

DroneRFb-DIR: An RF Signal Dataset for Non-cooperative Drone Individual Identification
-
摘要: 无人机射频检测是实现非合作无人机管控的手段之一,而基于射频信号的无人机个体识别(DIR)是无人机检测的重要环节。鉴于当前DIR开源数据集缺失,该文公开了一个名为DroneRFb-DIR的无人机射频信号数据集。该数据集使用软件无线电设备采集无人机与遥控器间通信的射频信号,包含城市场景下的无人机种类共6类(每类无人机各包含3架不同个体)以及1类背景参考信号。采样信号存储为最原始的I/Q数据,每类数据包含不少于40个片段,每个片段包含不少于4 M个采样点。信号采集范围为2.4~2.48 GHz,包含无人机飞控信号、图传信号以及周围干扰设备的信号。该数据集包含详细的个体编号和视距或非视距场景标注,并已划分训练集与测试集,以便于用户进行识别算法验证和性能对比分析。与此同时,该文提供了一种基于快速频率估计和时域相关分析的无人机个体识别方法,并在该数据集上验证了所提方法的有效性。Abstract:
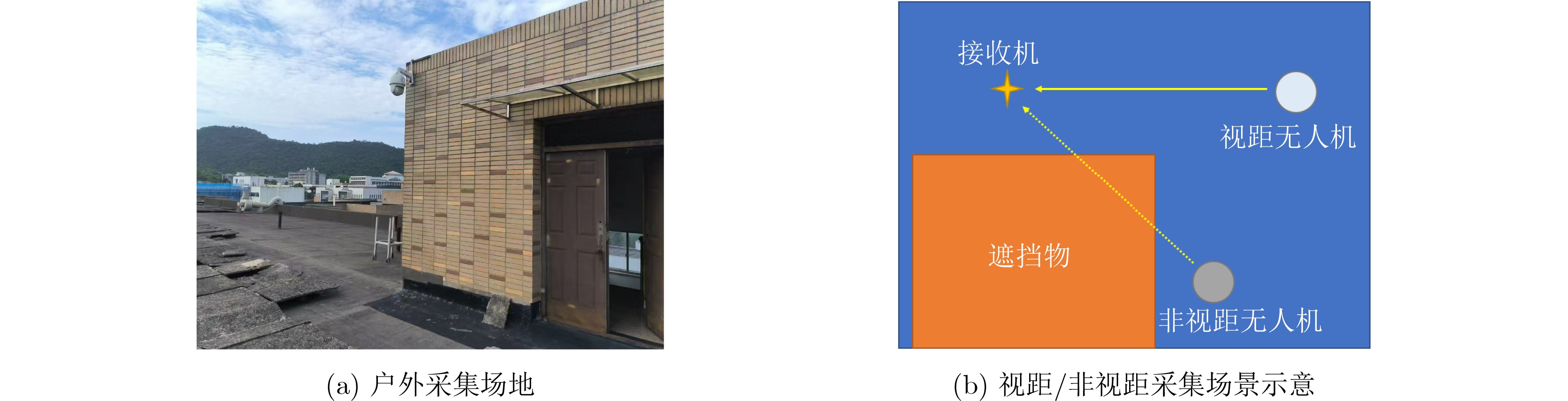
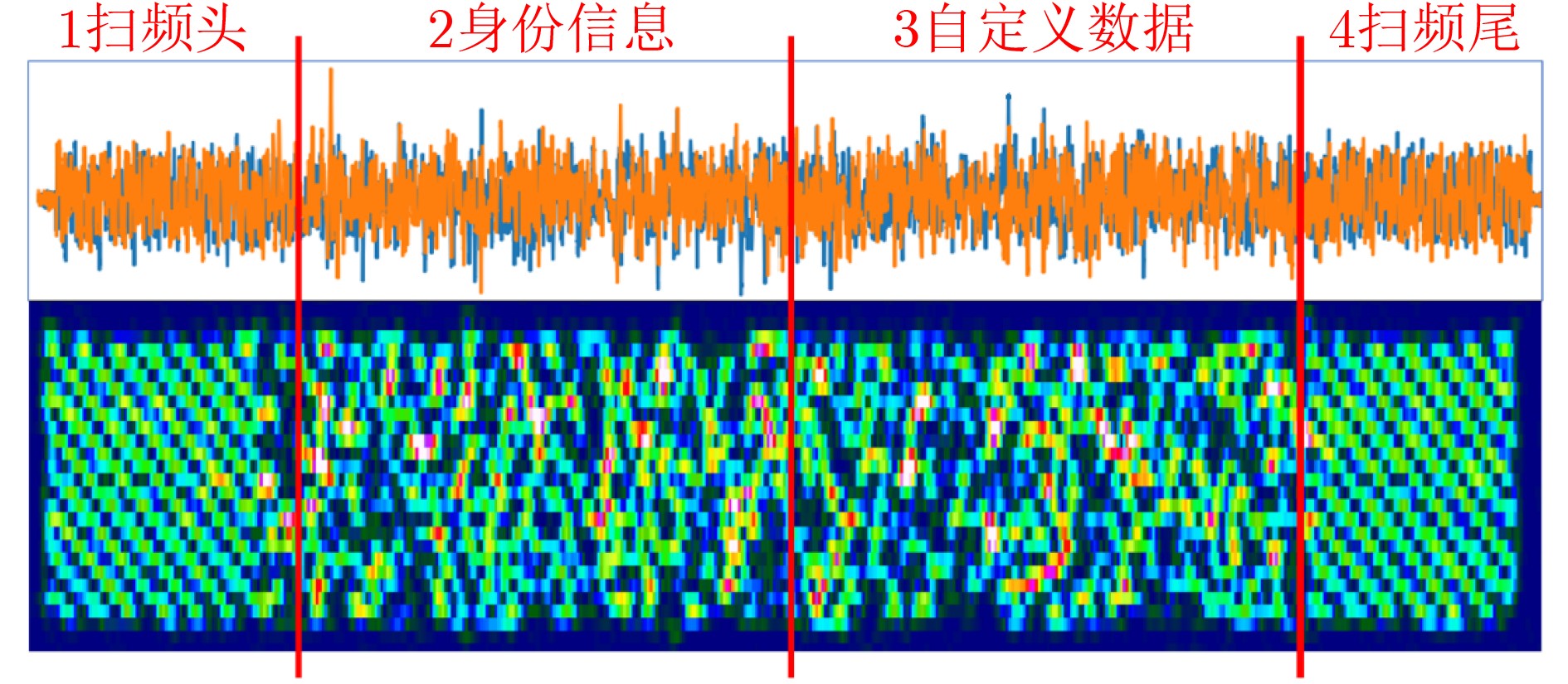
RF-based drone detection is an essential method for managing non-cooperative drones, with Drone Individual Recognition (DIR) via RF signals being a key component in the detection process. Given the current scarcity of DIR datasets, this paper proposes an open-source DroneRFb-DIR dataset for RF-based DIR. The dataset is constructed by capturing RF signals exchanged between drones and their remote controllers using a Software-Defined Radio (SDR). It includes signals from six types of drones, each with three different individuals, as well as background signals from urban environments. The captured signals are stored in raw I/Q format, and each drone type consists of over 40 signal segments, with each segment containing more than 4 million sample points. The RF sampling range spans from 2.4 GHz to 2.48 GHz, covering Flight Control Signals (FCS), Video Transmission Signals (VTS), and interference from surrounding devices. The dataset is annotated with entity identifiers (e.g., drone type and individual) and environmental labels (line-of-sight vs. non-line-of-sight). A DIR method based on fast frequency estimation and time-domain correlation analysis is also proposed and validated using this dataset. Objective: Drones are increasingly used in sectors such as geospatial mapping, aerial photography, traffic monitoring, and disaster relief, playing a significant role in modern industries and daily life. However, the rise in unauthorized drone operations presents serious threats to national security, public safety, and privacy, especially in urban areas. While existing methods emphasize general drone detection and classification, they struggle to distinguish individual drones of the same type, which is crucial for distinguishing friend from foe, analyzing swarm dynamics, and implementing effective countermeasures. This study addresses this gap by introducing the DroneRFb-DIR dataset, a large-scale, open-source RF signal dataset for non-cooperative DIR. Additionally, a novel method based on fast frequency estimation and time-domain correlation analysis is proposed to achieve accurate drone identification in urban environments. Methods: The DroneRFb-DIR dataset is developed using SDR device to capture RF signals in an urban environment with interference from devices like Wi-Fi and Bluetooth. It includes signals from six drone types, each with three individual units, as well as background reference signals. The dataset is collected at an 80 MHz sampling rate in the 2.4~2.48 GHz band and stored in raw I/Q format for detailed analysis. Each signal is annotated with identifiers (e.g., drone type and individual) and scene labels (line-of-sight and non-line-of-sight). For algorithm validation, the dataset is partitioned into training and testing sets. The proposed method consists of three key stages: (1) Signal Detection: A dynamic bandpass or band-stop filter isolates drone control signals from background noise and interference. (2) Frequency Localization: Adaptive filtering and frequency estimation to identify the spectral location of drone signals. (3) Identity Feature Extraction: Correlation analysis extracts identity features from control signal segments to differentiate individual drones, focusing on unique frequency modulation patterns. Results and Discussions: The dataset comprises 4,690 signal segments, each containing with over 4 million sample points. Experiments demonstrated the effectiveness of the proposed method (Table 3), showing high rejection rates of background signals and accurate identification of specific drone types. However, performance varied across drone types due to factors such as signal quality, environmental interference, and control signal characteristics. For instance, drones with low-SNR signals or less distinct frequency modulation patterns posed greater challenges for identification. Despite these difficulties, the method achieved competitive accuracy in identifying individual drones, even in non-line-of-sight conditions. These findings underscore the importance of advanced filtering and feature extraction for robust DIR in complex urban environments. Conclusions: This study addresses the critical need for DIR technologies by introducing the DroneRFb-DIR dataset and a novel identification method. Featuring six drone types, 18 individual drones, and one background signal class, the dataset is the first large-scale open-source resource for non-cooperative DIR in urban scenarios (Table 2). The proposed method effectively separates drone signals from interference and accurately identifies individual drones. Future work will focus on expanding the dataset with more diverse drone types, additional environmental scenarios (e.g., multipath interference and dynamic drone states), and machine learning models for improved recognition. Optimization of non-learning methods will also be explored to enhance feature extraction and identification rates, especially for drones with weaker signal characteristics. -
表 1 无人机探测手段特点
探测手段 最大有效距离(m) 原理 缺点 雷达 8000 微多普勒 无人机雷达截面积小,成本高,不适合城市场景 音频 200 时频特征 覆盖范围小,受噪声影响大 视觉 1500 外观特征和运动特征 受遮挡、天气环境影响大 射频 5000 通信信道 易受城市环境下干扰信号影响  下载: 导出CSV
下载: 导出CSV
表 2 个体标签与型号对应关系
个体标签 型号 A1, A2, A3 DJI Mavic 3 Pro B 背景 C1, C2, C3 DJI Mini 2 SE D1, D2, D3 DJI Mini 4 Pro E1, E2, E3 DJI Mini 3 F1, F2, F3 DJI Air 3 G1, G2, G3 DJI Air 2S
下载: 导出CSV
-
[1] SHI Xiufang, YANG Chaoqun, XIE Weige, et al. Anti-drone system with multiple surveillance technologies: Architecture, implementation, and challenges[J]. IEEE Communications Magazine, 2018, 56(4): 68–74. doi: 10.1109/MCOM.2018.1700430. [2] 陈新颖, 盛敏, 李博, 等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789.CHEN Xinying, SHENG Min, LI Bo, et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics & Information Technology, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789. [3] KAUFMANN E, BAUERSFELD L, LOQUERCIO A, et al. Champion-level drone racing using deep reinforcement learning[J]. Nature, 2023, 620(7976): 982–987. doi: 10.1038/s41586-023-06419-4. [4] KUNERTOVA D. The war in Ukraine shows the game-changing effect of drones depends on the game[J]. Bulletin of the Atomic Scientists, 2023, 79(2): 95–102. doi: 10.1080/00963402.2023.2178180. [5] 国务院, 中央军委. 无人驾驶航空器飞行管理暂行条例[EB/OL]. https://www.gov.cn/zhengce/content/202306/content_6888799.htm, 2023.The State Council of the People’s Republic of China, The Central Military Commission of the Communist Party of China. Interim regulations on the management of unmanned aircraft flights[EB/OL]. https://www.gov.cn/zhengce/content/202306/content_6888799.htm, 2023. [6] 聂伟, 戴琪霏, 杨小龙, 等. 基于多维信号特征的无人机探测识别方法[J]. 电子与信息学报, 2024, 46(3): 1089–1099. doi: 10.11999/JEIT230302.NIE Wei, DAI Qifei, YANG Xiaolong, et al. Unmanned aerial vehicle detection and recognition method based on multi-dimensional signal feature[J]. Journal of Electronics & Information Technology, 2024, 46(3): 1089–1099. doi: 10.11999/JEIT230302. [7] SHI Zhiguo, CHANG Xianyu, YANG Chaoqun, et al. An acoustic-based surveillance system for amateur drones detection and localization[J]. IEEE Transactions on Vehicular Technology, 2020, 69(3): 2731–2739. doi: 10.1109/TVT.2020.2964110. [8] SI Zheng, LIU Chao, LIU Jianyu, et al. Application of SNNS model based on multi-dimensional attention in drone radio frequency signal classification[C].2024 IEEE International Conference on Acoustics, Speech and Signal Processing, Seoul, Republic of Korea, 2024: 231–235. doi: 10.1109/ICASSP48485.2024.10446694. [9] GLÜGE S, NYFELER M, AGHAEBRAHIMIAN A, et al. Robust low-cost drone detection and classification using convolutional neural networks in low SNR environments[J]. IEEE Journal of Radio Frequency Identification, 2024, 8: 821–830. doi: 10.1109/JRFID.2024.3487303. [10] 俞宁宁, 毛盛健, 周成伟, 等. DroneRFa: 用于侦测低空无人机的大规模无人机射频信号数据集[J]. 电子与信息学报, 2024, 46(4): 1147–1156. doi: 10.11999/JEIT230570.YU Ningning, MAO Shengjian, ZHOU Chengwei, et al. DroneRFa: A large-scale dataset of drone radio frequency signals for detecting low-altitude drones[J]. Journal of Electronics & Information Technology, 2024, 46(4): 1147–1156. doi: 10.11999/JEIT230570. [11] YU Ningning, WU Jiajun, ZHOU Chengwei, et al. Open set learning for RF-based drone recognition via signal semantics[J]. IEEE Transactions on Information Forensics and Security, 2024, 19: 9894–9909. doi: 10.1109/TIFS.2024.3463535. [12] 彭鸿飞, 朱鑫潮, 周成伟, 等. 基于静动态综合估计的无人机蜂群态势感知技术[J]. 信号处理, 2024, 40(5): 826–838. doi: 10.16798/j.issn.1003-0530.2024.05.003.PENG Hongfei, ZHU Xinchao, ZHOU Chengwei, et al. UAV swarm situational awareness technology based on static and dynamic comprehensive estimations[J]. Journal of Signal Processing, 2024, 40(5): 826–838. doi: 10.16798/j.issn.1003-0530.2024.05.003. [13] ZHOU Chengwei, GU Yujie, SHI Zhiguo, et al. Structured nyquist correlation reconstruction for DOA estimation with sparse arrays[J]. IEEE Transactions on Signal Processing, 2023, 71: 1849–1862. doi: 10.1109/TSP.2023.3251110. [14] ZHENG Hang, ZHOU Chengwei, SHI Zhiguo, et al. Coarray tensor direction-of-arrival estimation[J]. IEEE Transactions on Signal Processing, 2023, 71: 1128–1142. doi: 10.1109/TSP.2023.3260559. [15] 郑航, 周成伟, 王勇, 等. EMVS互质面阵张量波束成形[J]. 信号处理, 2024, 40(2): 250–262. doi: 10.16798/j.issn.1003-0530.2024.02.003.ZHENG Hang, ZHOU Chengwei, WANG Yong, et al. Tensor beamforming for EMVS coprime planar array[J]. Journal of Signal Processing, 2024, 40(2): 250–262. doi: 10.16798/j.issn.1003-0530.2024.02.003. [16] WANG Qiexiang, WANG Longhui, YU Lebin, et al. An ID-based robust identification approach toward multitype noncooperative drones[J]. IEEE Sensors Journal, 2023, 23(9): 10179–10192. doi: 10.1109/JSEN.2023.3259203. [17] ZHAO Zheng, SÄRKKÄ S, SJÖLUND J, et al. Probabilistic estimation of instantaneous frequencies of chirp signals[J]. IEEE Transactions on Signal Processing, 2023, 71: 461–476. doi: 10.1109/TSP.2023.3245720. [18] KHODARAHMI M and MAIHAMI V. A review on Kalman filter models[J]. Archives of Computational Methods in Engineering, 2023, 30(1): 727–747. doi: 10.1007/s11831-022-09815-7. -

 下载:
下载:






图(8) / 表(3)
计量
- 文章访问数: 6394
- HTML全文浏览量: 2509
- PDF下载量: 1197
- 被引次数: 0
