

Research on Unmanned Aircraft Radio Frequency Signal Recognition Algorithm Based on Wavelet Entropy Features
-
摘要: 随着无人机技术的迅猛发展及其在多个领域的广泛应用,确保无人机的安全飞行和有效监管成为了一个重要的研究课题。该文提出一种基于小波熵特征和优化神经网络的无人机飞控射频信号分类识别方法,旨在解决复杂电磁环境中无人机信号识别的问题。通过提取射频信号的小波熵特征并构建特征向量,结合由大蔗鼠优化算法(GCRA)优化的支持向量机(SVM)分类器,实现了对不同型号无人机的有效分类。实验使用了公开数据集DroneRFa中的常见无人机射频信号,经过10-折交叉验证测试,该方法对于6种型号的无人机分类准确率达到了97%以上,最高可达99%,证明了所提方法的有效性和可靠性。该研究为无人机自主避障、路径规划以及多机协同作业提供了重要的技术支持。Abstract:
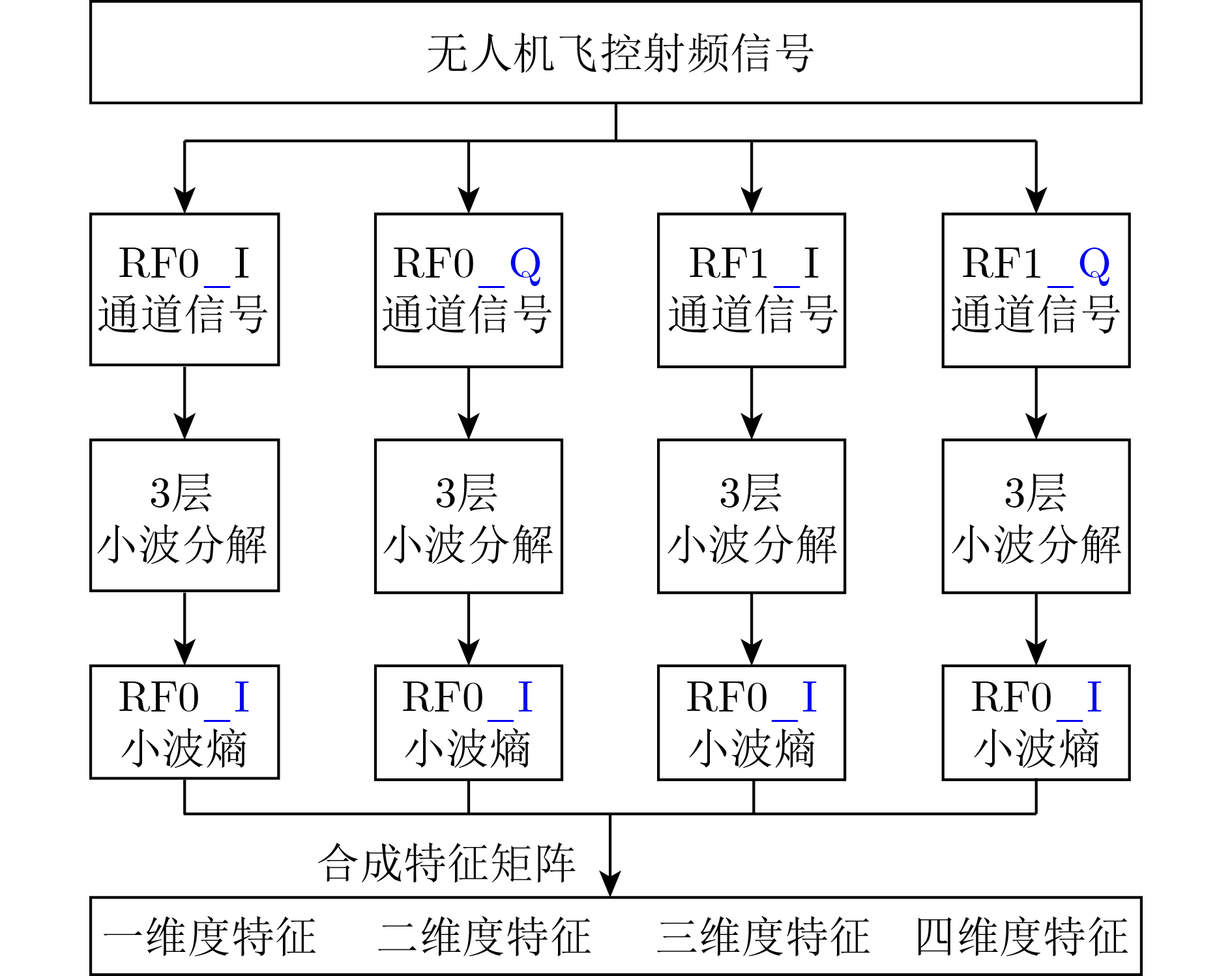
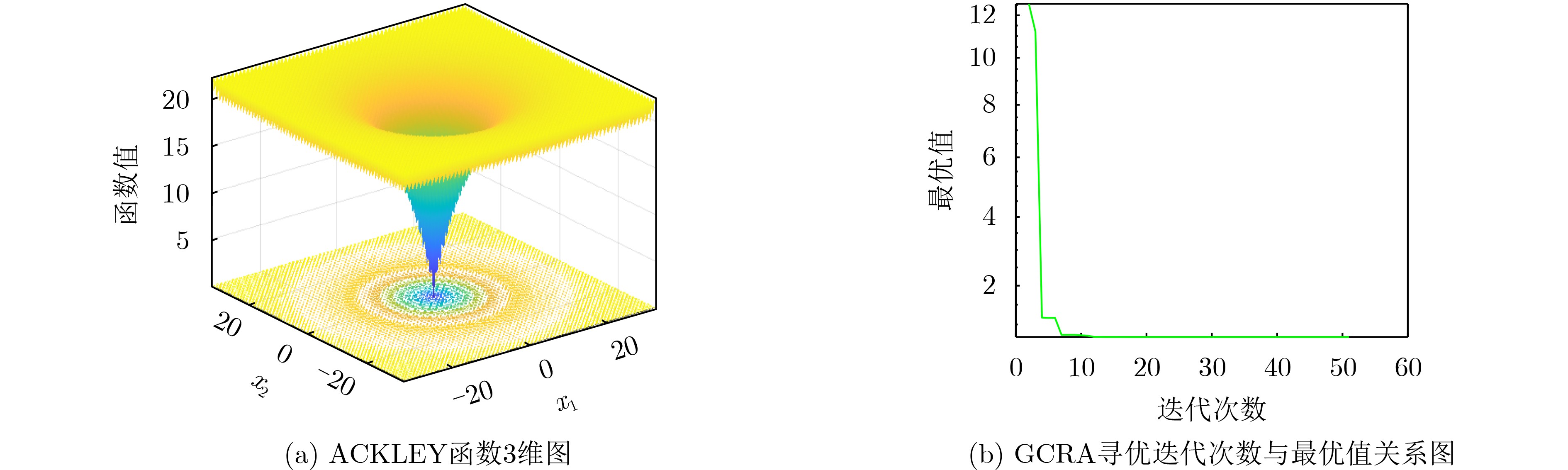
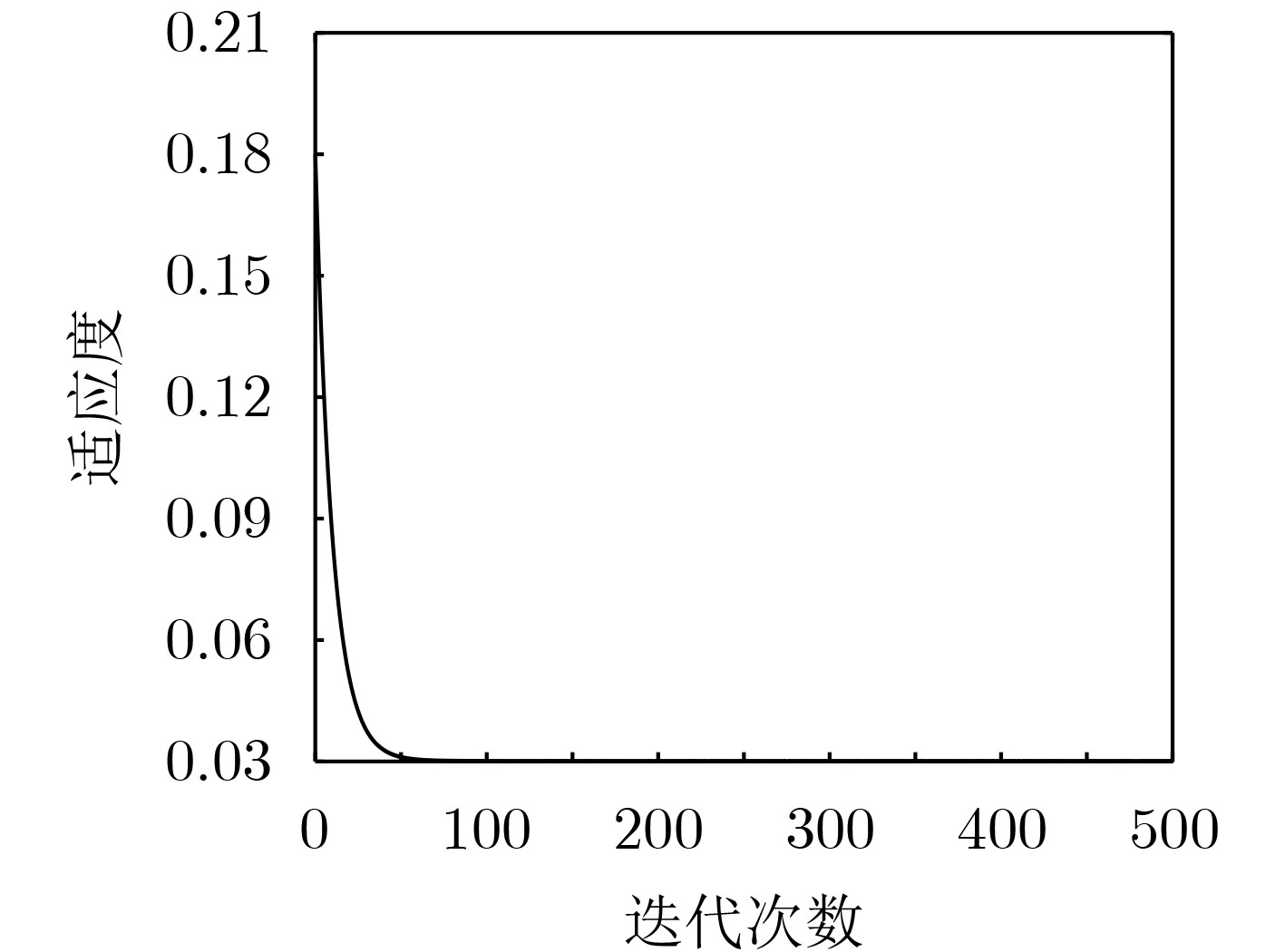
Objective With the rapid development and broad application of Unmanned Aerial Vehicle (UAV) technology, its use in military reconnaissance, agricultural spraying, logistics, and film production presents growing challenges in signal classification and safety supervision. Accurate classification of UAV Radio Frequency (RF) signals in complex electromagnetic environments is critical for real-time flight monitoring, autonomous obstacle avoidance, and communication reliability in multi-agent coordination. However, conventional recognition methods exhibit limitations in both feature extraction and classification accuracy, particularly under interference or multipath propagation, which severely reduces recognition performance and constrains practical implementation. To address this limitation, this study proposes a recognition algorithm based on wavelet entropy features and an optimized Support Vector Machine (SVM). The method enhances classification accuracy and robustness by extracting wavelet entropy features from UAV RF signals and optimizing SVM parameters using the Great Cane Rat Optimization Algorithm (GCRA). The proposed approach offers a reliable strategy for UAV signal identification under complex electromagnetic conditions. The results contribute to UAV airspace regulation and unauthorized flight detection and establish a foundation for future applications, including autonomous navigation and intelligent route planning. This work holds both theoretical value and practical relevance for supporting the secure and standardized advancement of UAV systems. Methods This study adopts a systematic approach to achieve accurate classification and recognition of UAV RF signals, including four key stages: data acquisition, feature extraction, classifier design, and performance verification. First, the publicly available DroneRFa dataset is selected as the experimental dataset. It contains RF signals from 24 mainstream UAV models (e.g., DJI Phantom 3, DJI Inspire 2) across three ISM frequency bands—915 MHz, 2.4 GHz, and 5.8 GHz ( Fig. 1 ). Data collection follows a “pick-store-pick-store” protocol to preserve signal integrity and ensure accurate classification. During preprocessing, 50,000 sampling points are extracted from each channel (RF0_I, RF0_Q, RF1_I, RF1_Q), balancing data continuity and feature representativeness under hardware read/write constraints. Signal magnitudes are normalized to eliminate amplitude-related bias. For feature extraction, a three-level wavelet transform using the Daubechies “db4” wavelet is applied to decompose the signal at multiple scales. A four-dimensional feature matrix is constructed by computing wavelet spectral entropy (Figs. 2 and3 ), which captures both time-frequency characteristics and energy distribution. Feature differences among UAV models are confirmed by F-test analysis (Table 1 ), establishing a robust foundation for classification. In the classifier design stage, the GCRA is applied to optimize the penalty parameter C and Gaussian kernel parameter σ of the SVM. The classification error rate serves as the fitness function during optimization (Fig. 5 ). Inspired by the foraging behavior of cane rats, GCRA offers improved global search performance. Finally, algorithm performance is evaluated using 10-fold cross-validation and benchmarked against unoptimized SVM, PSO-SVM, GA-SVM, and GWO-SVM (Table 3), demonstrating the robustness and reliability of the proposed method.Results and Discussions This study yields several key findings. For wavelet entropy feature extraction, the F-test confirms that features from all four channels are statistically significant (p < 0.05), demonstrating their effectiveness in distinguishing among UAV models ( Table 1 ). In classifier optimization, the GCRA exhibits strong parameter search capability, with fitness convergence achieved within 50 iterations at approximately 0.03 (Fig. 6 ). The optimized SVM classifier reaches an average recognition accuracy of 98.5%, representing a 6.8 percentage point improvement over the traditional SVM (Table 3 ). At the individual model level, the highest recognition accuracy is observed for DJI Inspire 2 (99.0%), with all other models exceeding 97% (Table 2 ). Confusion matrix analysis indicates that all misclassification rates are below 3% (Table2 ,Fig. 7 ). Notably, under identical experimental conditions, GCRA-SVM outperforms other optimization algorithms—achieving higher accuracy than PSO-SVM (94.7%) and GA-SVM (94.2%)—with lower variance (±0.00032), indicating greater stability (Table 3 ). These results validate the discriminative power of wavelet entropy features and highlight the enhanced performance and robustness of GCRA-based SVM optimization.Conclusions Through systematic theoretical analysis and experimental validation, this study reaches several key conclusions. The wavelet entropy-based feature extraction method effectively captures the time-frequency characteristics of UAV RF signals. By employing multi-scale decomposition and energy distribution analysis, it accurately identifies the unique signal features of various UAV models. Statistical tests confirm significant differences among the features of different UAV categories, providing a solid foundation for feature selection in UAV identification. The optimization of SVM parameters using the GCRA substantially enhances classification performance, achieving an average accuracy of 98.5% and a peak of 99% on the DroneRFa dataset, with excellent stability. This method addresses the technical challenge of UAV RF signal recognition in complex electromagnetic environments, with performance metrics fully meeting practical application needs. The findings offer a reliable technical solution for UAV flight supervision and lay the groundwork for advanced applications such as autonomous obstacle avoidance. Future research may focus on evaluating the method’s performance in high-noise environments and exploring fusion strategies with other models. Overall, this study provides significant contributions both in terms of theoretical innovation and engineering application. -
表 1 F检验结果
特征通道 F检验返回$ p $值 结论 RF0_I $ 1.55 \times {10^{ - 7}} $ 拒绝原假设,接受备择假设 RF0_Q $ 1.16 \times {10^{ - 7}} $ 拒绝原假设,接受备择假设 RF1_I $ 1.94 \times {10^{ - 9}} $ 拒绝原假设,接受备择假设 RF1_Q $ 1.04 \times {10^{ - 12}} $ 拒绝原假设,接受备择假设  下载: 导出CSV
下载: 导出CSV
表 2 6种型号无人机飞控射频信号分类准确率
型号 测试正确样本数 识别准确率±方差 DJ Phantom 3 986 98.6%±0.000 13 DJI AVATA 982 98.2%±0.000 21 DJI MATRICE 200 980 98.0%±0.000 42 DJI Air 2S 976 97.6%±0.000 14 DJI Mini 3 Pro 977 97.7%±0.000 46 DJI Inspire2 990 99.0%±0.000 62
下载: 导出CSV
表 3 对照试验结果
模型选择 DJ Phantom 3 DJI AVATA DJI MATRICE 200 DJI Air 2S DJI Mini 3 Pro DJI Inspire 2 平均准确率±方差 SVM 92.3% 91.8% 91.5% 91.1% 91.3% 92.5% 91.7%±0.000 49 PSO-SVM 95.2% 94.8% 94.5% 94.1% 94.3% 95.5% 94.7%±0.000 13 GA-SVM 94.9% 94.4% 94.1% 93.8% 93.9% 95.0% 94.2%±0.000 49 GWO-SVM 96.1% 95.7% 95.3% 95.0% 95.2% 96.5% 95.6%±0.000 72 GCRA-SVM 98.6% 98.2% 98.0% 97.6% 97.7% 99.0% 98.5%±0.000 32
下载: 导出CSV
-
[1] 邱小剑, 骆博雅, 付珍, 等. 国内外反无人机技术发展综述[J]. 战术导弹技术, 2024(5): 63–73,98. doi: 10.16358/j.issn.1009-1300.20240095.QIU Xiaojian, LUO Boya, FU Zhen, et al. An overview on development of domestic and foreign anti-UAV technology[J]. Tactical Missile Technology, 2024(5): 63–73,98. doi: 10.16358/j.issn.1009-1300.20240095. [2] 付鑫, 赵然, 梁延峰, 等. 反无人机蜂群技术发展综述[J]. 中国电子科学研究院学报, 2022, 17(5): 421–428. doi: 10.3969/j.issn.1673-5692.2022.05.003.FU Xin, ZHAO Ran, LIANG Yanfeng, et al. Review on the development of anti UAV bee colony technology[J]. Journal of China Academy of Electronics and Information Technology, 2022, 17(5): 421–428. doi: 10.3969/j.issn.1673-5692.2022.05.003. [3] SHAKHATREH H, SAWALMEH A, HAYAJNEH K F, et al. A systematic review of interference mitigation techniques in current and future UAV-Assisted wireless networks[J]. IEEE Open Journal of the Communications Society, 2024, 5: 2815–2846. doi: 10.1109/OJCOMS.2024.3392623. [4] CHENG Nan, WU Shen, WANG Xiucheng, et al. AI for UAV-Assisted IoT applications: A comprehensive review[J]. IEEE Internet of Things Journal, 2023, 10(16): 14438–14461. doi: 10.1109/JIOT.2023.3268316. [5] SAVKIN A V and HUANG Hailong. A method for optimized deployment of a network of surveillance aerial drones[J]. IEEE Systems Journal, 2019, 13(4): 4474–4477. doi: 10.1109/JSYST.2019.2910080. [6] SHI Zhiguo, CHANG Xianyu, YANG Chaoqun, et al. An acoustic-based surveillance system for amateur drones detection and localization[J]. IEEE Transactions on Vehicular Technology, 2020, 69(3): 2731–2739. doi: 10.1109/TVT.2020.2964110. [7] BERA B, DAS A K, GARG S, et al. Access control protocol for battlefield surveillance in drone-assisted IoT environment[J]. IEEE Internet of Things Journal, 2022, 9(4): 2708–2721. doi: 10.1109/JIOT.2020.3049003. [8] NGUYEN P, TRUONG H, RAVINDRANATHAN M, et al. Matthan: Drone presence detection by identifying physical signatures in the drone's RF communication[C]. The 15th Annual International Conference on Mobile Systems, Applications, and Services, New York, USA, 2017: 211–224. doi: 10.1145/3081333.3081354. [9] DE WIT J J M, HARMANNY R I A, and PRÉMEL-CABIC G. Micro-Doppler analysis of small UAVs[C]. 2012 9th European Radar Conference, Amsterdam, Netherlands, 2012: 210–213. [10] UNLU E, ZENOU E, RIVIERE N, et al. An autonomous drone surveillance and tracking architecture[C]. 2019 Autonomous Vehicles and Machines Conference, San Francisco, USA, 2019: 35. [11] 张瑞鑫, 黎宁, 张夏夏, 等. 基于优化CenterNet的低空无人机检测方法[J]. 北京航空航天大学学报, 2022, 48(11): 2335–2344. doi: 10.13700/j.bh.1001-5965.2021.0108.ZHANG Ruixin, LI Ning, ZHANG Xiaxia, et al. Low-altitude UAV detection method based on optimized CenterNet[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2335–2344. doi: 10.13700/j.bh.1001-5965.2021.0108. [12] 聂伟, 戴琪霏, 杨小龙, 等. 基于多维信号特征的无人机探测识别方法[J]. 电子与信息学报, 2024, 46(3): 1089–1099. doi: 10.11999/JEIT230302.NIE Wei, DAI Qifei, YANG Xiaolong, et al. Unmanned aerial vehicle detection and recognition method based on multi-dimensional signal feature[J]. Journal of Electronics & Information Technology, 2024, 46(3): 1089–1099. doi: 10.11999/JEIT230302. [13] SHANNON C E. A mathematical theory of communication[J]. The Bell System Technical Journal, 1948, 27(3): 379–423. doi: 10.1002/j.1538-7305.1948.tb01338.x. [14] 何正友, 蔡玉梅, 钱清泉. 小波熵理论及其在电力系统故障检测中的应用研究[J]. 中国电机工程学报, 2005, 25(5): 38–43. doi: 10.3321/j.issn:0258-8013.2005.05.007.HE Zhengyou, CAI Yumei, and QIAN Qingquan. A study of wavelet entropy theory and its application in electric power system fault detection[J]. Proceedings of the CSEE, 2005, 25(5): 38–43. doi: 10.3321/j.issn:0258-8013.2005.05.007. [15] BISIO I, GARIBOTTO C, LAVAGETTO F, et al. Blind detection: Advanced techniques for WiFi-based drone surveillance[J]. IEEE Transactions on Vehicular Technology, 2019, 68(1): 938–946. doi: 10.1109/TVT.2018.2884767. [16] XIE Yuelei, JIANG Ping, GU Yi, et al. Dual-source detection and identification system based on UAV radio frequency signal[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 2006215. doi: 10.1109/TIM.2021.3103565. [17] EZUMA M, ERDEN F, ANJINAPPA C K, et al. Detection and classification of UAVs using RF fingerprints in the presence of Wi-Fi and Bluetooth interference[J]. IEEE Open Journal of the Communications Society, 2020, 1: 60–76. doi: 10.1109/OJCOMS.2019.2955889. [18] 俞宁宁, 毛盛健, 周成伟, 等. DroneRFa: 用于侦测低空无人机的大规模无人机射频信号数据集[J]. 电子与信息学报, 2024, 46(4): 1147–1156. doi: 10.11999/JEIT230570.YU Ningning, MAO Shengjian, ZHOU Chengwei, et al. DroneRFa: A large-scale dataset of drone radio frequency signals for detecting low-altitude drones[J]. Journal of Electronics & Information Technology, 2024, 46(4): 1147–1156. doi: 10.11999/JEIT230570. [19] 茆诗松, 程依明, 濮晓龙. 概率论与数理统计教程[M]. 2版. 北京: 高等教育出版社, 2011: 284–375.MAO Shisong, CHENG Yiming, and PU Xiaolong. Probability and Mathematical Statistics[M]. 2nd ed. Beijing: Higher Education Press, 2011: 284–375. [20] AGUSHAKA J O, EZUGWU A E, SAHA A K, et al. Greater cane rat algorithm (GCRA): A nature-inspired metaheuristic for optimization problems[J]. Heliyon, 2024, 10(11): e31629. doi: 10.1016/j.heliyon.2024.e31629. -


 下载:
下载:





图(7) / 表(3)
计量
- 文章访问数: 1586
- HTML全文浏览量: 871
- PDF下载量: 185
- 被引次数: 0
