

Blockage Prediction Based UAV Anti-blockage Trajectory Design in Millimeter-Wave Communication Network
-
摘要: 无人机毫米波通信能够在多种按需服务场景中提供高速数据传输。然而,毫米波信号易受障碍物阻挡,使得路径损耗大,严重影响系统吞吐量性能。为解决这一问题,该文提出一种基于阻挡预测的无人机抗阻挡轨迹规划方法,在障碍物地理信息(包括位置、形状、大小)未知且移动用户定位存在误差的情况下,准确预测链路阻挡并规划无人机飞行轨迹。通过设计引入定位误差泰勒展开项的几何特征向量,对用户与无人机之间的链路阻挡进行预测,进而规划无人机的3维轨迹以有效避免阻挡,提升用户吞吐量。仿真结果表明,针对用户定位误差设计的特征向量能够提高阻挡预测精度。与基于概率阻挡模型的现有算法相比,所提基于阻挡预测的无人机抗阻挡轨迹规划算法尽管复杂度较高,但能够获得更高吞吐量,实现了复杂度与性能之间的均衡。Abstract:
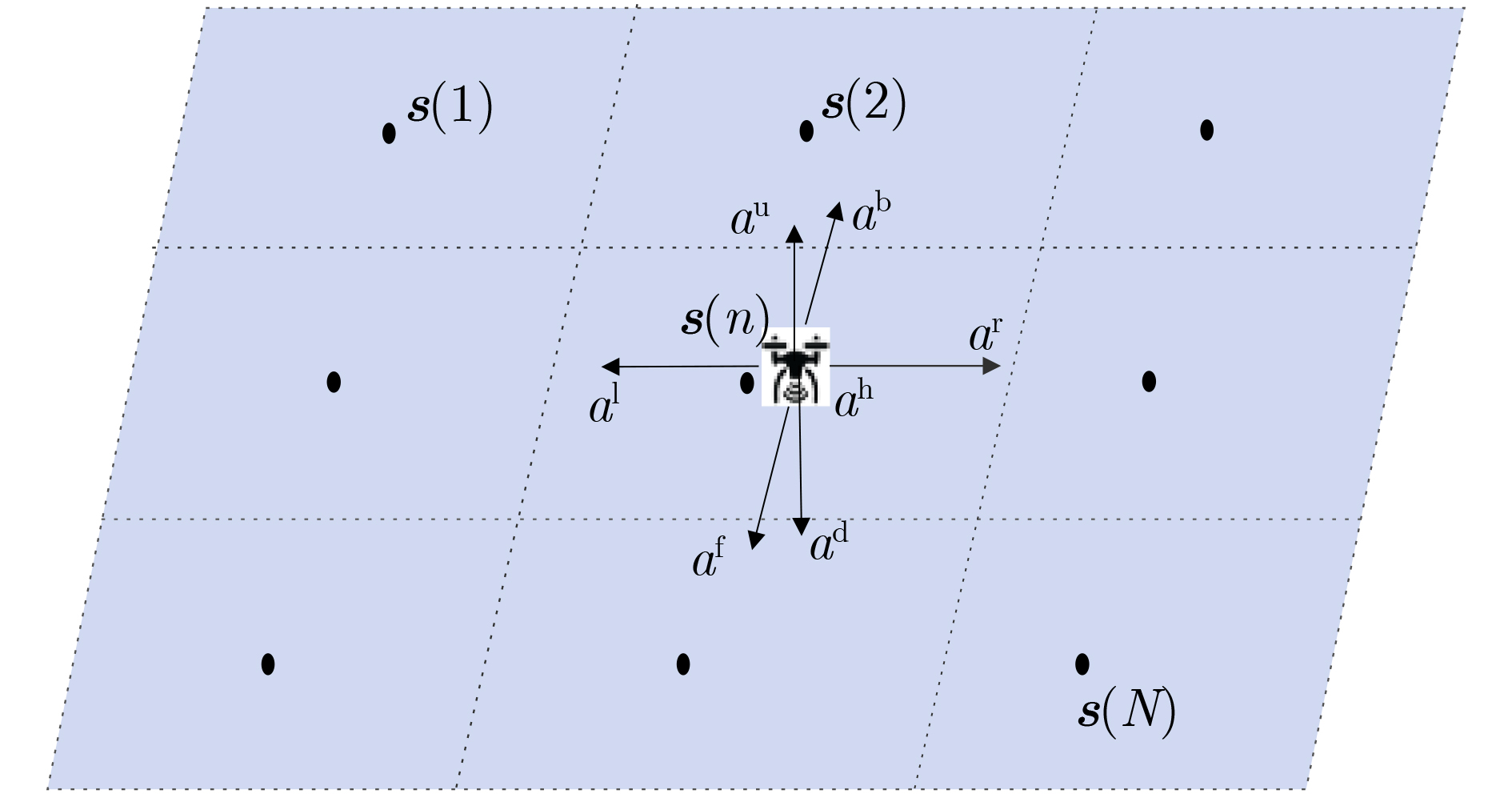
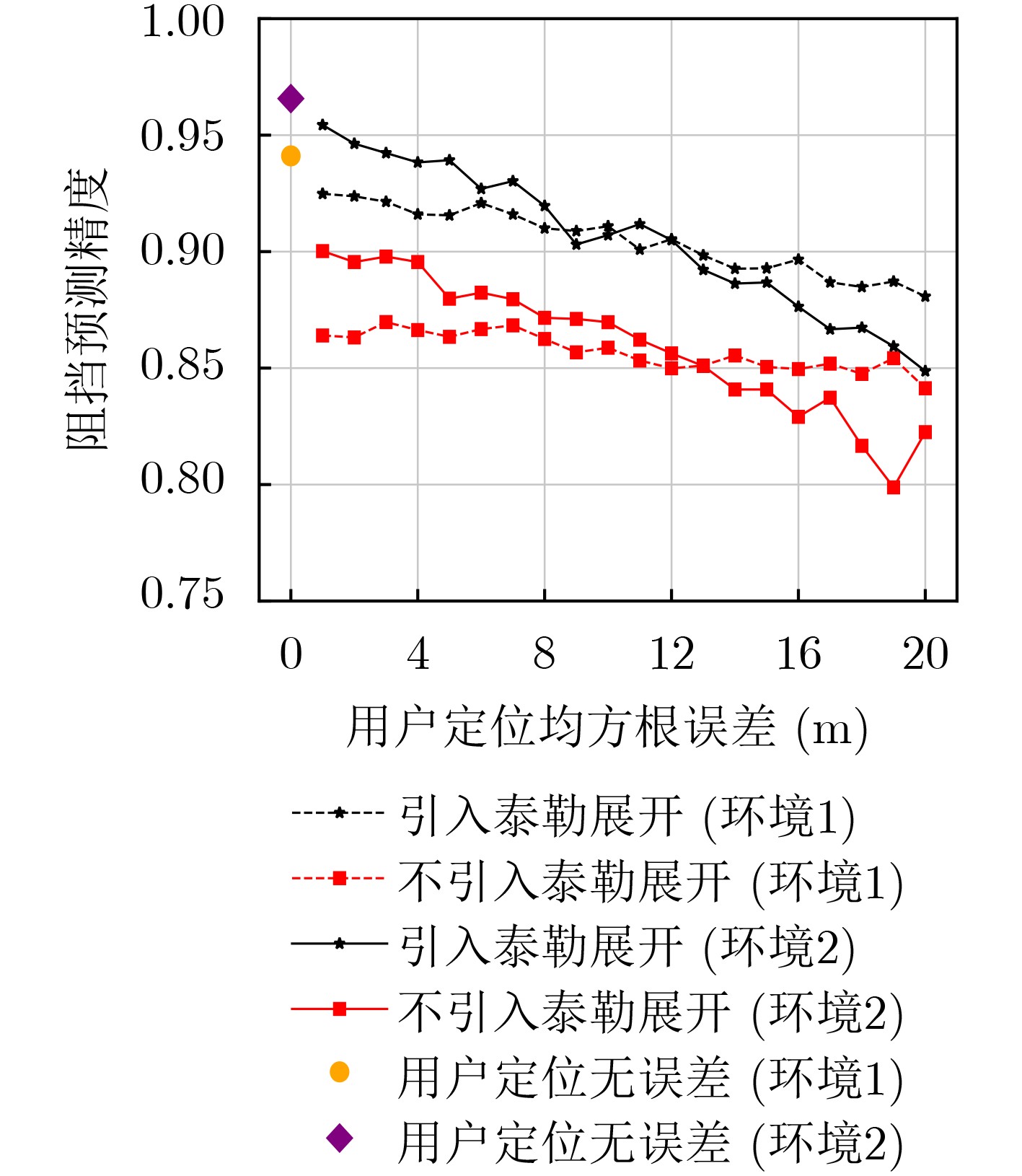
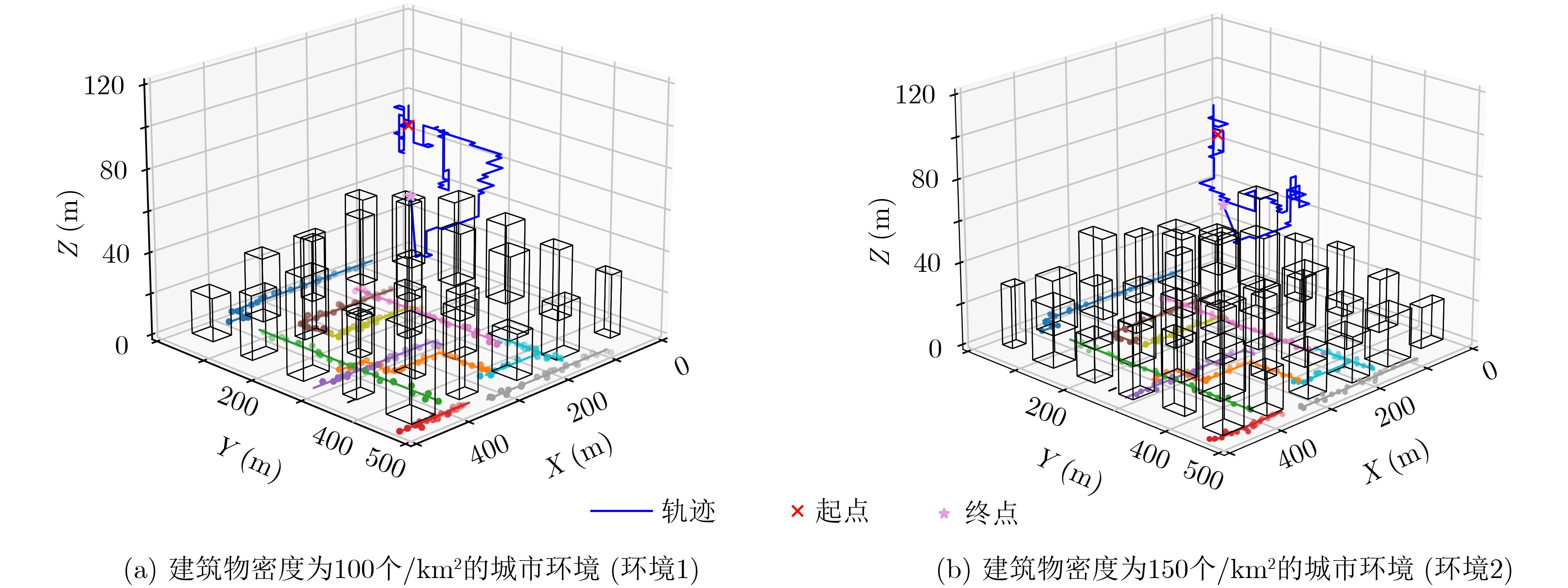
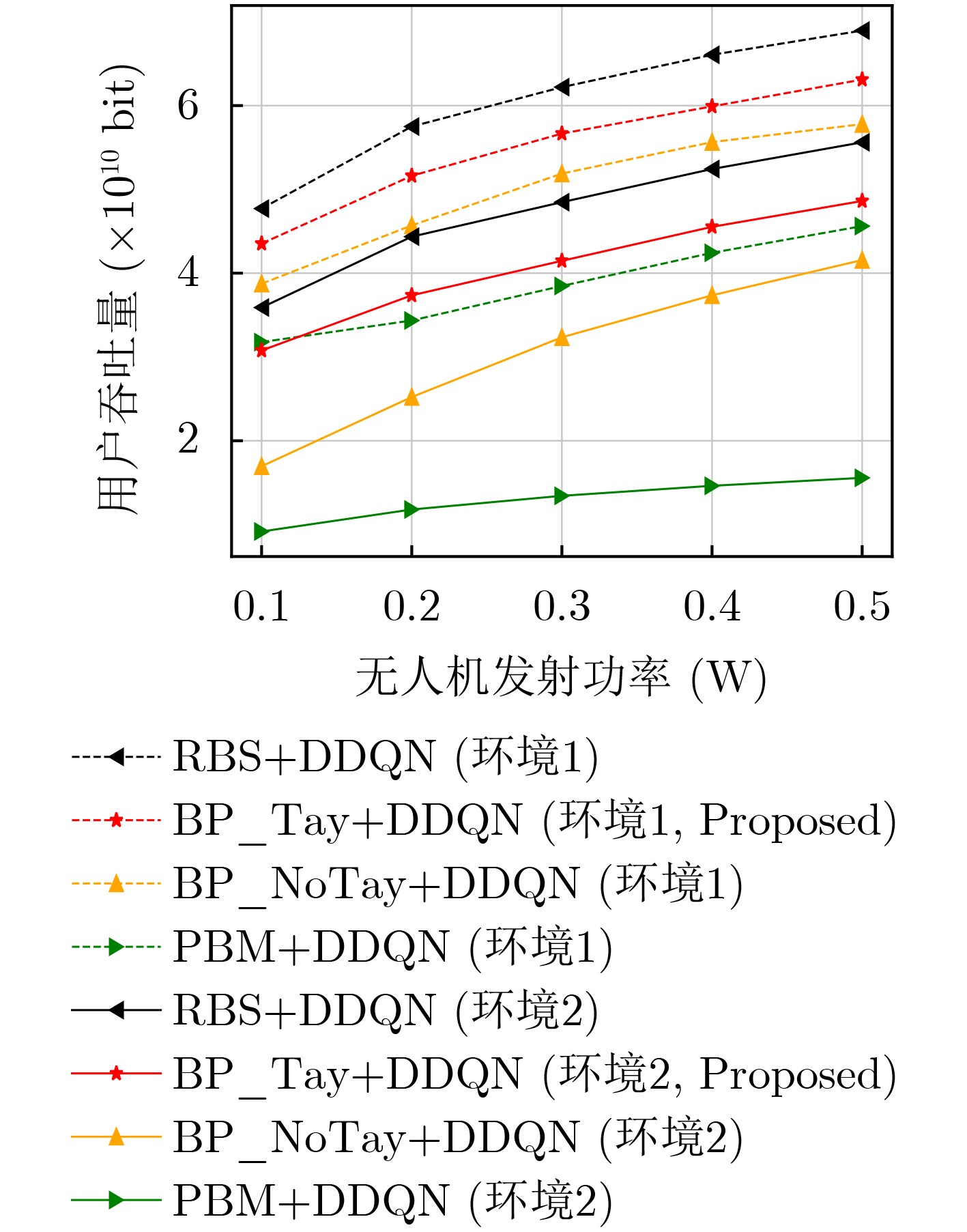
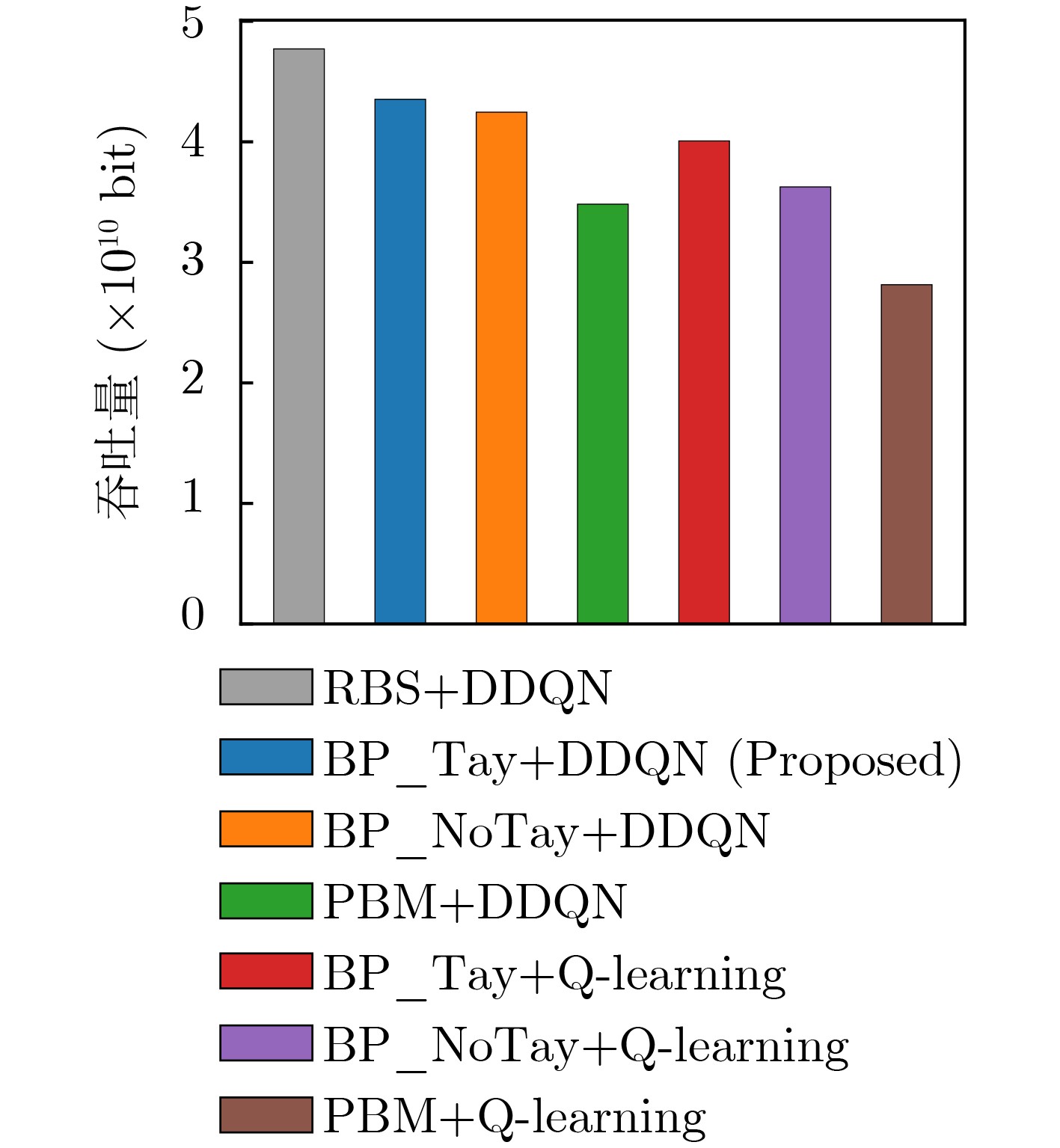
Objective Unmanned Aerial Vehicle (UAV)-assisted millimeter-Wave (mmWave) communication enables high-speed data transmission in diverse on-demand service and emergency scenarios. However, mmWave signals are inherently sensitive to blockage, leading to significant path loss that adversely affects system throughput. Existing anti-blockage strategies primarily rely on the probabilistic blockage model for UAV deployment, which is often limited in accurately reflecting real-time blockage status. To address this issue, a UAV anti-blockage trajectory planning method based on blockage prediction is proposed for scenarios where the geographic information of building obstacles (e.g., location, shape, and size) is unknown and mobile user positioning contains errors. This method enables accurate prediction of the blockage status for UAVs and users at any location, including unvisited areas. A three-Dimensional (3D) UAV trajectory is then designed through an iterative process that alternates between trajectory optimization and blockage prediction to mitigate blockage effects, thereby improving user throughput. Methods Utilizing the locations of the UAV and users, the link blockage is predicted by designing a geometric feature vector that incorporates Taylor expansion terms to account for position errors. Based on this prediction, the UAV’s 3D trajectory is optimized iteratively to avoid blockages and enhance user throughput. A Double Deep Q-Network (DDQN)-based deep reinforcement learning algorithm is employed to address this challenge. During decision-making, the UAV selects an action based on the current Q-value estimate and blockage prediction while maintaining an exploratory capability through a greedy strategy. As the UAV provides communication services, it continuously collects new blockage status data and periodically updates the blockage prediction model, improving prediction accuracy. The iterative interaction between action selection and prediction accuracy refinement enhances overall system performance. Results and Discussions The proposed anti-blockage UAV 3D trajectory design algorithm alternates between blockage prediction and trajectory optimization. Simulation results indicate that the designed feature vector for user positioning errors improves blockage prediction accuracy ( Fig. 5 ). This improvement arises because incorporating Taylor expansion terms yields a feature vector that better approximates the actual user position in the presence of errors compared to one without these terms. Examples of UAV 3D trajectories in mmWave communication networks are demonstrated in two different urban environments (Fig. 6 ). The UAV selects actions based on user locations, resulting in an irregular flight path that aligns with user distribution. The relationship between user throughput and UAV transmit power under different blockage status methods when applying the proposed trajectory planning algorithm is illustrated (Fig. 7 ). In all cases, user throughput increases with higher UAV transmit power, as greater power enhances communication performance. Notably, employing the proposed blockage prediction model achieves higher throughput and closely approximates the performance of the method using real blockage status. This is because the prediction model reduces blockage uncertainty by accurately predicting blockages, thereby better matching the actual environment. The algorithm complexity comparison is presented inTable 3 . The RBS+DDQN (Real Blockage Status + DDQN-Based Path Planning) benchmark algorithm requires complete prior knowledge of the 3D geographic information of buildings, which may pose challenges in real-world applications due to complex data processing and potential latency issues. Compared with existing algorithms that use the probabilistic blockage model, the proposed algorithm, although relatively more complex, does not require building geographic information and achieves higher throughput despite errors in mobile user positioning. Its performance is close to the ideal algorithm with real blockage status, where full geographic information is available (Fig. 8 andFig. 9 ). Therefore, the proposed algorithm achieves a balance between complexity and performance.Conclusions This study proposes an anti-blockage UAV 3D trajectory design algorithm for scenarios where prior building information is unavailable and mobile users have positioning errors. By incorporating a Taylor expansion error term into the feature vector, blockage prediction accuracy is enhanced using UAV and user location data. The blockage prediction model accurately determines blockage status at any position, including unvisited areas. Subsequently, the DDQN algorithm optimizes the UAV trajectory to avoid building blockages, thereby maximizing user throughput. Simulation results demonstrate that introducing the Taylor expansion feature vector improves blockage prediction accuracy in the presence of mobile user positioning errors. Furthermore, although the proposed algorithm has relatively high complexity, it achieves higher user throughput, effectively balancing complexity and performance. -
表 1 系统参数
参数 含义 $ u(n) $ 无人机在第$ n $个时隙的坐标 $ N $ 无人机飞行时隙数 $ {\delta _{\text{t}}} $ 时隙持续时间 $a(n),b(n),z(n)$ 无人机在第$ n $个时隙的横、
纵坐标及高度${\omega _k}(n)$ 无人机和用户之间的阻挡状态 $ {\text{P}}{{\text{L}}_k}(n) $ 第$ k $个用户在第$ n $个时隙的路径损耗 $ {\text{P}}{{\text{L}}^{\text{L}}}(n) $ LoS链路的路径损耗 $ {\text{P}}{{\text{L}}^{\text{N}}}(n) $ NLoS链路的路径损耗 ${d_k}(n)$ 无人机与用户之间的3维距离 $ {R_k}(n) $ 第$ k $个用户在第$ n $个时隙接收到的数据速率 ${\varGamma _k}(n)$ 用户$ k $的接收信噪比 $R$ 用户的总吞吐量 ${{\boldsymbol{u}}_{\text{I}}}$ 无人机的起点 ${{\boldsymbol{u}}_{\text{F}}}$ 无人机的终点 $ {v_{{\text{max}}}} $ 无人机允许的最大飞行速度 ${a_k}(n),{b_k}(n),{H_k}(n)$ 用户$ k $在第$ n $个时隙的横、
纵坐标及高度$\Delta {a_k}(n),\Delta {b_k}(n),\Delta {H_k}(n)$ 用户$ k $在第$ n $个时隙的位置估计
随机误差${{\boldsymbol{l}}_k}(n)$ 用户$ k $在第$ n $个时隙的坐标 $ {a_{\min }} $, $ {a_{\max }} $ 无人机横坐标的最小值、最大值 $ {b_{\min }} $, $ {b_{\max }} $ 无人机纵坐标的最小值、最大值 $ {z_{{\text{min}}}} $, $ {z_{{\text{max}}}} $ 无人机飞行高度的最小值、最大值  下载: 导出CSV
下载: 导出CSV
1 抗阻挡无人机3维轨迹设计
输入:设定最大迭代次数$E$;初始化评估Q网络与目标Q网络,
确保两者具有相同的初始化参数;利用历史数据训练的阻挡预测
模型。输出:无人机的轨迹${\boldsymbol{u}}(n)$与阻挡预测模型 (1) for e = 1, 2,$ \cdots $, E (2) 初始化无人机、用户与目的地位置 (3) for n = 1, 2, $ \cdots $, N (4) 根据$ \varepsilon $-贪婪策略选择动作${\boldsymbol{\vartheta}} (n)$ (5) 计算特征向量并预测阻挡状态${\omega _k}(n)$ (6) 若NLoS链路数量>LoS链路数量,并且未遍历所有可选
择动作则回到步骤(4);否则,执行下一步(7) 执行动作并观测下一状态${\boldsymbol{s}}(n + 1)$,根据公式(14)计算奖
励$r(n)$,并收集无人机或用户在新位置的实际阻挡状态(8) 更新评估Q网络参数 (9) end for (10) 每隔${E_{\text{t}}}$次迭代,更新目标Q网络参数 (11) 每隔${E_{\text{b}}}$次迭代,若收集的数据新增且阻挡预测精度低于
阈值,则更新阻挡预测模型;否则,不更新。(12) end for
下载: 导出CSV
表 2 仿真参数设置
参数 取值 LoS路径损耗参数${\alpha ^{\text{L}}},{\beta ^{\text{L}}},{\sigma _{\text{L}}}$(dB) 61.4, 2, 5.8 NLoS路径损耗参数$ {\alpha ^{\text{N}}},{\beta ^{\mathrm{N}}},{\sigma _{\text{N}}} $(dB) 72, 2.92, 8.7 LoS链路的小尺度衰落参数${m_{\text{L}}}$ 3 NLoS链路的小尺度衰落参数${m_{\text{N}}}$ 2 噪声功率谱密度${N_0}$(dBm/Hz) –174 折扣因子$\gamma $ 0.98 初始探索率$ \varepsilon $ 0.5 探索衰减速率$\alpha $ 0.998 奖励设置参数$ {\varepsilon}_{\text{rd}} $ ${10^{ - 3}}$ 用户数量$K$ 10
下载: 导出CSV
表 3 各算法复杂度比较
本文BP_Tay
+DDQNBP_NoTay
+DDQNPBM
+DDQNBP_Tay
+Q-learningBP_NoTay
+Q-learningPBM
+Q-learning$O( \cdot )$ $ \begin{gathered} O(IMD + D{h_1}{h_2} \cdot \\ BEN|V||S|) \\ \end{gathered} $ $\begin{gathered} O(IMD + D{h_1}{h_2} \cdot \\ BEN|V||S|) \\ \end{gathered} $ $O({h_2}BEN|V||S|)$ $\begin{gathered} O(IMD + D{h_1} \\ EN|V||S|) \\ \end{gathered} $ $\begin{gathered} O(IMD + D{h_1} \\ EN|V||S|) \\ \end{gathered} $ $ O(EN|V||S|) $
下载: 导出CSV
-
[1] ZHOU Di, SHENG Min, LI Jiandong, et al. Aerospace integrated networks innovation for empowering 6G: A survey and future challenges[J]. IEEE Communications Surveys & Tutorials, 2023, 25(2): 975–1019. doi: 10.1109/COMST.2023.3245614. [2] CHEN Wenyun, LIU Chenxi, WANG Wei, et al. Adaptive hybrid beamforming for UAV mmWave communications against asymmetric jitter[J]. IEEE Transactions on Wireless Communications, 2024, 23(8): 9432–9445. doi: 10.1109/TWC.2024.3362384. [3] ZHU Yishi, MAO Bomin, and KATO N. On a novel high accuracy positioning with intelligent reflecting surface and unscented Kalman filter for intelligent transportation systems in B5G[J]. IEEE Journal on Selected Areas in Communications, 2024, 42(1): 68–77. doi: 10.1109/JSAC.2023.3322805. [4] AL-HOURANI A, KANDEEPAN S, and LARDNER S. Optimal LAP altitude for maximum coverage[J]. IEEE Wireless Communications Letters, 2014, 3(6): 569–572. doi: 10.1109/LWC.2014.2342736. [5] ZHU Lipeng, ZHANG Jun, XIAO Zhenyu, et al. Multi-UAV aided millimeter-wave networks: Positioning, clustering, and beamforming[J]. IEEE Transactions on Wireless Communications, 2022, 21(7): 4637–4653. doi: 10.1109/TWC.2021.3131580. [6] YU Xiangbin, HUANG Xu, WANG Kezhi, et al. Joint design of power allocation, beamforming, and positioning for energy-efficient UAV-aided multiuser millimeter-wave systems[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(10): 2930–2945. doi: 10.1109/JSAC.2022.3196111. [7] CHEN Yujia, LIAO Kaimin, KU Menglin, et al. Multi-agent reinforcement learning based 3D trajectory design in aerial-terrestrial wireless caching networks[J]. IEEE Transactions on Vehicular Technology, 2021, 70(8): 8201–8215. doi: 10.1109/TVT.2021.3094273. [8] CHEN Wei, CHANG Dengkai, and CHEN Yujia. Trajectory control in self-sustainable UAV-aided mmWave networks: A constrained multi-agent reinforcement learning approach[C]. 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, South, Korea, 2022: 1017–1022. doi: 10.1109/ICCWorkshops53468.2022.9814650. [9] TONG Ziheng, WANG Jingjing, HOU Xiangwang, et al. UAV-Assisted covert federated learning over mmWave massive MIMO[J]. IEEE Transactions on Wireless Communications, 2024, 23(9): 11785–11798. doi: 10.1109/TWC.2024.3384957. [10] NGUYEN M D, LE L B, and GIRARD A. Integrated UAV trajectory control and resource allocation for UAV-based wireless networks with co-channel interference management[J]. IEEE Internet of Things Journal, 2021, 9(14): 12754–12769. doi: 10.1109/JIOT.2021.3138374. [11] KHAWAJA W, GUVENC I, MATOLAK D W, et al. A survey of air-to-ground propagation channel modeling for unmanned aerial vehicles[J]. IEEE Communications Surveys & Tutorials, 2019, 21(3): 2361–2391. doi: 10.1109/COMST.2019.2915069. [12] ZENG Shuhao, ZHANG Hongliang, DI Boya, et al. Trajectory optimization and resource allocation for OFDMA UAV relay networks[J]. IEEE Transactions on Wireless Communications, 2021, 20(10): 6634–6647. doi: 10.1109/TWC.2021.3075594. [13] 闫莉, 岳涛, 方旭明. 铁路应急场景下无人机通信感知一体化无线网络资源智能分配算法[J]. 电子与信息学报, 2024, 46(9): 3510–3519. doi: 10.11999/JEIT240254.YAN Li, YUE Tao, and FANG Xuming. Intelligent wireless resource allocation algorithm for unmanned aerial vehicle integrated communication and sensing networks in railway emergency scenarios[J]. Journal of Electronics & Information Technology, 2024, 46(9): 3510–3519. doi: 10.11999/JEIT240254. [14] DABIRI M T, HASNA M, ALTHUNIBAT S, et al. Los coverage analysis for UAV-based THz communication networks: Toward 3-D visualization of wireless networks[J]. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(6): 8726–8743. doi: 10.1109/TAES.2024.3440274. [15] XIA W, RANGAN S, MEZZAVILLA M, et al. Generative neural network channel modeling for millimeter-wave UAV communication[J]. IEEE Transactions on Wireless Communications, 2022, 21(11): 9417–9431. doi: 10.1109/TWC.2022.3176480. [16] MA Xue, HE Chen, LI Xiaoya, et al. Low cost anti-blockage UAV 3D trajectory design in millimeter-wave communication networks[C]. 2025 14th International Conference on Communications, Circuits and Systems (ICCCAS), Wuhan, China, 2025. [17] XU Dongfang, SUN Yan, NG D W K, et al. Multiuser MISO UAV communications in uncertain environments with no-fly zones: Robust trajectory and resource allocation design[J]. IEEE Transactions on Communications, 2020, 68(5): 3153–3172. doi: 10.1109/TCOMM.2020.2970043. [18] AKDENIZ M R, LIU Yuanpeng, SAMIMI M K, et al. Millimeter wave channel modeling and cellular capacity evaluation[J]. IEEE Journal on Selected Areas in Communications, 2014, 32(6): 1164–1179. doi: 10.1109/JSAC.2014.2328154. [19] MA Cunyan, LI Xiaoya, HE Chen, et al. Coverage analysis of single-swarm mmWave UAV networks under multiple types of blockages[J]. IEEE Transactions on Communications, 2024, 72(12): 7907–7921. doi: 10.1109/TCOMM.2024.3415611. [20] MA Xue, HE Chen, LI Xiaoya, et al. Joint blockage prediction and UAV deployment in millimeter-wave communication networks[J]. IEEE Transactions on Vehicular Technology, 2024, 73(11): 17881–17886. doi: 10.1109/TVT.2024.3430233. [21] MEI Haibo, YANG Kun, LIU Qiang, et al. 3D-trajectory and phase-shift design for RIS-assisted UAV systems using deep reinforcement learning[J]. IEEE Transactions on Vehicular Technology, 2022, 71(3): 3020–3029. doi: 10.1109/TVT.2022.3143839. [22] ZENG Yong, XU Xiaoli, JIN Shi, et al. Simultaneous navigation and radio mapping for cellular-connected UAV with deep reinforcement learning[J]. IEEE Transactions on Wireless Communications, 2021, 20(7): 4205–4220. doi: 10.1109/TWC.2021.3056573. [23] LI Fan, HE Chen, LI Xiaoya, et al. Geometric analysis-based 3D anti-block UAV deployment for mmWave communications[J]. IEEE Communications Letters, 2022, 26(11): 2799–2803. doi: 10.1109/LCOMM.2022.3201842. [24] ZHONG Ruikang, LIU Xiao, LIU Yuanwei, et al. Multi-agent reinforcement learning in NOMA-aided UAV networks for cellular offloading[J]. IEEE Transactions on Wireless Communications, 2022, 21(3): 1498–1512. doi: 10.1109/TWC.2021.3104633. [25] LEE S, YU H, and LEE H. Multiagent Q-learning-based multi-UAV wireless networks for maximizing energy efficiency: Deployment and power control strategy design[J]. IEEE Internet of Things Journal, 2022, 9(9): 6434–6442. doi: 10.1109/JIOT.2021.3113128. [26] XIA Xiaochen, WANG Yurong, XU Kui, et al. Toward digitalizing the wireless environment: A unified A2G information and energy delivery framework based on binary channel feature map[J]. IEEE Transactions on Wireless Communications, 2022, 21(8): 6448–6463. doi: 10.1109/TWC.2022.3149636. -


 下载:
下载:





图(9) / 表(4)
计量
- 文章访问数: 784
- HTML全文浏览量: 399
- PDF下载量: 49
- 被引次数: 0
