

RIS-Assisted ISAC with Non-orthogonal Multiple Access Transmission and Resource Allocation Optimization in Vehicular Networks
-
摘要: 为应对6G密集城市环境下车联网(V2X)通信和传感路径受限问题,该文提出了一种基于可重构智能超表面(RIS)辅助的通感一体化(ISAC) V2X系统框架。针对非视距(NLOS)下的车辆移动性,采用扩展卡尔曼滤波(EKF)算法,结合ISAC回波信号中的实时信道状态信息(CSI),实现对移动车辆位置的跟踪与预测。该文提出基于非正交多址接入技术(NOMA)的多车辆间功率分配优化方案,在保证感知精度的同时提升下行链路通信总速率,并引入Karush-Kuhn-Tucker(KKT)条件作为反馈机制,避免陷入局部最优。仿真结果表明,所提系统在通信性能和感知性能方面优于传统的RIS辅助ISAC-V2X系统。Abstract:
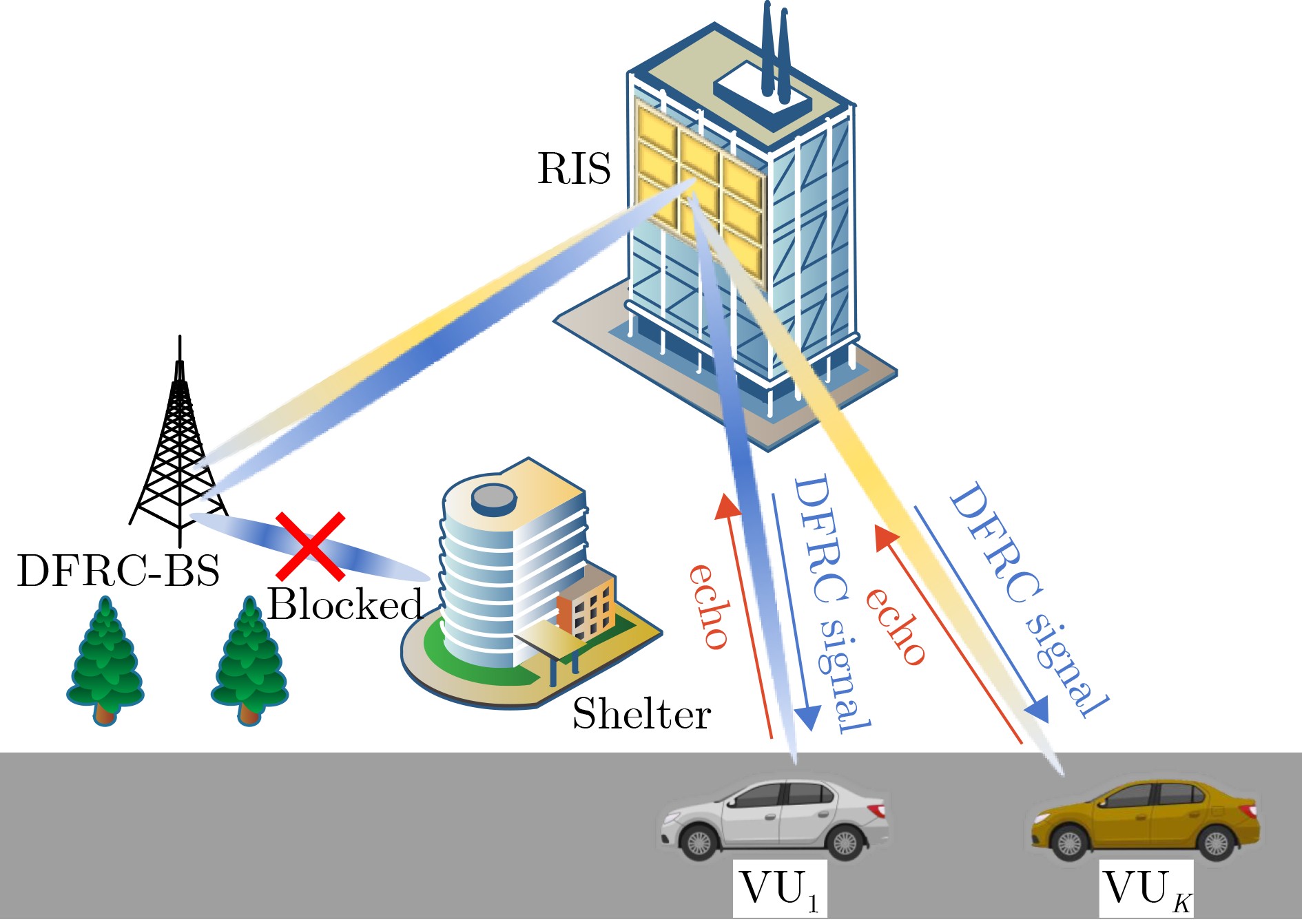
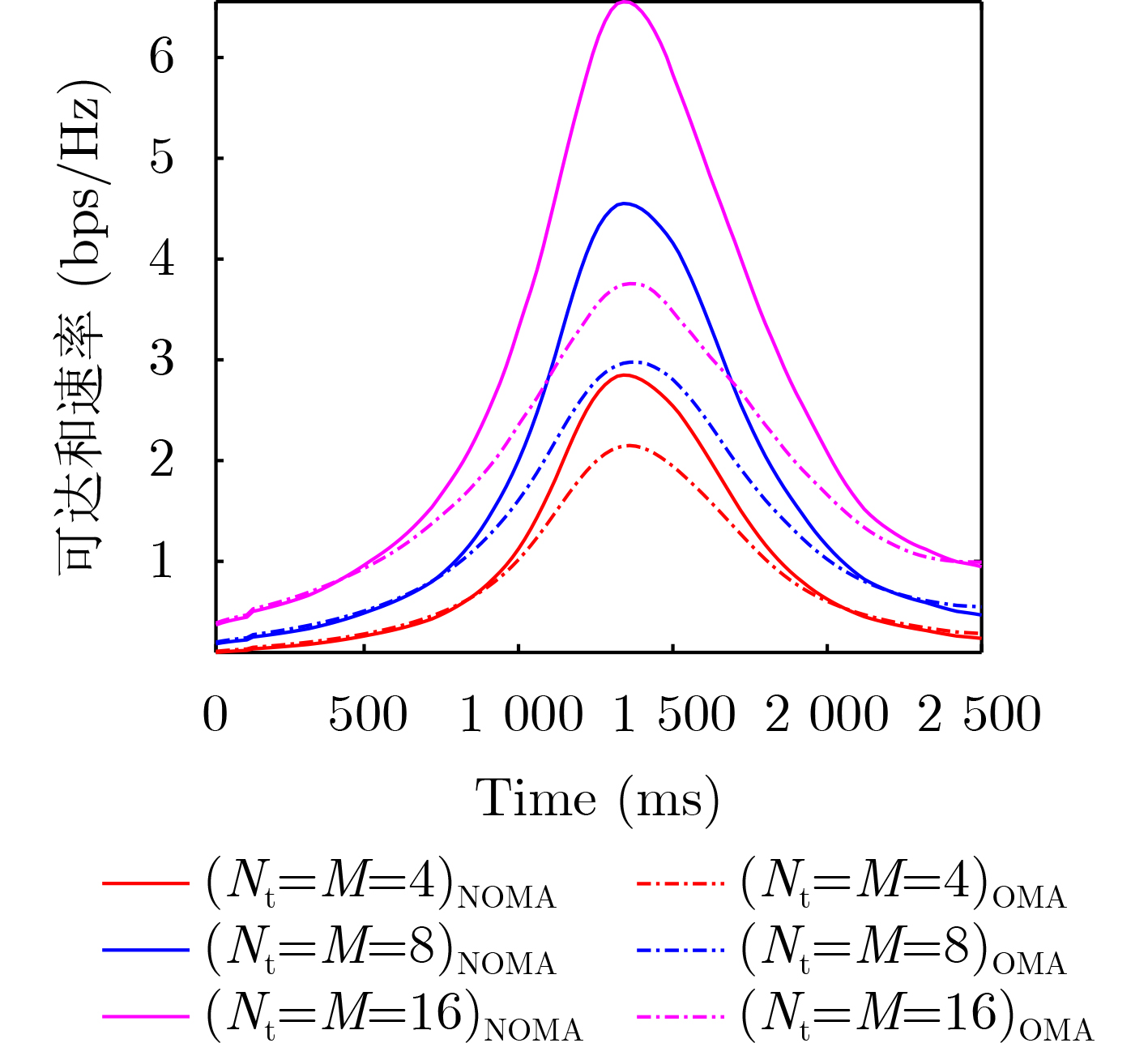
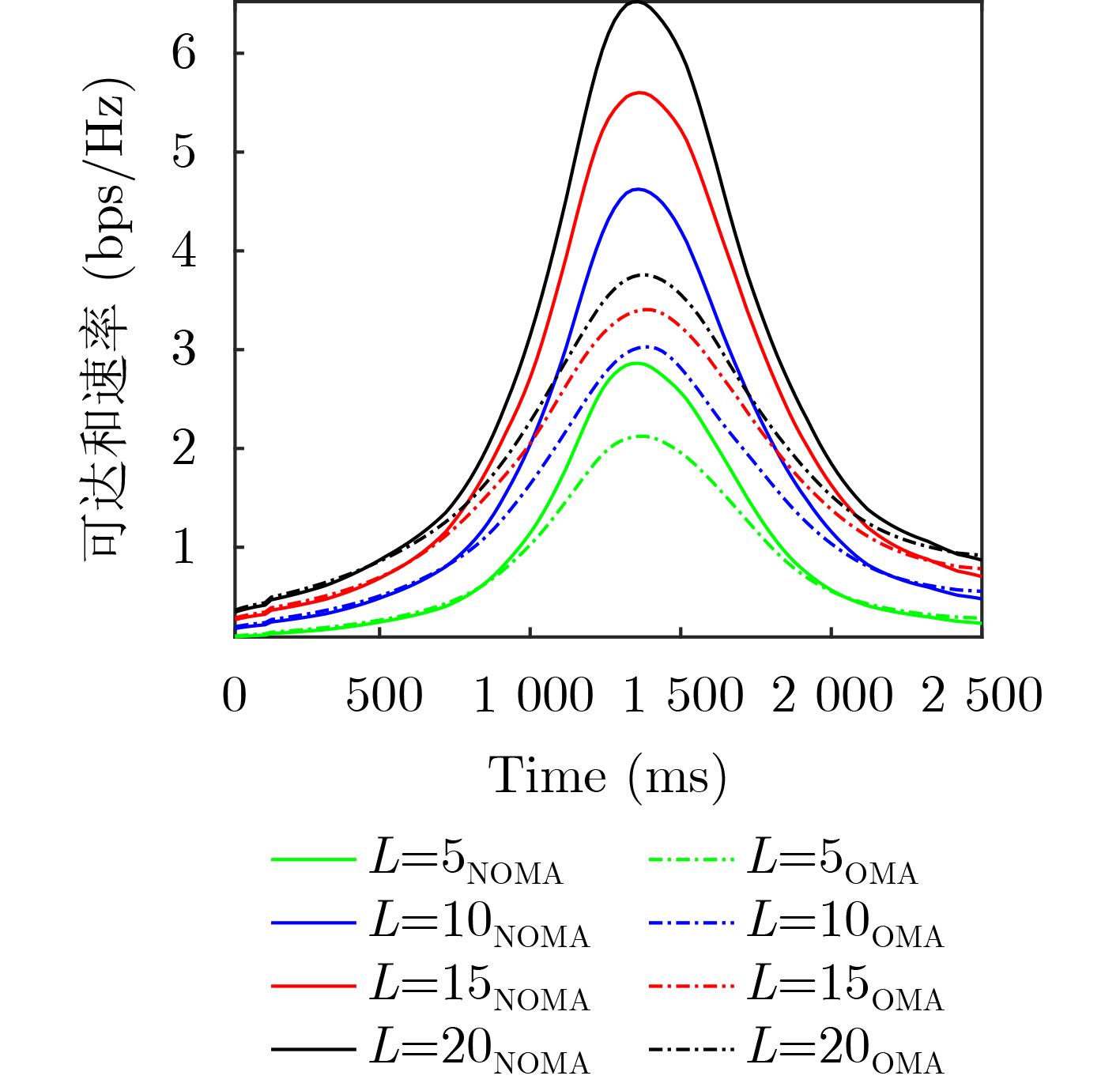
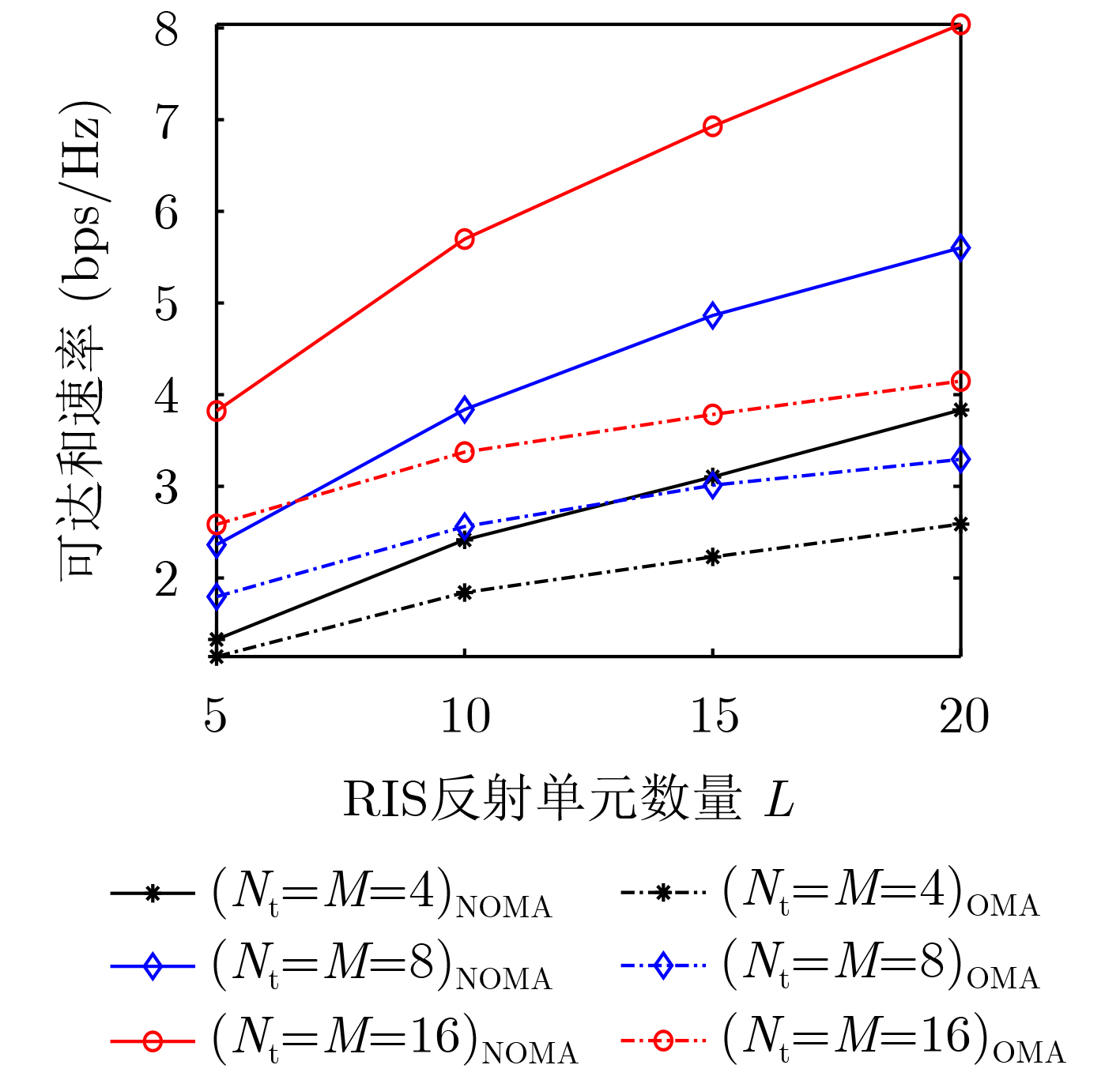
Objective To address the issue of limited V2X communication and sensing paths in 6G dense urban environments, an RIS-assisted ISAC-V2X system framework is proposed. Considering vehicle mobility under Non-Line-of-Sight (NLOS) conditions, the Extended Kalman Filter (EKF) algorithm is utilized to track and predict the positions of moving vehicles by combining real-time Channel State Information (CSI) from the ISAC echo signals. A multi-vehicle power allocation optimization scheme based on Non-Orthogonal Multiple Access (NOMA) is introduced to enhance the downlink communication sum rate while maintaining sensing accuracy. The Karush-Kuhn-Tucker (KKT) conditions are incorporated as a feedback mechanism to prevent the system from converging to a local optimum. Simulation results demonstrate that the proposed system outperforms the traditional RIS-assisted ISAC-V2X system in terms of both communication and sensing performance. Methods This study establishes an RIS-assisted ISAC-V2X-NOMA system model. Considering vehicle mobility in NLOS conditions, the EKF algorithm is employed to track and predict vehicle locations base on real-time CSI from the ISAC signals. Subsequently, a multi-vehicle power allocation optimization scheme based on NOMA is proposed, with the KKT conditions introduced to avoid local optima and ensure global optimality. To comprehensively evaluate channel estimation performance, 1000 Monte Carlo simulations are conducted, and performance analyses are carried out on MATLAB with comparisons to traditional RIS-assisted ISAC-V2X systems under different scenarios, ultimately validating the superiority of the proposed system.Results and Discussions The sensor tracking performance of the proposed system is presented, which indicate that the introduction of RIS significantly improves the angle and distance tracking accuracy. As the number of RIS reflection elements increases, the system’s Root Mean Square Error (RMSE) decreases, validating the effectiveness of RIS in complex dynamic environments. Then, the communication performance analysis between the proposed system and the traditional system under different antenna configurations is presented, where one can observe that the communication sum rate increases as the vehicle approaches the RIS surface and decreases as it moves away, which can be also improved by increasing the number of antennas. In dense environments with limited resources, the proposed system obviously outperforms the traditional system in terms of communication sum rate under the same RIS configuration. Finally, one can also observe that power allocation optimization using NOMA allows more efficient resource management and reduced inter-user interference, further improving communication rates. These results demonstrate the significant advantages of the proposed system in terms of both communication and sensing performance in V2X systems. Conclusions This paper proposes an RIS-assisted ISAC-V2X-NOMA system framework. By utilizing RIS to dynamically adjust the propagation path of ISAC signals and designing an EKF-based vehicle tracking and prediction method, efficient real-time vehicle sensing and communication are achieved. Furthermore, a multi-vehicle power allocation optimization scheme based on NOMA is proposed to enhance communication rate and resource utilization. The results suggest that the proposed system not only reduces pilot signal overhead but also enhances the overall system performance. -
1 车辆功率分配算法流
输入:用户数$K$、信噪比${{\mathrm{SINR}}_{k,n}}$、总发射功率${P_{\mathrm{T}}}$、噪声功率
$\sigma _{\mathrm{c}}^2$、角度约束${\varepsilon _\theta }$、距离约束${\varepsilon _d}$。输出:每个用户的最优功率分配${\rho _{k,n}}$。 步骤1 定义目标函数$\max \;f\left( {\boldsymbol{\rho }}\right)$。 步骤2 构造拉格朗日函数$ L\left( {{\boldsymbol{\rho }},\xi ,\eta ,{\nu _\theta },{\nu _d}} \right) $。 步骤3 导出KKT条件方程组。 步骤4 使用CVX工具箱求解目标函数$\min \; - f\left( {\boldsymbol{\rho }}\right)$。 步骤5 验证解决方案的KKT条件,
若满足,输出最优功率分配,
否则,重复步骤2~步骤4。步骤6 输出用户的最优功率分配${\rho _{k,n}}$。  下载: 导出CSV
下载: 导出CSV
-
[1] ZHU Yishi, MAO Bomin, KAWAMOTO Y, et al. Intelligent reflecting surface-aided vehicular networks toward 6G: Vision, proposal, and future directions[J]. IEEE Vehicular Technology Magazine, 2021, 16(4): 48–56. doi: 10.1109/MVT.2021.3113890. [2] LI Meiling, XUE Kaixuan, CHEN Wei, et al. Secure performance of RIS-Aided NOMA in cognitive V2X networks with imperfect CSI over double Rayleigh fading[J]. IEEE Transactions on Cognitive Communications and Networking, 2024, 10(4): 1339–1355. doi: 10.1109/TCCN.2024.3365704. [3] LI Meiling, CAO Guomei, EI BOUANANI F, et al. Error performance of NOMA system with outdated, imperfect CSI, and RHI over α−μ fading channels[J]. IEEE Transactions on Vehicular Technology, 2024, 73(2): 2142–2155. doi: 10.1109/TVT.2023.3315119. [4] DEHKORDI S K, GAUDIO L, KOBAYASHI M, et al. Beam-space MIMO radar for joint communication and sensing with OTFS modulation[J]. IEEE Transactions on Wireless Communications, 2023, 22(10): 6737–6749. doi: 10.1109/TWC.2023.3245207. [5] MENG Xiao, LIU Fan, MASOUROS C, et al. Vehicular connectivity on complex trajectories: Roadway-geometry aware ISAC beam-tracking[J]. IEEE Transactions on Wireless Communications, 2023, 22(11): 7408–7423. doi: 10.1109/TWC.2023.3250442. [6] SHAHAM S, DING M, KOKSHOORN M, et al. Fast channel estimation and beam tracking for millimeter wave vehicular communications[J]. IEEE Access, 2019, 7: 141104–141118. doi: 10.1109/ACCESS.2019.2944308. [7] 林粤伟, 王溢, 张奇勋, 等. 面向6G的通信感知一体化车联网研究综述[J]. 信号处理, 2023, 39(6): 963–974. doi: 10.16798/j.issn.1003-0530.2023.06.002.LIN Yuewei, WANG Yi, ZHANG Qixun, et al. Overview of the research on 6G oriented internet of vehicles for integrated sensing and communication[J]. Journal of Signal Processing, 2023, 39(6): 963–974. doi: 10.16798/j.issn.1003-0530.2023.06.002. [8] LIU Fan, YUAN Weijie, MASOUROS C, et al. Radar-assisted predictive beamforming for vehicular links: Communication served by sensing[J]. IEEE Transactions on Wireless Communications, 2020, 19(11): 7704–7719. doi: 10.1109/TWC.2020.3015735. [9] YUAN Weijie, LIU Fan, MASOUROS C, et al. Bayesian predictive beamforming for vehicular networks: A low-overhead joint radar-communication approach[J]. IEEE Transactions on Wireless Communications, 2021, 20(3): 1442–1456. doi: 10.1109/TWC.2020.3033776. [10] LIU Chang, YUAN Weijie, LI Shuangyang, et al. Predictive beamforming for integrated sensing and communication in vehicular networks: A deep learning approach[C]. ICC 2022 - IEEE International Conference on Communications, Seoul, Korea, Republic of, 2022: 1948–1954. doi: 10.1109/ICC45855.2022.9839000. [11] WU Qingqing and ZHANG Rui. Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network[J]. IEEE Communications Magazine, 2020, 58(1): 106–112. doi: 10.1109/MCOM.001.1900107. [12] WU Qingqing and ZHANG Rui. Intelligent reflecting surface enhanced wireless network: Joint active and passive beamforming design[C]. 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 2018: 1–6. doi: 10.1109/GLOCOM.2018.8647620. [13] SAIKIA P, PALA S, SINGH K, et al. Proximal policy optimization for RIS-assisted full duplex 6G-V2X communications[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(7): 5134–5149. doi: 10.1109/TIV.2023.3275632. [14] 张志龙, 谢文婷, 李雪菲, 等. 面向车联网的通信感知一体化资源分配算法[J]. 北京邮电大学学报, 2023, 46(6): 55–60. doi: 10.13190/j.jbupt.2022-242.ZHANG Zhilong, XIE Wenting, LI Xuefei, et al. Communication-sensing integrated resource allocation algorithm in vehicular networks[J]. Journal of Beijing University of Posts and Telecommunications, 2023, 46(6): 55–60. doi: 10.13190/j.jbupt.2022-242. [15] HAZARIKA B, SINGH K, BISWAS S, et al. Multi-agent DRL-based task offloading in multiple RIS-aided IoV networks[J]. IEEE Transactions on Vehicular Technology, 2024, 73(1): 1175–1190. doi: 10.1109/TVT.2023.3302010. [16] ZUO Jiakuo and LIU Yuanwei. Reconfigurable intelligent surface assisted NOMA empowered integrated sensing and communication[C]. 2022 IEEE Globecom Workshops (GC Wkshps), Rio de Janeiro, Brazil, 2022: 1028–1033. doi: 10.1109/GCWkshps56602.2022.10008704. [17] LI Meiling, XUE Peng, YUAN Hu, et al. Physical layer security for CR-NOMA network with cooperative jamming[J]. Tsinghua Science and Technology, 2025, 30(2): 708–720. doi: 10.26599/TST.2023.9010128. [18] LI Meiling, REN Kang, EI BOUANANI F, et al. Secure performance of RIS-NOMA system under κ-μ shadowed fading channel[J]. IEEE Wireless Communications Letters, 2024, 13(12): 3543–3547. doi: 10.1109/LWC.2024.3476951. [19] MLIKA Z and CHERKAOUI S. Deep deterministic policy gradient to minimize the age of information in cellular V2X communications[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 23597–23612. doi: 10.1109/TITS.2022.3190799. [20] KHAN W U, JAMSHED M A, LAGUNAS E, et al. Energy efficiency optimization for backscatter enhanced NOMA cooperative V2X communications under imperfect CSI[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(11): 12961–12972. doi: 10.1109/TITS.2022.3187567. -

 下载:
下载:





图(7) / 表(2)
计量
- 文章访问数: 793
- HTML全文浏览量: 373
- PDF下载量: 128
- 被引次数: 0
