

3D Reconstruction of Metro Tunnel Based on Path Likelihood Model and HMM Sequence Matching Localization
-
摘要: 在地铁隧道等退化场景下,主流的激光或视觉SLAM算法实用性低,无法有效完成三维重建工作。该文提出一种基于路径似然模型(PLM)与隐马尔可夫(HMM)序列匹配的大规模地铁隧道三维重建方法,将三维重建问题分解为里程计定位与基于图优化的高精度三维重建两个过程。针对里程计定位,该文提出一种融合路径似然模型的里程计方法。在粒子滤波框架下,将轨道约束转化为观测,并与IMU和轮速计数据融合,实现在轨机器人定位。此外,还提出一种基于HMM序列匹配的回环检测方法,将回环检测问题转化为序列匹配问题,提升回环检测的性能。针对重建问题,提出一种基于大规模因子图优化的三维重建方法,通过多约束条件完成位姿图优化,从而实现大规模地铁隧道的高精度三维重建。在成都韦家碾-双水碾和沙河源-洞子口两段地铁站之间进行了实地测试。实验结果表明,该文提出的PLM和HMM序列匹配可以有效提升里程计定位精度和回环检测性能,从而实现大规模地铁隧道场景的高精度三维重建。Abstract:
Objective As the operational mileage of metro systems in China continues to increase, the inspection and maintenance of metro tunnels have become more critical. Accurate 3D reconstruction of metro tunnels is essential for construction, inspection, and maintenance. However, in severely degraded tunnel environments, existing SLAM algorithms based on laser or vision often struggle to construct maps and face limitations in complex scenarios. To address this challenge, this paper proposes a method for large-scale 3D reconstruction of metro tunnels by utilizing the matching of the Path Likelihood Model (PLM) and the Hidden Markov Model (HMM). The 3D reconstruction task is divided into two key processes: odometer positioning and high-precision 3D reconstruction via graph optimization. High-precision 3D reconstruction is achieved by effectively addressing both components. Methods For odometer-based localization, this paper presents a method that incorporates the PLM. The PLM is developed using kernel density estimation to analyze the vehicle’s track path, effectively representing the vehicle’s positional information as a probability distribution. Within the framework of a particle filter, this method converts the constructed PLM into position observations of the vehicle. Additionally, data from the onboard Inertial Measurement Unit (IMU) and the wheel speed sensor are integrated to enhance localization accuracy. To minimize cumulative errors in odometer-based localization, this paper reformulates the problem of loop closure detection as a sequence matching problem using the Viterbi algorithm within the framework of the HMM. This method effectively addresses the instability associated with single-frame matching in loop closure detection and significantly improves the overall performance. To resolve the reconstruction problem, this paper presents a method for 3D reconstruction using large-scale factor graph optimization. By optimizing the pose graph with multiple constraints, it enables high-precision 3D reconstruction of extensive metro tunnels. Results and Discussions The proposed method and model are tested and validated at the WeiJianian-ShuangShuianian and ShaHeyuan-DongZikou metro stations in Chengdu. The experimental results are as follows: the effectiveness of the proposed method is confirmed through two sets of ablation experiments, DR and DR+PATH. Furthermore, by comparing the results with those of two notable open-source LIDAR algorithms, LIO-SAM and Faster-LIO, the superiority of this method is demonstrated. The reconstruction accuracy achieved is high, and the reconstruction error remains consistent even as the running distance increases. Therefore, the method is suitable for application in real operational processes. Conclusions This paper addresses the challenges of 3D reconstruction in metro tunnels by proposing a novel algorithm that combines the PLM with HMM sequence matching. The PLM is developed using drawing information, which serves as the foundation for the reconstruction process. Within the framework of particle filtering, the likelihood model is used to correct errors from the IMU and wheel speed sensor. This results in accurate odometer readings for the onboard robot. Furthermore, the issue of loop matching is reformulated as an HMM sequence matching problem. By constructing loop constraints, accumulated positioning errors are effectively eliminated. Finally, the pose and loop constraints derived from the odometer data are integrated into the optimization model for a large-scale factor map, enabling high-precision 3D reconstruction of the metro tunnel. Field tests conducted at the WeiJianian-ShuangShuianian and ShaHeyuan-DongZikou metro stations in Chengdu, with comparisons with other algorithms, demonstrate that the proposed PLM and HMM sequence matching algorithm significantly improve 3D reconstruction accuracy in metro tunnels, particularly in severely degraded environments. -
Key words:
- Metro tunnels /
- Degenerate scenarios /
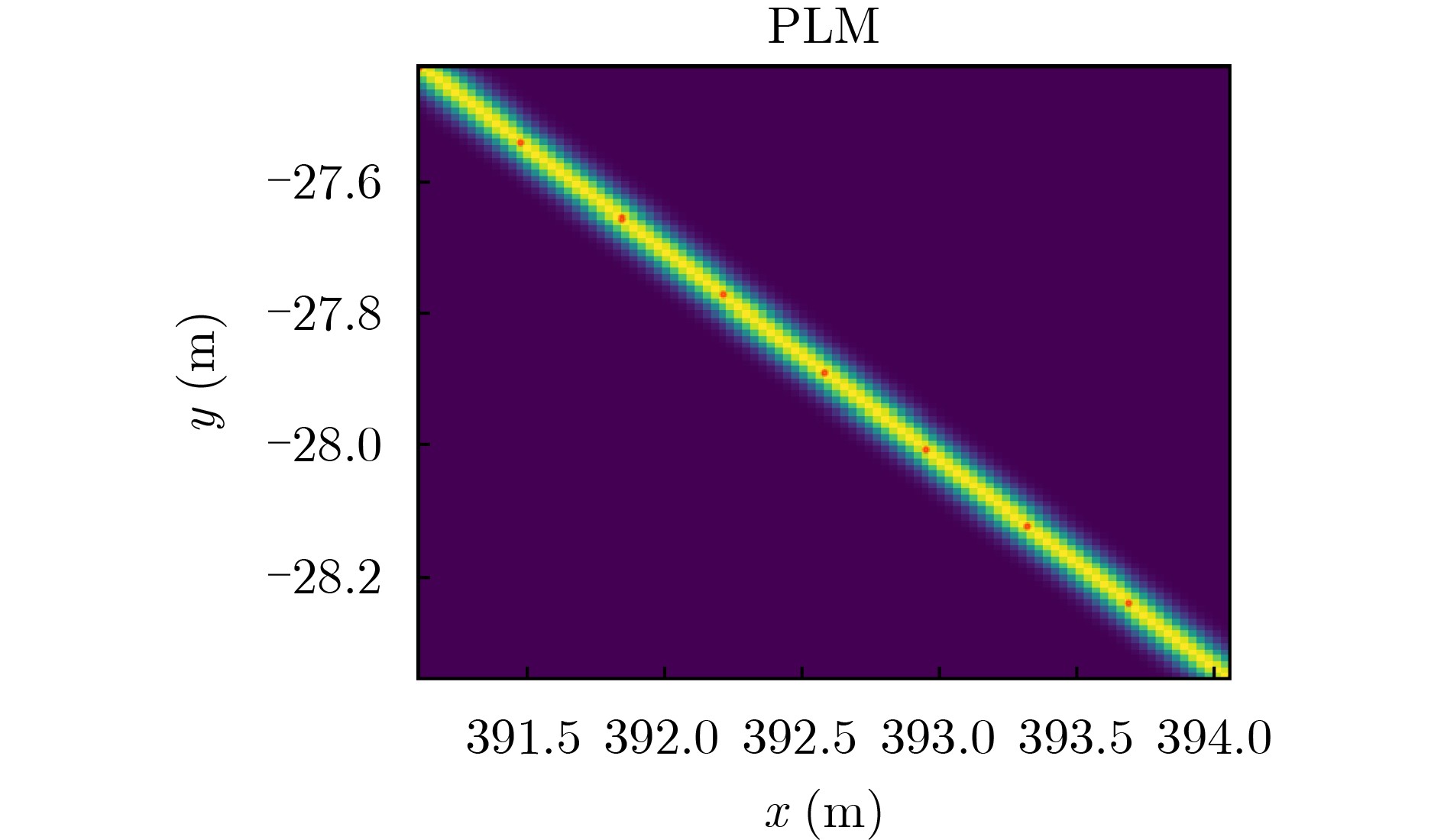
- Path likelihood /
- Sequence matching /
- Factor graph optimization
-
表 1 韦家碾-双水碾消融实验误差评估表 (m)
方法 He Te Re Le DR 59.35 35.82 37.93 77.85 DR+PATH 1.72 0.15 2.81 4.29 DR+PATH+HMM 0.21 0.09 0.37 0.54  下载: 导出CSV
下载: 导出CSV
表 2 韦家碾-双水碾对比实验误差评估表 (m)
方法 He Te Re Le LIO-SAM N/A N/A N/A >100 Faster-LIO N/A N/A N/A >100 本文方法 0.21 0.09 0.37 0.54
下载: 导出CSV
表 3 洞子口-沙河源消融实验误差评估表(m)
方法 He Te Re Le DR 48.09 33.97 25.26 67.81 DR+PATH 1.33 0.12 2.51 3.25 DR+PATH+HMM 0.16 0.09 0.33 0.48
下载: 导出CSV
表 4 洞子口-沙河源对比实验误差评估表 (m)
方法 He Te Re Le LIO-SAM 7.67 2.10 23.09 49.41 Faster-LIO 0.45 0.07 8.79 25.07 本文方法 0.16 0.09 0.33 0.48
下载: 导出CSV
-
[1] 程国柱, 吕岩峰, 冯天军. 地铁站周边常规公交换乘站点布局多目标优化模型[J]. 吉林大学学报(工学版), 2025. doi: 10.13229/j.cnki.jdxbgxb.20240908.CHENG Guozhu, LYU Yanfeng, and FENG Tianjun. Multi-objective optimization model for bus transfer station layouts around metro stations[J]. Journal of Jilin University (Engineering and Technology Edition), 2025. doi: 10.13229/j.cnki.jdxbgxb.20240908. [2] 费伦林, 杨晓秋, 桑运龙, 等. 基于多传感器融合技术的隧道运营安全智能巡检机器人[J]. 中国交通信息化, 2023(3): 146–148. doi: 10.13439/j.cnki.itsc.2023.03.023.FEI Lunlin, YANG Xiaoqiu, SANG Yunlong, et al. Intelligent inspection robot for tunnel operation safety based on multi-sensor fusion technology[J]. China ITS Journal, 2023(3): 146–148. doi: 10.13439/j.cnki.itsc.2023.03.023. [3] 张宗华, 刘巍, 刘国栋, 等. 三维视觉测量技术及应用进展[J]. 中国图象图形学报, 2021, 26(6): 1483–1502. doi: 10.11834/jig.200841.ZHANG Zonghua, LIU Wei, LIU Guodong, et al. Overview of the development and application of 3D vision measurement technology[J]. Journal of Image and Graphics, 2021, 26(6): 1483–1502. doi: 10.11834/jig.200841. [4] ZHOU Zhizhuo and TULSIANI S. SparseFusion: Distilling view-conditioned diffusion for 3D reconstruction[C]. 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, Canada, 2023: 12588–12597. doi: 10.1109/CVPR52729.2023.01211. [5] 梅天灿, 秦宇晟, 杨宏, 等. 动态场景下基于视觉同时定位与地图构建技术的多层次语义地图构建方法[J]. 电子与信息学报, 2023, 45(5): 1737–1746. doi: 10.11999/JEIT220153.MEI Tiancan, QIN Yusheng, YANG Hong, et al. Multilevel semantic maps based on visual simultaneous localization and mapping in dynamic scenarios[J]. Journal of Electronics & Information Technology, 2023, 45(5): 1737–1746. doi: 10.11999/JEIT220153. [6] 周非, 周志远, 张宇曈, 等. 融合神经辐射场和视觉同时定位与地图构建的混合场景表示方法[J]. 电子与信息学报, 2024, 46(11): 4178–4187. doi: 10.11999/JEIT240316.ZHOU Fei, ZHOU Zhiyuan, ZHANG Yutong, et al. Hybrid scene representation method integrating neural radiation fields and visual simultaneous localization and mapping[J]. Journal of Electronics & Information Technology, 2024, 46(11): 4178–4187. doi: 10.11999/JEIT240316. [7] ZHANG Ji and SINGH S. LOAM: Lidar odometry and mapping in real-time[J]. Robotics: Science and Systems, 2014, 2(9): 1–9. [8] SHAN Tixiao and ENGLOT B. LeGO-LOAM: Lightweight and ground-optimized lidar odometry and mapping on variable terrain[C]. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 2018: 4758–4765. doi: 10.1109/IROS.2018.8594299. [9] SHAN Tixiao, ENGLOT B, MEYERS D, et al. LIO-SAM: Tightly-coupled lidar inertial odometry via smoothing and mapping[C]. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, USA, 2020: 5135–5142. doi: 10.1109/IROS45743.2020.9341176. [10] HEIRICH O, ROBERTSON P, and STRANG T. RailSLAM-localization of rail vehicles and mapping of geometric railway tracks[C]. 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 2013: 5212–5219. doi: 10.1109/ICRA.2013.6631322. [11] 李帅鑫, 李九人, 田滨, 等. 面向点云退化的隧道环境的无人车激光SLAM方法[J]. 测绘学报, 2021, 50(11): 1487–1499. doi: 10.11947/j.AGCS.2021.20210248.LI Shuaixin, LI Jiuren, TIAN Bin, et al. A laser SLAM method for unmanned vehicles in point cloud degenerated tunnel environments[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1487–1499. doi: 10.11947/j.AGCS.2021.20210248. [12] DAI Xinye, SONG Weiwei, WANG Yusheng, et al. LiDAR-inertial integration for rail vehicle localization and mapping in tunnels[J]. IEEE Sensors Journal, 2023, 23(15): 17426–17438. doi: 10.1109/JSEN.2023.3286437. [13] JÚNIOR G P C, REZENDE A M C, MIRANDA V F, et al. EKF-LOAM: An adaptive fusion of LiDAR SLAM with wheel odometry and inertial data for confined spaces with few geometric features[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(3): 1458–1471. doi: 10.1109/TASE.2022.3169442. [14] BROSSARD M, BARRAU A, and BONNABEL S. AI-IMU dead-reckoning[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(4): 585–595. doi: 10.1109/TIV.2020.2980758. [15] TAO Qianwen, HU Zhaozheng, LIU Yulin, et al. LiDAR-based localization in tunnel from HD map matching with pavement marking likelihood[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 8504814. doi: 10.1109/TIM.2024.3411138. [16] HANSEN P and BROWNING B. Visual place recognition using HMM sequence matching[C]. 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, IL, USA, 2014: 4549–4555. doi: 10.1109/IROS.2014.6943207. [17] KIM G and KIM A. Scan context: Egocentric spatial descriptor for place recognition within 3D point cloud map[C]. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 2018: 4802–4809. doi: 10.1109/IROS.2018.8593953. [18] 胡钊政, 刘佳蕙, 黄刚, 等. 融合WiFi、激光雷达与地图的机器人室内定位[J]. 电子与信息学报, 2021, 43(8): 2308–2316. doi: 10.11999/JEIT200671.HU Zhaozheng, LIU Jiahui, HUANG Gang, et al. Integration of WiFi, laser, and map for robot indoor localization[J]. Journal of Electronics & Information Technology, 2021, 43(8): 2308–2316. doi: 10.11999/JEIT200671. [19] KAESS M, JOHANNSSON H, ROBERTS R, et al. iSAM2: Incremental smoothing and mapping with fluid relinearization and incremental variable reordering[C]. 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 2011: 3281–3288. doi: 10.1109/ICRA.2011.5979641. [20] JONES M. Sublevel set approximation in the hausdorff and volume metric with application to path planning and obstacle avoidance[J]. IEEE Transactions on Automatic Control, 2024, 69(11): 8112–8119. doi: 10.1109/TAC.2024.3412594. [21] BAI Chunge, XIAO Tao, CHEN Yajie, et al. Faster-LIO: Lightweight tightly coupled lidar-inertial odometry using parallel sparse incremental voxels[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4861–4868. doi: 10.1109/LRA.2022.3152830. -


 下载:
下载:














图(14) / 表(4)
计量
- 文章访问数: 847
- HTML全文浏览量: 623
- PDF下载量: 56
- 被引次数: 0
