

Task Segmentation and Computing Resource Allocation Method Driven by Path Prediction in Internet of Vehicles
-
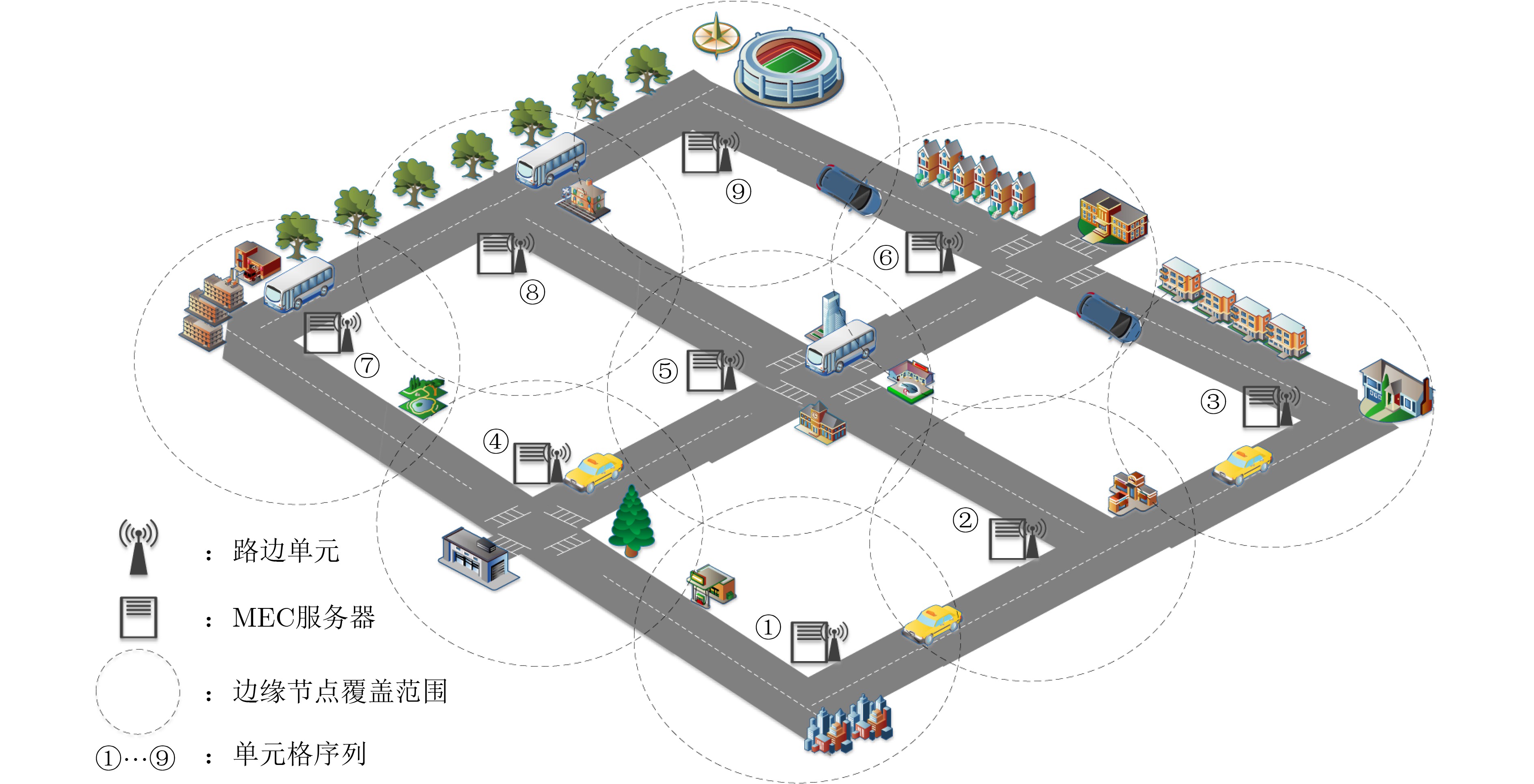
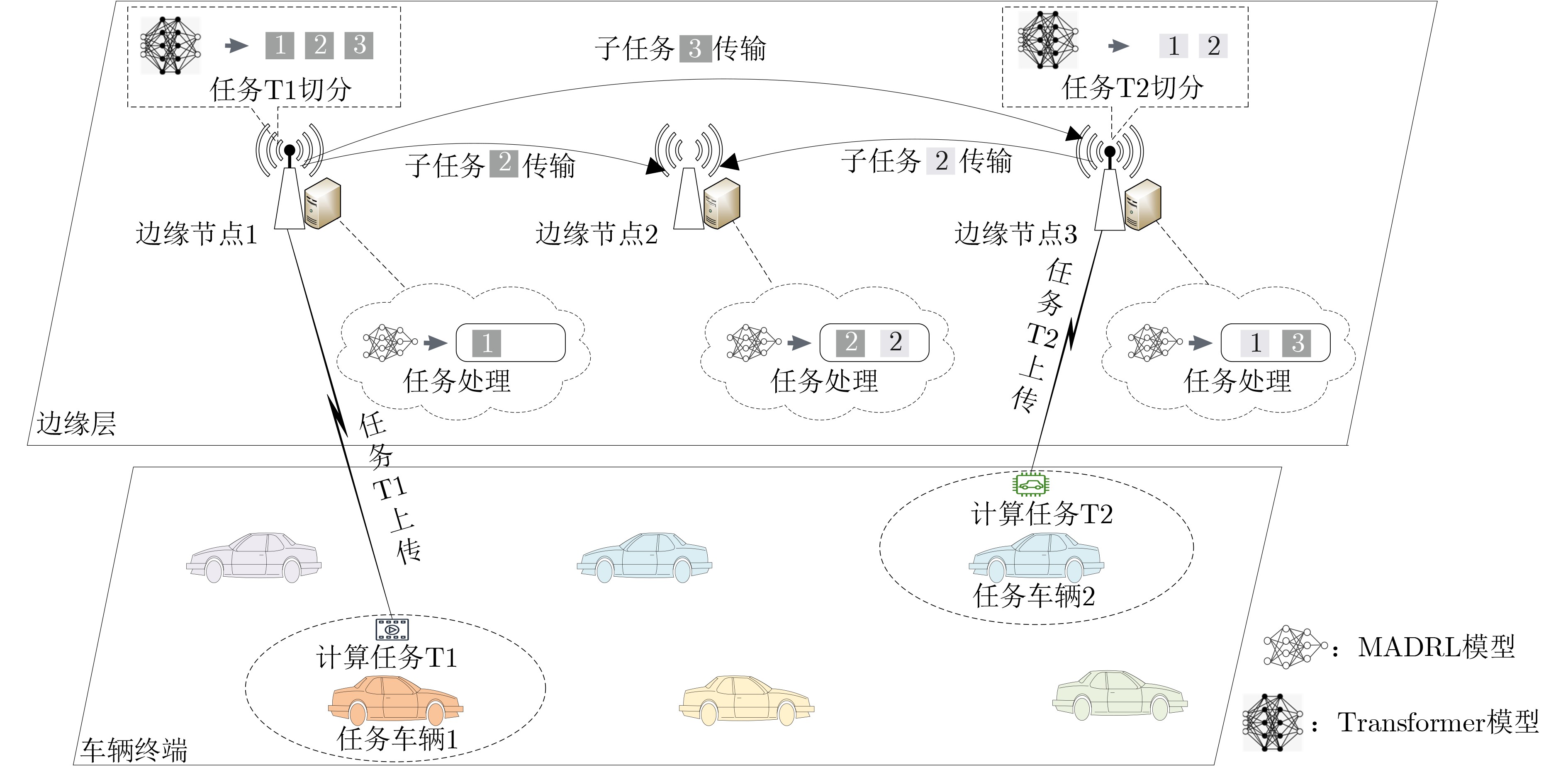
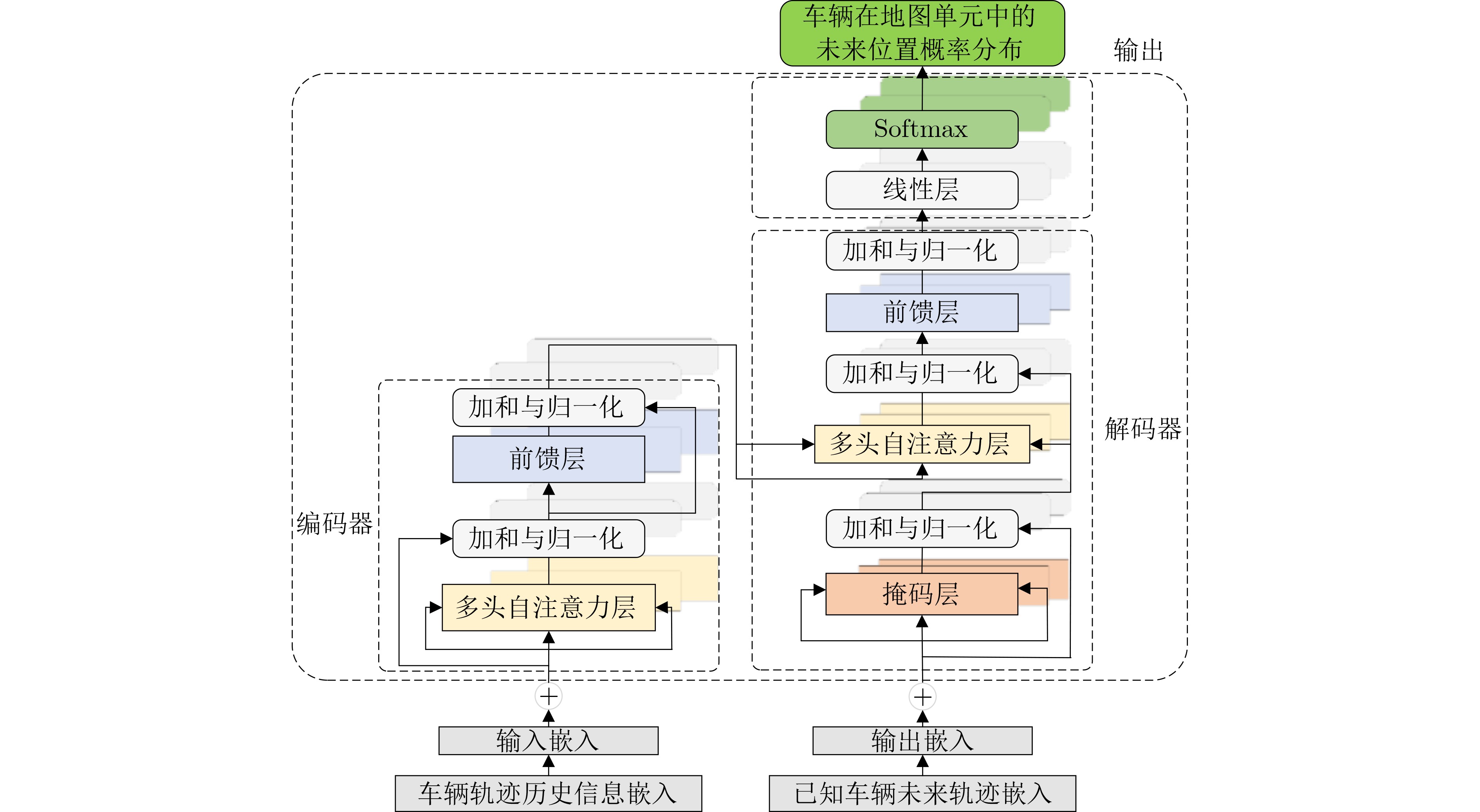
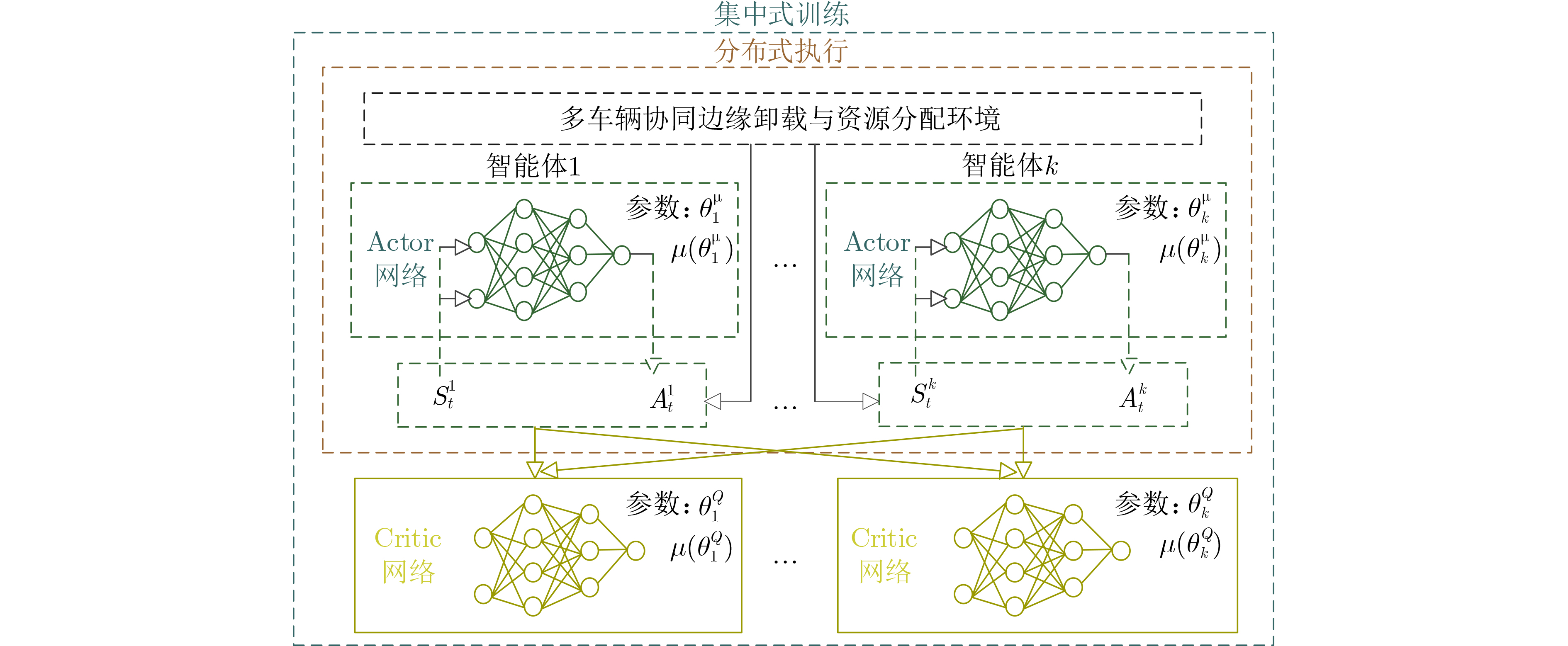
摘要: 为了应对车联网中车辆终端计算资源有限、车辆高移动性导致的网络拓扑环境频繁变化对传输效率和可靠性的影响,解决边缘算力服务设备资源利用不充分等问题,面向车载边缘计算环境,该文提出一种基于车辆路径预测的任务切分卸载与资源分配方法。针对多车辆多边缘设备的任务卸载与资源分配场景,基于Transformer模型对不同车辆的路径预测结果建立智能任务切分模型。基于多智能体深度强化学习(MADRL)算法将计算资源分配问题表述为优化问题,在考虑移动边缘计算(MEC)服务器计算资源的约束条件下,以车辆任务的处理时延和MEC服务器的计算资源利用率为优化目标,实现计算资源的优化分配。仿真结果表明,与基准方法相比,该文所提方法降低54.1%的卸载计算延迟,提升资源利用率达13.3%。
-
关键词:
- 车联网 /
- 任务切分卸载 /
- 计算资源分配 /
- 深度学习 /
- 多智能体深度强化学习
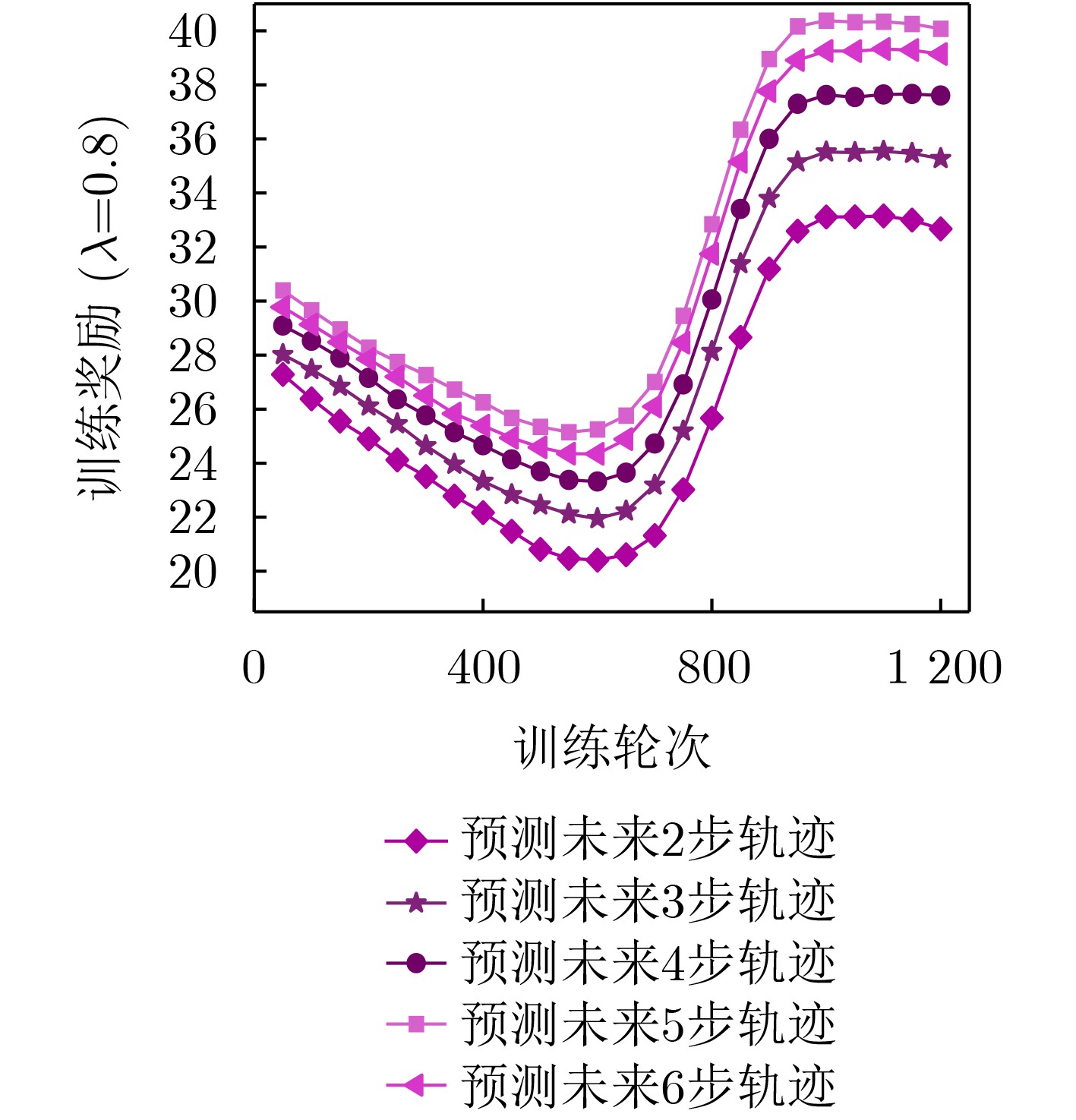
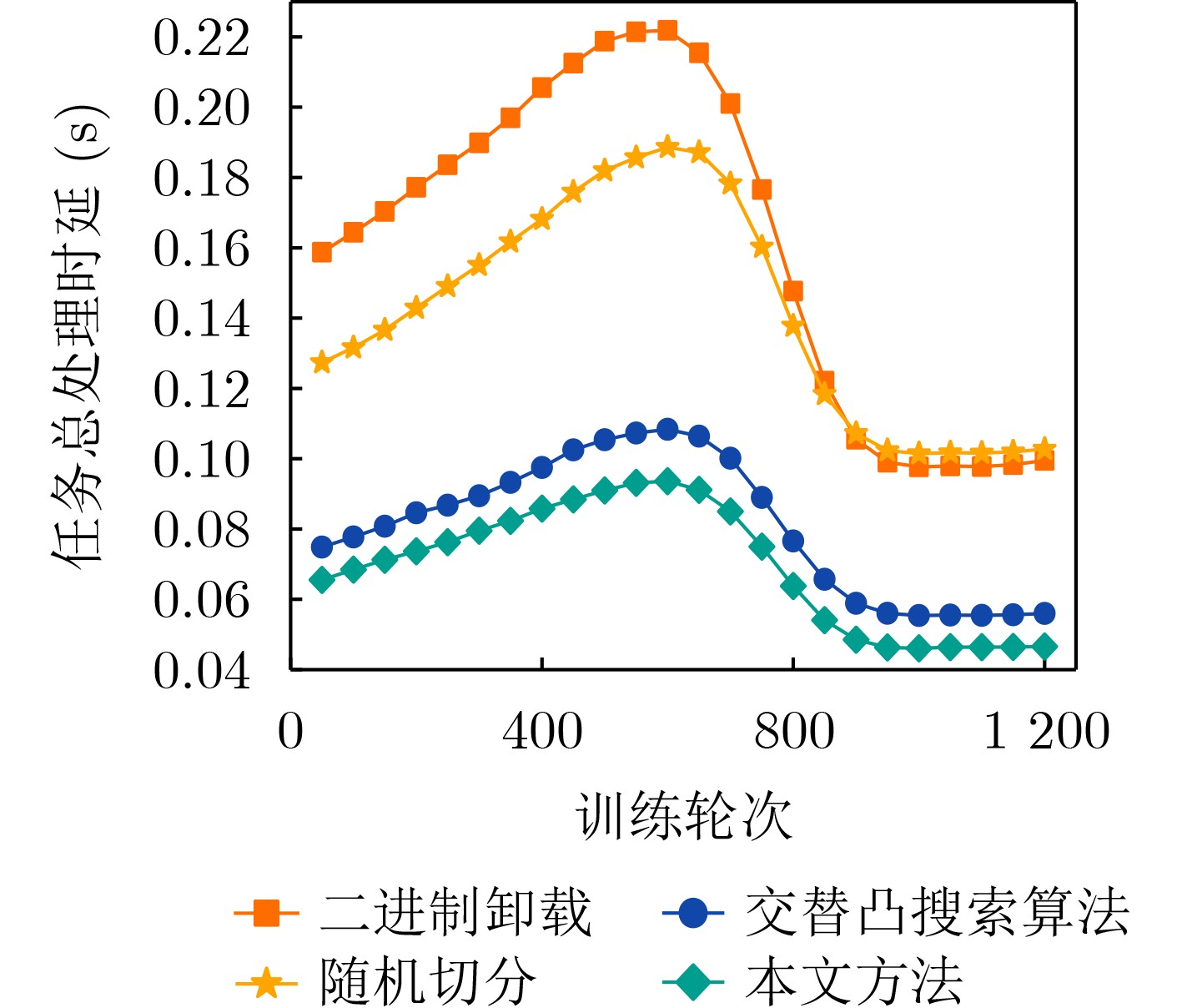
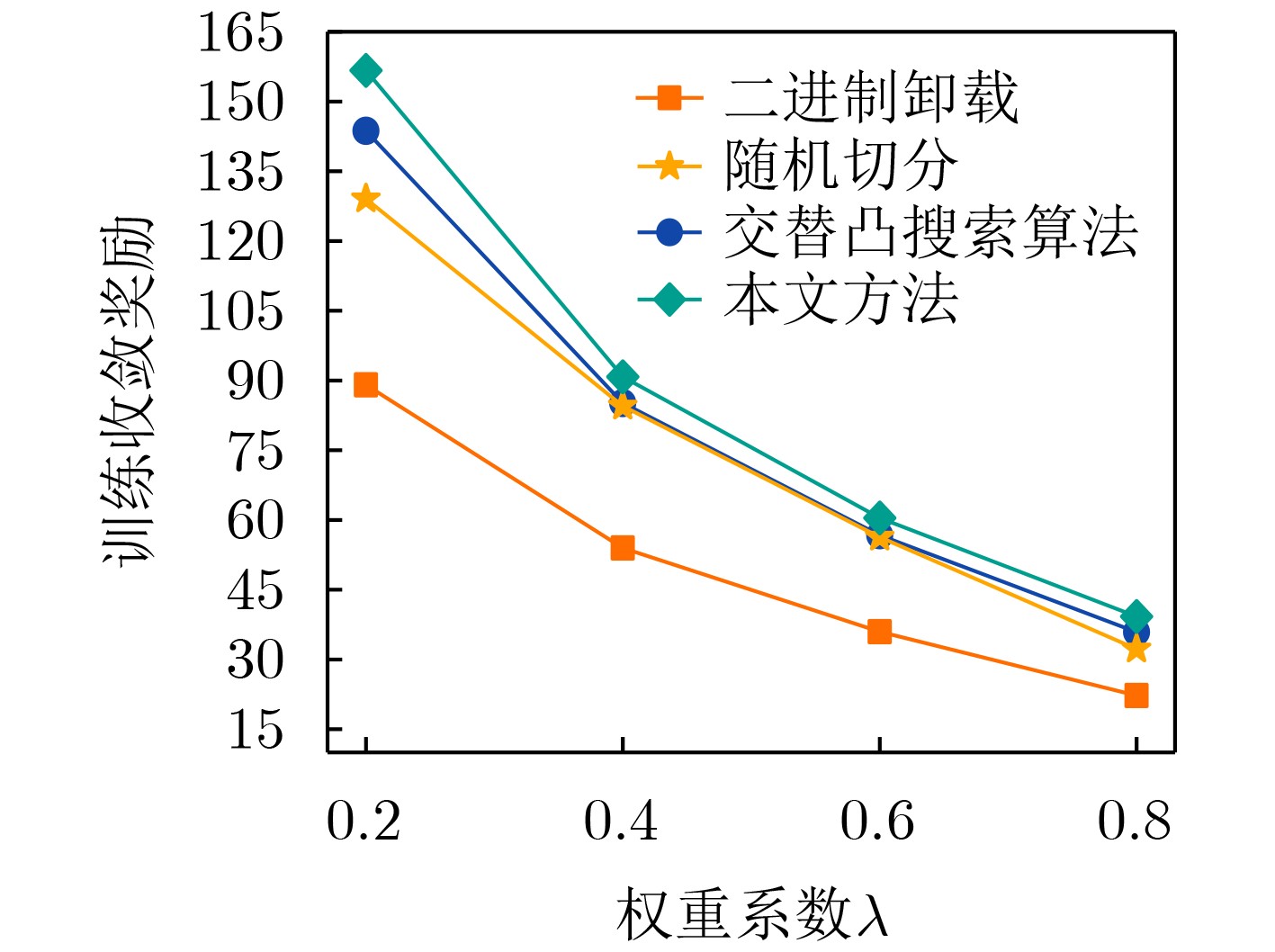
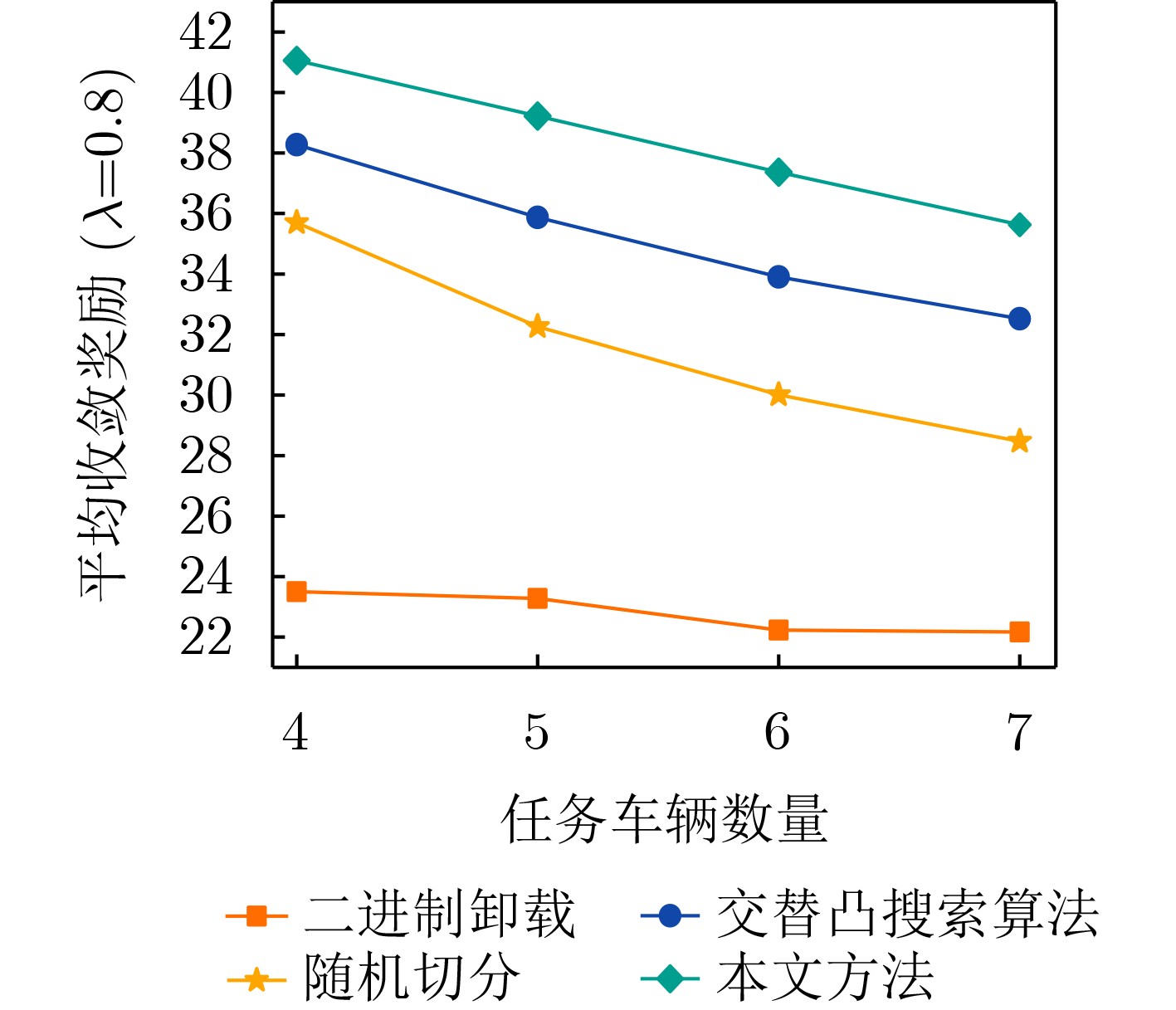
Abstract:Objective The rapid development of 5G and the Internet of Vehicles (IoV) has accelerated the demand for intelligent services and large-scale data processing. However, limited computational capacity at vehicle terminals and frequent topology changes due to high mobility reduce transmission efficiency and reliability. While current task offloading and resource allocation methods meet basic processing needs, they fall short in supporting fine-grained task segmentation and in adapting to the dynamic characteristics of vehicular networks. To address these limitations, this study proposes an optimization approach for task segmentation and computing resource allocation based on Reinforcement Learning (RL). By combining the time-series modeling capabilities of advanced Deep Learning (DL) models with the resource scheduling flexibility of a Multi-Agent Deep Reinforcement Learning (MADRL) algorithm, this method enables intelligent, prediction-driven task segmentation and allocation. It supports decoupled processing and multi-objective optimization of latency and resource use. The proposed framework enhances offloading efficiency and resource utilization in Vehicular Edge Computing (VEC) environments and provides theoretical support for real-time resource management in highly dynamic vehicular networks. Methods The proposed method integrates vehicle trajectory prediction, dynamic task segmentation, and adaptive resource scheduling. For trajectory prediction, historical movement data are preprocessed through trajectory mapping. A Transformer-based model captures long-range temporal dependencies to achieve accurate path prediction. Based on predicted routes and estimated dwell times in different edge zones, a segmentation strategy divides tasks into subtasks to distribute load evenly across edge servers. The resource allocation challenge under this segmentation strategy is modeled as a Markov Decision Process (MDP), with each edge server acting as an agent that interacts with its environment. The state space includes task sizes, server loads, and available resources, while the action space defines the scheduling decisions each agent may select. The reward function is designed to minimize delay and improve efficiency, promoting cooperative behavior across agents. Through continual environmental feedback, the MADRL framework adaptively adjusts resource allocation in response to real-time task demands and server workloads. Results and Discussions The Transformer-based path prediction model outperforms baseline models ( Table 1 ), achieving a Mean Squared Error (MSE) of0.0116 , substantially lower than that of LSTM (0.0246 ) and BiLSTM (0.0323 ). To identify the optimal prediction horizon, the model is evaluated across different prediction steps (Fig. 5 ). The reward increases from 2 to 5 steps but declines beyond 5 due to increased transmission delays caused by frequent edge node handovers. Thus, 5-step prediction is adopted as the optimal setting. The proposed algorithm is assessed against three baseline strategies: binary offloading, random segmentation, and alternating convex search. Under a 5-step horizon and a five-task vehicle scenario (Fig. 6 ), the proposed method reduces average task latency by 54.1% compared with random segmentation and by 16.5% compared with alternating convex search. By tuning the weight coefficient (Fig. 7 ), the method demonstrates balanced performance across latency and resource efficiency objectives. Specifically, at a coefficient of 0.8, it achieves a convergence reward of 39.224, exceeding that of alternating convex search (35.872) by 9.4%. Scalability is evaluated under varying vehicle numbers (Fig. 8 ). The proposed method consistently yields the highest convergence reward across all cases. With four vehicles, it reaches a reward of 41.059, 7.3% higher than alternating convex search (38.277). With seven vehicles, it maintains a reward of 35.630, exceeding the baseline’s 32.524 by 9.6%. Overall, the proposed method exhibits superior latency reduction, higher resource efficiency, and better adaptability across different vehicle densities, validating its effectiveness and scalability for task offloading and resource allocation in VEC systems.Conclusions This study proposes a task segmentation and computing resource allocation method tailored for VEC scenarios. By exploiting the time-series modeling capacity of Transformer networks, the accuracy of vehicle trajectory prediction is enhanced. A dynamic task segmentation strategy is then applied to optimize workload distribution across Mobile Edge Computing (MEC) servers. The use of an MADRL-based cooperative resource allocation approach effectively reduces task latency while improving resource use. Simulation results confirm the method’s effectiveness in minimizing processing delay and enhancing system efficiency. Future research will explore the role of task prioritization in resource allocation and investigate strategies to sustain performance under increased vehicle counts and task complexity in large-scale deployments. -
表 1 不同模型预测性能指标结果
模型 MSE RMSE MAE Transformer 0.0116 0.1081 0.0652 LSTM 0.0246 0.1568 0.1062 BiLSTM 0.0323 0.1796 0.1293  下载: 导出CSV
下载: 导出CSV
-
[1] IP A, IRIO L, and OLIVEIRA R. Vehicle trajectory prediction based on LSTM recurrent neural networks[C]. 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 2021: 1–5. doi: 10.1109/VTC2021-Spring51267.2021.9449038. [2] LIANG Ming, YANG Bin, ZENG Wenyuan, et al. PnPNet: End-to-end perception and prediction with tracking in the loop[C]. 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, USA, 2020: 11550–11559. doi: 10.1109/CVPR42600.2020.01157. [3] LAGOUTARIS V and MOUSTAKAS K. Motion prediction of traffic agents with hybrid recurrent-convolutional neural networks[C]. 2023 24th International Conference on Digital Signal Processing (DSP), Rhodes (Rodos), Greece, 2023: 1–5. doi: 10.1109/DSP58604.2023.10167941. [4] QIAO Shaojie, HAN Nan, WANG Junfeng, et al. Predicting long-term trajectories of connected vehicles via the prefix-projection technique[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(7): 2305–2315. doi: 10.1109/TITS.2017.2750075. [5] HAO Zixu, HUANG Xing, WANG Kaige, et al. Attention -based GRU for driver intention recognition and vehicle trajectory prediction[C]. 2020 4th CAA International Conference on Vehicular Control and Intelligence (CVCI), Hangzhou, China, 2020: 86–91. doi: 10.1109/CVCI51460.2020.9338510. [6] MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al. Attention based vehicle trajectory prediction[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(1): 175–185. doi: 10.1109/TIV.2020.2991952. [7] QIE Tianqi, WANG Weida, YANG Chao, et al. Trajectory prediction method using deep learning for intelligent and connected vehicles[C]. 2023 IEEE 6th International Conference on Industrial Cyber-Physical Systems (ICPS), Wuhan, China, 2023: 1–5. doi: 10.1109/ICPS58381.2023.10128049. [8] LIU Xulei, WANG Yafei, JIANG Kun, et al. Interactive trajectory prediction using a driving risk map-integrated deep learning method for surrounding vehicles on highways[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 19076–19087. doi: 10.1109/TITS.2022.3160630. [9] SINGH A. Trajectory-prediction with vision: A survey[C]. 2023 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Paris, France, 2023: 3310–3315. doi: 10.1109/ICCVW60793.2023.00356. [10] WANG Haipeng, LIN Zhipeng, GUO Kun, et al. Computation offloading based on game theory in MEC-assisted V2X networks[C]. 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, Canada, 2021: 1–6. doi: 10.1109/ICCWorkshops50388.2021.9473788. [11] TANG Dian, ZHANG Xuefei, and TAO Xiaofeng. Delay-optimal temporal-spatial computation offloading schemes for vehicular edge computing systems[C]. 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 2019: 1–6. doi: 10.1109/WCNC.2019.8885702. [12] PHAM X Q, HUYNH-THE T, HUH E N, et al. Partial computation offloading in parked vehicle-assisted multi-access edge computing: A game-theoretic approach[J]. IEEE Transactions on Vehicular Technology, 2022, 71(9): 10220–10225. doi: 10.1109/TVT.2022.3182378. [13] ZHANG Haibo, LIU Xiangyu, XU Yongjun, et al. Partial offloading and resource allocation for MEC-assisted vehicular networks[J]. IEEE Transactions on Vehicular Technology, 2024, 73(1): 1276–1288. doi: 10.1109/TVT.2023.3306939. [14] QIN Meng, CHENG Nan, JING Zewei, et al. Service-oriented energy-latency tradeoff for IoT task partial offloading in MEC-enhanced multi-RAT networks[J]. IEEE Internet of Things Journal, 2021, 8(3): 1896–1907. doi: 10.1109/JIOT.2020.3015970. [15] WU Yuan, SHI Binghua, QIAN Liping, et al. Energy-efficient multi-task multi-access computation offloading via NOMA transmission for IoTs[J]. IEEE Transactions on Industrial Informatics, 2020, 16(7): 4811–4822. doi: 10.1109/TII.2019.2944839. [16] MALEKI H, BAŞARAN M, and DURAK-ATA L. Handover-enabled dynamic computation offloading for vehicular edge computing networks[J]. IEEE Transactions on Vehicular Technology, 2023, 72(7): 9394–9405. doi: 10.1109/TVT.2023.3247889. [17] ZHANG Cui, ZHANG Wenjun, WU Qiong, et al. Distributed deep reinforcement learning-based gradient quantization for federated learning enabled vehicle edge computing[J]. IEEE Internet of Things Journal, 2025, 12(5): 4899–4913. doi: 10.1109/JIOT.2024.3447036. [18] YUAN Jing, ZHENG Yu, XIE Xing, et al. Driving with knowledge from the physical world[C]. The 17th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Diego, USA, 2011: 316–324. doi: 10.1145/2020408.2020462. [19] YUAN Jing, ZHENG YÜ, ZHANG Chengyang, et al. T-drive: Driving directions based on taxi trajectories[C]. 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems, San Jose, USA, 2010: 99–108. doi: 10.1145/1869790.1869807. [20] LIN Jie, HUANG Siqi, ZHANG Hanlin, et al. A deep-reinforcement-learning-based computation offloading with mobile vehicles in vehicular edge computing[J]. IEEE Internet of Things Journal, 2023, 10(17): 15501–15514. doi: 10.1109/JIOT.2023.3264281. [21] DENG Taoyu, CHEN Yueyun, CHEN Guang, et al. Task offloading based on edge collaboration in MEC-enabled IoV networks[J]. Journal of Communications and Networks, 2023, 25(2): 197–207. doi: 10.23919/JCN.2023.000004. -



图(8) / 表(1)
计量
- 文章访问数: 602
- HTML全文浏览量: 379
- PDF下载量: 49
- 被引次数: 0
 下载:
下载:
