

Trust Adaptive Event-triggered Robust Extended Kalman Fusion Filtering for Target Tracking
-
摘要: 在资源受限移动无线传感器网络(MWSN)下的目标跟踪问题中,考虑到目标运动建模与接收信号强度(RSS)的不确定性,该文提出一种信任自适应事件触发鲁棒扩展卡尔曼融合滤波方法。首先,设计一种信任自适应事件驱动锚点调度与信息交互机制,其能适应目标周围信任锚点的分布,动态调度接近期望数量的信任锚点及其与移动目标间的信息交互,旨在确保信任测量下减少系统的电能、计算和带宽资源消耗。同时,构建一种基于均值漂移的鲁棒扩展卡尔曼信任融合滤波算法,通过对均匀分布的过程噪声协方差和测量噪声协方差进行随机采样,补偿运动建模和接收信号强度量化的不确定性,并仅对信任节点测量进行自适应权重融合估计,以改善目标跟踪的稳定性、鲁棒性与精确性。仿真结果表明:所提方法在降低电能、计算及带宽资源消耗的同时,提高了移动目标的跟踪精度,并展现出了对不确定性和异常节点测量的鲁棒性。Abstract:
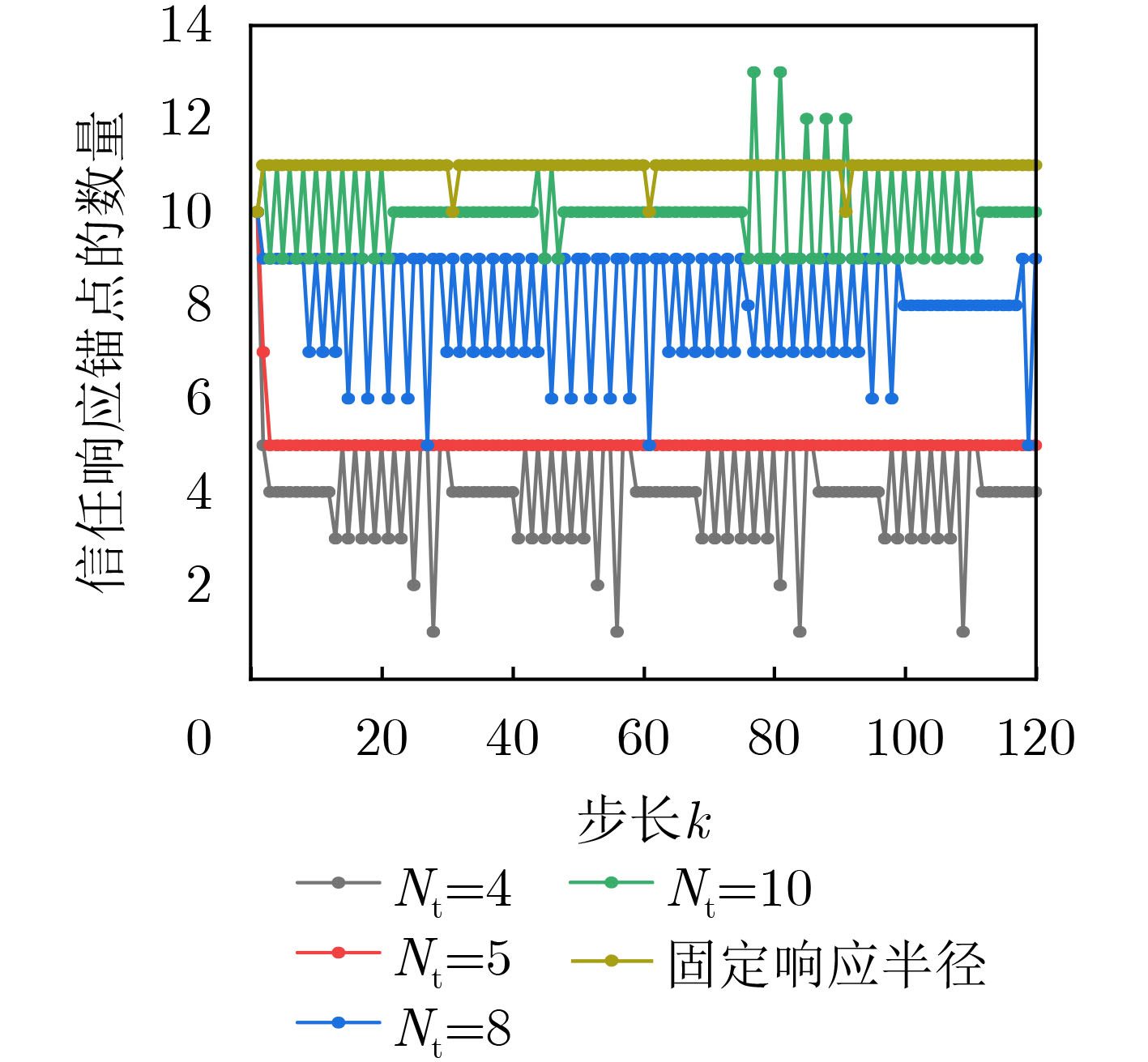
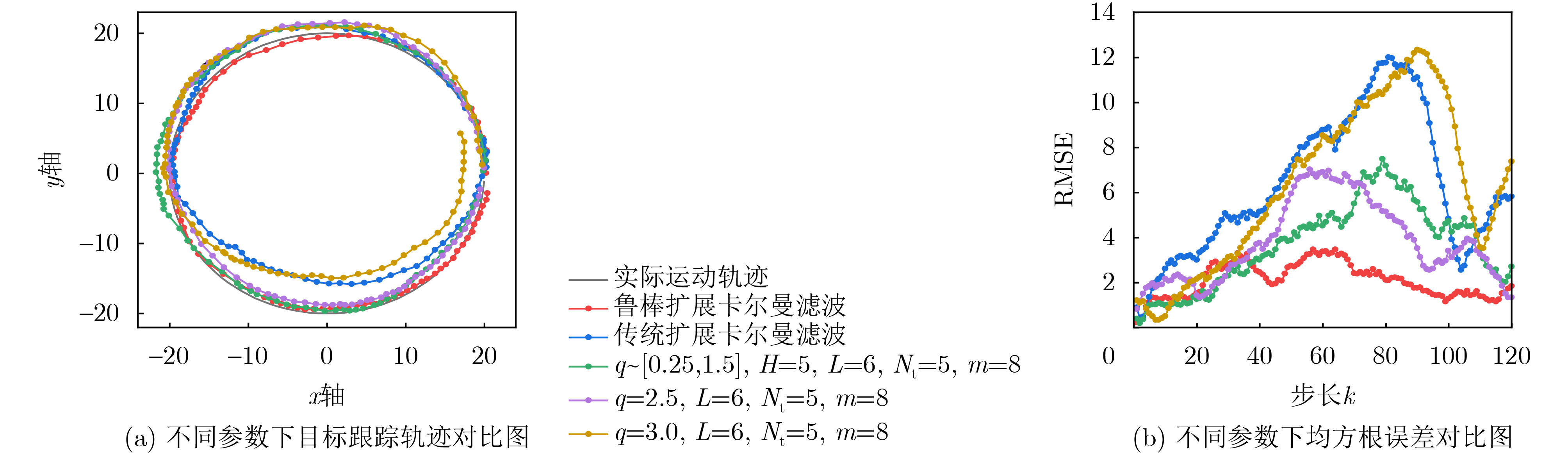
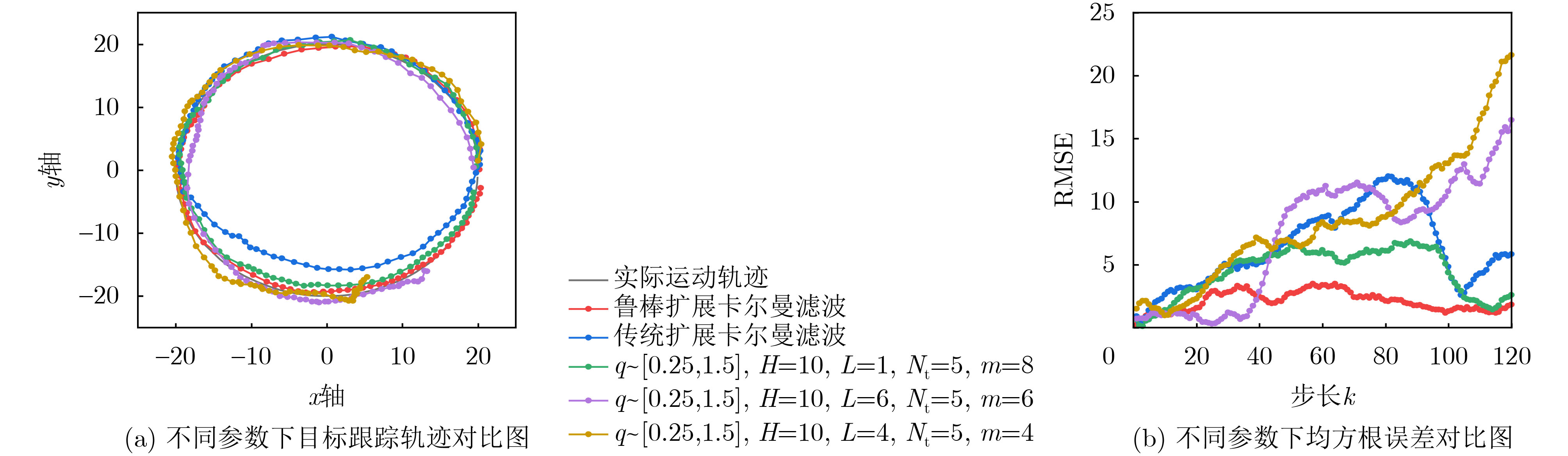
Objective Mobile Wireless Sensor Networks (MWSNs) with dynamic topology exhibit considerable application value across various fields, making target tracking a critical area of research. Although conventional filtering algorithms and event-triggered schemes have enabled basic target tracking, they remain limited in addressing motion modeling errors, Received Signal Strength (RSS) quantization inaccuracies, and adaptation to dynamic network conditions. To overcome these limitations, this study proposes a trust-adaptive event-triggered mechanism combined with an improved Extended Kalman Filter (EKF). The mechanism dynamically schedules a suitable number of trust anchor nodes based on network conditions, while the robust EKF estimates the motion state of the mobile target. This approach ensures stable, accurate, and consistent estimation even under time-varying process and measurement noise covariance. The proposed method offers an effective solution for RSS-based tracking in resource-constrained MWSNs by reducing power, computation, and bandwidth consumption, while improving tracking accuracy and maintaining robustness against measurement uncertainty and faulty nodes. Methods In the resource-constrained MWSN environment, a robust extended Kalman fusion filtering method with trust-adaptive event triggering is proposed for target tracking. This method incorporates a trust-adaptive, event-driven anchor node scheduling and information exchange mechanism. It dynamically adjusts to the spatial distribution of trusted anchor nodes near the target, schedules a number of anchor nodes close to the optimal value, and streamlines communication between these nodes and the mobile target. This design substantially reduces power, computational, and bandwidth demands while maintaining measurement credibility. To address uncertainties arising from motion modeling and RSS quantization, a robust extended Kalman trust fusion filtering algorithm based on mean drift is developed. The algorithm estimates the actual covariance by randomly sampling uniformly distributed process and measurement noise covariance matrices, thereby compensating for discrepancies between model predictions and observations. Additionally, only measurements from nodes identified as reliable are incorporated via adaptive weighted fusion, which enhances the stability, robustness, and accuracy of target tracking. Results and Discussions The proposed trust-adaptive event-triggered robust extended Kalman fusion filtering method substantially improves target tracking performance in resource-constrained MWSNs. By integrating a dynamic anchor node scheduling mechanism with a dual-layer noise compensation strategy, the method adjusts the response radius in real time through trust-adaptive event triggering. Therefore, the average number of trust response anchors remains stable at a preset target—for example, ANoTRA = 5.0583 when $ {{N}}_{\text{t}} $ = 5—while reducing communication resource consumption by 53.8% compared with the fixed threshold method (Fig. 2 ;Table 2 ). Furthermore, the use of uniformly distributed random sampling enables the algorithm to account for system uncertainty when the process noise covariance q is within [0.25, 1.5]. The introduction of a mean-shift algorithm helps to eliminate abnormal measurements, leading to a 42.6% reduction in tracking Root-Mean-Square Error (RMSE) compared with traditional approaches (Fig. 3 ,Fig. 4 ,Fig. 5 ). Under complex environmental conditions, with parameters set as q ∈ [0.25, 1.5], H = 10, L = 6, $ {{N}}_{\text{t}} $ = 5, and m = 8, the method demonstrates high accuracy and robustness. These results indicate that the proposed approach not only enhances tracking precision but also significantly improves the efficiency of resource utilization.Conclusions This study addresses the problem of mobile target tracking in resource-constrained MWSNs by integrating a trust-adaptive event-triggering mechanism with a robust extended Kalman fusion filtering algorithm. The proposed method leverages the advantages of trust-based adaptive triggering and robust filtering to achieve high tracking accuracy while reducing power, computational, and communication overhead. Simulation results demonstrate that (1) the robust EKF reduces the tracking root mean square error by 42.6% compared with the conventional EKF, and (2) the trust-adaptive event-triggering mechanism reduces communication resource consumption by 53.8% relative to static schemes such as non-trust-based adaptive triggering. This work focuses on tracking under low-noise conditions. Future research will extend the method to more complex nonlinear systems and explore the integration of statistical approaches and deep learning techniques for enhanced outlier identification and suppression under high interference. -
1 信任自适应事件驱动锚点调度与信息传输机制
1.移动节点通过单跳通信发送定位请求信号给周围锚点,定位请
求信号包括自身信息及响应半径。2.锚点测量并量化请求信号的RSS值${y_k}$。 3.当RSS测量值${y_k}$满足式(16)时,锚点被调度为响应锚。响应锚
依据式(18)生成RSS预滤波值${\hat y_k}$。4.当RSS测量值${y_k}$同时满足式(17)时,响应锚将其RSS测量值发
送给移动目标。5.移动目标汇总所有响应锚的RSS数据以及ID信息,并统计响应
锚点的数量。6.根据式(9)将目标汇总的RSS数据转换成距离值。  下载: 导出CSV
下载: 导出CSV
2 信任自适应事件触发鲁棒扩展卡尔曼融合滤波
1. 初始化滤波器参数${\hat {\boldsymbol x}_{0|0}},{{\boldsymbol{P}}_{0|0}},{{\boldsymbol Q}_0},{{\boldsymbol{R}}_0}$,期望信任的响应锚点数量${N_{\rm t}}$,起始响应半径${y_{{\mathrm{rad}}(0)}}$ 2. while 3. 应用算法1 4. 通过式(20)、式(21)计算目标的先验状态值和误差协方差 5. for $i = 1:{N_{\mathrm{r}}}$ 6. for $l = 1:L$ 7. 通过式(22)、式(23)生成移动目标的多重采样状态估计
及误差协方差8. 通过式(24)生成滤波增益,并通过式(25)计算非线性距
离函数的雅可比矩阵9. end for $l$ 10. 通过式(26)、式(27)计算移动目标的后验状态估计和协方
差矩阵11. end for $i$ 12. 通过式(28)提取预信任集 13. while ${\text{|| }}{{\boldsymbol{m}}_{k + 1}} - {{\boldsymbol{m}}_k}|{|_2} \le \varepsilon $ 14. 通过式(29)、式(30)确定基于均值漂移的信任集 15. 由式(31)、式(32)计算目标的信任融合状态估计值和协
方差矩阵16. end while${\text{|| }}{{\boldsymbol{m}}_{k + 1}} - {{\boldsymbol{m}}_k}|{|_2} \le \varepsilon $ 17.设置$k = k + 1$ 18.end while
下载: 导出CSV
表 1 数值仿真参数列表
参数 数值大小 监测区域的尺寸(cm) 2 000×2 000 初始响应半径(cm) 200 采样时间间隔(s) 1 实际量化比特数(bits) 8 观测噪声协方差 $ {{R}}_{{k}}\text{=}\text{0.003}\text{×}{h}\left({{{\boldsymbol{x}}}}_{{k}}\text{,}{{\boldsymbol{{x}}}}^{{i}}\right) $ 过程噪声协方差 $ {\boldsymbol{Q}}_{{k}}\text{=}{{q}}_{{k}}\text{×}{\boldsymbol{I}}_{\text{4×4}} $
下载: 导出CSV
表 2 各种事件触发机制的 TNoTRA和 ANoTRA
不同事件
触发机制固定响应
半径(cm)${N_{\mathrm{t}}} = 4$ ${N_{\mathrm{t}}} = 5$ ${N_{\mathrm{t}}} = 8$ ${N_{\mathrm{t}}} = 10$ TNoTRA 1316 483 607 965 1199 ANoTRA 10.9667 4.0250 5.0583 8.0417 9.9917
下载: 导出CSV
-
[1] GHATAOURA D S, MITCHELL J E, and MATICH G E. Networking and application interface technology for wireless sensor network surveillance and monitoring[J]. IEEE Communications Magazine, 2011, 49(10): 90–97. doi: 10.1109/MCOM.2011.6035821. [2] FANG Zheng, KONG Lingji, CHEN Jiangfan, et al. A multi-node self-powered fault detection system by triboelectric-electromagnetic nanosensors for smart transportation[J]. Nano Energy, 2024, 128: 109882. doi: 10.1016/j.nanoen.2024.109882. [3] BHASKER B and MURALI S. An Energy-Efficient Cluster-based data aggregation for agriculture irrigation management system using wireless sensor networks[J]. Sustainable Energy Technologies and Assessments, 2024, 65: 103771. doi: 10.1016/j.seta.2024.103771. [4] CACCIUTTOLO C, ATENCIO E, KOMARIZADEHASL S, et al. Internet of Things long-range-wide-area-network-based wireless sensors network for underground mine monitoring: Planning an efficient, safe, and sustainable labor environment[J]. Sensors, 2024, 24(21): 6971. doi: 10.3390/s24216971. [5] ALJUMAH A, AHANGER T A, and ULLAH I. Internet of things-based secure architecture to automate industry[J]. Cluster Computing, 2024, 27(8): 11103–11118. doi: 10.1007/s10586-024-04499-z. [6] 孟令军, 王宏涛, 夏善红. WSN节点声测距TOA值频域估计方法[J]. 电子与信息学报, 2010, 32(4): 993–997. doi: 10.3724/SP.J.1146.2009.00127.MENG Lingjun, WANG Hongtao, and XIA Shanhong. TOA estimation method in frequency domain for acoustic ranging of WSN Node[J]. Journal of Electronics & Information Technology, 2010, 32(4): 993–997. doi: 10.3724/SP.J.1146.2009.00127. [7] QIN Gezhou, LI Ming, FANG Sayin, et al. Study of a grid-based regional localization method for damage sources during three-point bending tests of wood[J]. Construction and Building Materials, 2024, 419: 135348. doi: 10.1016/j.conbuildmat.2024.135348. [8] CAI Zhen, ZHANG Fanhang, TAN Yuan, et al. Integration of an IoT sensor with angle-of-arrival-based angle measurement in AGV navigation: A reliability study[J]. Journal of Industrial Information Integration, 2024, 42: 100707. doi: 10.1016/j.jii.2024.100707. [9] 鲜江峰, 马俊领, 吴华锋, 等. 多参数未知下水声传感网由粗到精的定位方法[J]. 控制与决策, 2025, 40(1): 38–47. doi: 10.13195/j.kzyjc.2024.0521.XIAN Jiangfeng, MA Junling, WU Huafeng, et al. Coarse-to-fine localization method for UASNs under unknown multi-marameters[J]. Control and Decision, 2025, 40(1): 38–47. doi: 10.13195/j.kzyjc.2024.0521. [10] GANTASSI R, MESSOUS S, MASOOD Z, et al. Enhanced network QoS in large scale and high sensor node density wireless sensor networks using (IR-DV-Hop) localization algorithm and Mobile Data Collector (MDC)[J]. IEEE Access, 2024, 12: 37957–37973. doi: 10.1109/ACCESS.2024.3370432. [11] REKHA and GARG R. K-LionER: Meta-heuristic approach for energy efficient cluster based routing for WSN-assisted IoT networks[J]. Cluster Computing, 2024, 27(4): 4207–4221. doi: 10.1007/s10586-024-04280-2. [12] TAGNE E F, KAMDJOU H M, AMRAOUI A E, et al. A lossless distributed data compression and aggregation methods for low resources wireless sensors platforms[J]. Wireless Personal Communications, 2023, 128(1): 621–643. doi: 10.1007/s11277-022-09970-x. [13] 高慧敏, 杨磊, 朱军龙, 等. 基于事件触发的通信有效联邦学习算法[J]. 电子与信息学报, 2023, 45(10): 3710–3718. doi: 10.11999/JEIT220131.GAO Huimin, YANG Lei, ZHU Junlong, et al. Communication-efficient federated learning algorithm based on event triggering[J]. Journal of Electronics & Information Technology, 2023, 45(10): 3710–3718. doi: 10.11999/JEIT220131. [14] GE Xiaohua, HAN Qinglong, and WANG Zidong. A dynamic event-triggered transmission scheme for distributed set-membership estimation over wireless sensor networks[J]. IEEE Transactions on Cybernetics, 2019, 49(1): 171–183. doi: 10.1109/TCYB.2017.2769722. [15] GE Xiaohua and HAN Qinglong. Distributed formation control of networked multi-agent systems using a dynamic event-triggered communication mechanism[J]. IEEE Transactions on Industrial Electronics, 2017, 64(10): 8118–8127. doi: 10.1109/TIE.2017.2701778. [16] ZOU Fangling and WU Kang. Practical prescribed time tracking control for a class of nonlinear systems with event triggering and output constraints[J]. International Journal of Robust and Nonlinear Control, 2024, 34(17): 11786–11803. doi: 10.1002/rnc.7612. [17] 王鼎, 胡凌治, 赵明明, 等. 未知非线性零和博弈最优跟踪的事件触发控制设计[J]. 自动化学报, 2023, 49(1): 91–101. doi: 10.16383/j.aas.c220378.WANG Ding, HU Lingzhi, ZHAO Mingming, et al. Event-triggered control design for optimal tracking of unknown nonlinear zero-sum games[J]. Acta Automatica Sinica, 2023, 49(1): 91–101. doi: 10.16383/j.aas.c220378. [18] BAI Shuo, HU Jingyu, YAN Yongjun, et al. An integrated approach for vehicle state estimation under non-ideal conditions using adaptive strong tracking maximum correntropy criterion EKF[J]. IEEE Transactions on Vehicular Technology, 2024, 73(10): 14604–14616. doi: 10.1109/TVT.2024.3399065. [19] KANG Jiarong, WANG Yi, and XIONG Xiaobin. Fast decentralized state estimation for legged robot locomotion via EKF and MHE[J]. IEEE Robotics and Automation Letters, 2024, 9(12): 10914–10921. doi: 10.1109/LRA.2024.3483043. [20] CHARKHGARD M and FARROKHI M. State-of-charge estimation for lithium-ion batteries using neural networks and EKF[J]. IEEE Transactions on Industrial Electronics, 2010, 57(12): 4178–4187. doi: 10.1109/TIE.2010.2043035. [21] 周云, 胡锦楠, 赵瑜, 等. 基于卡尔曼滤波改进压缩感知算法的车辆目标跟踪[J]. 湖南大学学报(自然科学版), 2023, 50(1): 11–21. doi: 10.16339/j.cnki.hdxbzkb.2023002.ZHOU Yun, HU Jinnan, ZHAO Yu, et al. Vehicle target tracking based on kalman filtering improved compressed sensing algorithm[J]. Journal of Hunan University (Natural Sciences), 2023, 50(1): 11–21. doi: 10.16339/j.cnki.hdxbzkb.2023002. [22] YU Xingkai and MENG Ziyang. Robust Kalman filters with unknown covariance of multiplicative noise[J]. IEEE Transactions on Automatic Control, 2024, 69(2): 1171–1178. doi: 10.1109/TAC.2023.3277866. [23] WANG Yiting, FU Jingqi, and WU Zetai. A novel fusion estimation method for RSS-AOA-based indoor target tracking[J]. IEEE Sensors Journal, 2024, 24(14): 22632–22647. doi: 10.1109/JSEN.2024.3405546. [24] GUO Guangyi, CHEN Ruizhi, YAN Ke, et al. Multichannel and multi-RSS based BLE range estimation for indoor tracking of commercial smartphones[J]. IEEE Sensors Journal, 2023, 23(24): 30728–30738. doi: 10.1109/JSEN.2023.3328711. [25] GUO Guangyi, CHEN Ruizhi, NIU Xiaoguang, et al. Factor graph framework for smartphone indoor localization: Integrating data-driven PDR and Wi-Fi RTT/RSS ranging[J]. IEEE Sensors Journal, 2023, 23(11): 12346–12354. doi: 10.1109/JSEN.2023.3267121. [26] ZHU Hongbo, AMURI M J V, LI Xueyang, et al. Mean-shift-based outliers-robust distributed Kalman filter for wireless sensor network systems[J]. IEEE Transactions on Instrumentation and Measurement, 2025, 74: 9500312. doi: 10.1109/TIM.2024.3497172. -


 下载:
下载:



图(5) / 表(4)
计量
- 文章访问数: 595
- HTML全文浏览量: 412
- PDF下载量: 46
- 被引次数: 0
