

Methods for Enhancing Positioning Reliability in Indoor and Underground Satellite-shielded Environments
-
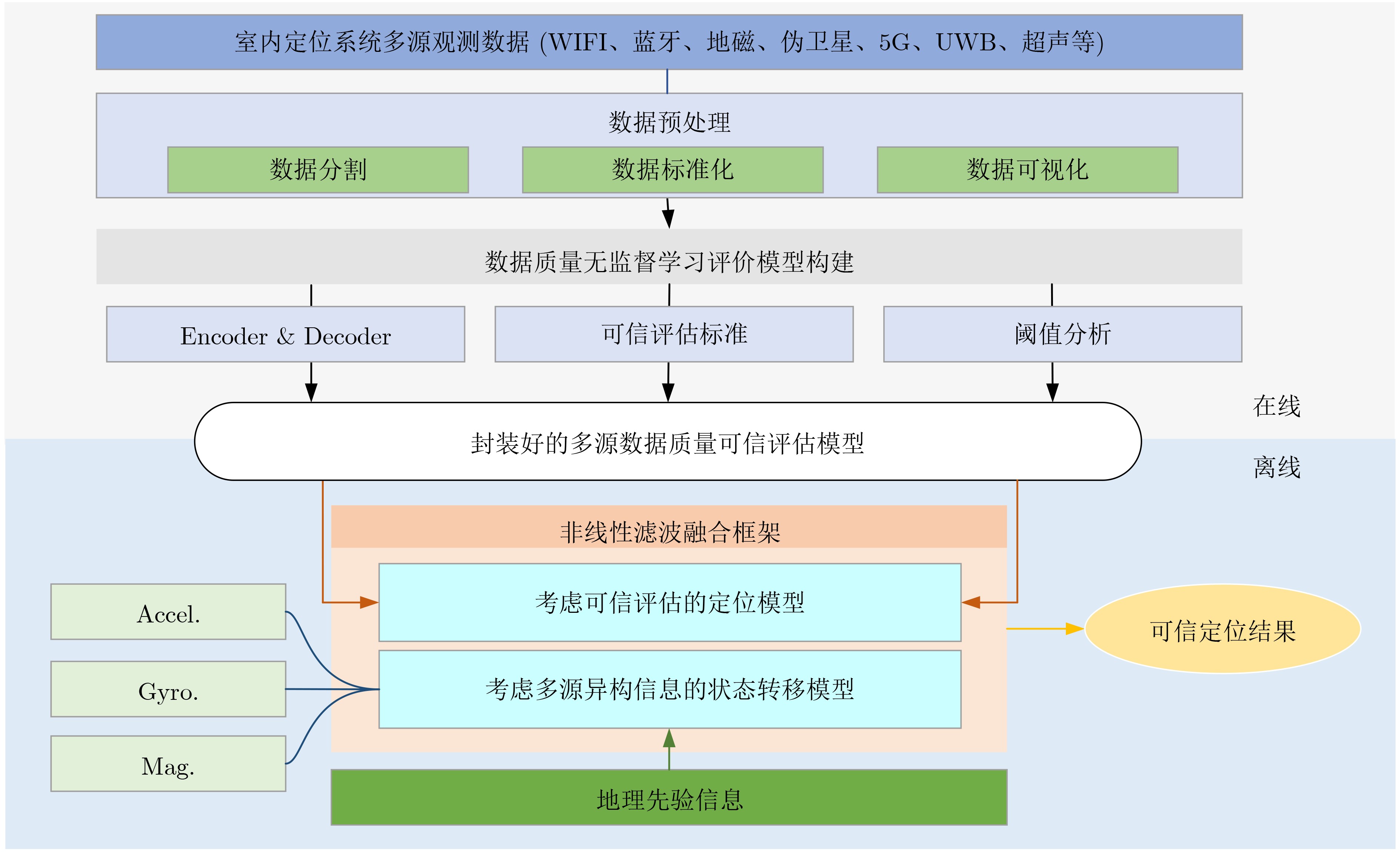
摘要: 该文提出一种无监督自编码器及非线性滤波结合的室内定位可信性提升方法,设计了深度卷积神经网络辅助的降噪变分自编码器模型(DVAE-CNN),分别从量测数据质量评估、目标状态转移方程表征以及环境先验信息辅助的权重更新策略多方面调控定位结果,克服复杂室内环境下由于信息丢失、出错、扰动等因素带来的定位可信性低的问题,相比未增加可信调控机制的定位结果平均定位精度提升了74.6%,定位可靠性提高了88.2%。最后,在2022北京冬奥会体育场馆内进行了大量试验,结果表明所提方法能够提供高鲁棒、高可信、高连续的位置服务能力,具有较大的应用及推广价值。Abstract:
This paper proposes a method to enhance the reliability of indoor positioning by combining an unsupervised autoencoder with nonlinear filtering. A Denoising Variational AutoEncoder model assisted by a deep Convolutional Neural Network (DVAE-CNN) is designed to regulate the positioning results from multiple aspects, including measurement data quality evaluation, target state transition modeling, and weight update strategies aided by environmental prior information. This approach addresses the issue of low positioning reliability caused by information loss, errors, and disturbances in complex indoor environments. Compared to positioning results without the reliability control mechanism, the proposed method improves average positioning accuracy by 74.6% and positioning reliability by 88.2%. Extensive experiments conducted in the venues of the Beijing 2022 Winter Olympics demonstrate that the proposed method provides highly robust, reliable, and continuous positioning services, showing significant potential for practical application and promotion. Objective With the rapid development of indoor positioning technologies, ensuring high reliability and trustworthiness in complex indoor and underground satellite-shielded environments remains a critical challenge. Existing methods often prioritize accuracy and continuity but neglect reliability under environmental disturbances such as signal loss, noise, and multipath effects. To address these limitations, this study proposes a multi-level trustworthiness enhancement framework by integrating an unsupervised Denoising Variational AutoEncoder with a Convolutional Neural Network (DVAE-CNN) and nonlinear particle filtering. The goal is to improve positioning reliability through data quality assessment, environmental prior information fusion, and adaptive state transition constraints, thereby supporting robust location-based services in challenging environments like the 2022 Beijing Winter Olympics venues. Methods The proposed framework combines a DVAE-CNN model for denoising and feature extraction with a particle filtering mechanism incorporating environmental priors and sensor data. The DVAE-CNN evaluates measurement data quality by reconstructing noisy inputs and identifying anomalies through reconstruction probability thresholds. Concurrently, nonlinear particle filtering integrates multi-source heterogeneous data (e.g., inertial sensors, Wi-Fi, and indoor maps) to constrain particle distributions based on motion patterns and structural boundaries. A weight update strategy dynamically adjusts particle importance using prior knowledge, while adaptive step-length estimation refines Pedestrian Dead Reckoning (PDR) to reduce cumulative errors. Results and Discussions Extensive experiments in controlled environments and real-world Olympic venues demonstrate significant improvements. Compared to baseline methods without trustworthiness mechanisms, the proposed approach achieves a 74.6% increase in average positioning accuracy and an 88.2% enhancement in reliability. In dynamic tests at the Beijing Winter Olympics venues, the method eliminated trajectory jumps caused by signal loss and improved coverage continuity by 34%, ensuring seamless navigation in complex indoor spaces. The fusion of DVAE-CNN-based anomaly detection and environmental constraints effectively suppressed “wall-penetrating” particles, enhancing result plausibility. Conclusions This study addresses the critical issue of positioning trustworthiness in indoor and underground environments by integrating data-driven anomaly detection with multi-source fusion. Key contributions include: (1) A DVAE-CNN model that improves data quality assessment and noise resilience; (2) A particle filtering framework leveraging environmental priors and adaptive PDR for robust state estimation; (3) Validation in high-stakes scenarios, achieving sub-meter accuracy and high reliability. Limitations, such as PDR’s cumulative errors, warrant further exploration. Future work will focus on real-time optimization and sensor noise modeling for broader applications. -
1 多源数据可信评估模型训练与使用
输入:多源数据X;可信评估阈值α。 输出:评估模型 B。 (1) 数据预处理(数据规范化、输入数据拦截、添加噪声、数据级
别划分,包括训练、测试和验证数据);(2) while 编码器模型训练 do (3) 初始化DVAE-CNN模型并设置超参数; (4) 载入训练数据集; (5) 得到均值和方差以及样本的隐含特征$ z $; (6) 通过解码器获取重构数据; (7) 通过比较重构数据和原始数据得到重构误差e; (8) 确定模型是否已收敛到设置的阈值,如果满足收敛条件,
则设置提前停止机制以结束训练。如果没有,则转到步
骤(6);(9) 微调网络并更新参数,重复步骤(4)~(6),直到模型收敛; (10) 保存模型参数; (11) 使用$ \eta $来评估$ t $时刻图谱$ {x_{(t)}} $; (12) while 执行新的测量值 do (13) if 重构误差e小于可信阈值$ \alpha $then (14) 输入到定位模型; (15) else剔除当前时刻的数据,并重复步骤(12);end if.  下载: 导出CSV
下载: 导出CSV
2 位置可信性提升方法
输入:先验地图信息;粒子数量$ n $,粒子步长$ L $,可信评估阈值
$ \alpha $;重采样阈值$ \tau $;输出:可信定位结果$ P $。 (1) 初始化:从初始状态分布中采样一组粒子; (2) while 定位结果 do (3) for 每一个粒子 do (4) 通过式(17)更新当前位置; (5) 按公式$ \omega = \dfrac{1}{{\sqrt {2{\pi}} {\sigma _\omega }}}\exp \left\{ { - \dfrac{{{{\left| {s - P'} \right|}^2}}}{{2{\sigma _\omega }^2}}} \right\} $更新权重信息, 其
中$ s $是当前时刻的粒子状态,$ {\sigma _\omega } $是测量偏差。(6) if 粒子穿过墙壁(或建筑结构)then (7) 将相应粒子的权重设置为0,即消除可能的异常位置; (8) end if (9) if 粒子数小于$ \tau $then (10) 重采样:基于权重生成新粒子(多项式重采样); (11) end if (12) 通过粒子状态和权重获得当前定位结果; (13) end for (14) end while
下载: 导出CSV
表 1 DVAE-CNN模型超参数
超参数设置 数值设置 输入数据尺寸 25×25(根据地图确定) 卷积层 3×3 filter size, stride = 2 latent_dim 20 激活函数 ReLU(Rectified Liner Unit) 卷积层数 2 Pooling Size 2 Dropout 0.5 全连接层数 2 优化器 Adam 学习率 0.000 1 Batch Size 32 Epochs 500(EarlyStopping, patience = 10,
verbose=1)
下载: 导出CSV
表 2 冬奥场馆多场景定位性能统计(m)
测试区域 参考位置 定位结果 X误差 Y误差 X Y X Y X Y 看台北区 134.25
141.57
137.4943.12
35.98
51.15134.19
141.96
137.8543.20
34.95
52.660.06
0.39
0.360.08
1.03
0.51看台南区 12.45
7.68
18.2217.50
15.39
19.1011.93
7.05
18.5216.32
15.01
17.860.52
0.63
0.301.18
0.38
1.24
下载: 导出CSV
-
[1] BI Jingxue, ZHAO Mwiqi, YAO Guobiao, et al. PSOSVRPos: WiFi indoor positioning using SVR optimized by PSO[J]. Expert Systems with Applications, 2023, 222: 119778. doi: 10.1016/j.eswa.2023.119778. [2] CAO Hongji, WANG Yunjia, BI Jingxue, et al. LOS compensation and trusted NLOS recognition assisted WiFi RTT indoor positioning algorithm[J]. Expert Systems with Applications, 2024, 243: 122867. doi: 10.1016/j.eswa.2023.122867. [3] ASSAYAG Y, OLIVEIRA H, SOUTO E, et al. Adaptive path loss model for BLE indoor positioning system[J]. IEEE Internet of Things Journal, 2023, 10(14): 12898–12907. doi: 10.1109/JIOT.2023.3253660. [4] ASSAYAG Y, OLIVEIRA H, SOUTO E, et al. A model-based BLE indoor positioning system using particle swarm optimization[J]. IEEE Sensors Journal, 2024, 24(5): 6898–6908. doi: 10.1109/JSEN.2024.3352535. [5] ZHANG Heng and PAN Shuguo. LSOS: An FG position method based on group phase ranging ambiguity estimation of BeiDou pseudolite[J]. Remote Sensing, 2023, 15(7): 1924. doi: 10.3390/rs15071924. [6] YU Baoguo, HUANG Lu, BAO Yachuan, et al. Research status and trends of indoor positioning and navigation technology in China[J]. Journal of Geodesy and Geoinformation Science, 2023, 6(3): 87–101. doi: 10.11947/j.JGGS.2023.0309. [7] LIANG Xiaohu, PAN Shuguo, YU Baohuo, et al. A pseudo-satellite fingerprint localization method based on discriminative deep belief networks[J]. Remote Sensing, 2024, 16(8): 1430. doi: 10.3390/rs16081430. [8] QU Junwei. A review of UWB indoor positioning[J]. Journal of Physics: Conference Series, 2023, 2669(1): 012003. doi: 10.1088/1742-6596/2669/1/012003. [9] SANTORO L, NARDELLO M, BRUNELLI D, et al. UWB-based indoor positioning system with infinite scalability[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 1005711. doi: 10.1109/TIM.2023.3282299. [10] LIU Zhaoliang, CHEN Liang, ZHOU Xin, et al. Machine learning for time-of-arrival estimation with 5G signals in indoor positioning[J]. IEEE Internet of Things Journal, 2023, 10(11): 9782–9795. doi: 10.1109/JIOT.2023.3234123. [11] YANG Shan, ZHANG Qiyuan, HU Longxing, et al. 5G indoor positioning error correction based on 5G-PECNN[J]. Sensors, 2024, 24(6): 1949. doi: 10.3390/s24061949. [12] GAO Kaixuan, WANG Huiqiang, LV Hongwu, et al. Localization-oriented digital twinning in 6G: A new indoor-positioning paradigm and proof-of-concept[J]. IEEE Transactions on Wireless Communications, 2024, 23(8): 10473–10486. doi: 10.1109/TWC.2024.3373034. [13] CAROTENUTO R, IERO D, and MERENDA M. A method for correcting signal aberrations in ultrasonic indoor positioning[J]. Sensors, 2024, 24(6): 2017. doi: 10.3390/s24062017. [14] DELABIE D, WILDING T, VAN DER PERRE L, et al. Anchor layout optimization for ultrasonic indoor positioning using swarm intelligence[C]. 2023 13th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nuremberg, Germany, 2023: 1–6. doi: 10.1109/IPIN57070.2023.10332490. [15] SANDAMINI C, MADURANGA M W P, TILWARI V, et al. A review of indoor positioning systems for UAV localization with machine learning algorithms[J]. Electronics, 2023, 12(7): 1533. doi: 10.3390/electronics12071533. [16] SHI Tianwei, CHANG Guangming, QIANG Jiaofeng, et al. Brain computer interface system based on monocular vision and motor imagery for UAV indoor space target searching[J]. Biomedical Signal Processing and Control, 2023, 79: 104114. doi: 10.1016/j.bspc.2022.104114. [17] WU Yuan, CHEN Ruizhi, FU Wenju, et al. CWIWD-IPS: A crowdsensing/walk-surveying inertial/Wi-Fi data-driven indoor positioning system[J]. IEEE Internet of Things Journal, 2023, 10(10): 8786–8798. doi: 10.1109/JIOT.2022.3232817. [18] HAN Chunhua, XUE Shunbiao, LONG Li, et al. Research on inertial navigation and environmental correction indoor ultra-wideband ranging and positioning methods[J]. Sensors, 2024, 24(1): 261. doi: 10.3390/s24010261. [19] KUO Y H and WU E H K. Intelligent geomagnetic indoor positioning system[J]. Electronics, 2023, 12(10): 2227. doi: 10.3390/electronics12102227. [20] KIM H, LEE C, KIM H, et al. Application of geomagnetic field-based indoor positioning technology in the formwork stage[C]. The Korean Institute of Building Construction Conference, 2023: 213–214. [21] WANG Tianfa, HAN Litao, KONG Qiaoli, et al. An improved particle filter indoor fusion positioning approach based on Wi-Fi/PDR/geomagnetic field[J]. Defence Technology, 2024, 32: 443–458. doi: 10.1016/j.dt.2023.03.021. [22] JING Hao, GAO Yang, SHAHBEIGI S, et al. Integrity monitoring of GNSS/INS based positioning systems for autonomous vehicles: State-of-the-art and open challenges[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 14166–14187. doi: 10.1109/TITS.2022.3149373. [23] ZHU Ni, BETAILLE D, MARAIS J, et al. GNSS integrity monitoring schemes for terrestrial applications in harsh signal environments[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 12(3): 81–91. doi: 10.1109/MITS.2020.2994076. [24] STALLO C, NERI A, SALVATORI P, et al. GNSS integrity monitoring for rail applications: Two-tiers method[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 55(4): 1850–1863. doi: 10.1109/TAES.2018.2876735. [25] BIJJAHALLI S and SABATINI R. A high-integrity and low-cost navigation system for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 22(1): 356–369. doi: 10.1109/TITS.2019.2957876. [26] LIAO Maoyou, LIU Jiacheng, MENG Ziyang, et al. A SINS/SAR/GPS fusion positioning system based on sensor credibility evaluations[J]. Remote Sensing, 2021, 13(21): 4463. doi: 10.3390/rs13214463. [27] 闫伟. 行人室内高维磁场指纹匹配定位系统及其完好性研究[D]. [硕士论文], 武汉大学, 2020. doi: 10.27379/d.cnki.gwhdu.2020.001033.YAN Wei. Research on pedestrian indoor high-dimensional magnetic fingerprint matching positioning system and its integrity[D]. [Master dissertation], Wuhan University, 2020. doi: 10.27379/d.cnki.gwhdu.2020.001033. [28] 王荣鑫. 视觉惯导融合定位及完好性系统设计[D]. [硕士论文], 厦门大学, 2019.WANG Rongxin. Visual inertial navigation fusion location and integrity system design[D]. [Master dissertation], Xiamen University, 2019. [29] ZHAO Yinzhi, GUO Jiming, ZOU Jingui, et al. A holistic approach to guarantee the reliability of positioning based on carrier phase for indoor pseudolite[J]. Applied Sciences, 2020, 10(4): 1199. doi: 10.3390/app10041199. [30] 陈瑞, 赵龙, 范紫月. 地形辅助导航多模式综合完好性监测方法[J]. 中国惯性技术学报, 2023, 31(11): 1157–1166. doi: 10.13695/j.cnki.12-1222/o3.2023.11.012.CHEN Rui, ZHAO Long, and FAN Ziyue. A Multi-mode comprehensive integrity monitoring method for terrain aided navigation[J]. Journal of Chinese Inertial Technology, 2023, 31(11): 1157–1166. doi: 10.13695/j.cnki.12-1222/o3.2023.11.012. -

 下载:
下载:












图(13) / 表(4)
计量
- 文章访问数: 801
- HTML全文浏览量: 666
- PDF下载量: 65
- 被引次数: 0
