

Extended Target Tracking Method under Non-stationary Abnormal Noise Conditions
-
摘要: 针对非平稳异常噪声环境下扩展目标跟踪问题,该文提出一种基于高斯-学生t混合(GSTM)扩展目标跟踪方法。首先,将过程噪声和量测噪声建模为GSTM分布,以表征非平稳厚尾噪声,并通过引入伯努利随机变量,将目标的运动状态和量测似然函数建模为分层高斯形式。其次,在随机矩阵(RMM)滤波框架下,使用变分贝叶斯方法详细推导了非平稳厚尾噪声下的GSTM扩展目标跟踪算法。该算法通过建模高斯噪声与厚尾噪声之间的非平稳过程,精确表征噪声特性,从而在非平稳异常噪声环境下稳健捕捉扩展目标的质心位置和轮廓形态。最后,构建非平稳异常噪声环境下的扩展目标跟踪仿真实验,并通过高斯-瓦瑟斯坦距离对实验结果进行效果评估,验证了所提出算法的合理性。此外,真实场景实验结果进一步证明了该算法在实际应用中的有效性和鲁棒性。
-
关键词:
- 扩展目标跟踪 /
- 随机矩阵 /
- 高斯-学生t混合分布 /
- 变分贝叶斯方法
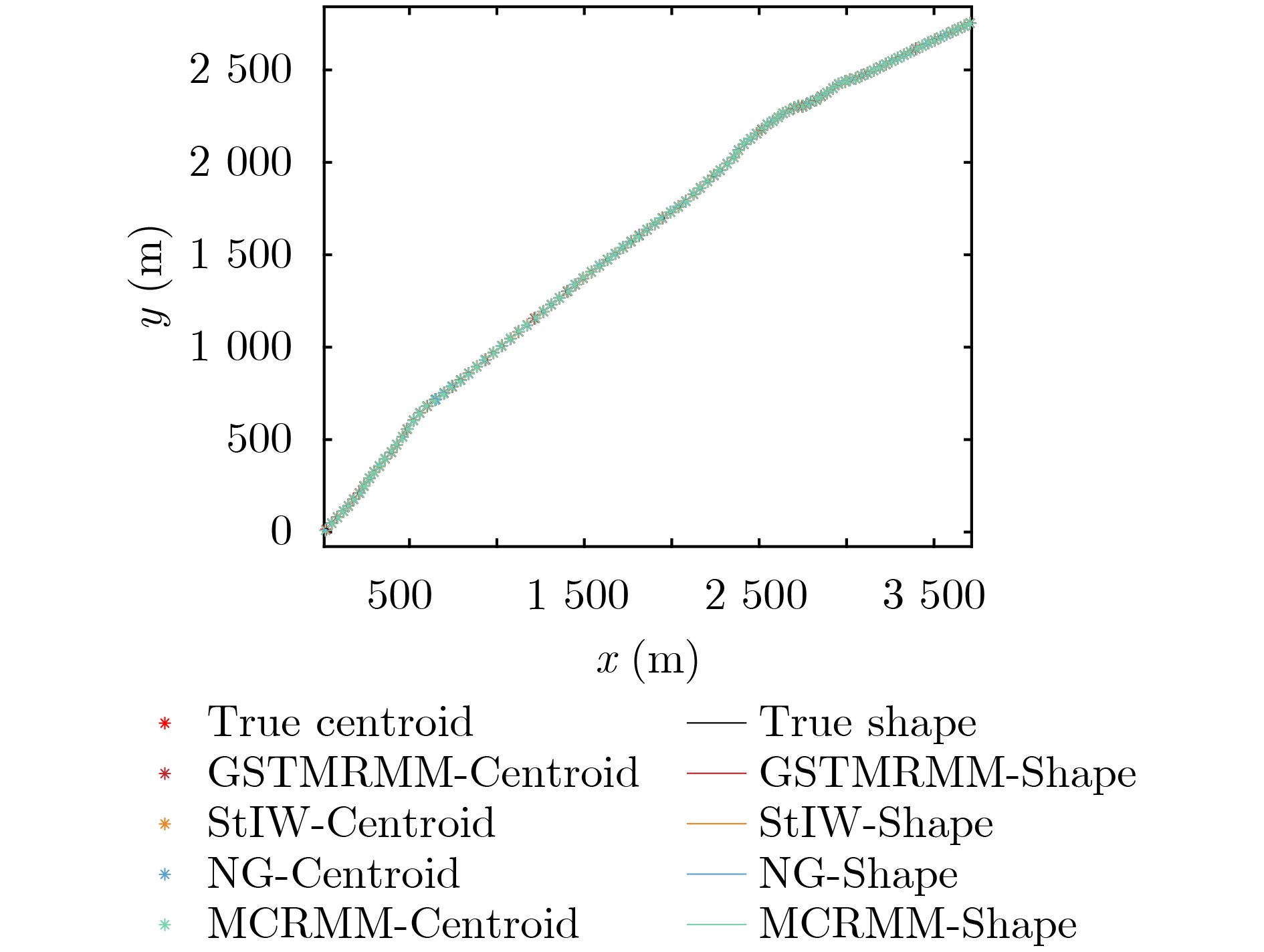
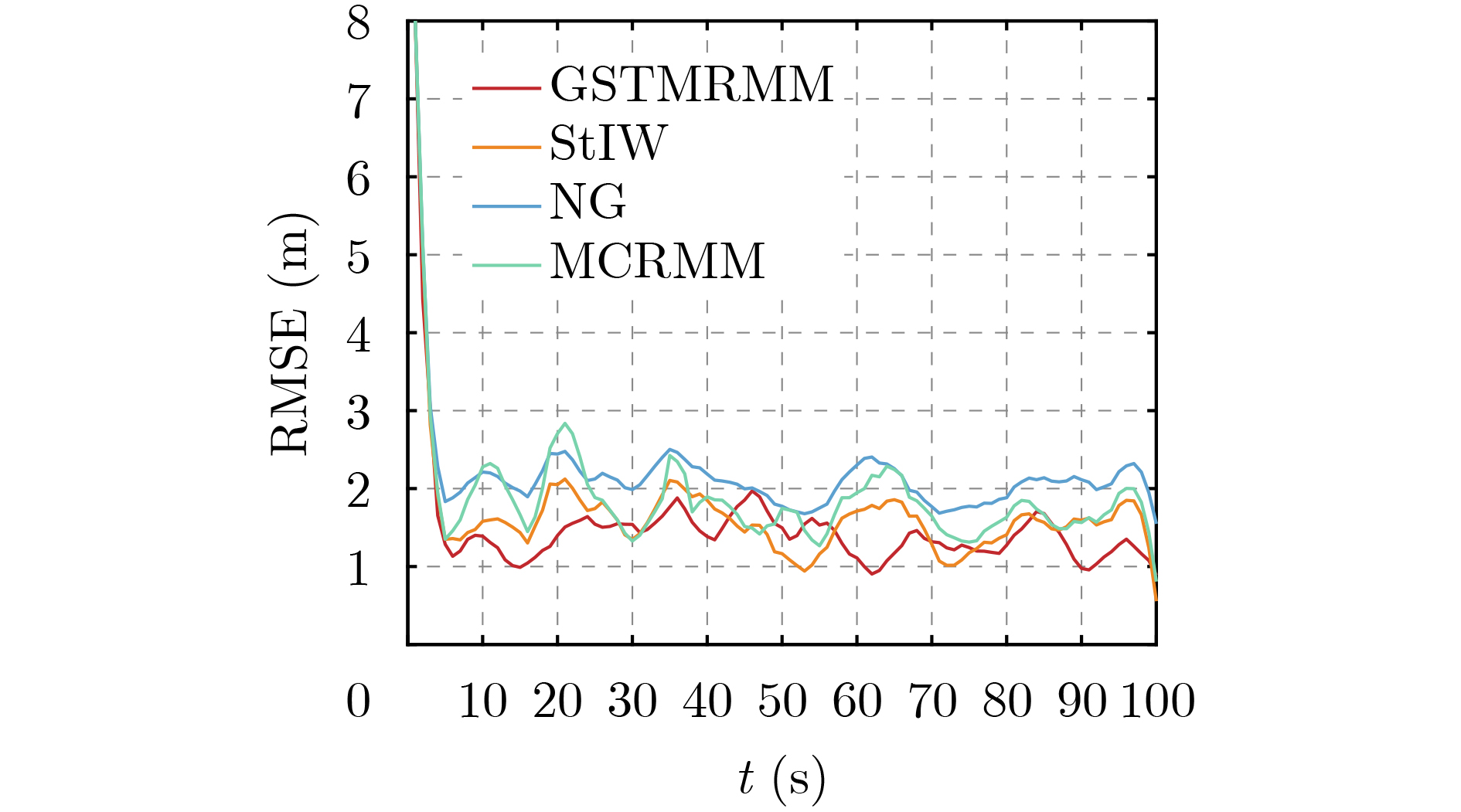
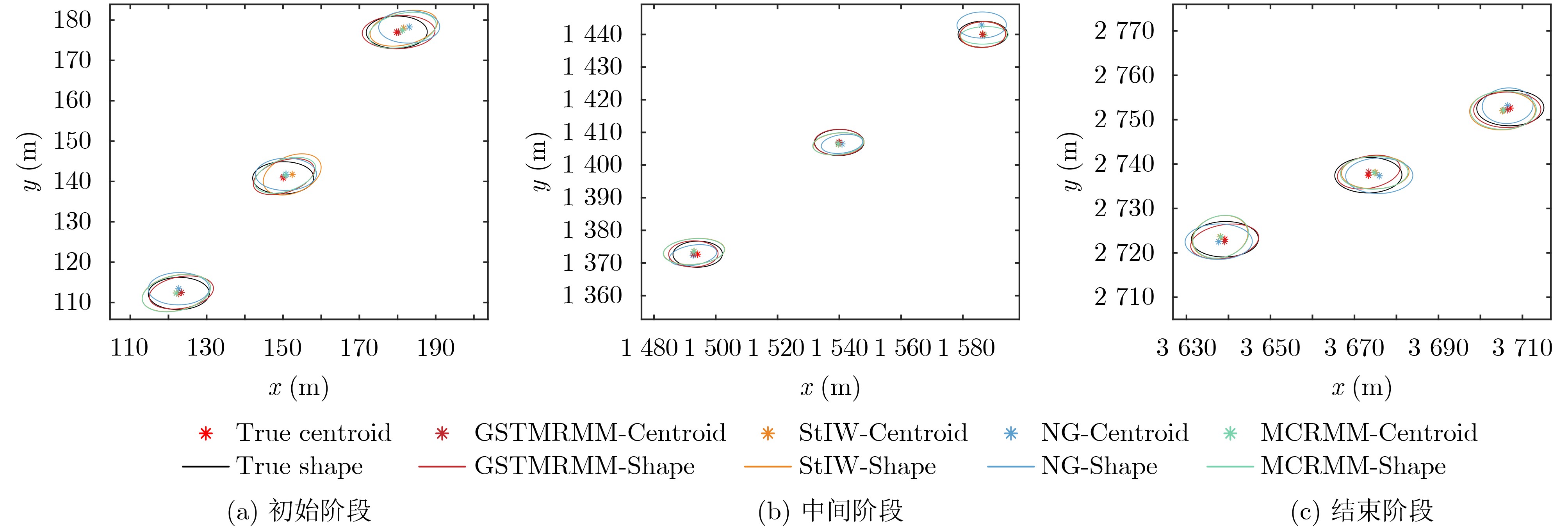
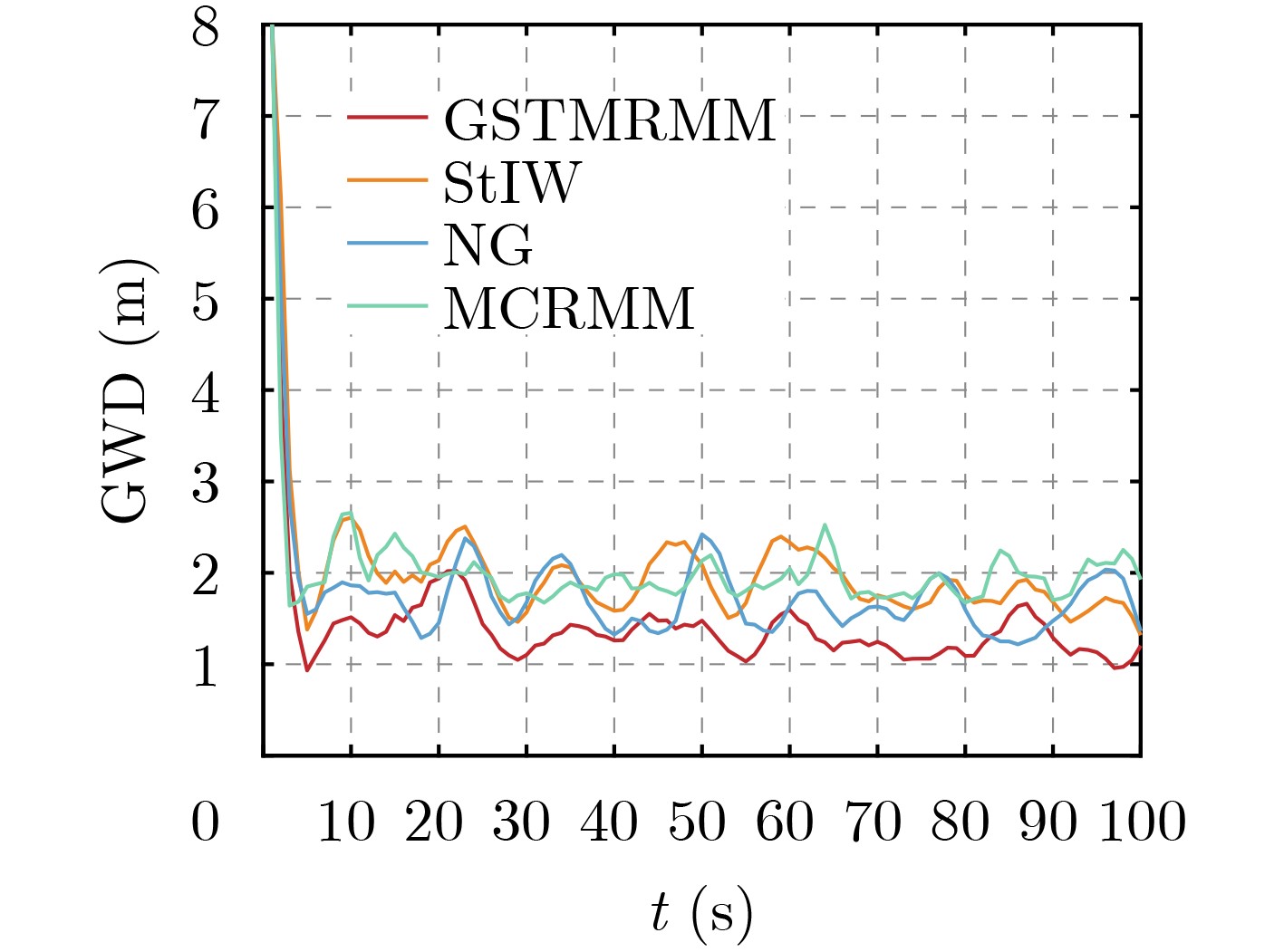
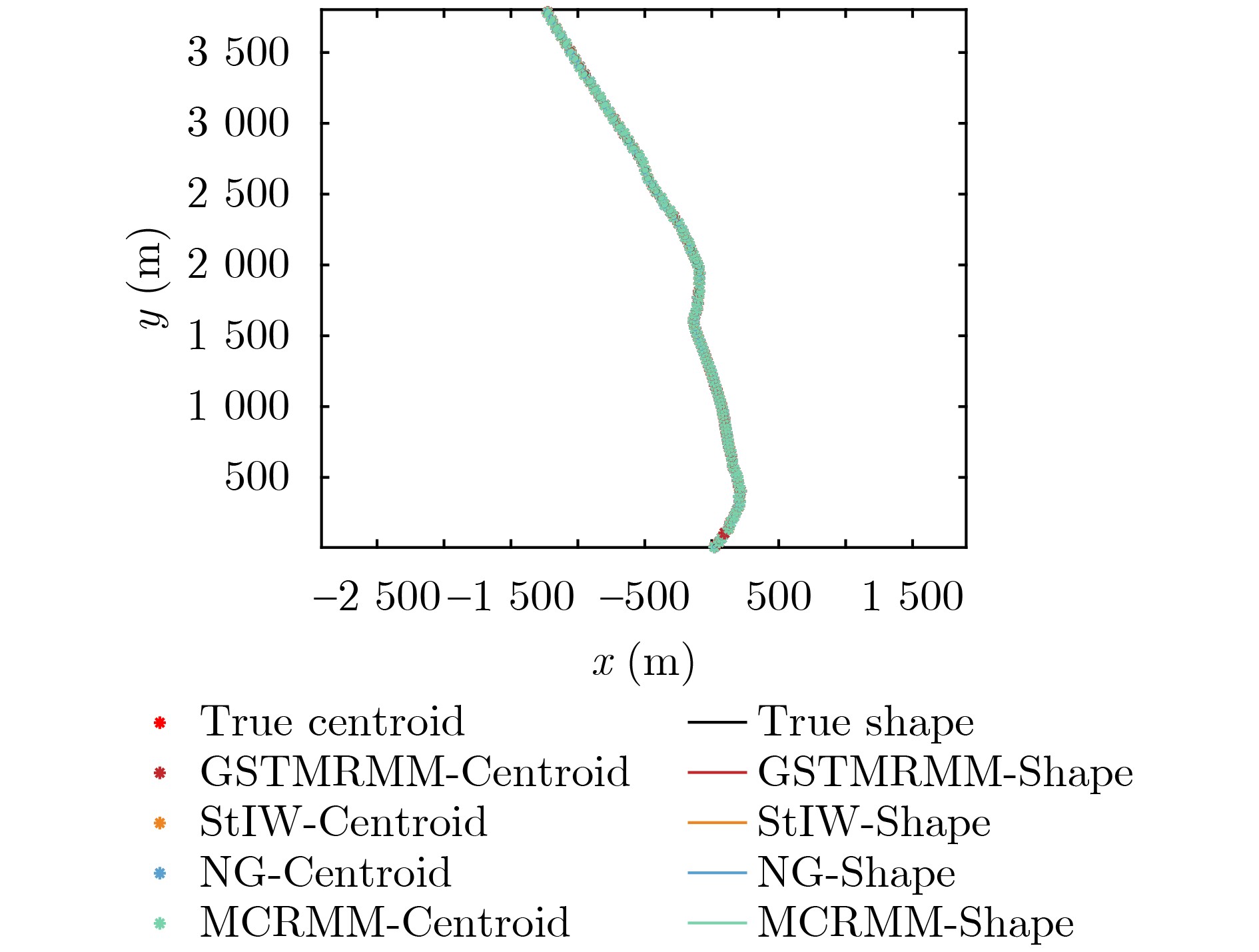
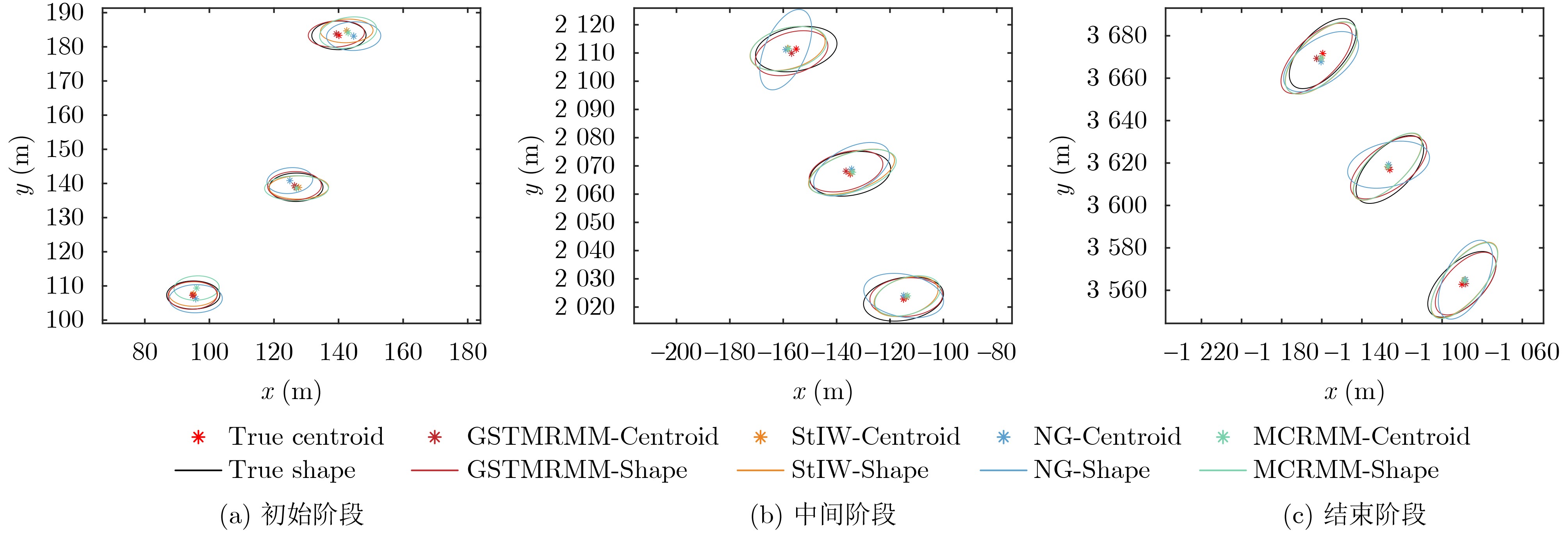
Abstract:Objective This paper addresses the problem of extended target tracking in the presence of non-stationary abnormal noise. Traditional Gaussian extended target filters and Student’s t filters rely on the assumption of stationary noise distributions, which limits their performance in environments with non-stationary abnormal noise. Non-stationary noise, common in practical applications, is especially prevalent in complex environments where the noise frequently shifts between Gaussian and heavy-tailed distributions. To overcome this challenge, a Gaussian-Student’s t Mixture (GSTM) distribution is proposed for modeling non-stationary abnormal noise in extended target tracking. The GSTM distribution is used to model the noise accurately, and a filter is developed to track the target’s kinematic state and shape effectively under non-stationary measurement and process noise conditions. This method is shown to be robust in complex environments, offering enhanced accuracy, robustness, and applicability for extended target tracking. Methods The GSTM distribution is employed to model both process and measurement noise, enabling dynamic adjustment of mixture parameters to capture the evolving characteristics of noise distributions in non-stationary environments. To optimize computation, Bernoulli random variables are introduced, and the target’s one-step prediction and measurement likelihood functions are reformulated as a hierarchical Gaussian model based on the GSTM distribution. This approach facilitates adaptive switching between Gaussian and Student’s t distributions, streamlining the inference process and simplifying posterior computation, which reduces the complexity of parameter estimation. Within the Random Matrix Model (RMM) framework, Variational Bayesian (VB) inference is applied to jointly estimate the target’s kinematic state, extension state, mixture parameters, and noise characteristics. During the filtering update phase, a dynamic adjustment mechanism is introduced for the one-step prediction error covariance matrix and observation noise covariance matrix, ensuring the model to maintain robustness and adaptability in complex, non-stationary noise environments. Results and Discussions The introduction of the GSTM distribution for modeling non-stationary abnormal noise enables robust tracking of both the centroid and shape contour of extended targets in such environments. Theoretical derivations and experimental validations confirm the effectiveness of the proposed method for single extended target tracking under non-stationary noise conditions. Simulation and real-world results demonstrate significant performance advantages. First, in terms of tracking accuracy, the proposed algorithm achieves a notably lower Root Mean Square Error (RMSE) for centroid tracking compared to other algorithms ( Fig. 2 ,Fig. 6 ), effectively adapting to dynamic changes in non-stationary noise, and offering superior accuracy and stability. Second, for adaptive estimation of target shape, the algorithm shows considerable improvements in non-stationary noise environments, providing more accurate contour estimation (Fig. 3 ,Fig. 7 ). It also maintains high robustness under evolving target shapes. Moreover, the algorithm exhibits faster convergence and greater stability in complex environments (Fig. 2 ,Fig. 4 ), with a significantly lower Gaussian Wasserstein Distance (GWD) mean compared to other methods (Fig. 4 ,Fig. 8 ). In practical experiments, a vehicle operated in environments with obstacles like tree branches, where the noise is non-stationary, further validated the algorithm’s performance. Under these conditions, the proposed algorithm demonstrated exceptional stability and robustness throughout the tracking process (Fig. 9 ), outperforming other algorithms and highlighting its adaptability and reliability in complex dynamic environments.Conclusions This paper proposes an extended target tracking method based on the GSTM distribution, overcoming the limitations of traditional algorithms in adapting to non-stationary anomalous noise environments. The GSTM distribution is used for noise modeling, combined with the RMM framework, and the VB method along with hierarchical Gaussian modeling simplifies the computational process, enhancing the algorithm’s adaptability and robustness. Experimental results across shape-invariant, shape-evolving, and real-world scenarios demonstrate the following: (1) The proposed algorithm significantly outperforms existing methods in robustness, particularly in centroid tracking and shape estimation. (2) The noise model is adaptively adjusted under non-stationary noise and dynamic target evolution, enabling high-precision tracking of extended targets. (3) In complex real-world scenarios, the algorithm successfully tracks small vehicles, further validating its effectiveness in practical applications. Future research could explore integrating multi-target tracking theories, extending the algorithm to multi-extended target tracking scenarios, and addressing more complex environmental challenges to further enhance its practicality and performance in multi-target settings. -
[1] JIANG Meiqiu, GUO Shisheng, LUO Haolan, et al. A robust target tracking method for crowded indoor environments using mmWave radar[J]. Remote Sensing, 2023, 15(9): 2425. doi: 10.3390/rs15092425. [2] ZHANG Jiwei, BHUIYAN M Z A, YANG Yu, et al. Trustworthy target tracking with collaborative deep reinforcement learning in EdgeAI-Aided IoT[J]. IEEE Transactions on Industrial Informatics, 2022, 18(2): 1301–1309. doi: 10.1109/TII.2021.3098317. [3] YANG Dongsheng, GUO Yunfei, YIN Tianxiang, et al. Cost-effective Gaussian processes based extended target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 8282–8296. doi: 10.1109/TAES.2023.3305320. [4] WANG Yi, CHEN Xin, GONG Chao, et al. Non-ellipsoidal infrared group/extended target tracking based on Poisson multi-Bernoulli mixture filter and B-spline[J]. Remote Sensing, 2023, 15(3): 606. doi: 10.3390/rs15030606. [5] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042–1059. doi: 10.1109/TAES.2008.4655362. [6] FELDMANN M, FRANKEN D, and KOCH W. Tracking of extended objects and group targets using random matrices[J]. IEEE Transactions on Signal Processing, 2011, 59(4): 1409–1420. doi: 10.1109/TSP.2010.2101064. [7] LAN Jian and LI X R. Tracking of extended object or target group using random matrix: New model and approach[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(6): 2973–2989. doi: 10.1109/TAES.2016.130346. [8] LAN Jian and LI X R. Tracking of extended object or target group using random matrix — part II: Irregular object[C]. 2012 15th International Conference on Information Fusion, Singapore, 2012: 2185–2192. [9] LI Mingkai, LAN Jian, and LI X R. Tracking of elliptical object with unknown but fixed lengths of axes[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(5): 6518–6533. doi: 10.1109/TAES.2023.3276951. [10] THORMANN K and BAUM M. Fusion of elliptical extended object estimates parameterized with orientation and axes lengths[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(4): 2369–2382. doi: 10.1109/TAES.2021.3057651. [11] BAUM M, FAION F, HANEBECK U D. Modeling the target extent with multiplicative noise[C]. 2012 15th International Conference on Information Fusion, Singapore, Singapore, 2012: 2406–2412. [12] BAUM M and HANEBECK U D. Random hypersurface models for extended object tracking[C]. Proceedings of 2009 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Ajman, United Arab Emirates, 2009: 178–183. doi: 10.1109/ISSPIT.2009.5407526. [13] WAHLSTRÖM N and ÖZKAN E. Extended target tracking using Gaussian processes[J]. IEEE Transactions on Signal Processing, 2015, 63(16): 4165–4178. doi: 10.1109/TSP.2015.2424194. [14] 陈辉, 张星星. 基于多伯努利滤波的厚尾噪声条件下多扩展目标跟踪[J]. 自动化学报, 2023, 49(7): 1573–1586. doi: 10.16383/j.aas.c201061.CHEN Hui and ZHANG Xingxing. Multiple extended target tracking in the presence of heavy-tailed noise using multi-Bernoulli filtering method[J]. Acta Automatica Sinica, 2023, 49(7): 1573–1586. doi: 10.16383/j.aas.c201061. [15] 黄伟, 付红坡, 李煜, 等. 一种高斯-重尾切换分布鲁棒卡尔曼滤波器[J]. 哈尔滨工业大学学报, 2024, 56(4): 12–23. doi: 10.11918/202301052.HUANG Wei, FU Hongpo, LI Yu, et al. A Gaussian-heavy-tailed switching distribution robust Kalman filter[J]. Journal of Harbin Institute of Technology, 2024, 56(4): 12–23. doi: 10.11918/202301052. [16] 王国庆, 杨春雨, 马磊, 等. 基于高斯–广义双曲混合分布的非线性卡尔曼滤波[J]. 自动化学报, 2023, 49(2): 448–460. doi: 10.16383/j.aas.c220400.WANG Guoqing, YANG Chunyu, MA Lei, et al. Nonlinear Kalman filter based on Gaussian-generalized-hyperbolic mixing distribution[J]. Acta Automatica Sinica, 2023, 49(2): 448–460. doi: 10.16383/j.aas.c220400. [17] UROOJ A and RADHAKRISHNAN R. Maximum correntropy-based pseudolinear Kalman filter for passive bearings-only target tracking[J]. Control Theory and Technology, 2024, 22(2): 269–281. doi: 10.1007/s11768-024-00212-y. [18] ZHONG Shan, WANG Ziyi, WANG Gang, et al. Robust adaptive filtering based on M-estimation-based minimum error entropy criterion[J]. Information Sciences, 2024, 658: 120026. doi: 10.1016/j.ins.2023.120026. [19] CHEN Badong, DANG Lujuan, GU Yuantao, et al. Minimum error entropy Kalman filter[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(9): 5819–5829. doi: 10.1109/TSMC.2019.2957269. [20] HU Yue and ZHOU Weidong. A novel moving horizon estimation-based robust Kalman filter with heavy-tailed noises[J]. Circuits, Systems, and Signal Processing, 2024, 43(12): 8091–8107. doi: 10.1007/s00034-024-02831-x. [21] HUANG Yulong, ZHANG Yonggang, LI Ning, et al. A novel robust student’s t-based Kalman filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1545–1554. doi: 10.1109/TAES.2017.2651684. [22] HUANG Yulong, ZHANG Yonggang, ZHAO Yuxin, et al. A novel robust Gaussian-student’s I mixture distribution based Kalman filter[J]. IEEE Transactions on Signal Processing, 2019, 67(13): 3606–3620. doi: 10.1109/TSP.2019.2916755. [23] FU Hongpo and CHENG Yongmei. A novel robust Kalman filter based on switching Gaussian-heavy-tailed distribution[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(6): 3012–3016. doi: 10.1109/TCSII.2022.3161263. [24] GILHOLM K, GODSILL S, MASKELL S, et al. Poisson models for extended target and group tracking[C]. SPIE 5913, Signal and Data Processing of Small Targets 2005, San Diego, USA, 2005: 59130R. doi: 10.1117/12.618730. [25] ORGUNER U. A variational measurement update for extended target tracking with random matrices[J]. IEEE Transactions on Signal Processing, 2012, 60(7): 3827–3834. doi: 10.1109/TSP.2012.2192927. [26] CHENG Yuanhao, CAO Yunhe, YEO T S, et al. Variation Bayesian interference for multiple extended targets or unresolved group targets tracking[EB/OL]. https://arxiv.org/abs/2407.15226, 2024. [27] 陈辉, 王莉, 韩崇昭. 基于随机矩阵建模的Student’s t逆Wishart滤波器[J]. 控制理论与应用, 2022, 39(6): 1088–1097. doi: 10.7641/CTA.2022.11108.CHEN Hui, WANG Li, and HAN Chongzhao. Student’s t inverse Wishart filter based on random matrix modeling[J]. Control Theory & Applications, 2022, 39(6): 1088–1097. doi: 10.7641/CTA.2022.11108. -

 下载:
下载:





图(9)
计量
- 文章访问数: 821
- HTML全文浏览量: 481
- PDF下载量: 187
- 被引次数: 0
