information fusion a critical area of research. Different sensing modalities including radar, visible-light imaging, and infrared imaging offer complementary information that can improve detection and classification. However, the correlation among heterogeneous features extracted from these sources remains insufficiently understood. In addition, the effects of observational conditions on feature stability and discriminability needs further investigation. This study investigates the intrinsic relationships among multi-source features, evaluates their robustness under varying conditions, and provides theoretical support for effective multi-source feature fusion in maritime target detection. Methods Nine physically interpretable features are extracted across three categories: radar features (radial dimension, number of peaks, position distribution entropy, cross-range dimension, and relative average amplitude), visible image features (number of edges and horizontal projected width), and infrared image features (high-temperature connected component count and thermal texture energy). To ensure accurate feature extraction, data preprocessing consists of cleaning each compressed dataset. Radar data with excessively low signal-to-noise ratios and images with extensive occlusion are excluded. For dataset construction, radar echo data are visualized frame by frame, and a subset of radar, visible-light, and infrared images is manually annotated using LabelImg. Targets are classified into five types: passenger ships, dry cargo ships, container ships, tugboats, and search-and-rescue vessels. Based on these annotations, deep learning models are independently trained for each modality to automate annotation, and the results are manually validated to ensure quality. A standardized target dataset is then constructed by integrating the manually and automatically labeled data. Radar echo data are temporally aligned with visible-light and infrared images using prior time synchronization information. Features are extracted from each modality, and inter-feature correlations are analyzed. Spearman correlation coefficients are used to quantify relationships, and hypothesis testing is conducted to assess significance, revealing intrinsic associations among multi-source features. Results and Discussions Comparative analysis indicates that the correlation between radar echo and image features is strongly affected by feature attributes. Size-related features show stronger correlations, reflecting greater stability for multi-source data fusion, whereas structural features are more sensitive to observation conditions and exhibit weaker correlations. External factors including target motion state, ship type, and radar polarization mode also influence feature extraction and intermodal correlation. When targets are anchored, posture remains stable and motion blur is reduced, strengthening the correlation between radar structural features and image features. Larger vessels, such as container ships and passenger ships, benefit from multiple scattering centers and larger physical dimensions, which enhance feature extraction and intermodal correlation. In contrast, smaller vessels, such as tugboats and search-and-rescue boats, exhibit irregular structures and weaker radar backscatter, leading to lower correlations. The HH polarization mode, being less sensitive to background clutter, improves radar feature stability across various target types and enhances alignment with image features. Image feature stability also varies by modality: visible-light imaging is effective for extracting structural features, such as contours and edges, but is sensitive to illumination and occlusion; infrared imaging offers more stable size-related features and performs robustly in complex and low-visibility environments. These results highlight the complementary properties of multi-source features and establish a theoretical basis for their integration, supporting improved maritime target detection and classification. Conclusions This study demonstrates the complementary characteristics of multi-source features and their potential to improve maritime target detection and recognition. By analyzing feature correlations and stability across varying observational conditions, the results provide a theoretical foundation for refining multi-source fusion strategies. These insights support the development of more robust and reliable detection algorithms, contributing to enhanced situational awareness in maritime surveillance and defense. -
Key words:
- Marine target feature /
- Multi-source observation /
- Target feature /
- Correlation analysis
-
表 1 数据名称及船只参数
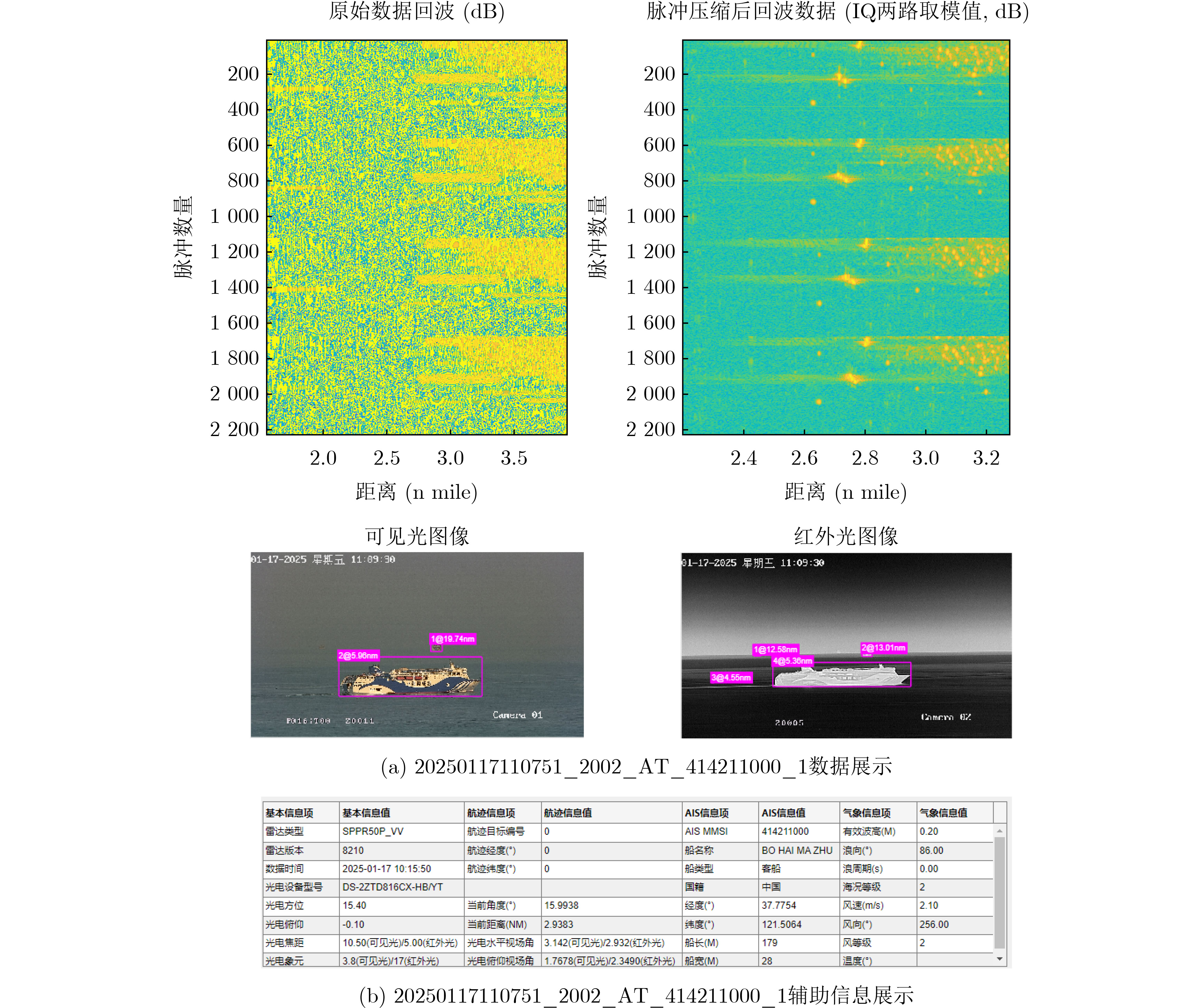
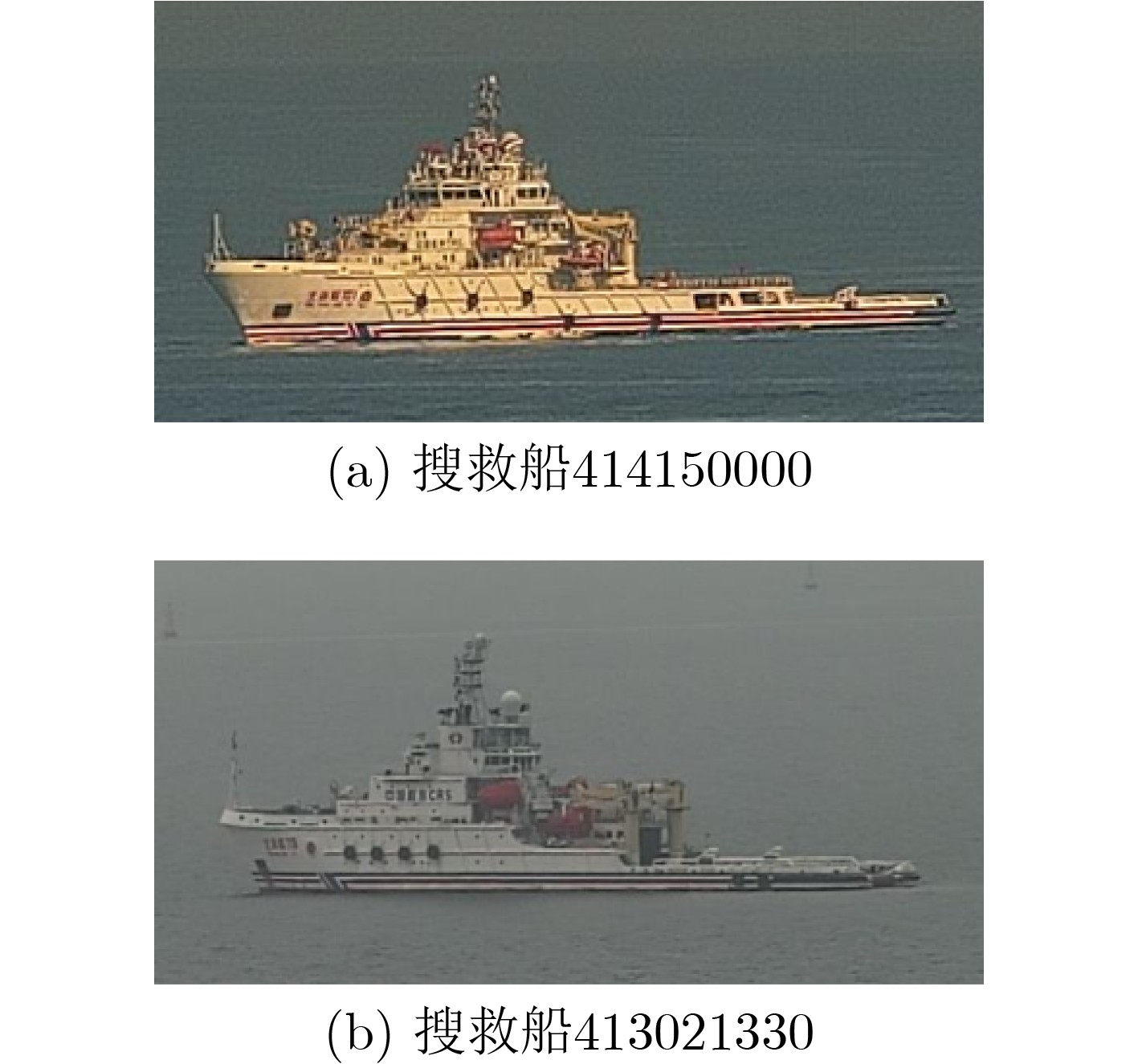
船只类型 数据压缩包名称 船只状态 船只尺寸 客船 20250117110753 _2003_AT_414211000 _120250117110751 _2002_AT_414211000 _1在航 180 m/28 m 干货船 20250117101738 _2003_AT_352003977 _120250117101739 _2002_AT_352003977 _1在航 289 m/45 m 集装箱货船 20250117103453 _2003_AT_413697880 _120250117103454 _2002_AT_413697880 _1在航 161 m/23 m 拖轮 20250117103143 _2003_AT_413020540 _120250117103141 _2002_AT_413020540 _1在航 39 m/11 m 搜救船 20250124121319 _2003_AT_414150000 _120250124121318 _2002_AT_414150000 _1在航 117 m/16 m 搜救船 20240930153712 _2002_ST_413021330 _1锚泊 100 m/15 m  下载: 导出CSV
下载: 导出CSV
表 2 客船相关系数表
热纹理能量TTE 高温连通区域数HTCC 边缘点数NE 水平投影宽度HPW 414211000_HH 峰值个数NP –0.063 0.034 –0.002 0.030 径向尺寸RD 0.002 0.245 –0.179 –0.242 位置分布熵PDE –0.088 0.067 0.008 0.043 横向尺寸CRD –0.279 –0.792 –0.284 –0.335 相对平均幅度RAA 0.285 0.546 0.235 0.316 414211000_VV 峰值个数NP 0.101 0.039 –0.086 –0.042 径向尺寸RD 0.098 0.128 –0.051 0.013 位置分布熵PDE 0.093 0.062 –0.073 –0.042 横向尺寸CRD –0.133 –0.803 –0.354 –0.237 相对平均幅度RAA –0.197 –0.499 –0.176 –0.143
下载: 导出CSV
表 3 干货船相关系数表
热纹理能量TTE 高温连通区域数HTCC 边缘点数NE 水平投影宽度HPW 352003977 _HH峰值个数NP 0.177 –0.251 –0.252 –0.281 径向尺寸RD 0.276 –0.295 –0.134 –0.269 位置分布熵PDE 0.220 –0.270 –0.244 –0.297 横向尺寸CRD 0.547 –0.609 –0.460 –0.525 相对平均幅度RAA –0.215 0.301 0.125 0.318 352003977 _VV峰值个数NP –0.011 –0.037 0.096 0.034 径向尺寸RD –0.223 0.346 0.187 0.232 位置分布熵PDE –0.098 0.038 0.124 0.062 横向尺寸CRD 0.562 –0.499 –0.462 –0.367 相对平均幅度RAA 0.262 –0.259 –0.264 –0.197
下载: 导出CSV
表 4 集装箱货船相关系数表
热纹理能量TTE 高温连通区域数HTCC 边缘点数NE 水平投影宽度HPW 413697880 _HH峰值个数NP –0.121 –0.309 –0.207 –0.325 径向尺寸RD –0.393 –0.638 –0.505 –0.550 位置分布熵PDE –0.089 –0.253 –0.161 –0.291 横向尺寸CRD –0.439 –0.612 0.555 0.608 相对平均幅度RAA 0.570 0.772 0.697 0.784 413697880 _VV峰值个数NP –0.313 –0.073 0.111 0.363 径向尺寸RD –0.522 –0.354 0.099 0.158 位置分布熵PDE –0.347 –0.076 0.148 0.322 横向尺寸CRD –0.534 –0.435 0.232 0.352 相对平均幅度RAA 0.409 0.349 –0.251 –0.276
下载: 导出CSV
表 5 拖轮相关系数表
热纹理能量TTE 高温连通区域数HTCC 边缘点数NE 水平投影宽度HPW 413020540_HH 峰值个数NP –0.151 0.231 0.222 –0.097 径向尺寸RD 0.077 0.029 0.602 0.154 位置分布熵PDE –0.149 0.324 0.101 0.008 横向尺寸CRD –0.181 0.116 –0.563 –0.160 相对平均幅度RAA 0.027 0.131 –0.067 0.201 413020540_VV 峰值个数NP –0.297 –0.248 –0.111 0.228 径向尺寸RD –0.163 –0.272 –0.032 0.185 位置分布熵PDE –0.378 –0.304 0.015 0.270 横向尺寸CRD 0.419 0.060 –0.079 –0.075 相对平均幅度RAA –0.019 0.228 –0.057 0.064
下载: 导出CSV
表 6 搜救船相关系数表
热纹理能量TTE 高温连通区域数HTCC 边缘点数NE 水平投影宽度HPW 414150000 _HH峰值个数NP –0.126 –0.352 –0.044 –0.363 径向尺寸RD –0.321 –0.432 –0.444 –0.256 位置分布熵PDE –0.154 –0.299 –0.171 –0.201 横向尺寸CRD 0.409 0.508 0.522 0.404 相对平均幅度RAA 0.125 –0.569 –0.276 –0.398 414150000 _VV峰值个数NP –0.132 –0.144 –0.210 –0.391 径向尺寸RD –0.278 –0.373 –0.349 –0.201 位置分布熵PDE –0.118 –0.151 –0.154 –0.121 横向尺寸CRD 0.457 0.402 0.398 0.438 相对平均幅度RAA –0.061 0.508 –0.033 –0.380
下载: 导出CSV
表 7 锚泊搜救船VV极化相关系数表
热纹理能量TTE 高温连通区域数HTCC 边缘点数NE 水平投影宽度HPW 413021330 _VV峰值个数NP –0.321 –0.134 –0.352 –0.363 径向尺寸RD –0.206 –0.306 –0.432 –0.344 位置分布熵PDE –0.307 –0.121 –0.213 –0.173 横向尺寸CRD 0.416 0.428 0.508 0.522 相对平均幅度RAA 0.117 0.409 0.307 0.341
下载: 导出CSV
-
[1] HU Jing, TUNG W W, and GAO Jianbo. Detection of low observable targets within sea clutter by structure function based multifractal analysis[J]. IEEE Transactions on Antennas and Propagation, 2006, 54(1): 136–143. doi: 10.1109/TAP.2005.861541. [2] 关键, 姜星宇, 刘宁波, 等. 海杂波中目标分数域谱范数特征检测方法[J]. 电子与信息学报, 2023, 45(6): 2162–2170. doi: 10.11999/JEIT220667.GUAN Jian, JIANG Xingyu, LIU Ningbo, et al. Spectral norm feature detection method in FRFT domain of targets in sea clutter[J]. Journal of Electronics & Information Technology, 2023, 45(6): 2162–2170. doi: 10.11999/JEIT220667. [3] 顾智敏, 张兴敢, 王琼. FRFT域内的海杂波多重分形特性与目标检测[J]. 南京大学学报: 自然科学, 2017, 53(4): 731–737. doi: 10.13232/j.cnki.jnju.2017.04.016.GU Zhimin, ZHANG Xinggan, and WANG Qiong. Multifractal property and target detection of sea clutter in FRFT domain[J]. Journal of Nanjing University: Natural Science, 2017, 53(4): 731–737. doi: 10.13232/j.cnki.jnju.2017.04.016. [4] 尹鹏智, 戴恩泽. 基于变换域分形的海面小目标快速检测[J]. 电光与控制, 2022, 29(9): 17–21. doi: 10.3969/j.issn.1671-637X.2022.09.004.YIN Pengzhi and DAI Enze. Fast sea surface small target detection based on transform domain fractal[J]. Electronics Optics & Control, 2022, 29(9): 17–21. doi: 10.3969/j.issn.1671-637X.2022.09.004. [5] SHUI Penglang, LI Dongchen, and XU Shuwen. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1416–1430. doi: 10.1109/TAES.2014.120657. [6] SHI Sainan and SHUI Penglang. Sea-surface floating small target detection by one-class classifier in time-frequency feature space[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(11): 6395–6411. doi: 10.1109/TGRS.2018.2838260. [7] 郭泽坤, 刘峥, 谢荣, 等. 基于特征融合的窄带雷达短时观测回波序列空中目标识别[J]. 电子与信息学报, 2024, 46(8): 3184–3192. doi: 10.11999/JEIT231232.GUO Zekun, LIU Zheng, XIE Rong, et al. Airborne target recognition of narrowband radar short time observation echoes based on feature fusion[J]. Journal of Electronics & Information Technology, 2024, 46(8): 3184–3192. doi: 10.11999/JEIT231232. [8] 毛秀华, 张强, 阮航, 等. 多任务协同的多模态遥感目标分割算法[J]. 电子与信息学报, 2024, 46(8): 3363–3371. doi: 10.11999/JEIT231267.MAO Xiuhua, ZHANG Qiang, RUAN Hang, et al. Multitask collaborative multi-modal remote sensing target segmentation algorithm[J]. Journal of Electronics & Information Technology, 2024, 46(8): 3363–3371. doi: 10.11999/JEIT231267. [9] 吴文静, 王中训, 但波, 等. 多模态信息融合舰船目标识别研究进展[J]. 探测与控制学报, 2024, 46(2): 1–12.WU Wenjing, WANG Zhongxun, DAN Bo, et al. A review of ship target recognition based on multi-modal information fusion[J]. Journal of Detection & Control, 2024, 46(2): 1–12. [10] 丁昊, 刘宁波, 董云龙, 等. 雷达海杂波测量试验回顾与展望[J]. 雷达学报, 2019, 8(3): 281–302. doi: 10.12000/JR19006.DING Hao, LIU Ningbo, DONG Yunlong, et al. Overview and prospects of radar sea clutter measurement experiments[J]. Journal of Radars, 2019, 8(3): 281–302. doi: 10.12000/JR19006. [11] 刘宁波, 丁昊, 黄勇, 等. X波段雷达对海探测试验与数据获取年度进展[J]. 雷达学报, 2021, 10(1): 173–182. doi: 10.12000/JR21011.LIU Ningbo, DING Hao, HUANG Yong, et al. Annual progress of the sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2021, 10(1): 173–182. doi: 10.12000/JR21011. [12] 关键, 刘宁波, 王国庆, 等. 雷达对海探测试验与目标特性数据获取——海上目标双极化多海况散射特性数据集[J]. 雷达学报, 2023, 12(2): 456–469. doi: 10.12000/JR23029.GUAN Jian, LIU Ningbo, WANG Guoqing, et al. Sea-detecting radar experiment and target feature data acquisition for dual polarization multistate scattering dataset of marine targets[J]. Journal of Radars, 2023, 12(2): 456–469. doi: 10.12000/JR23029. [13] 刘宁波, 李佳, 王国庆, 等. 雷达对海探测试验与目标特性数据获取——海上目标多源观测数据集[J]. 雷达学报(中英文), 2025, 14(3): 754–780. doi: 10.12000/JR25001.LIU Ningbo, LI Jia, WANG Guoqing, et al. Sea-detecting radar experiment and target feature data acquisition for multisource observation dataset of maritime targets[J]. Journal of Radars, 2025, 14(3): 754–780. doi: 10.12000/JR25001. [14] LIAN Kuo and YANG Wanlin. Extraction of radar target length based on high resolution range profile[C]. Proceedings of 2010 International Conference on Electrical and Control Engineering, Wuhan, China, 2010: 956–959. doi: 10.1109/iCECE.2010.243. [15] 王涛, 李士国, 王秀春. 一种基于高分辨距离像的目标长度特征提取算法[J]. 中国电子科学研究院学报, 2006, 1(6): 532–535. doi: 10.3969/j.issn.1673-5692.2006.06.010.WANG Tao, LI Shiguo, and WANG Xiuchun. Extraction of target length using high resolution range profile[J]. Journal of CARIT, 2006, 1(6): 532–535. doi: 10.3969/j.issn.1673-5692.2006.06.010. [16] 胡生亮, 范学满, 刘忠, 等. 基于集成学习的角反射体目标雷达识别理论与方法[M]. 北京: 电子工业出版社, 2019: 22–36.HU Shengliang, FAN Xueman, LIU Zhong, et al. Theory and Method of Corner Reflector Target Radar Recognition Based on Ensemble Learning[M]. Beijing: Publishing House of Electronics Industry, 2019: 22–36. [17] 王元昊, 王宏强, 杨琪. 动平台分布孔径雷达相参合成探测方法与试验验证[J]. 雷达学报(中英文), 2024, 13(6): 1279–1297. doi: 10.12000/JR24141.WANG Yuanhao, WANG Hongqiang, and YANG Qi. Coherent detection method for moving platform based distributed aperture radar and experimental verification[J]. Journal of Radars, 2024, 13(6): 1279–1297. doi: 10.12000/JR24141. [18] XIE Saining and TU Zhuowen. Holistically-nested edge detection[C]. Proceedings of 2015 IEEE International Conference on Computer Vision, Santiago, Chile, 2015: 1395–1403. doi: 10.1109/ICCV.2015.164. [19] JIN Bowen, ZHANG Yu, MENG Yu, et al. Edgeformers: Graph-empowered transformers for representation learning on textual-edge networks[C]. Proceedings of the 11th International Conference on Learning Representations, Kigali, Rwanda, 2023: 1–5. [20] PRASAD G, GADDALE V S, KAMATH R C, et al. A study of dimensionality reduction in GLCM feature-based classification of machined surface images[J]. Arabian Journal for Science and Engineering, 2024, 49(2): 1531–1553. doi: 10.1007/s13369-023-07854-1. [21] CHENG Gong, YUAN Xiang, YAO Xiwen, et al. Towards large-scale small object detection: Survey and benchmarks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(11): 13467–13488. doi: 10.1109/TPAMI.2023.3290594. -





图(10) / 表(7)
计量
- 文章访问数: 873
- HTML全文浏览量: 462
- PDF下载量: 101
- 被引次数: 0
 下载:
下载:
