

Multi-Model Fusion-Based Abnormal Trajectory Correction Method for Unmanned Aerial Vehicles
-
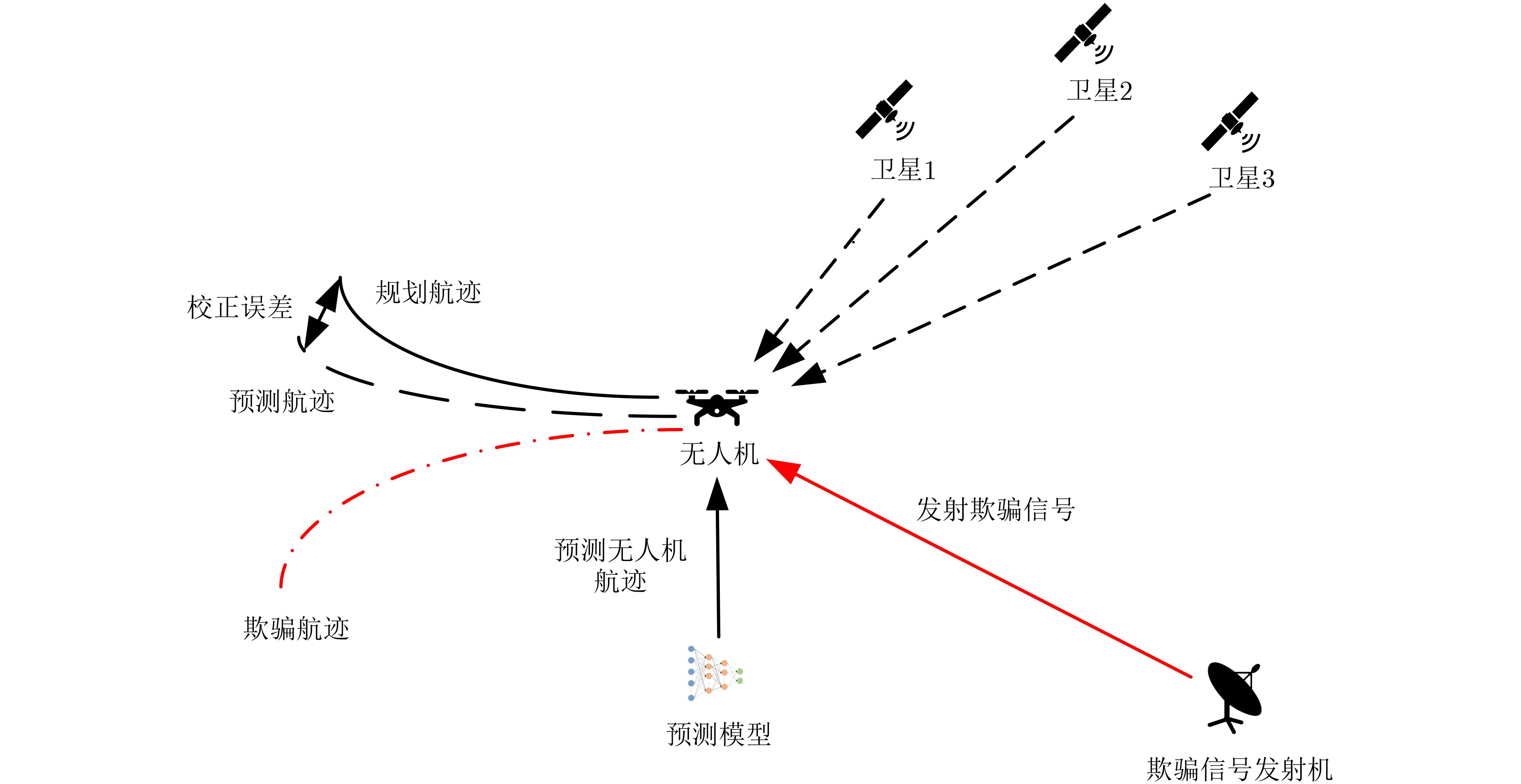
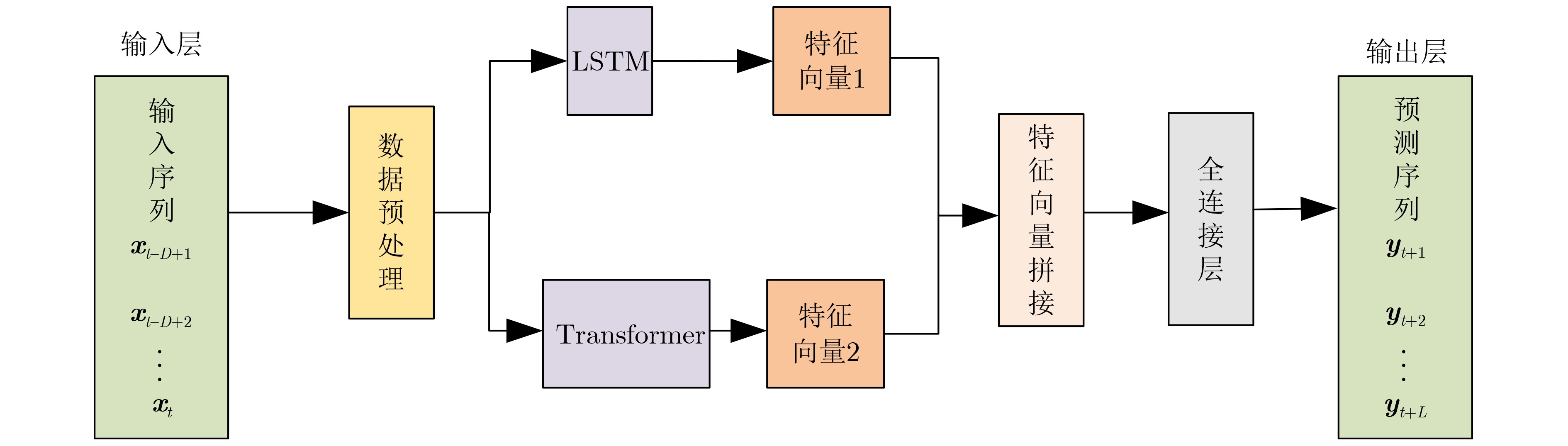
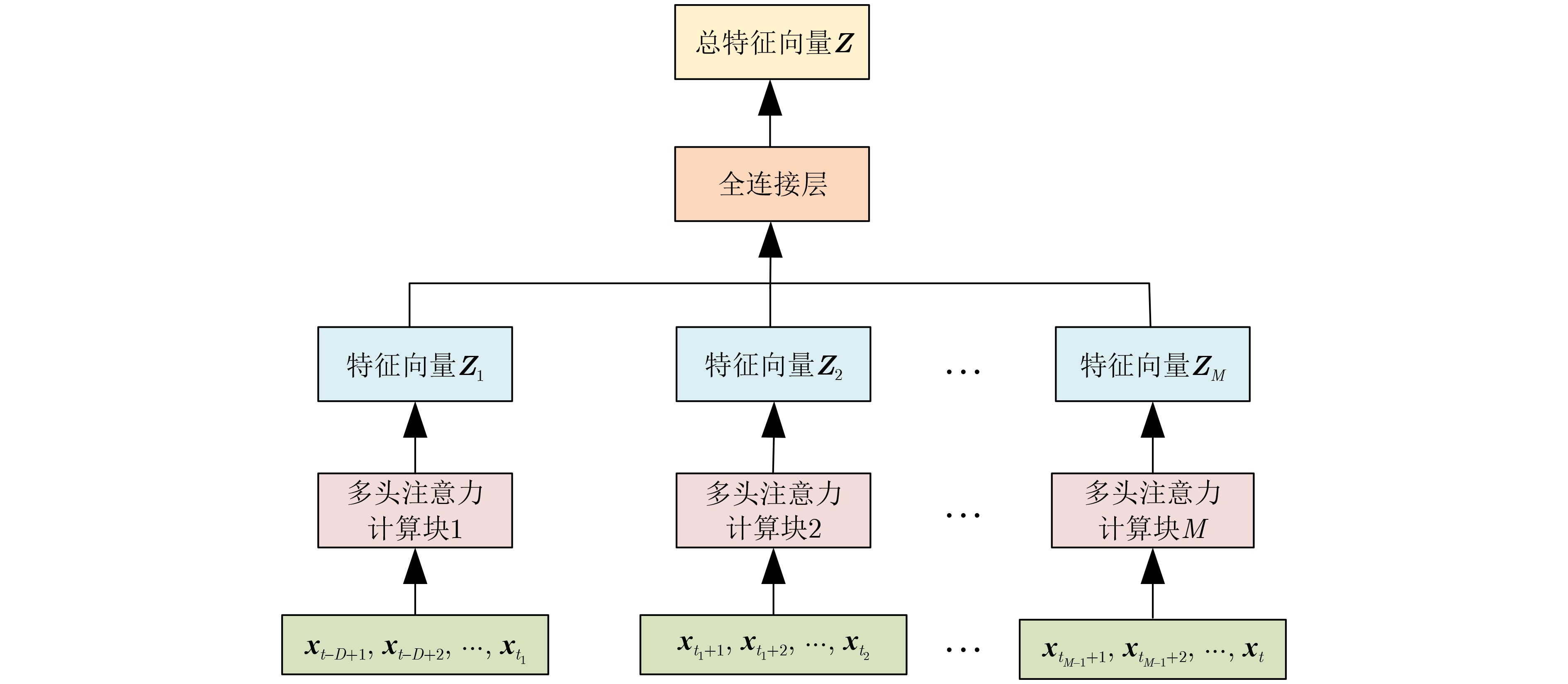
摘要: 低空空域的开放和无人机的大规模应用使得低空飞行活动日益增多,航迹规划是确保无人机在复杂低空环境下有序飞行的关键。然而由于无线遥控链路中存在的干扰、欺骗等各种攻击,导致无人机偏离规划的航迹,给低空安全带来严峻挑战。为减小位置欺骗攻击引起的航迹异常,该文提出一种多模型融合的无人机异常航迹校正方法,通过预测无人机的位置参数进行航迹校正。为了降低长期预测误差对无人机航迹校正的影响,提出融合长短期记忆网络(LSTM)和Transformer的长短期记忆网络-Transformer (LSTM-Transformer)预测模型,并在此基础上提出了分块注意力优化策略,以降低Transformer子模型的计算复杂度,提高无人机异常航迹的校正效率。基于公开数据集,通过与基准方法比较和消融实验,证明了所提方法相比其它方法能够降低无人机异常航迹的校正误差,实现对无人机异常航迹的校正。
-
关键词:
- 无人机 /
- 航迹校正 /
- 多模型融合 /
- 长短期记忆网络-Transformer预测模型 /
- 分块注意力优化策略
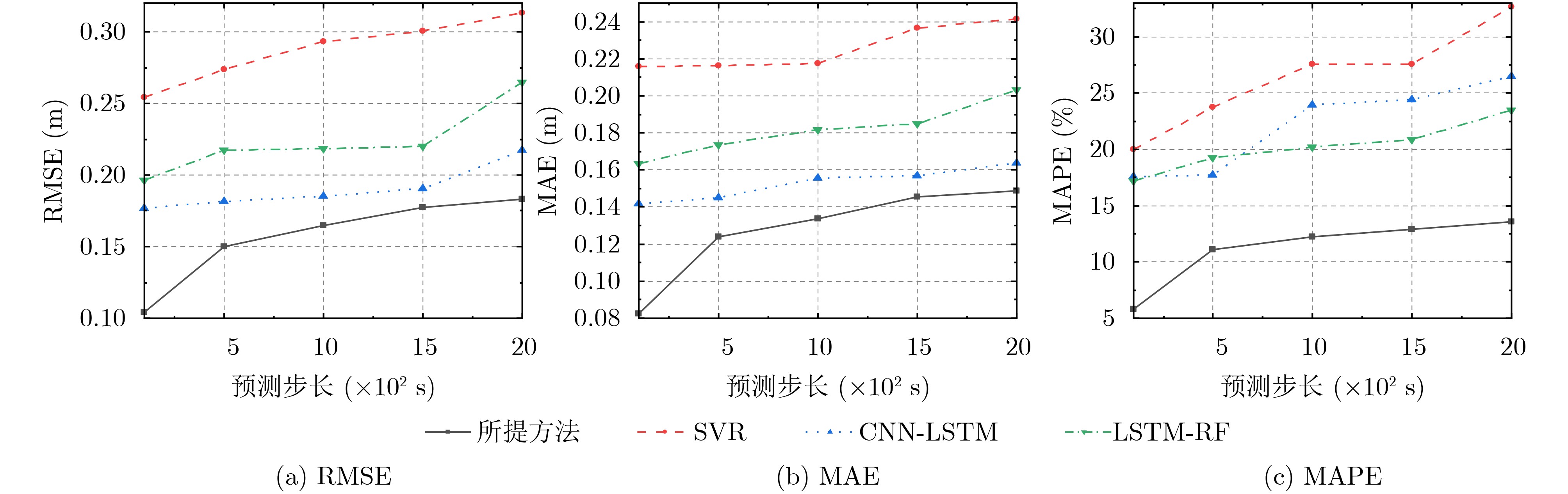
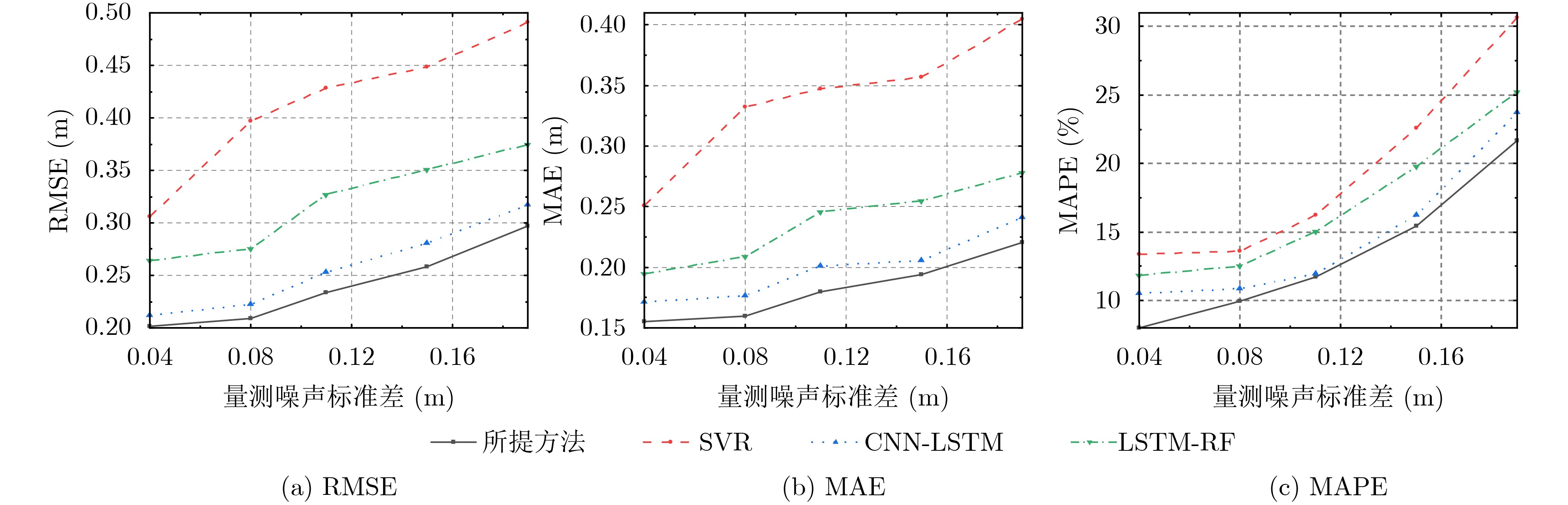
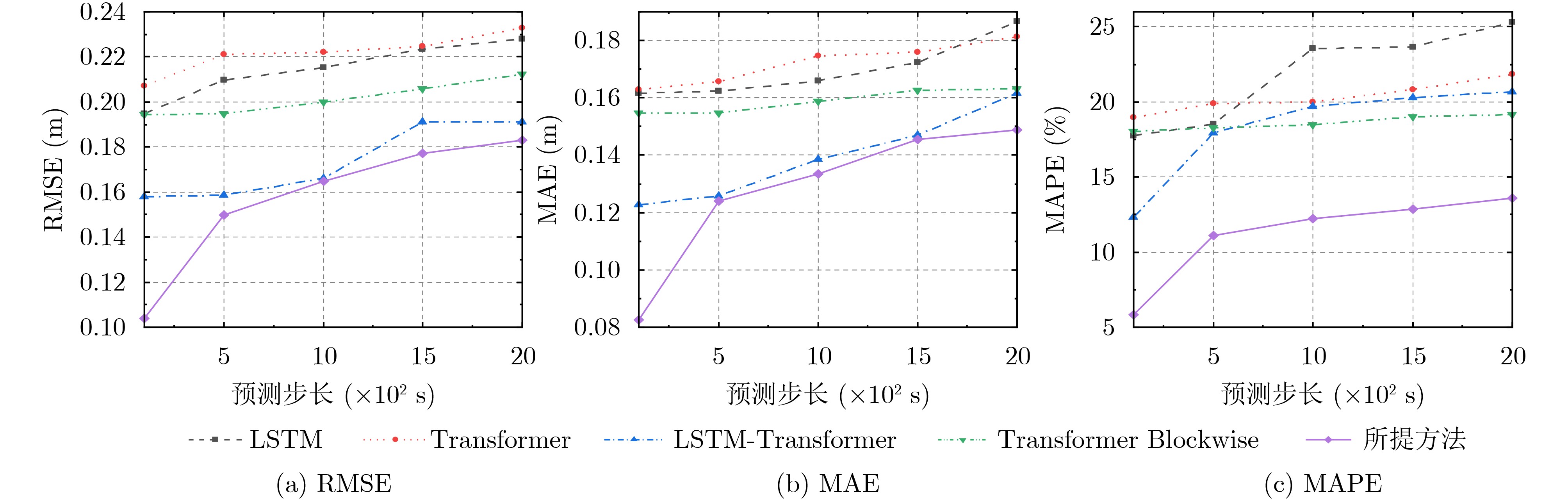
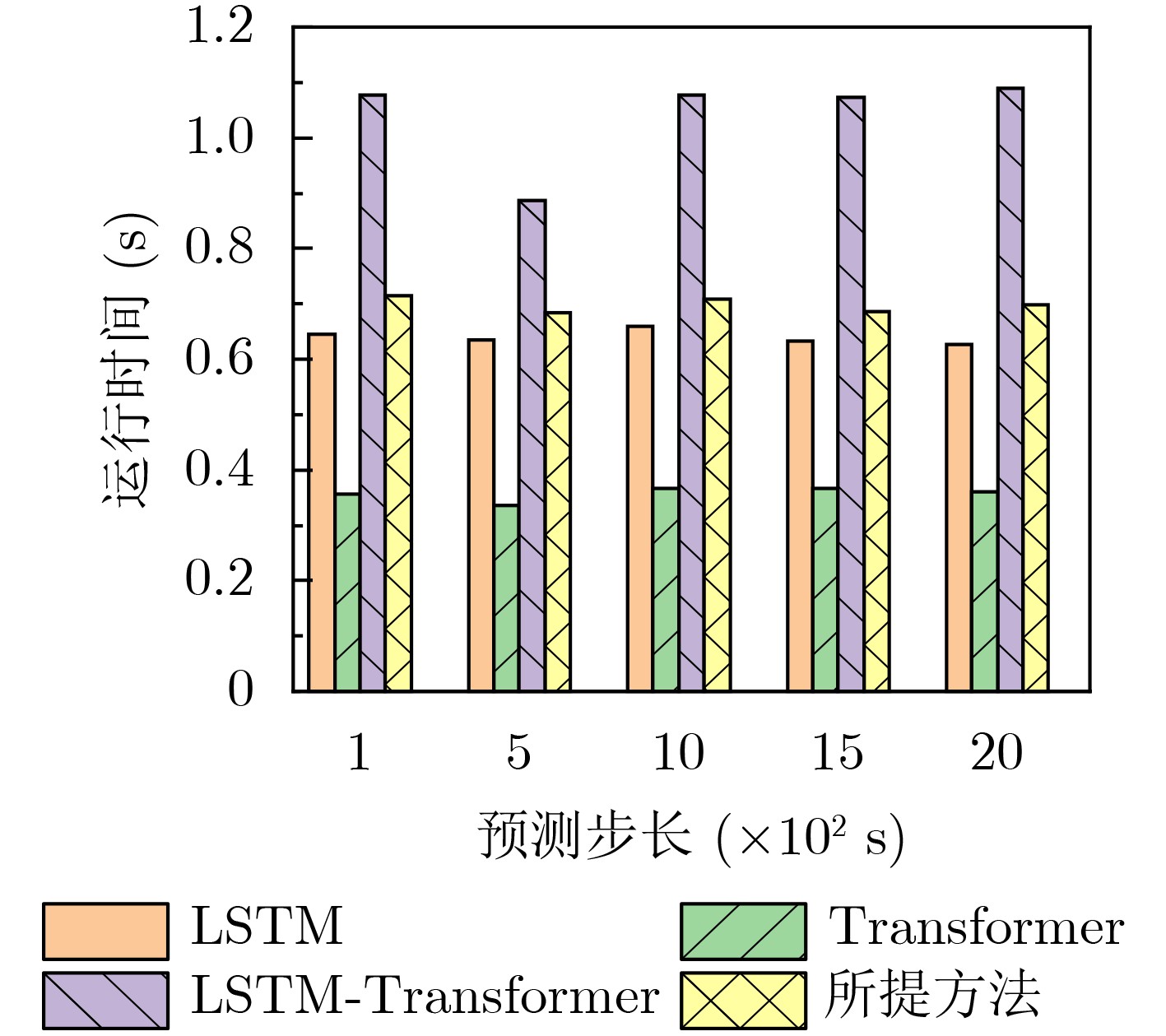
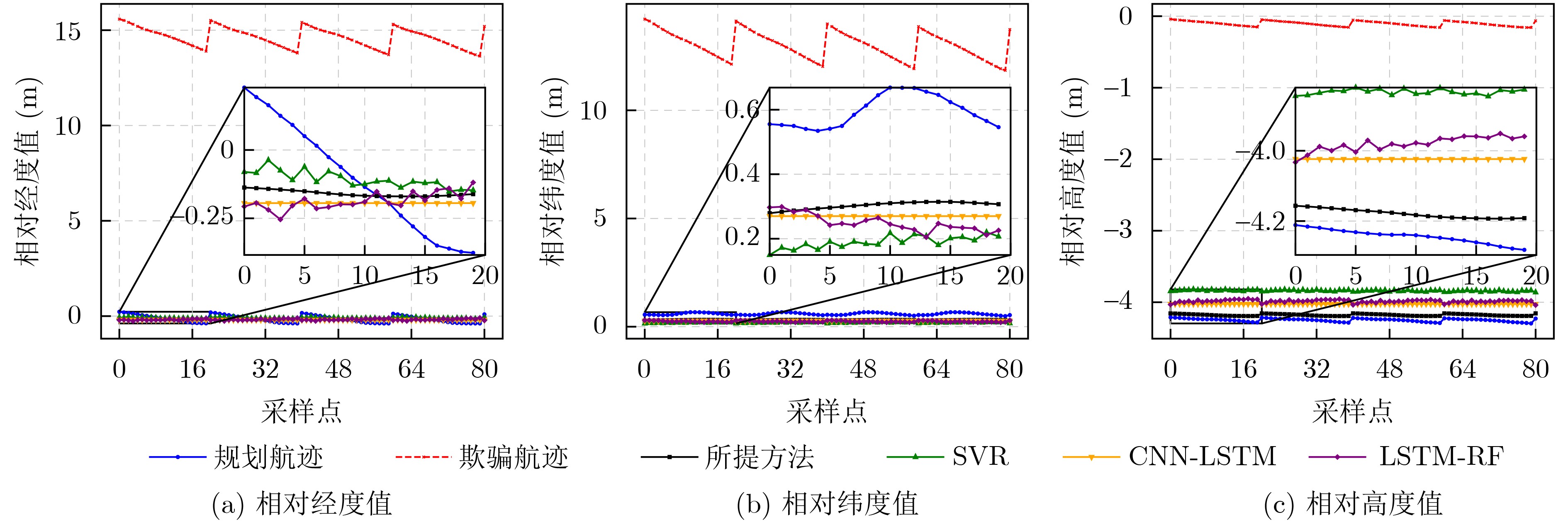
Abstract:Objective The opening of low-altitude airspace and the widespread deployment of Unmanned Aerial Vehicles (UAVs) have significantly increased low-altitude flight activities. Trajectory planning is essential for ensuring UAVs operate safely in complex environments. However, wireless remote control links are vulnerable to interference and spoofing attacks, leading to deviations from planned trajectories and posing serious safety risks. To mitigate these risks, UAV position parameters can be predicted and used to replace erroneous navigation system values, thereby correcting abnormal trajectories. Existing prediction-based correction methods, however, exhibit low efficiency and error accumulation over long-term predictions, limiting their practical application. To address these limitations, this study proposes a multi-model fusion method to improve the efficiency and accuracy of abnormal trajectory correction, providing a robust solution for real-world UAV operations. Methods An Long Short-Term Memory (LSTM)-Transformer prediction model, integrating LSTM and Transformer, is proposed to exploit the strengths of both architectures in time series forecasting. LSTM efficiently captures short-term dependencies in sequential data, whereas Transformer is well-suited for modeling long-term dependencies. By combining these architectures, the proposed model enhances the capture of both short-term and long-term dependencies, reducing prediction errors. The overall framework of the LSTM-Transformer prediction model is illustrated in ( Fig. 3 ). The input time series data undergoes preprocessing before being fed into the LSTM and Transformer sub-models, each generating a corresponding feature vector. These feature vectors are concatenated and further processed by a fully connected layer to extract intrinsic data features, ultimately producing the prediction results. To further optimize the model, a blockwise attention strategy is proposed. The detailed computation process is shown in (Fig. 4 ). During self-attention calculations in the Transformer sub-model, the input sequence is divided into multiple sub-blocks, allowing for parallel computation. The results are then concatenated to obtain the final output. This approach effectively reduces the computational complexity of the Transformer sub-model while improving the efficiency of abnormal trajectory correction. The blockwise attention strategy not only enhances computational efficiency but also maintains prediction accuracy, making it a crucial component of the proposed method.Results and Discussions Experiments are conducted using a public dataset to predict UAV positional parameters, including longitude, latitude, and altitude. The dataset’s feature parameters are presented in ( Table 1 ). The trajectory correction performance of the proposed method is evaluated and compared with other correction methods using Root Mean Square Error (RMSE), Mean Absolute Error (MAE), and Mean Absolute Percentage Error (MAPE). (Fig. 5 ) and (Fig. 6 ) present the error metrics of the proposed method in comparison with Support Vector Regression (SVR), CNN-LSTM, and LSTM-RF under different prediction step sizes and measurement noise standard deviation conditions. The results indicate that the proposed method achieves the lowest correction errors. At a prediction step size of 20 and a measurement noise standard deviation of 0.19, the proposed method achieves RMSE, MAE, and MAPE values of0.2971 ,0.2208 , and 21.688%, respectively. Compared with SVR, CNN-LSTM, and LSTM-RF, the RMSE is reduced by 39.52%, 6.22%, and 20.65%, the MAE by 45.5%, 8.46%, and 20.52%, and the MAPE by 8.955%, 2.03%, and 3.532%, respectively. (Fig. 7 ) and (Fig. 8 ) compare the proposed method with the original LSTM-Transformer, the Transformer with the blockwise attention optimization strategy, and individual LSTM and Transformer models in terms of error metrics under different prediction steps and measurement noise standard deviation conditions. When the prediction step is 20 and the measurement noise standard deviation is 0.19, the proposed method achieves RMSE reductions of 12.23%, 4.07%, 1.36%, and 3.48%, MAE reductions of 19.36%, 6.76%, 3.83%, and 4.21%, and MAPE reductions of 3.84%, 3.616%, 2.075%, and 2.087%, compared to the other four correction methods. These findings demonstrate the superior performance of the proposed method in reducing trajectory correction errors. The runtime efficiency of the proposed method under different prediction steps is evaluated, as shown in (Fig. 9 ). With a prediction step size of 20, the proposed method completes the prediction in 0.699 s, which is 35.87% faster than the original LSTM-Transformer model. This confirms that the blockwise attention optimization strategy enhances correction efficiency. Finally, (Fig. 10 ) presents trajectory comparisons, illustrating the accuracy of the proposed method. The predicted trajectories closely align with actual trajectories, outperforming baseline methods in correcting UAV abnormal trajectories under various conditions.Conclusions The proposed multi-model fusion method for UAV abnormal trajectory correction enhances correction efficiency and reduces errors more effectively than benchmark methods. The results demonstrate that the method achieves accurate and reliable trajectory correction, making it suitable for practical UAV applications. -
表 1 无人机航迹预测特征参数
输入特征 预测特征(输出特征) 局部位置$ (x,y,z) $ 局部位置$ (x,y,z) $ 局部速度$ ({v_x},{v_y},{v_z}) $ 局部加速度$ ({a_x},{a_y},{a_z}) $ 横滚角速度(Roll Speed) 俯仰角速度(Pitch Speed) 偏航角速度(Yaw Speed) 横滚角(Roll) 俯仰角(Pitch) 偏航角(Yaw)  下载: 导出CSV
下载: 导出CSV
表 2 LSTM子模型神经网络配置
神经网络层(layer) 配置参数(configuration) LSTM 1 50 Neurons, Tanh LSTM 2 50 Neurons, Tanh Fully connected 64 Neurons, Relu
下载: 导出CSV
表 3 CNN-LSTM神经网络配置
神经网络层(layer) 配置参数(configuration) 1D Convolution 64 kernels, 2 × 1 kernel size, Relu Max-Pooling 2 × 1 kernel size LSTM 1 50 Neurons, Tanh LSTM 2 50 Neurons, Tanh Fully connected future steps×3 Neurons, SoftMax
下载: 导出CSV
-
[1] 陈新颖, 盛敏, 李博, 等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789.CHEN Xinying, SHENG Min, LI Bo, et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics & Information Technology, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789. [2] HOSSEIN MOTLAGH N, TALEB T, and AROUK O. Low-altitude unmanned aerial vehicles-based internet of things services: Comprehensive survey and future perspectives[J]. IEEE Internet of Things Journal, 2016, 3(6): 899–922. doi: 10.1109/jiot.2016.2612119. [3] DENG Tianping, XU Xiaohui, ZOU Zhiqing, et al. Multidrone parcel delivery via public vehicles: A joint optimization approach[J]. IEEE Internet of Things Journal, 2024, 11(6): 9312–9323. doi: 10.1109/jiot.2023.3323704. [4] 杨君一, 李博, 张钦宇. 基于物理层网络编码的无人机中继网络资源优化[J]. 通信学报, 2021, 42(9): 12–20. doi: 10.11959/j.issn.1000−436x.2021172.YANG Junyi, LI Bo, and ZHANG Qinyu. Resource optimization for UAV relay networks based on physical-layer network coding[J]. Journal on Communications, 2021, 42(9): 12–20. doi: 10.11959/j.issn.1000−436x.2021172. [5] WANG Wei, CHENG Nan, LIU Yiliang, et al. Content delivery analysis in cellular networks with aerial caching and mmWAVE backhaul[J]. IEEE Transactions on Vehicular Technology, 2021, 70(5): 4809–4822. doi: 10.1109/tvt.2021.3074991. [6] WANG Jiaqi, WANG Wei, ZHOU Bo, et al. Frequency-hopping signal recognition of multiple UAVs with template matching[C]. 2024 IEEE/CIC International Conference on Communications in China (ICCC), Hangzhou, China, 2024: 1698–1702. doi: 10.1109/ICCC62479.2024.10681687. [7] 聂伟, 戴琪霏, 杨小龙, 等. 基于多维信号特征的无人机探测识别方法[J]. 电子与信息学报, 2024, 46(3): 1089–1099. doi: 10.11999/JEIT230302.NIE Wei, DAI Qifei, YANG Xiaolong, et al. Unmanned aerial vehicle detection and recognition method based on multi-dimensional signal feature[J]. Journal of Electronics & Information Technology, 2024, 46(3): 1089–1099. doi: 10.11999/JEIT230302. [8] 毕宿志. 空地协同通信定位一体化无人机应急部署优化[J]. 物联网学报, 2024, 8(0): 1–15. doi: 10.11959/j.issn.2096-3750.2024.00428.BI Suzhi. Emergency UAV deployment optimization in an integrated air-ground network with joint communication and localization service[J]. Chinese Journal on Internet of Things, 2024, 8(0): 1–15. doi: 10.11959/j.issn.2096-3750.2024.00428. [9] 聂伟, 文怀志, 谢良波, 等. 一种基于单目视觉的无人机室内定位方法[J]. 电子与信息学报, 2022, 44(3): 906–914. doi: 10.11999/JEIT211328.NIE Wei, WEN Huaizhi, XIE Liangbo, et al. Indoor localization of UAV using monocular vision[J]. Journal of Electronics & Information Technology, 2022, 44(3): 906–914. doi: 10.11999/JEIT211328. [10] PAN Hengchang, WANG Yuanshuo, WANG Wei, et al. Privacy-preserving location authentication for low-altitude UAVs: A blockchain-based approach[J]. Security and Safety, 2024, 3: 2024004. doi: 10.1051/sands/2024004. [11] 佘丁辰, 王威, 王加琪, 等. 基于收缩自编码器的无人机GPS欺骗攻击协同检测方法[J]. 信号处理, 2024, 40(4): 706–718. doi: 10.16798/j.issn.1003-0530.2024.04.009.SHE Dingchen, WANG Wei, WANG Jiaqi, et al. Collaborative detection method of UAV GPS spoofing attack based on shrink autoencoder[J]. Journal of Signal Processing, 2024, 40(4): 706–718. doi: 10.16798/j.issn.1003-0530.2024.04.009. [12] PSIAKI M L and HUMPHREYS T E. GNSS spoofing and detection[J]. Proceedings of the IEEE, 2016, 104(6): 1258–1270. doi: 10.1109/jproc.2016.2526658. [13] GUO Yan, WU Meiping, TANG Kanghua, et al. Covert spoofing algorithm of UAV based on GPS/INS-integrated navigation[J]. IEEE Transactions on Vehicular Technology, 2019, 68(7): 6557–6564. doi: 10.1109/tvt.2019.2914477. [14] YANG Lei, LI Shaobo, ZHANG Yizong, et al. Deep learning-assisted unmanned aerial vehicle flight data anomaly detection: A review[J]. IEEE Sensors Journal, 2024, 24(20): 31681–31695. doi: 10.1109/jsen.2024.3451648. [15] HSIAO Y S, WAN Zishen, JIA Tianyu, et al. MAVFI: An end-to-end fault analysis framework with anomaly detection and recovery for micro aerial vehicles[C]. 2023 Design, Automation & Test in Europe Conference & Exhibition (DATE), Antwerp, Belgium, 2023: 1–6. doi: 10.23919/DATE56975.2023.10137246. [16] HE Yongfu, PENG Yu, WANG Shaojun, et al. ADMOST: UAV flight data anomaly detection and mitigation via online subspace tracking[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 68(4): 1035–1044. doi: 10.1109/tim.2018.2863499. [17] ZHONG Jie, ZHANG Yujie, WANG Jianyu, et al. Unmanned aerial vehicle flight data anomaly detection and recovery prediction based on spatio-temporal correlation[J]. IEEE Transactions on Reliability, 2022, 71(1): 457–468. doi: 10.1109/tr.2021.3134369. [18] YANG Lei, LI Shaobo, LI Chuanjiang, et al. Data-driven unsupervised anomaly detection and recovery of unmanned aerial vehicle flight data based on spatiotemporal correlation[J]. Science China Technological Sciences, 2023, 66(5): 1304–1316. doi: 10.1007/s11431-022-2312-8. [19] YANG Lei, LI Shaobo, LI Chuanjiang, et al. Data-driven multivariate regression-based anomaly detection and recovery of unmanned aerial vehicle flight data[J]. Journal of Computational Design and Engineering, 2024, 11(2): 176–193. doi: 10.1093/jcde/qwae023. [20] WANG Benkuan, LIU Datong, PENG Yu, et al. Multivariate regression-based fault detection and recovery of UAV flight data[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(6): 3527–3537. doi: 10.1109/tim.2019.2935576. [21] 石庆研, 岳聚财, 韩萍, 等. 基于LSTM-ARIMA模型的短期航班飞行轨迹预测[J]. 信号处理, 2019, 35(12): 2000–2009. doi: 10.16798/j.issn.1003-0530.2019.12.008.SHI Qingyan, YUE Jucai, HAN Ping, et al. Short-term flight trajectory prediction based on LSTM-ARIMA Model[J]. Journal of Signal Processing, 2019, 35(12): 2000–2009. doi: 10.16798/j.issn.1003-0530.2019.12.008. [22] KAREVAN Z and SUYKENS J A K. Transductive LSTM for time-series prediction: An application to weather forecasting[J]. Neural Networks, 2020, 125: 1–9. doi: 10.1016/j.neunet.2019.12.030. [23] ZHAO Huachuan, WANG Guochen, XIA Xiuwei, et al. Dynamic positional attention fusion (DPAF): Adaptive encoding and weighted attention for ship motion attitude prediction[J]. IEEE Sensors Journal, 2024, 24(13): 21679–21693. doi: 10.1109/jsen.2024.3399775. [24] ANDAYANI F, THENG L B, TSUN M T, et al. Hybrid LSTM-transformer model for emotion recognition from speech audio files[J]. IEEE Access, 2022, 10: 36018–36027. doi: 10.1109/access.2022.3163856. [25] TANG Song, LI Chuang, ZHANG Pu, et al. Swinlstm: Improving spatiotemporal prediction accuracy using Swin transformer and LSTM[C]. The 2023 IEEE/CVF International Conference on Computer Vision, Paris, France, 2023: 13424–13433. doi: 10.1109/ICCV51070.2023.01239. [26] VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]. The 31st International Conference on Neural Information Processing Systems, Long Beach, USA, 2017: 6000–6010. [27] WANG Jingyu, ZHANG Lu, LI Xueqing, et al. ULSeq-TA: Ultra-long sequence attention fusion transformer accelerator supporting grouped sparse softmax and dual-path sparse LayerNorm[J]. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 2024, 43(3): 892–905. doi: 10.1109/tcad.2023.3329039. [28] REN Qianqian, LI Yang, and LIU Yong. Transformer-enhanced periodic temporal convolution network for long short-term traffic flow forecasting[J]. Expert Systems with Applications, 2023, 227: 120203. doi: 10.1016/j.eswa.2023.120203. [29] DONG Gaochen and CHEN W. Blockwise compression of transformer-based models without retraining[J]. Neural Networks, 2024, 171: 423–428. doi: 10.1016/j.neunet.2023.12.001. [30] WHELAN J, SANGARAPILLAI T, MINAWI O, et al. Novelty-based intrusion detection of sensor attacks on unmanned aerial vehicles[C]. The 16th ACM Symposium on QoS and Security for Wireless and Mobile Networks, Alicante, Spain, 2020: 23–28. doi: 10.1145/3416013.3426446. [31] ZHANG Honghai, YAN Yongjie, LI Shan, et al. UAV behavior-intention estimation method based on 4-D flight-trajectory prediction[J]. Sustainability, 2021, 13(22): 12528. doi: 10.3390/su132212528. [32] WANG Shengdong, LIU Zhenbao, JIA Zhen, et al. Fault detection for UAVs with spatial-temporal learning on multivariate flight data[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 2529517. doi: 10.1109/tim.2024.3440387. [33] HUANG Hongliang, ZHANG Hai, and JIANG Liuyang. An optimal fusion method of multiple inertial measurement units based on measurement noise variance estimation[J]. IEEE Sensors Journal, 2023, 23(3): 2693–2706. doi: 10.1109/jsen.2022.3229475. -

 下载:
下载:




图(10) / 表(3)
计量
- 文章访问数: 970
- HTML全文浏览量: 853
- PDF下载量: 112
- 被引次数: 0
