

Autonomous Teaming and Task Collaboration for Multi-Agent Systems in Dynamic Environments
-
摘要: 在作战单元可能毁伤的作战环境下,作战单元面对复杂战场环境需临机合成合适数量的多个战术作战单元作战群,并自动划分作战单元作战群归属。该文提出一种自适应聚类合同网算法,通过聚类指标的2阶相对变化率确定作战群数,并根据该作战群数通过聚类实现作战单元的作战群划分;同时,通过基于多层合同网方法的作战群投标、作战群内作战单元投标,实现多个复杂分散战术作战任务的预分配。通过任务重分配与任务交换流程,以实现战术作战任务的最终更优分配。本研究综合考虑作战单元的属性以及任务信息,实现多作战单元的作战群自适应划分以及作战任务的优化分配。Abstract:
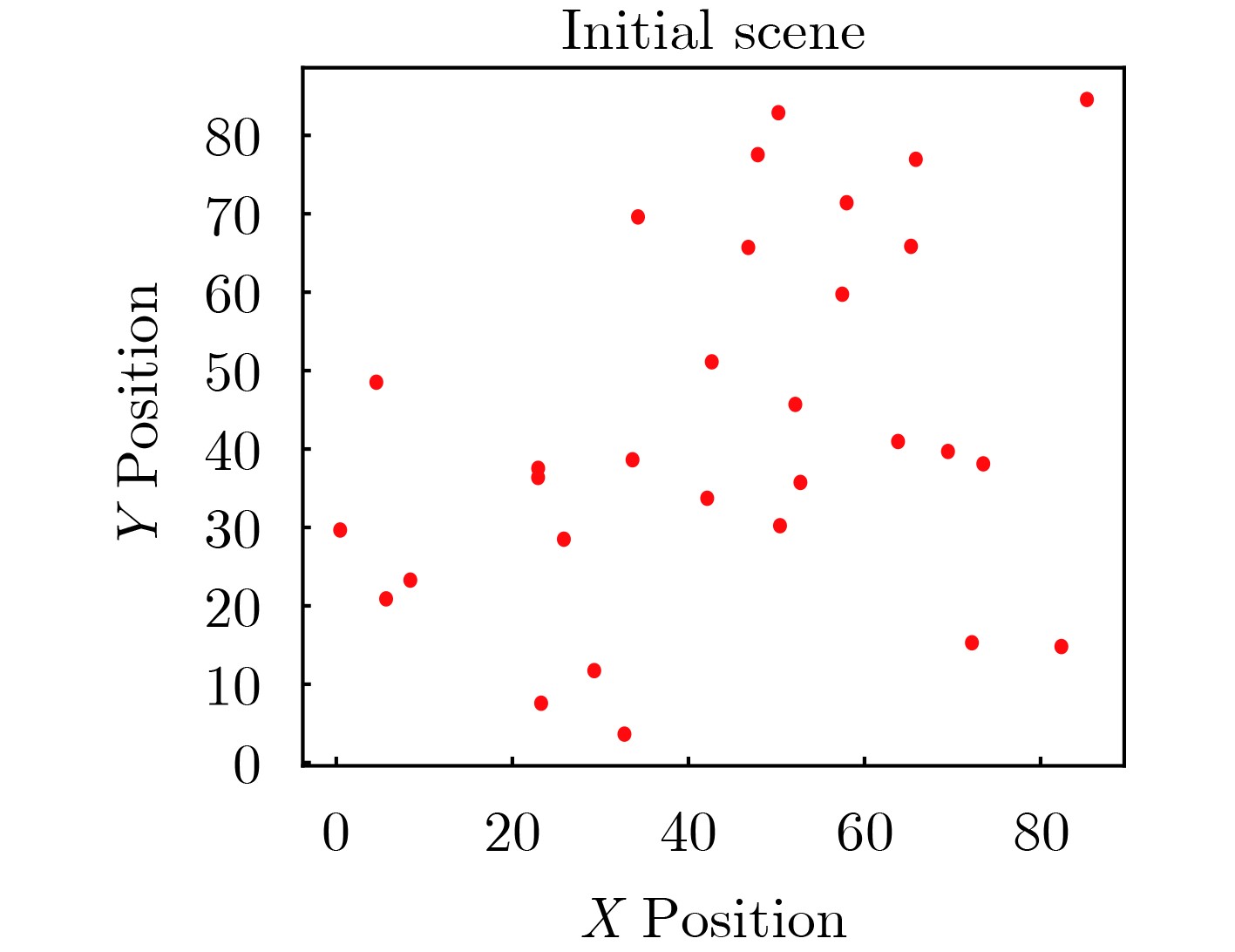
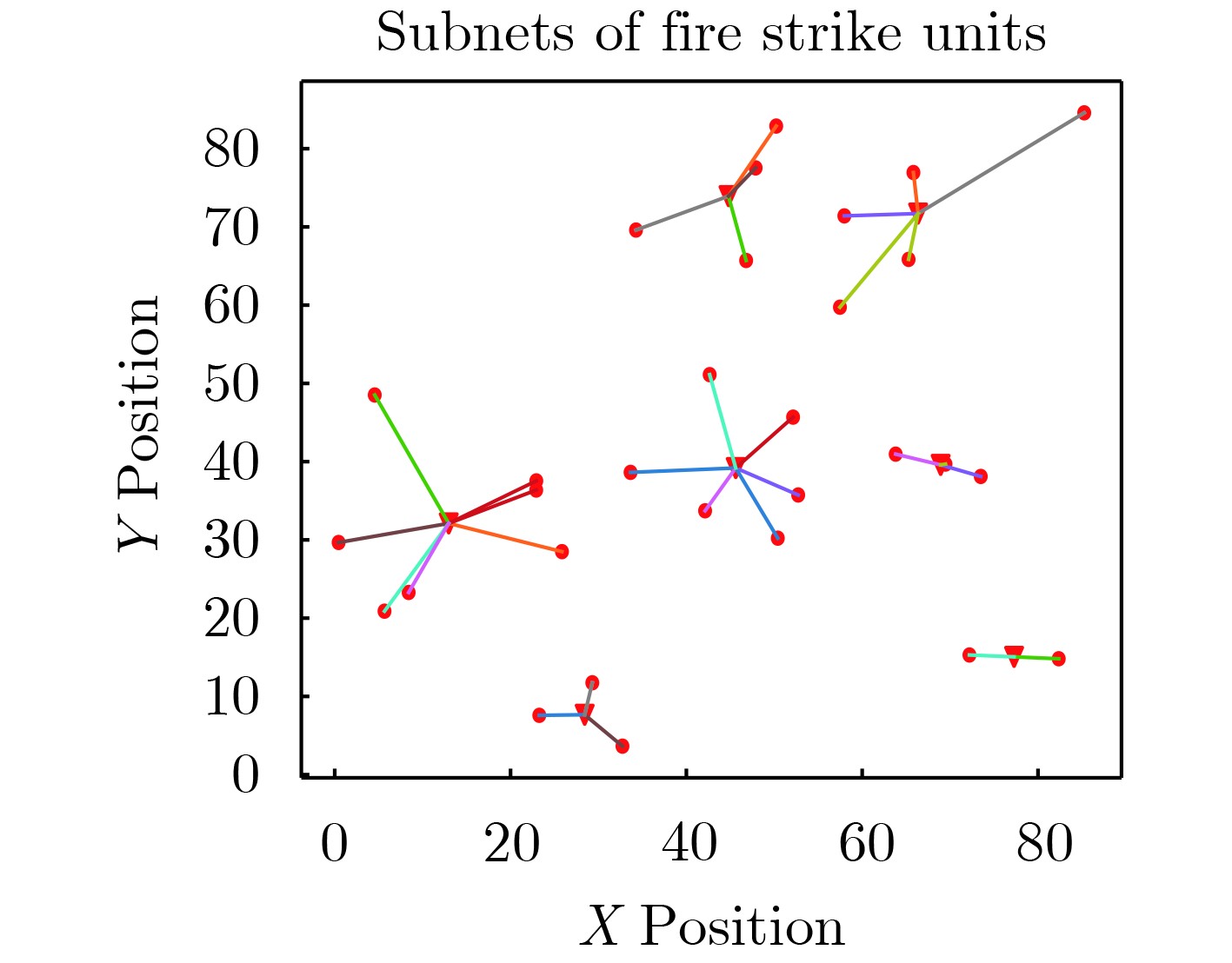
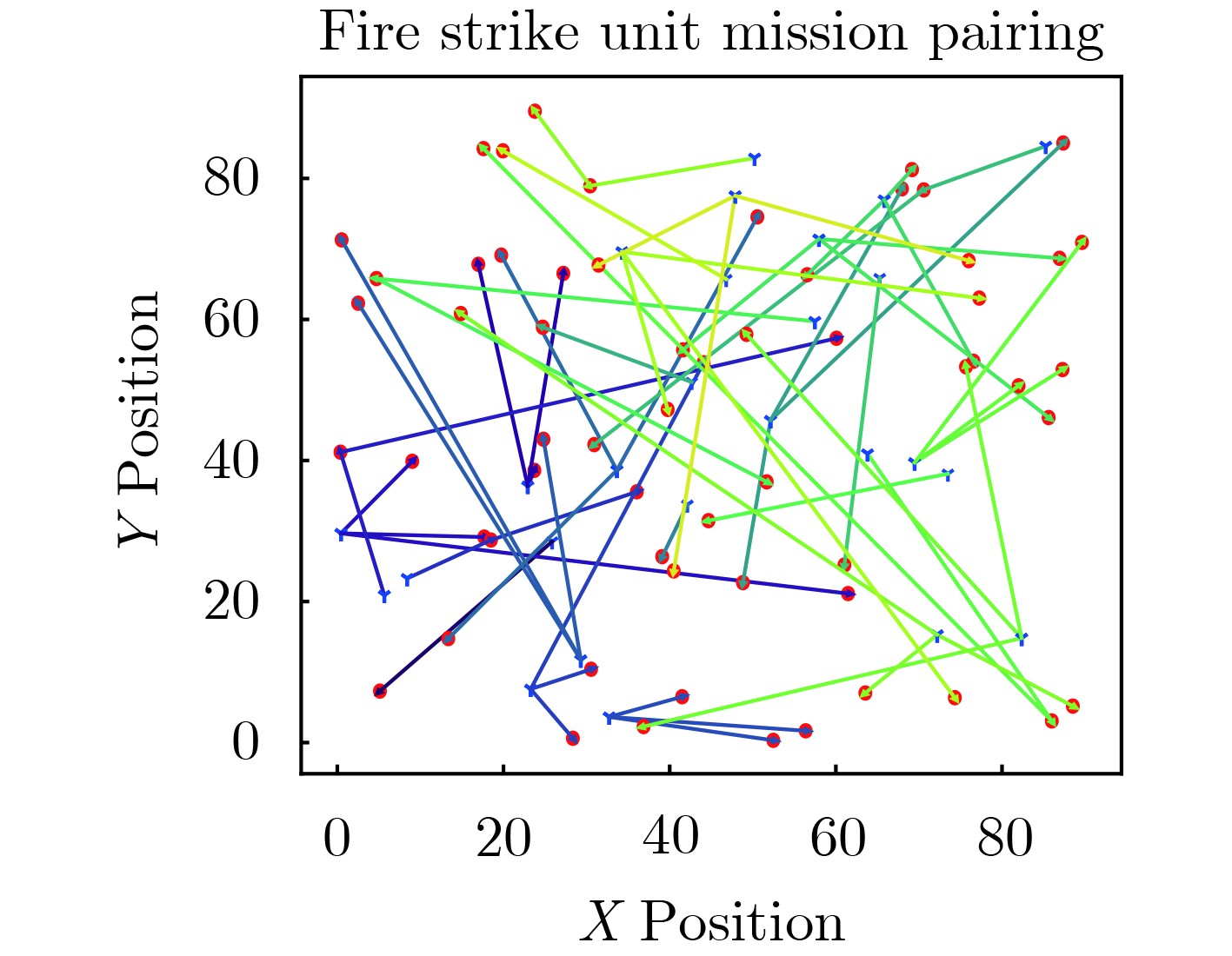
Objective In dynamic and volatile battlefield environments, where the command structure of combat units may be disrupted, combat units must autonomously form appropriate tactical groups in edge operational settings, determine group affiliation, and rapidly allocate tasks. This study proposes a combat unit aggregation and planning method based on an adaptive clustering contract network, addressing the real-time limitations of traditional centralized optimization algorithms. The proposed method enables collaborative decision-making for autonomous group formation and supports multi-task optimization and allocation under dynamic battlefield conditions. Methods (1) An adaptive combat group division algorithm based on the second-order relative change rate is proposed. The optimal number of groups is determined using the Sum of Squared Errors (SSE) indicator, and spatial clustering of combat units is performed via an improved K-means algorithm. (2) A dual-layer contract network architecture is designed. In the first layer, combat groups participate in bidding by computing the net effectiveness of tasks, incorporating attributes such as attack, defense, and value. In the second layer, individual combat units conduct bidding with a load balancing factor to optimize task selection. (3) Mechanisms for task redistribution and exchange are introduced, improving global utility through a secondary bidding process that reallocates unassigned tasks and replaces those with negative effectiveness. Results and Discussions (1) The adaptive combat group division algorithm demonstrates enhanced situational awareness (Algorithm 1). Through dynamic clustering analysis, it accurately captures the spatial aggregation of combat units ( Fig. 6 andFig. 9 ), showing greater adaptability to environmental variability than conventional fixed-group models. (2) The multi-layer contract network architecture exhibits marked advantages in complex task allocation. The group-level pre-screening mechanism significantly reduces computational overhead, while the unit-level negotiation process improves resource utilization by incorporating load balancing. (3) The dynamic task optimization mechanism enables continuous refinement of the allocation scheme. It resolves unassigned tasks and enhances overall system effectiveness through intelligent task exchanges. Comparative experiments confirm that the proposed framework outperforms traditional approaches in task coverage and resource utilization efficiency (Table 4 andTable 5 ), supporting its robustness in dynamic battlefield conditions.Conclusions This study integrates clustering analysis with contract network protocols to establish an intelligent task allocation framework suited to dynamic battlefield conditions. By implementing dual-layer optimization in combat group division and task assignment, the approach improves combat resource utilization and shortens the kill chain. Future research will focus on validating the framework in multi-domain collaborative combat scenarios, refining bidding strategies informed by combat knowledge, and advancing command and control technologies toward autonomous coordination. -
Key words:
- Command and control /
- Contract network /
- Task assignment /
- Firepower planning /
- Combat group clustering
-
1 作战单元自适应K-Means聚类
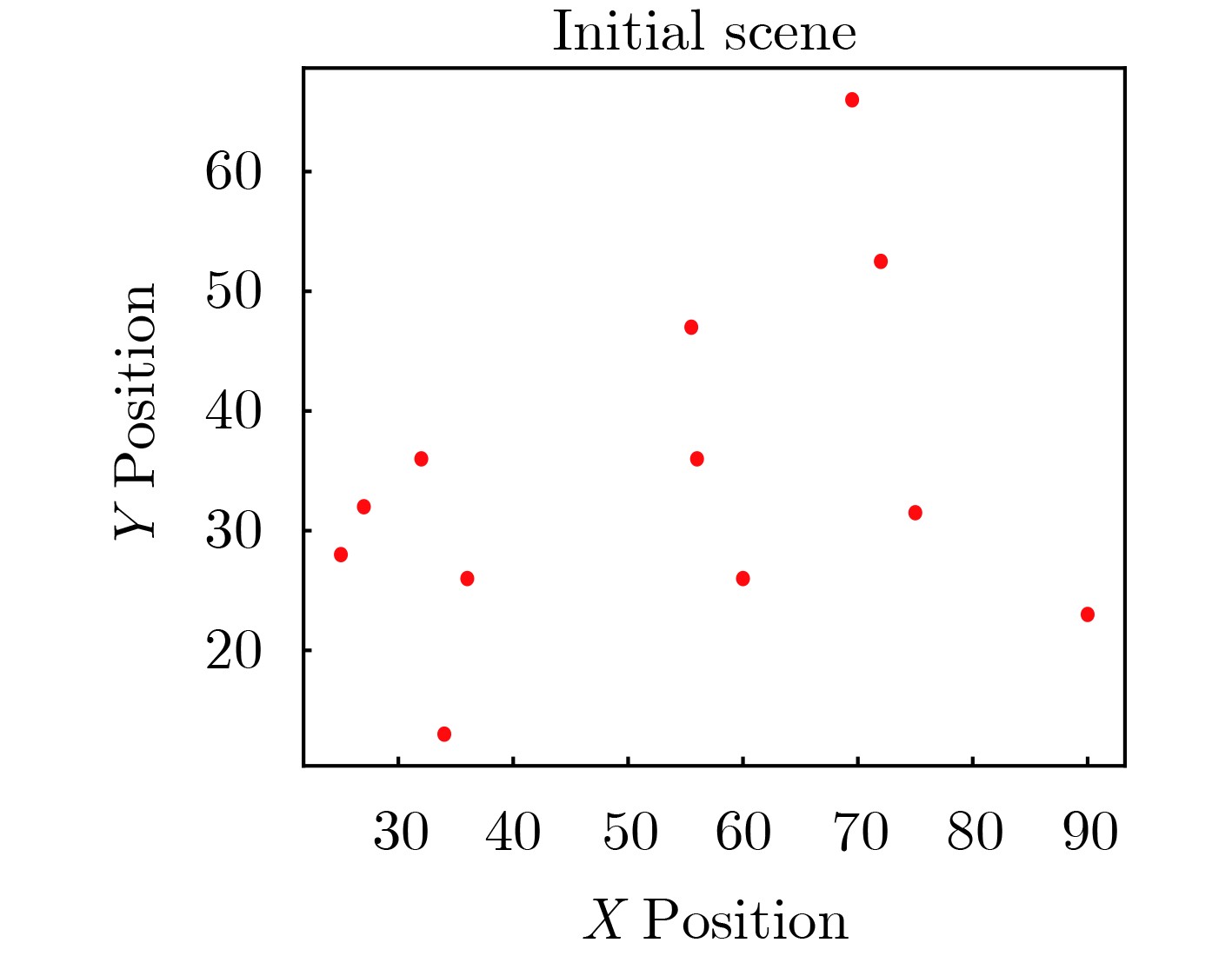
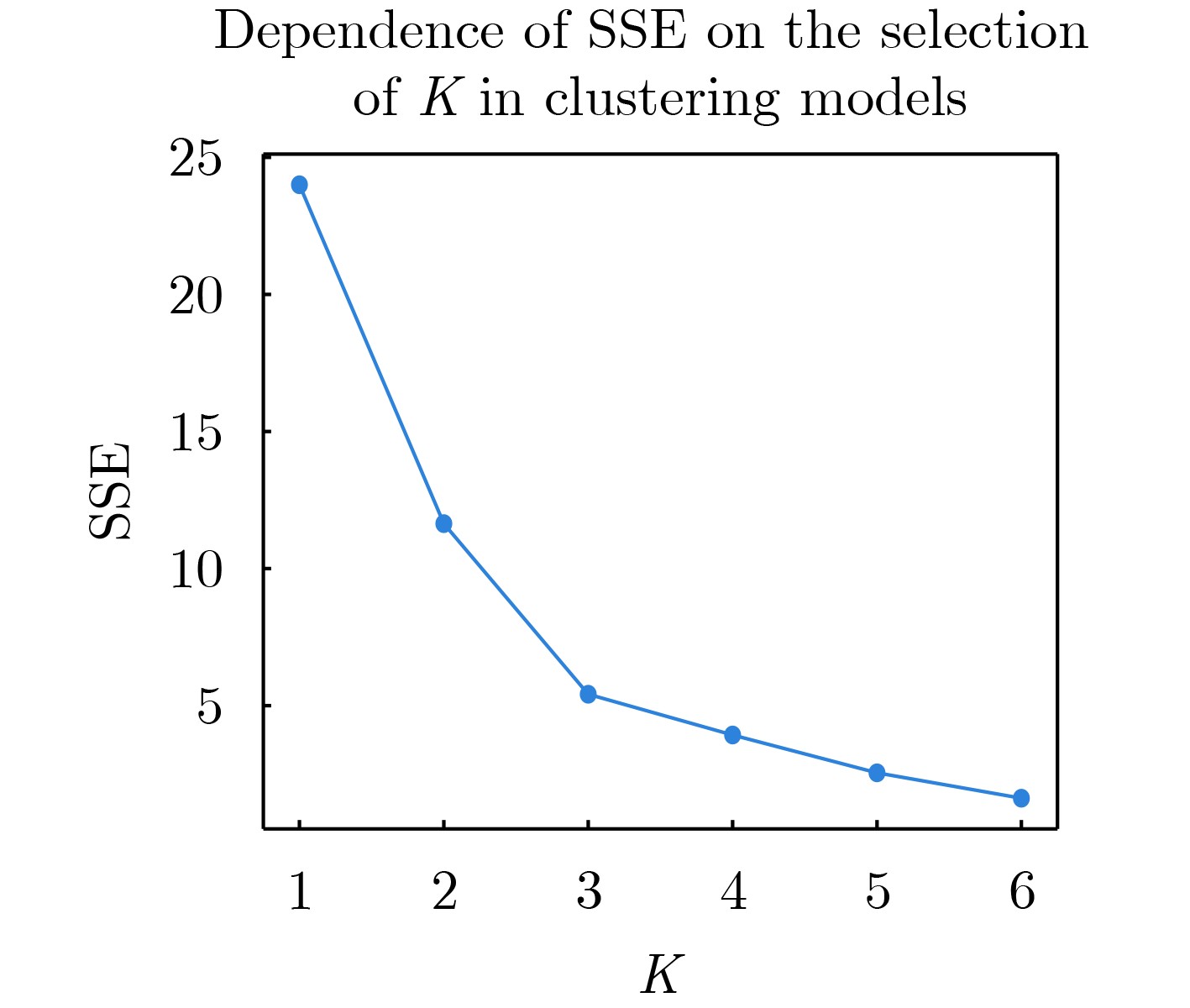
输入:作战单元位置、作战群取值集合。 输出:作战单元适宜聚合的作战群数以及作战单元作战群归属。 (1) 对作战单元位置数据进行$ \min {\text{-}} \max $标准化。 (2) 从设定的作战群数$ K = \left\{ {{K_1},{K_2}, \cdots ,{K_n}} \right\} $中轮流取值,计算
并记录K-Means模型的$ {{\mathrm{SSE}}} ({K_j}) $。(3) 由式(2)计算$ {{\mathrm{SSE}}} $指标的一阶相对变化率$ {{\mathrm{SSE}}} '({K_j}) $。 (4) 由式(3)计算$ {{\mathrm{SSE}}} $指标的2阶相对变化率$ {{\mathrm{SSE}}} ''({K_j}) $。 (5) 选取最优$ K $值令$ {{\mathrm{SSE}}} ''({K_j}){\text{ = }}\max ({{\mathrm{SSE}}} '') $,作为连级作战
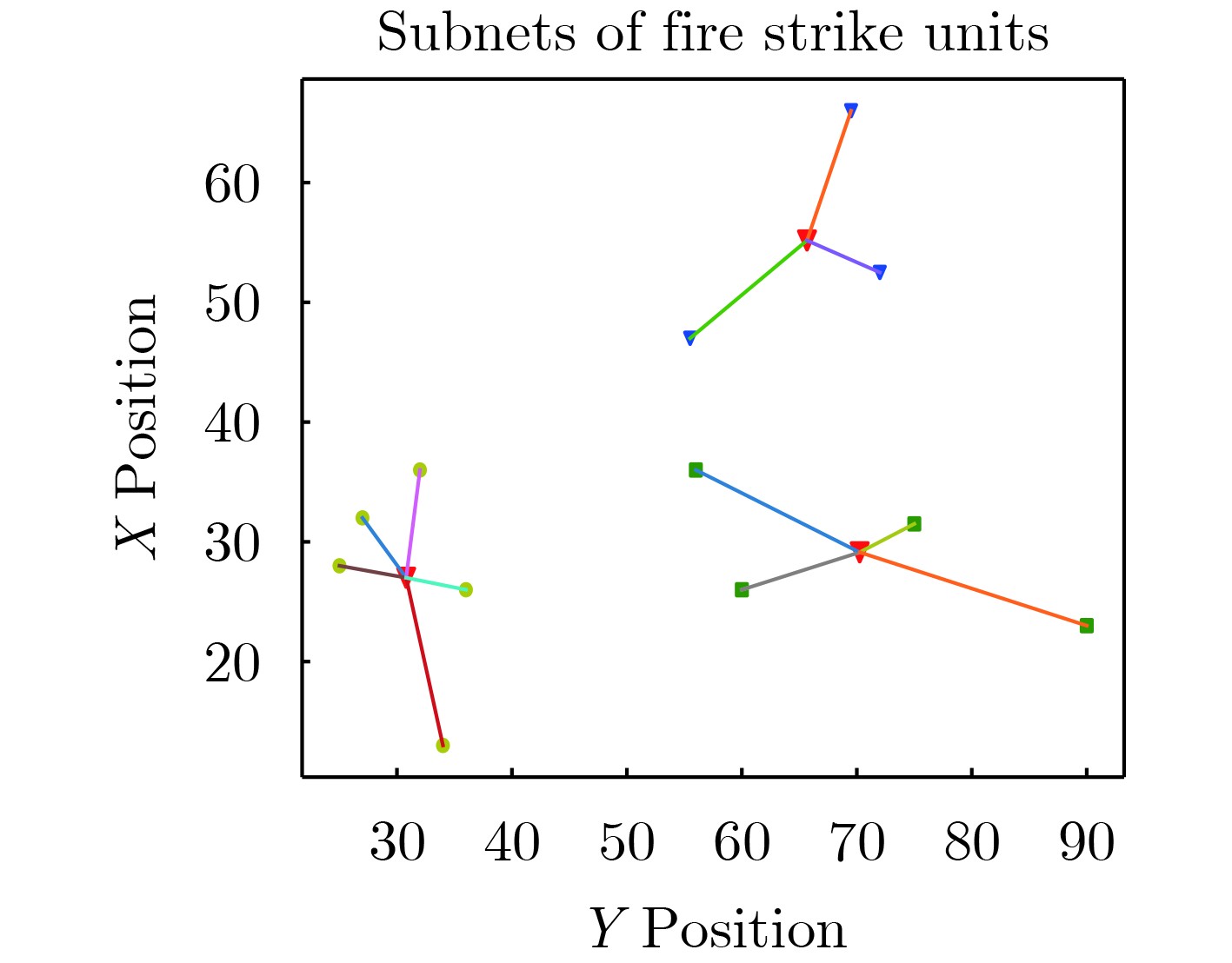
群数量。(6) 初始化聚类中心。 (7) 对于每个作战单元计算其与各个作战群中心的距离,并将其
分配到距离值最小的作战群中。(8) 根据新划分的作战群得到新的作战群中心。 (9) 重复步骤(7)和步骤(8),直到作战群中心不再变化。 (10) 输出最优划分作战群数以及各作战单元的作战群归属。  下载: 导出CSV
下载: 导出CSV
表 1 作战单元属性
编号 初始位置 价值 攻击 防御 抗毁伤 1 (27.0, 32.0) 80 90 55 10 2 (69.5, 66.0) 65 80 55 35 3 (55.5, 47.0) 40 57 26 46 4 (34.0, 13.0) 82 60 68 50 5 (72.0, 52.5) 40 95 70 70 6 (25.0, 28.0) 30 90 80 15 7 (32 0, 36.0) 50 72 85 20 8 (60.0, 26.0) 50 93 28 60 9 (75.0, 31.5) 25 30 15 60 10 (36.0, 26.0) 95 90 30 21 11 (56.0, 26.0) 95 25 48 30 12 (90.0, 23.0) 50 18 7 60
下载: 导出CSV
表 2 任务属性
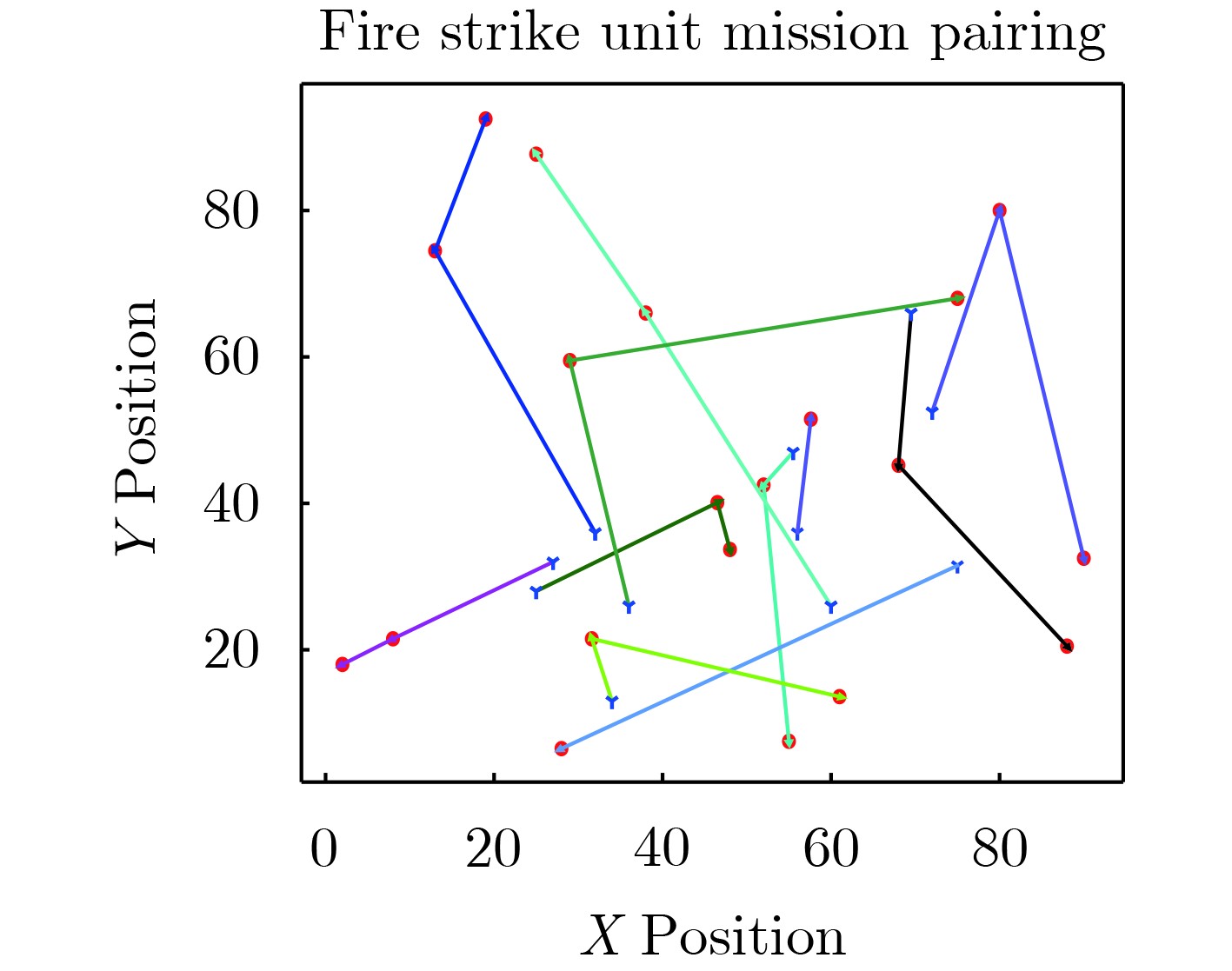
编号 时间消耗 初始位置 价值 攻击 防御 优先级 1 35.0 (80.0, 80.0) 80 70 70 10 2 30.0 (46.5, 40.1) 70 75 40 9 3 23.0 (8.0, 21.5) 47 45 30 6 4 30.0 (13.0, 74.5) 45 42 27 5 5 35.3 (29.0, 59.5) 40 38 32 5 6 15.0 (31.6, 21.5) 35 35 24 4 7 32.4 (90.0, 32.5) 75 70 35 9 8 15.0 (88.0, 20.5) 15 15 19 2 9 42.0 (75.0, 68.0) 95 90 80 10 10 23.5 (68.0, 45.2) 60 65 30 8 11 26.0 (19.0, 92.5) 62 58 34 7 12 20.9 (25.0, 87.7) 59 80 45 7 13 18.7 (2.0, 18.0) 53 50 20 6 14 5.0 (48.0, 33.7) 29 30 20 4 15 8.0 (52.0, 42.5) 25 25 17 3 16 12.0 (38.0, 66.0) 18 20 20 3 17 28.2 (61.0, 13.6) 68 67 25 8 18 9.7 (57.6, 51.5) 18 21 16 2 19 7.5 (55.0, 7.5) 26 8 10 1 20 3.0 (28.0, 6.5) 5 5 4 1
下载: 导出CSV
表 3 连级作战单位中各个作战单元任务匹配情况
作战单位 作战单元 任务序列 优先级 列表任务收益 净收益值 连级作战单位1 2 10,8 8,2 156,9 165 3 15,19 3,1 25, –9 16 5 1,7 10,9 109,183 292 连级作战单位2 1 3,13 6,6 128,168 296 4 6,17 4,8 40,90 130 6 2,14 9,4 244,42 286 7 4,11 5,7 33,94 127 10 5,9 5,10 39,131 170 连级作战单位3 8 16,12 3,7 188,485 673 9 20 1 –15 –15 11 18 2 –6 –6 12 / / / /
下载: 导出CSV
表 4 3种方法下6次实验的任务效能
实验序号 1 2 3 4 5 6 随机任务分配 64 392 –76 –57 158 –81 单层合同网 1632 1408 1587 1714 1981 1847 本研究方法 2134 2061 2335 1924 2730 1916
下载: 导出CSV
表 5 3种方法下6次实验的任务效能
实验序号 1 2 3 4 5 6 随机任务分配 2259 5939 2743 3503 1306 11046 单层合同网 8579 7458 6948 8710 6300 6319 本研究方法 14459 12949 12203 14270 10367 14538
下载: 导出CSV
-
[1] 张维明, 朱承, 黄松平, 等. 指挥与控制原理[M]. 北京: 电子工业出版社, 2021: 101–136.ZHANG Weiming, ZHU Cheng, HUANG Songping, et al. Principles of Command and Control[M]. Beijing: Publishing House of Electronics Industry, 2021: 101–136. [2] 阳东升, 卢经纬, 李强, 等. 超大预训练模型在指挥控制领域的应用与挑战[J]. 指挥与控制学报, 2023, 9(2): 146–155. doi: 10.3969/j.issn.2096-0204.2023.02.0146.YANG Dongsheng, LU Jingwei, LI Qiang, et al. Issues and challenges of ChatGPT-like large scale pre-trained model for command and control[J]. Journal of Command and Control, 2023, 9(2): 146–155. doi: 10.3969/j.issn.2096-0204.2023.02.0146. [3] 彭莉莎, 黄孝鹏, 郑华利, 等. 军事指挥控制智能化发展与建议[J]. 系统科学学报, 2023, 31(3): 35–42.PENG Lisha, HUANG Xiaopeng, ZHENG Huali, et al. Intelligent development and suggestions of military command and control[J]. Journal of Systems Science, 2023, 31(3): 35–42. [4] 杨春辉, 陈洪辉, 罗雪山. 基于信息流的C2组织结构仿真评价研究[J]. 系统工程与电子技术, 2007, 29(4): 574–578. doi: 10.3321/j.issn:1001-506X.2007.04.019.YANG Chunhui, CHEN Honghui, and LUO Xueshan. Evaluating the C2 organization structure based on information flows[J]. Systems Engineering and Electronics, 2007, 29(4): 574–578. doi: 10.3321/j.issn:1001-506X.2007.04.019. [5] 方峰, 费爱国, 贺嘉璠, 等. 未来智能空战指挥控制关键技术发展思考[J]. 指挥信息系统与技术, 2024, 15(3): 10–18. doi: 10.15908/j.cnki.cist.2024.03.002.FANG Feng, FEI Aiguo, HE Jiafan, et al. Development and consideration of key technologies for intelligent air combat command and control in future[J]. Command Information System and Technology, 2024, 15(3): 10–18. doi: 10.15908/j.cnki.cist.2024.03.002. [6] 叶海军, 马亚辉. 美军打击链分析及其启示研究[J]. 中国电子科学研究院学报, 2021, 16(3): 227–231. doi: 10.3969/j.issn.1673-5692.2021.03.003.YE Haijun and MA Yahui. The research of analysis and enlightenment US military kill chain[J]. Journal of China Academy of Electronics and Information Technology, 2021, 16(3): 227–231. doi: 10.3969/j.issn.1673-5692.2021.03.003. [7] 周翔翔, 姚佩阳, 张杰勇, 等. 任务分配方法及其在指挥控制领域的应用[J]. 火力与指挥控制, 2012, 37(12): 87–91. doi: 10.3969/j.issn.1002-0640.2012.12.023.ZHOU Xiangxiang, YAO Peiyang, ZHANG Jieyong, et al. Survey of task allocation and analysis of the methods’ application in command and control domain[J]. Fire Control & Command Control, 2012, 37(12): 87–191. doi: 10.3969/j.issn.1002-0640.2012.12.023. [8] 杨杰, 席建祥, 王成, 等. 多无人机协同巡视任务规划方法综述[J]. 飞行力学, 2018, 36(5): 1–6. doi: 10.13645/j.cnki.f.d.20180820.001.YANG Jie, XI Jianxiang, WANG Cheng, et al. Summary of multi-UAV cooperative patrol task planning methods[J]. Flight Dynamics, 2018, 36(5): 1–6. doi: 10.13645/j.cnki.f.d.20180820.001. [9] 林萌龙, 陈涛, 任棒棒, 等. 基于多智能体深度强化学习的体系任务分配方法[J]. 指挥与控制学报, 2023, 9(1): 93–102. doi: 10.3969/j.issn.2096-0204.2023.01.0093.LIN Menglong, CHEN Tao, REN Bangbang, et al. Task assignment method of operation system of systems based on multi-agent deep reinforcement learning[J]. Journal of Command and Control, 2023, 9(1): 93–102. doi: 10.3969/j.issn.2096-0204.2023.01.0093. [10] 张维明, 黄松平, 朱承, 等. 指挥控制的新范式: 边缘指挥控制[J]. 指挥信息系统与技术, 2021, 12(1): 1–7. doi: 10.15908/j.cnki.cist.2021.01.001.ZHANG Weiming, HUNAG Songping, ZHU Cheng, et al. New paradigm of command and control: Edge command and control[J]. Command Information System and Technology, 2021, 12(1): 1–7. doi: 10.15908/j.cnki.cist.2021.01.001. [11] 史秉政. 基于分布式网络化指控体系的协同跟踪设计[J]. 指挥控制与仿真, 2016, 38(3): 102–107. doi: 10.3969/j.issn.1673-3819.2016.03.020.SHI Bingzheng. Cooperative track procedure design based on distributed network command & control system[J]. Command Control & Simulation, 2016, 38(3): 102–107. doi: 10.3969/j.issn.1673-3819.2016.03.020. [12] 丁泽柳. 一种分布式指挥控制系统效能评估方法[J]. 指挥控制与仿真, 2022, 44(2): 71–77. doi: 10.3969/j.issn.1673-3819.2022.02.014.DING Zeliu. An effectiveness evaluation method for the distributed command and control system[J]. Command Control & Simulation, 2022, 44(2): 71–77. doi: 10.3969/j.issn.1673-3819.2022.02.014. [13] 宋志华, 张晗. 多车多波次导弹火力打击行动规划问题的网络流模型及动态规划求解[J]. 军事运筹与系统工程, 2017, 31(3): 15–19. doi: 10.3969/j.issn.1672-8211.2017.03.003.SONG Zhihua and ZHANG Han. Network flow model and dynamic programming solution for multi-vehicle and multi-wave missile fire strike operation planning problem[J]. Military Operations Research and Systems Engineering, 2017, 31(3): 15–19. doi: 10.3969/j.issn.1672-8211.2017.03.003. [14] 徐国训, 梁晓龙, 张佳强, 等. 航空集群多目标群攻击路径规划仿真研究[J]. 计算机仿真, 2017, 34(6): 66–70,324. doi: 10.3969/j.issn.1006-9348.2017.06.014.XU Guoxun, LIANG Xiaolong, ZHANG Jiaqiang, et al. Simulation research on path planning of aircraft swarms attacking multi-target group[J]. Computer Simulation, 2017, 34(6): 66–70,324. doi: 10.3969/j.issn.1006-9348.2017.06.014. [15] 龙国庆, 祝小平, 周洲. 多无人机系统协同多任务分配模型与仿真[J]. 飞行力学, 2011, 29(4): 68–71,76. doi: 10.13645/j.cnki.f.d.2011.04.019.LONG Guoqing, ZHU Xiaoping, and ZHOU Zhou. Model and simulation of cooperative multi-task assignment for multi-UAV system[J]. Flight Dynamics, 2011, 29(4): 68–71,76. doi: 10.13645/j.cnki.f.d.2011.04.019. [16] ZHU Ruiqi and ZHAI Yunkai. Research on the application of VRP theory in logistics transportation[J]. MATEC Web of Conferences, 2017, 100: 05064. doi: 10.1051/matecconf/201710005064. [17] CHEN Yuxiao, ROSOLIA U, and AMES A D. Decentralized task and path planning for multi-robot systems[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4337–4344. doi: 10.1109/LRA.2021.3068103. [18] 梁国伟, 王社伟, 赵雪森. 多无人机协同任务分配方法[J]. 火力与指挥控制, 2014, 39(11): 13–17. doi: 10.3969/j.issn.1002-0640.2014.11.004.LIANG Guowei, WANG Shewei, and ZHAO Xuesen. Method research on cooperative task allocation for multiple UCAVs[J]. Fire Control & Command Control, 2014, 39(11): 13–17. doi: 10.3969/j.issn.1002-0640.2014.11.004. [19] 吕遐东, 郑爽, 陈杰. 基于改进遗传算法的舰艇编队联合防空资源预规划方法[J]. 中国舰船研究, 2023, 18(3): 266–276. doi: 10.19693/j.issn.1673-3185.02877.LYU Xiadong, ZHENG Shuang, and CHEN Jie. Pre-planning method of joint air defense resources for ship formations based on improved genetic algorithm[J]. Chinese Journal of Ship Research, 2023, 18(3): 266–276. doi: 10.19693/j.issn.1673-3185.02877. [20] 彭鹏菲, 龚雪, 姜俊, 等. 基于改进多维粒子群的多无人机任务分配方法[J]. 兵器装备工程学报, 2023, 44(7): 227–236. doi: 10.11809/bqzbgcxb2023.07.030.PENG Pengfei, GONG Xue, JIANG Jun, et al. An improved multi-dimensional particle swarm-based approach to multi-UAV mission assignment[J]. Journal of Ordnance Equipment Engineering, 2023, 44(7): 227–236. doi: 10.11809/bqzbgcxb2023.07.030. [21] 吴克宇, 冯旸赫, 黄金才, 等. 面向随机并发任务的杀伤网建模与最优控制方法[J]. 指挥与控制学报, 2023, 9(4): 487–494. doi: 10.3969/j.issn.2096-0204.2023.04.0487.WU Keyu, FENG Yanghe, HUANG Jincai, et al. Modeling and optimal control of a kill web for stochastic-oriented concurrent tasks[J]. Journal of Command and Control, 2023, 9(4): 487–494. doi: 10.3969/j.issn.2096-0204.2023.04.0487. [22] 张传昊, 李豪杰, 于航, 等. 基于合同网的巡飞弹任务分配算法及模型[J]. 探测与控制学报, 2023, 45(1): 84–90.ZHANG Chuanhao, LI Haojie, YU Hang, et al. Task assignment algorithm for cruising munition based on contract net[J]. Journal of Detection & Control, 2023, 45(1): 84–90. [23] 姜月秋, 宗睿, 关启学, 等. 基于多约束投标策略的改进合同网算法[J]. 兵器装备工程学报, 2022, 43(1): 206–211. doi: 10.11809/bqzbgcxb2022.01.032.JIANG Yueqiu, ZONG Rui, GUAN Qixue, et al. An improved contract net protocol based on multi-constraint bidding strategy[J]. Journal of Ordnance Equipment Engineering, 2022, 43(1): 206–221. doi: 10.11809/bqzbgcxb2022.01.032. [24] 李智, 孙怡峰, 吴疆, 等. 基于战车和夺控点分配的智能体步兵投送策略决策方法[J]. 指挥与控制学报, 2024, 10(4): 432–442. doi: 10.3969/j.issn.2096-0204.2024.04.0432.LI Zhi, SUN Yifeng, WU Jiang, et al. Decision-making for agent infantry projection strategy based on the assignment of fighting vehicles and capture points[J]. Journal of Command and Control, 2024, 10(4): 432–442. doi: 10.3969/j.issn.2096-0204.2024.04.0432. [25] 翟政, 何明, 徐鹏, 等. 基于市场机制的无人集群任务分配研究综述[J]. 计算机应用研究, 2023, 40(7): 1921–1928. doi: 10.19734/j.issn.1001-3695.2022.10.0633.ZHAI Zheng, HE Ming, XU Peng, et al. Research review of task allocation for unmanned swarm based on market mechanism[J]. Application Research of Computers, 2023, 40(7): 1921–1928. doi: 10.19734/j.issn.1001-3695.2022.10.0633. [26] 赵飞扬, 陈洪超, 康林, 等. 基于改进合同网的分布式协同目标分配[J]. 兵工自动化, 2023, 42(3): 26–30. doi: 10.7690/bgzdh.2023.03.006.ZHAO Feiyang, CHEN Hongchao, KANG Lin, et al. Distributed collaborative target assignment based on improved contract net[J]. Ordnance Industry Automation, 2023, 42(3): 26–30. doi: 10.7690/bgzdh.2023.03.006. [27] 张梦颖, 王蒙一, 王晓东, 等. 基于改进合同网的无人机群协同实时任务分配问题研究[J]. 航空兵器, 2019, 26(4): 38–46. doi: 10.12132/ISSN.1673-5048.2019.0153.ZHANG Mengying, WANG Mengyi, WANG Xiaodong, et al. Cooperative real-time task assignment of UAV group based on improved contract net[J]. Aero Weaponry, 2019, 26(4): 38–46. doi: 10.12132/ISSN.1673-5048.2019.0153. -


 下载:
下载:




图(10) / 表(6)
计量
- 文章访问数: 1050
- HTML全文浏览量: 604
- PDF下载量: 91
- 被引次数: 0
