

Global Navigation Satellite System Partial Ambiguity Resolution Method Integrating Ionospheric Delay Correction and Multi-frequency Signal Optimization
-
摘要: 针对全球导航卫星系统(GNSS)在遮挡环境下定位精度受限以及差分方法在较长基线时难以消除电离层延迟的问题,该文提出一种改进的部分模糊度解算(MPAR)方法。该方法融合了无几何模式下的基于电离层延迟改正模型的级联整数解算(ICIR)与几何模式下的最小二乘降相关平差(LAMBDA)。通过引入电离层延迟改正模型并将其融入ICIR方法中,有效解决了电离层延迟误差对模糊度解算(AR)的影响,提高了长基线条件下的定位精度。同时,为提升观测值质量不佳时的数据利用率,本研究利用卫星三频最优子集信息辅助非三频子集进行AR。具体而言,对最优子集卫星采用改进的ICIR方法进行解算,而对非三频卫星子集则结合最优子集的辅助信息,采用LAMBDA方法进行解算。两阶段解算策略不仅降低了计算复杂度,还显著提高了AR的成功率和可靠性,从而全面提升了GNSS定位的性能。实验结果表明,MPARICIR方法在各种基线条件和卫星数据质量下均表现出优异的定位精度和稳定性。Abstract:
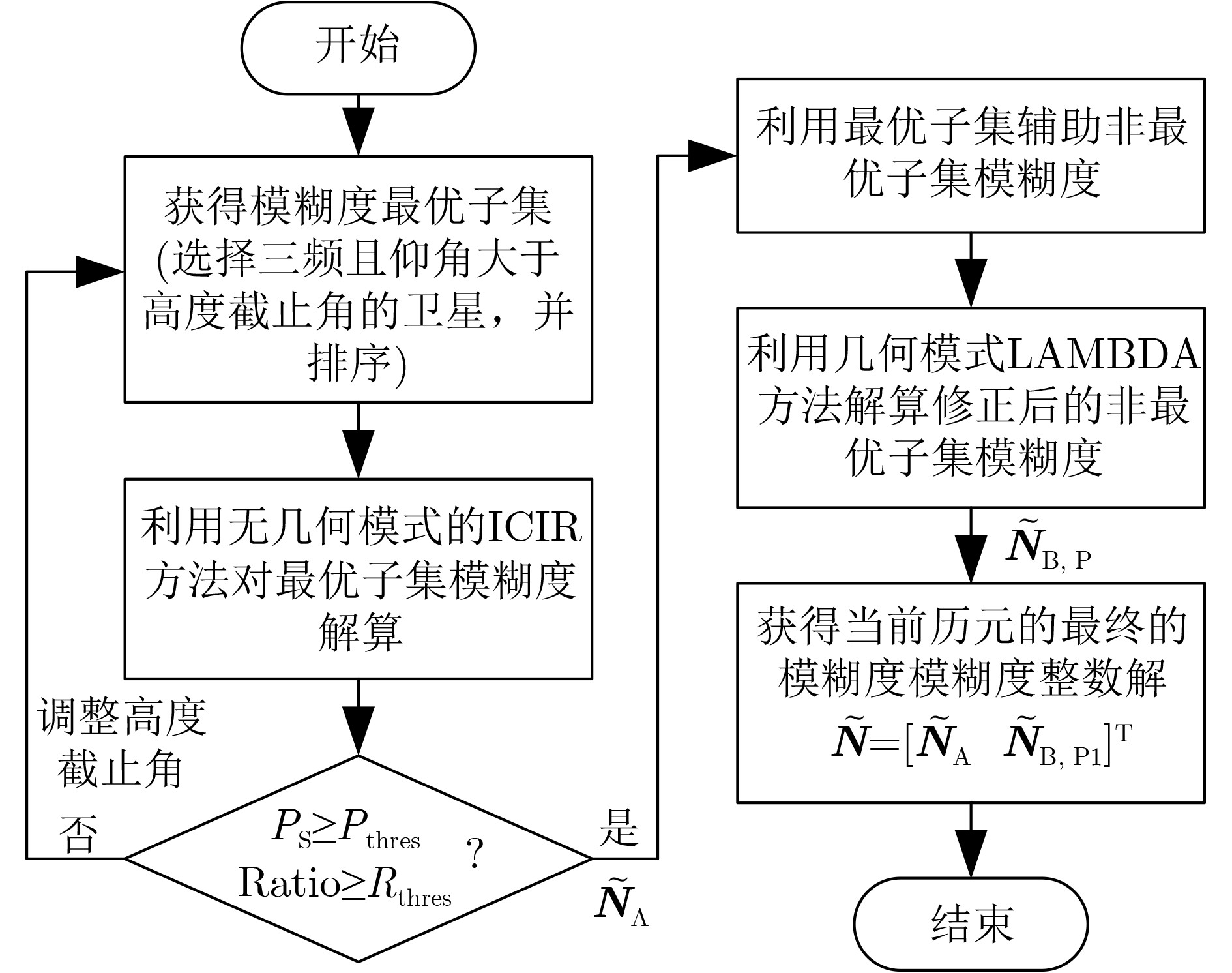
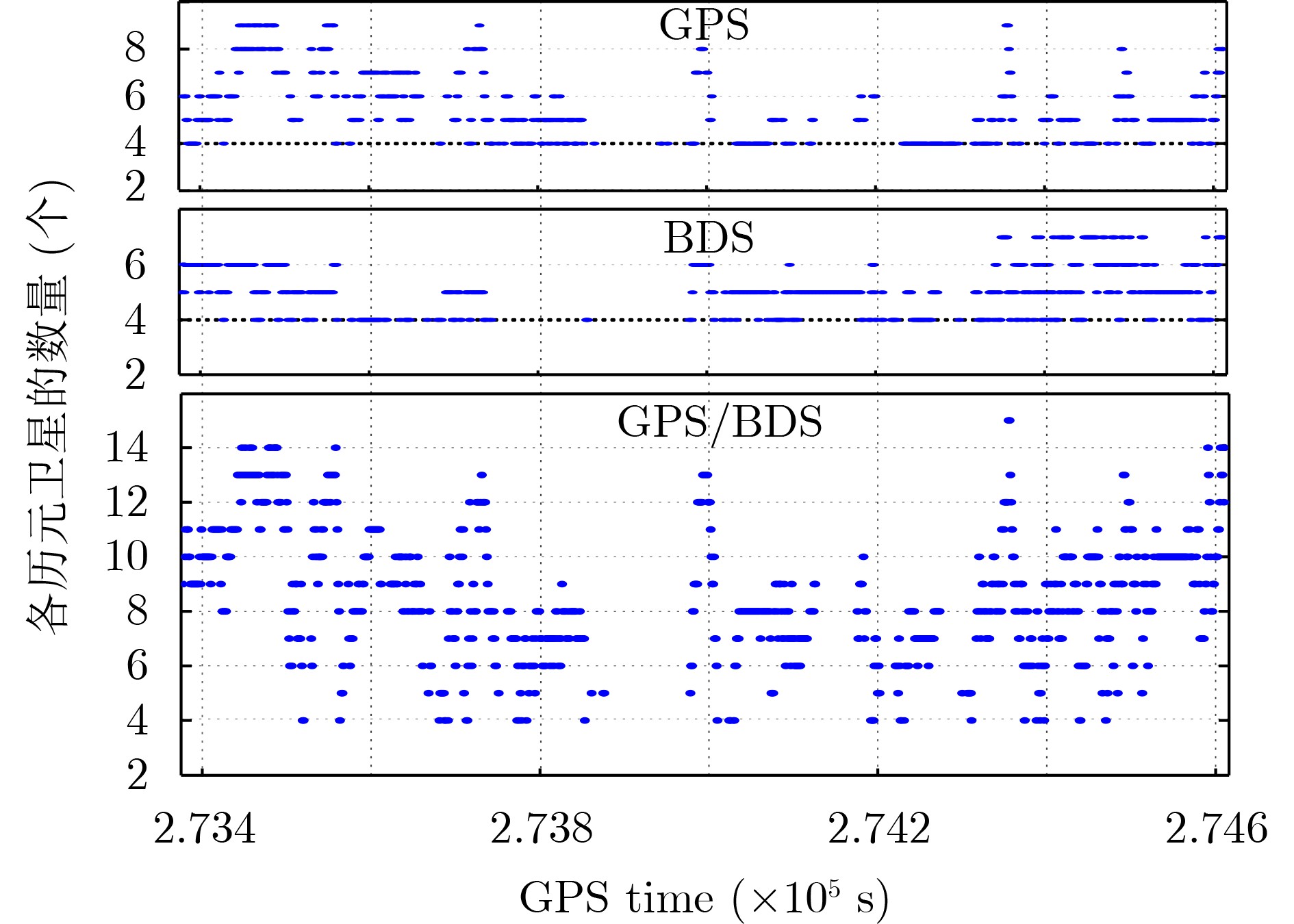
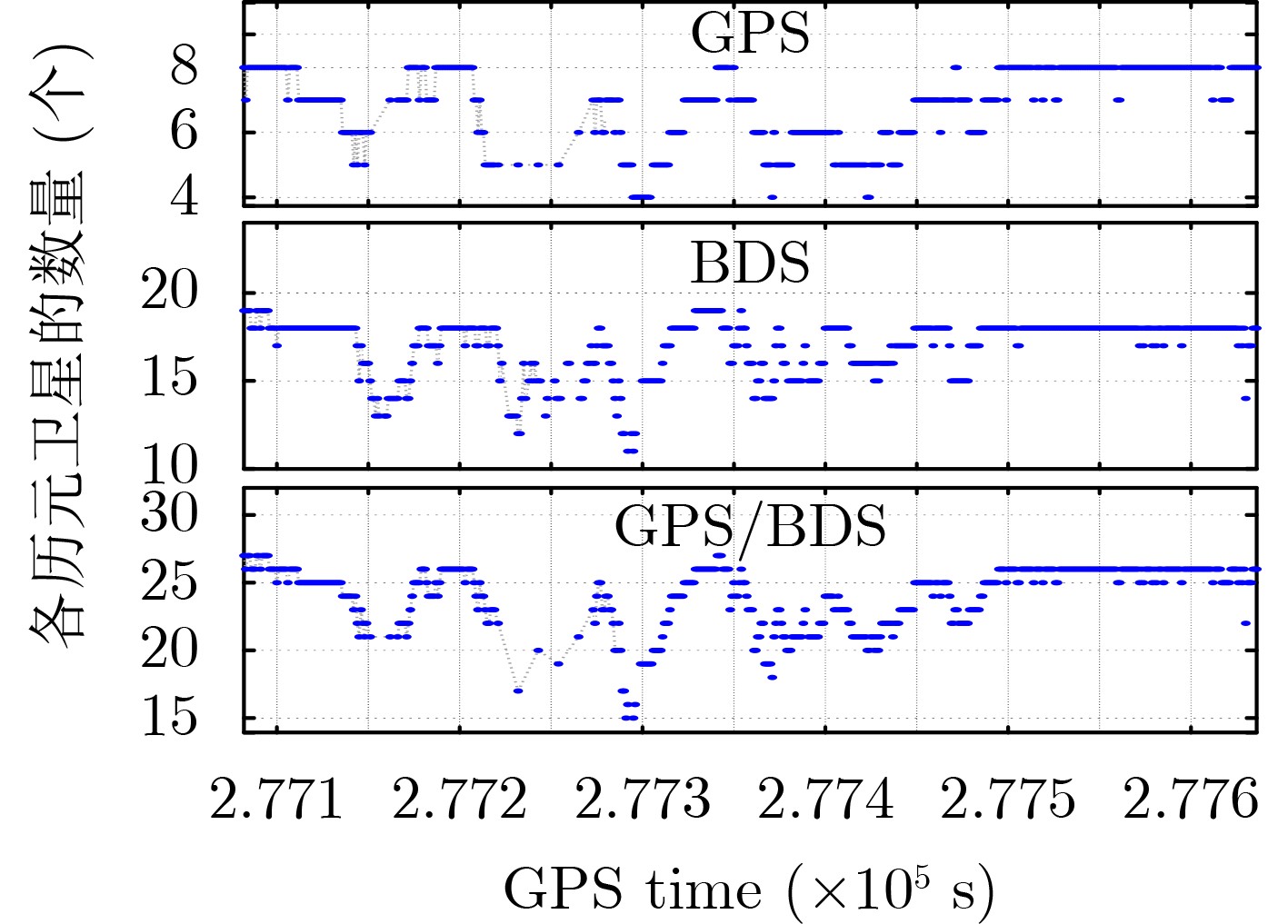
Objective Global Navigation Satellite System (GNSS) high-precision positioning is widely applied due to its accuracy. However, the integrity of the Ambiguity Resolution (AR) process remains limited, particularly in occluded environments and over long baselines. Traditional AR methods are often affected by ionospheric delay errors, which become substantial when the ionospheric conditions differ between reference and rover stations. This paper proposes a Modified Partial Ambiguity Resolution (MPAR) method that integrates ionospheric delay correction models with multi-frequency signal optimization. The combined approach improves GNSS positioning accuracy and reliability under varied environmental and baseline conditions. Methods To reduce the effect of ionospheric delay on AR, this study incorporates an Ionospheric delay correction model into the geometry-free Cascade Integer Resolution (ICIR) method. ICIR resolves the integer ambiguities of Extra-Wide Lane (EWL), Wide Lane (WL), and Narrow Lane (NL) combinations using carrier phase measurements with different wavelengths. The ionospheric delay correction model enables compensation for differential delays between stations, improving AR accuracy, particularly over long baselines. To further enhance data usage—especially in cases of low-quality observations—a two-stage partial AR strategy is employed. In the first stage, the ICIR method is applied to an optimal subset of satellites selected based on tri-frequency availability and high elevation angles. For the non-optimal subset, which may include satellites with limited frequencies or weaker signal quality, the Least-Squares AMBiguity Decorrelation Adjustment (LAMBDA) method is used in geometric mode, with assistance from the ambiguity-fixed results of the optimal subset. This integrated approach reduces computational complexity and improves the AR success rate and reliability. The MPAR method proceeds as follows: (1) select the optimal satellite subset based on frequency availability and elevation angle; (2) apply the ICIR method to resolve ambiguities in this subset; (3) use the fixed ambiguities from the optimal subset to assist in resolving ambiguities for the non-optimal subset via the LAMBDA method; (4) obtain the final integer ambiguity solution for the full epoch. Results and Discussions The proposed MPAR method is validated using two datasets collected under different environments: one from Tokyo, characterized by complex urban occlusion and long baselines (approximately 1 700 meters), and another from Wuhan, featuring an open campus environment and short baselines (approximately 600 meters). The results show that the MPAR method outperforms traditional PAR methods in positioning accuracy, AR success rate, and computational efficiency. As shown in ( Fig. 3 ) and (Fig. 5 ), satellite visibility in the Tokyo dataset is significantly affected by occlusion, leading to fewer available satellites compared to the Wuhan dataset. Despite these challenges, the MPAR method achieves the highest success rate and the lowest Average Standard Deviation (ASD) in all tested scenarios, including GPS, BDS, and dual-system modes (Table 2 andTable 4 ). In the Tokyo dataset, the MPAR method reduces the ASD by up to 40% compared to traditional methods, reflecting its robustness in complex environments. The AR success rate also significantly improves with the MPAR method. As presented in (Table 3 ) and (Table 5 ), the MPAR method achieves AR success rates exceeding 86% in all tested scenarios, with a peak rate of 99.4% in the GPS/BDS dual-system mode of the Wuhan dataset. These results demonstrate the effectiveness of the proposed method in enhancing AR reliability under challenging conditions. In terms of computational efficiency, the MPAR method exhibits balanced performance. Although the use of the ionospheric delay correction model slightly increases computational complexity, the overall efficiency remains competitive, with an average solution time of approximately 0.13 seconds per epoch (Table 3 andTable 5 ). This performance supports the suitability of the MPAR method for real-time applications. Furthermore,Table 3 (Tokyo dataset) andTable 5 (Wuhan dataset) summarize the performance metrics of the five AR methods evaluated. The MPARICIR method achieves the highest AR success rates across all systems and environments, reaching 93.1% and 99.4% for the Tokyo and Wuhan datasets, respectively. Notably, the MPARICIR method maintains a high success rate while reducing computation time compared to other methods, indicating its efficiency. These results support the effectiveness and robustness of the proposed MPARICIR method in improving GNSS positioning performance.Conclusions This study proposes an MPAR method for high-precision GNSS positioning. By integrating ionospheric delay correction models with multi-frequency signal optimization, MPAR combines the strengths of geometry-free and geometry-based AR strategies. The method effectively reduces the effect of ionospheric delay, particularly over long baselines and in occluded environments. Experimental results confirm that MPAR improves positioning accuracy, AR success rate, and computational efficiency relative to conventional methods. Its consistent performance across varied environments and baseline lengths highlights its suitability for broad application in high-precision GNSS positioning. -
表 1 数据集信息与实验设置
数据集 采集时间 基线长度(km) 路径长度(km) 高度截止角(º) 采样频率(Hz) 遮挡 武汉 04:58:02~05:07:16 0.6 2.1 15 1 少 东京 03:56:15~04:16:56 1.7 6.4 15 1 多  下载: 导出CSV
下载: 导出CSV
表 2 东京数据集xyz方向定位结果平均标准差具体数据(m)
平均
标准差PAR
LAMPAR
CIRPARI
CIRMPAR
LAMMPAR
ICIRG x 0.251 5 0.254 6 0.241 5 0.145 1 0.128 4 y 0.168 1 0.169 8 0.158 6 0.121 9 0.105 4 z 0.220 8 0.225 4 0.213 8 0.152 9 0.133 5 C x 0.760 3 0.768 7 0.754 2 0.630 7 0.609 8 y 1.609 9 1.620 5 1.590 4 1.270 6 1.213 5 z 0.753 8 0.761 3 0.745 7 0.575 8 0.515 4 GC x 0.378 8 0.382 5 0.361 3 0.305 6 0.288 5 y 0.659 5 0.667 6 0.649 5 0.514 2 0.485 3 z 0.512 6 0.518 7 0.501 9 0.404 4 0.377 8
下载: 导出CSV
表 3 东京数据集5种模糊度解算方法性能对比
东京数据集 PAR
LAMPAR
CIRPARI
CIRMPAR
LAMMPAR
ICIR总历元数 1 242 G 可定位历元 795 795 795 795 795 固定解历元 649 646 656 739 745 浮点解历元 146 149 139 56 50 成功率(%) 81.6 79.5 82.5 93.0 93.7 解算时间(s) 0.152 0.124 0.126 0.157 0.131 C 可定位历元 621 621 621 637 637 固定解历元 528 523 532 548 552 浮点解历元 93 98 89 89 85 成功率(%) 85.0 84.2 85.7 86.0 86.7 解算时间(s) 0.127 0.113 0.108 0.130 0.110 GC 可定位历元 943 943 943 943 943 固定解历元 790 788 796 872 878 浮点解历元 153 155 147 71 65 成功率(%) 83.8 83.6 84.4 92.5 93.1 解算时间(s) 0.142 0.127 0.129 0.147 0.132
下载: 导出CSV
表 4 武汉数据集xyz方向定位结果平均标准差具体数据(m)
平均
标准差PAR
LAMPAR
CIRPAR
ICIRMPAR
LAMMPAR
ICIRG x 0.039 4 0.041 0 0.035 4 0.033 8 0.031 5 y 0.072 9 0.073 4 0.066 0 0.063 2 0.061 1 z 0.044 9 0.045 7 0.040 9 0.039 8 0.036 6 C x 0.016 9 0.017 8 0.012 2 0.006 3 0.005 7 y 0.028 9 0.030 0 0.020 9 0.011 2 0.010 6 z 0.014 8 0.015 3 0.010 4 0.005 9 0.004 9 GC x 0.006 8 0.007 1 0.006 5 0.006 2 0.005 7 y 0.012 5 0.012 8 0.012 3 0.011 2 0.010 8 z 0.006 1 0.006 2 0.005 9 0.005 6 0.004 9
下载: 导出CSV
表 5 武汉数据集5种模糊度解算方法性能对比
武汉数据集 PAR
LAMPAR
CIRPAR
ICIRMPAR
LAMMPAR
ICIR总历元数 555 G 可定位历元 492 492 492 492 492 固定解历元 462 460 464 472 478 浮点解历元 30 32 28 20 14 成功率(%) 93.7 93.5 94.3 96.1 97.2 解算时间(s) 0.137 0.120 0.123 0.139 0.130 C 可定位历元 526 526 526 529 529 固定解历元 449 446 479 510 523 浮点解历元 77 80 47 19 6 成功率(%) 85.4 84.8 91.1 96.4 98.9 解算时间(s) 0.161 0.142 0.136 0.167 0.139 GC 可定位历元 537 537 537 537 537 固定解历元 519 516 525 529 534 浮点解历元 18 21 12 8 3 成功率(%) 96.6 96.1 97.8 98.5 99.4 解算时间(s) 0.183 0.166 0.151 0.173 0.158
下载: 导出CSV
-
[1] CHEN Jiajia, WANG Jun, YUAN Hong, et al. Performance analysis of a GNSS multipath detection and mitigation method with two low-cost antennas in RTK positioning[J]. IEEE Sensors Journal, 2022, 22(6): 4827–4835. doi: 10.1109/JSEN.2021.3068767. [2] KHODABANDEH A, ZAMINPARDAZ S, and NADARAJAH N. A study on multi-GNSS phase-only positioning[J]. Measurement Science and Technology, 2021, 32(9): 095005. doi: 10.1088/1361-6501/abeced. [3] CAI Jianqing, GRAFAREND E W, and HU Congwei. The total optimal search criterion in solving the mixed integer linear model with GNSS carrier phase observations[J]. GPS Solutions, 2009, 13(3): 221–230. doi: 10.1007/s10291-008-0115-y. [4] ZHANG Zhetao, LI Bofeng, HE Xiufeng, et al. Models, methods and assessment of four-frequency carrier ambiguity resolution for BeiDou-3 observations[J]. GPS Solutions, 2020, 24(4): 96. doi: 10.1007/s10291-020-01011-z. [5] TEUNISSEN P J G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation[J]. Journal of Geodesy, 1995, 70(1/2): 65–82. doi: 10.1007/BF00863419. [6] 周非, 杨铁军, 黄顺吉. 基线约束辅助整周模糊度求解研究[J]. 电子学报, 2004, 32(9): 1549–1552. doi: 10.3321/j.issn:0372-2112.2004.09.037.ZHOU Fei, YANG Tiejun, and HUANG Shunji. Research of ambiguity resolution with baseline constraint[J]. Acta Electronica Sinica, 2004, 32(9): 1549–1552. doi: 10.3321/j.issn:0372-2112.2004.09.037. [7] GUO Jiang, GENG Jianghui, ZENG Jing, et al. GPS/Galileo/BDS phase bias stream from Wuhan IGS analysis center for real-time PPP ambiguity resolution[J]. GPS Solutions, 2024, 28(2): 67. doi: 10.1007/s10291-023-01610-6. [8] ZHANG Zhiteng, LI Bofeng, GAO Yang, et al. Asynchronous and time-differenced RTK for ocean applications using the BeiDou short message service[J]. Journal of Geodesy, 2023, 97(1): 7. doi: 10.1007/s00190-023-01699-0. [9] 刘增军, 彭竞, 吕志成, 等. 一种适用于长基线的改进CIR算法[J]. 国防科技大学学报, 2013, 35(2): 93–98. doi: 10.3969/j.issn.1001-2486.2013.02.017.LIU Zengjun, PENG Jing, LV Zhicheng, et al. An improved CIR for long baseline[J]. Journal of National University of Defense Technology, 2013, 35(2): 93–98. doi: 10.3969/j.issn.1001-2486.2013.02.017. [10] TANG Weiming, DENG Chenlong, SHI Chuang, et al. Triple-frequency carrier ambiguity resolution for Beidou navigation satellite system[J]. GPS Solutions, 2014, 18(3): 335–344. doi: 10.1007/s10291-013-0333-9. [11] NING Yafei and YUAN Yunbin. A modified geometry- and ionospheric-free combination for static three-carrier ambiguity resolution[J]. GPS Solutions, 2017, 21(4): 1633–1645. doi: 10.1007/s10291-017-0642-5. [12] TANG Weiming, SHEN Mingxing, DENG Chenlong, et al. Network-based triple-frequency carrier phase ambiguity resolution between reference stations using BDS data for long baselines[J]. GPS Solutions, 2018, 22(3): 73. doi: 10.1007/s10291-018-0737-7. [13] PU Yakun, SONG Min, YUAN Yunbin, et al. Triple-frequency ambiguity resolution for GPS/Galileo/BDS between long-baseline network reference stations in different ionospheric regions[J]. GPS Solutions, 2022, 26(4): 146. doi: 10.1007/s10291-022-01336-x. [14] JI Shengyue, CHEN Wu, ZHAO Chunmei, et al. Single epoch ambiguity resolution for Galileo with the CAR and LAMBDA methods[J]. GPS Solutions, 2007, 11(4): 259–268. doi: 10.1007/s10291-007-0057-9. [15] HAN Houzeng, WANG Jian, WANG Jinling, et al. Reliable partial ambiguity resolution for single-frequency GPS/BDS and INS integration[J]. GPS Solutions, 2017, 21(1): 251–264. doi: 10.1007/s10291-016-0519-z. [16] YAN Zhongbao and ZHANG Xiaohong. The performance of three-frequency GPS PPP-RTK with partial ambiguity resolution[J]. Atmosphere, 2022, 13(7): 1014. doi: 10.3390/atmos13071014. [17] LI Xin, LI Xingxing, JIANG Zihao, et al. A unified model of GNSS phase/code bias calibration for PPP ambiguity resolution with GPS, BDS, Galileo and GLONASS multi-frequency observations[J]. GPS Solutions, 2022, 26(3): 84. doi: 10.1007/s10291-022-01269-5. [18] ZHANG Xu and YANG Jie. MPARELAM: A robust approach for ambiguity resolution in complex RTK positioning scenarios[J]. IEEE Sensors Journal, 2023, 23(17): 19582–19589. doi: 10.1109/JSEN.2023.3293461. [19] CHEN Guang’e, LI Bofeng, ZHANG Zhiteng, et al. Integer ambiguity resolution and precise positioning for tight integration of BDS-3, GPS, GALILEO, and QZSS overlapping frequencies signals[J]. GPS Solutions, 2022, 26(1): 26. doi: 10.1007/s10291-021-01203-1. [20] FENG Shaojun and JOKINEN A. Integer ambiguity validation in high accuracy GNSS positioning[J]. GPS Solutions, 2017, 21(1): 79–87. doi: 10.1007/s10291-015-0506-9. -

 下载:
下载:





图(6) / 表(5)
计量
- 文章访问数: 769
- HTML全文浏览量: 613
- PDF下载量: 45
- 被引次数: 0
