

Comprehensive Error in UAV Cluster Trajectory Deception for Networked Radar
-
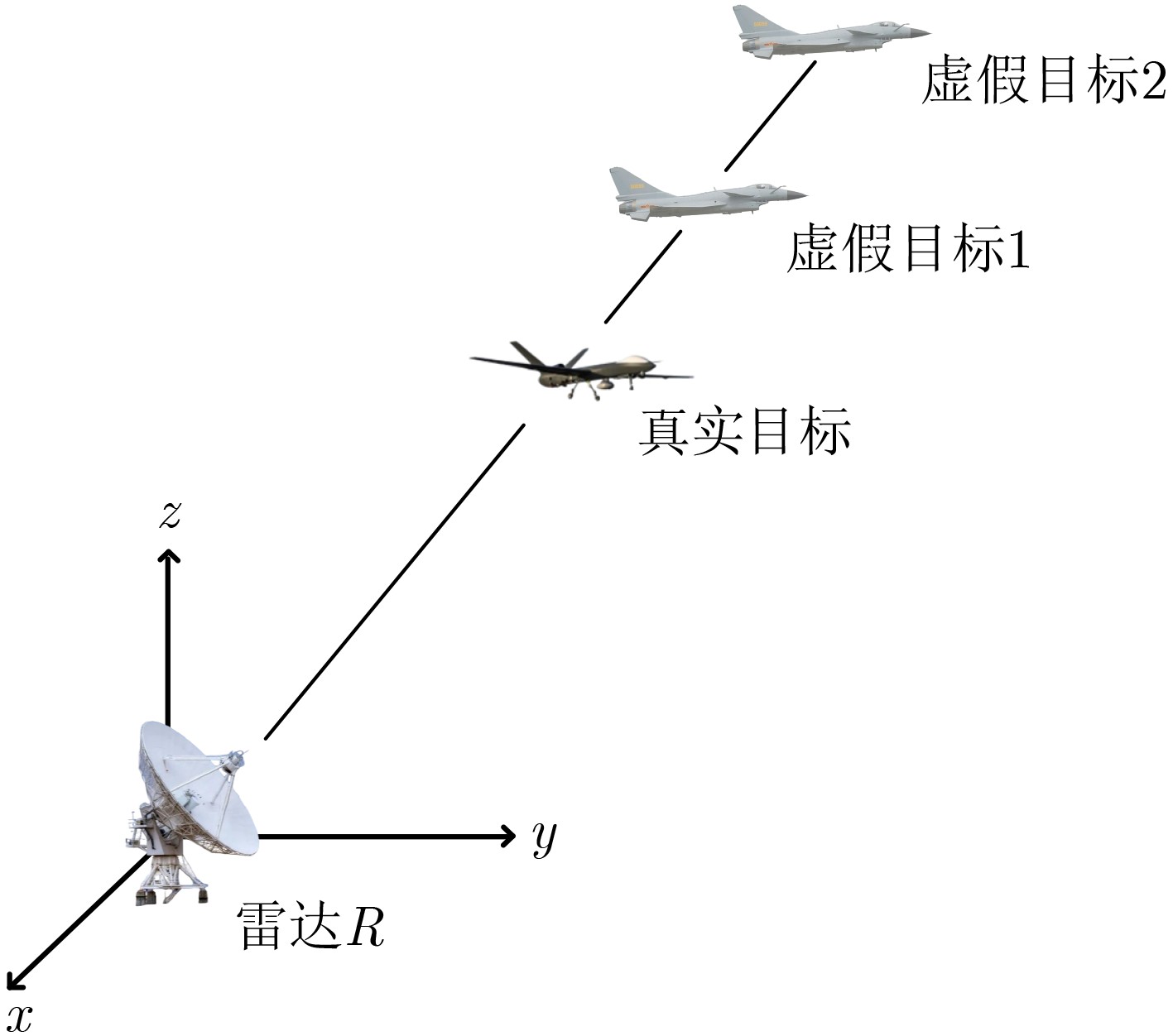
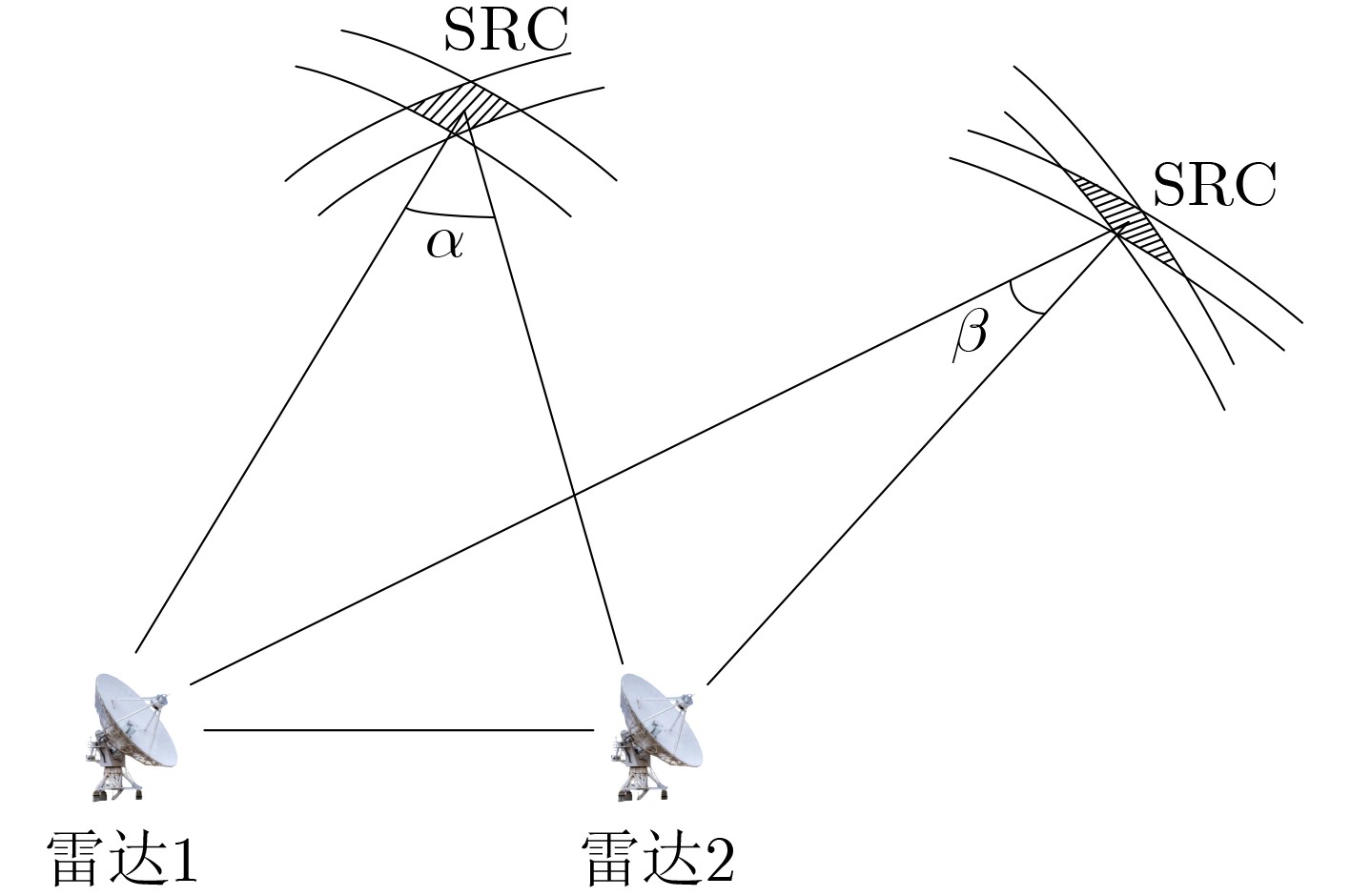
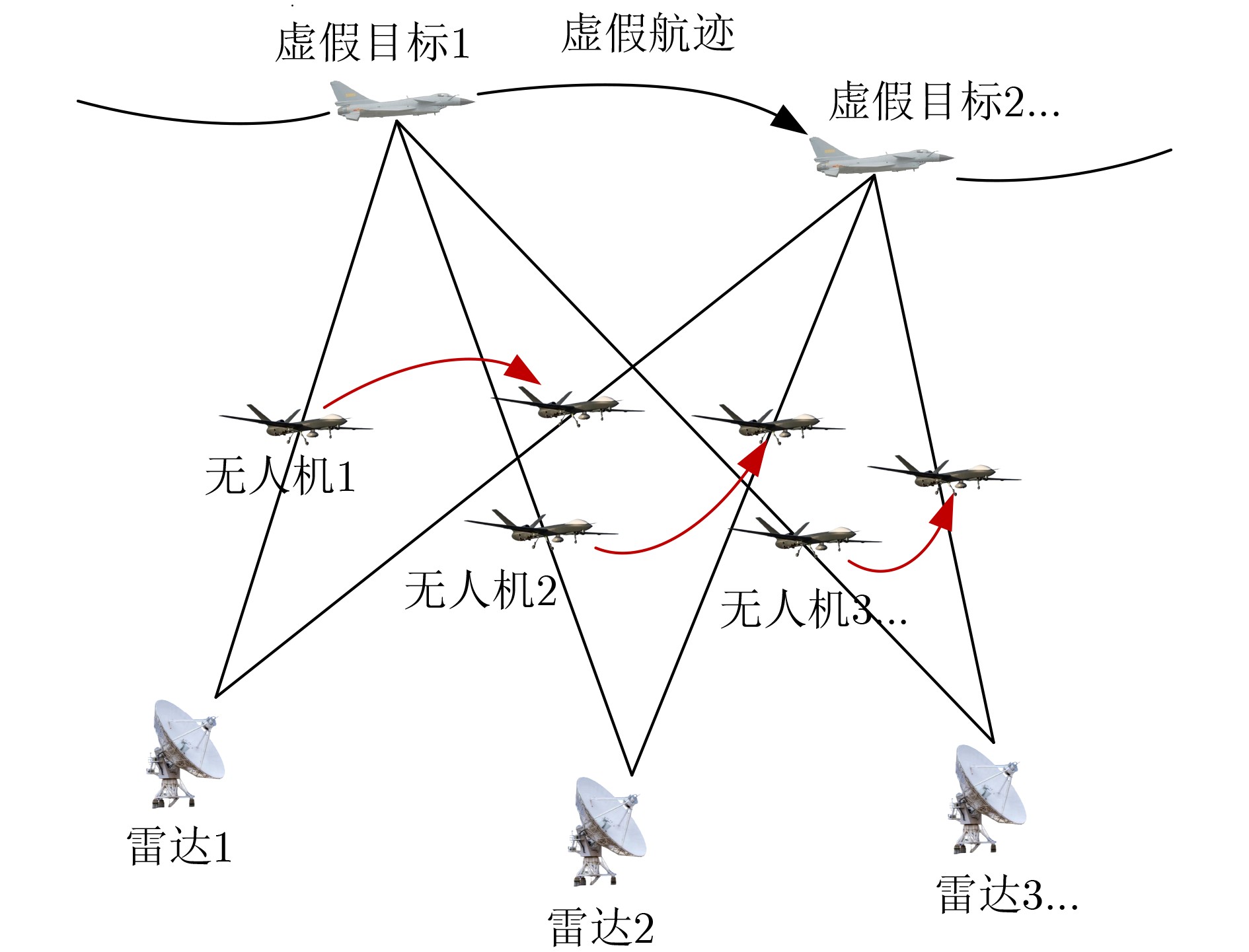
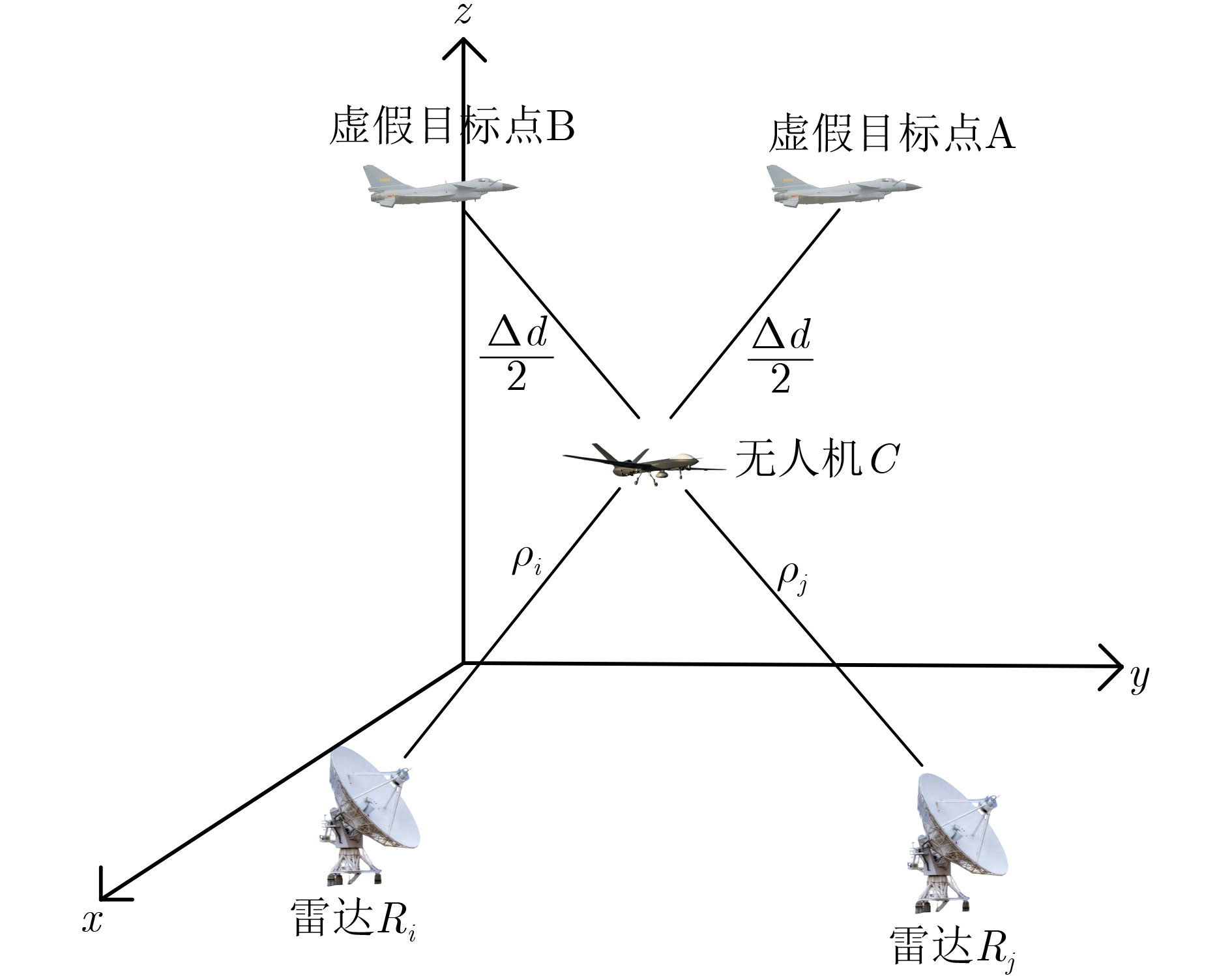
摘要: 无人机集群在对组网雷达进行航迹欺骗过程中通过延时转发截获的雷达信号生成虚假目标点,而雷达站址误差、无人机抖动误差及转发时延误差均会造成虚假目标点偏离预设位置,进而使航迹欺骗效果恶化。针对上述问题,该文在雷达量测位置、无人机预设位置和欺骗距离已知以及组网雷达空间分辨单元(SRC)一定的情况下,分析了雷达站址误差、无人机抖动误差及转发时延误差同时存在时无人机集群成功欺骗组网雷达的边界条件,并总结了上述误差对航迹欺骗效果的影响规律。数值仿真结果表明,当3种误差同时存在时,推导结果可以有效评估无人机集群对组网雷达的欺骗能力。Abstract: In the process of trajectory deception against the networked radar using an Unmanned Aerial Vehicle (UAV) cluster, false target points are generated by delaying and forwarding intercepted radar signals. Errors such as radar station location errors, UAV jitter errors, and forwarding delay errors can all cause these false target points to deviate from their intended positions, thereby degrading the effectiveness of the deception. Considering known radar measurement positions, UAV preset positions, deception distances, and a specific Space Resolution Cell (SRC) of the networked radar, the boundary condition of successfully deceiving networked radar by a UAV cluster is analyzed in this paper. The impact patterns of these errors on deception effectiveness are also summarized in the paper. The numerical simulation results show that when all three kinds of errors are present, the derived results can effectively evaluate the deception ability of the UAV cluster to the networked radar.
-
Key words:
- Trajectory deception /
- Networked radar /
- UAV cluster /
- Error analysis
-
表 1 坐标参数设置
名称 位置(km) 雷达R1 (0.00,0.00,0.00) 雷达R2 (8.00,6.00,0.00) 雷达R3 (14.00,20.00,0.00) 无人机A1 (4.25,10.20,17.00) 无人机A2 (5.75,10.50,15.00) 无人机A3 (8.15,14.80,13.00) 虚假目标点C (5.00,12.00,20.00)  下载: 导出CSV
下载: 导出CSV
表 2 组网雷达误差和最小分辨率计算表
雷达站址误差(m) 无人机抖动误差(m) 转发时延误差(μs) 最小分辨率(m) $ {e_{r1}} \le 4\;250.0 $ $ {e_{j1}} = 0.0 $ $ {e_{t1}} = 0.0 $ $ {\delta _{\min }} = 1\;500.0 $ $ {e_{r2}} \le 2\;250.0 $ $ {e_{j2}} = 0.0 $ $ {e_{t2}} = 0.0 $ $ {e_{r3}} \le 1\;392.9 $ $ {e_{j3}} = 0.0 $ $ {e_{t3}} = 0.0 $ $ {e_{r1}} = 0.0 $ $ {e_{j1}} \le 637.5 $ $ {e_{t1}} = 0.0 $ $ {\delta _{\min }} = 1\;500.0 $ $ {e_{r2}} = 0.0 $ $ {e_{j2}} \le 562.5 $ $ {e_{t2}} = 0.0 $ $ {e_{r3}} = 0.0 $ $ {e_{j3}} \le 487.5 $ $ {e_{t3}} = 0.0 $ $ {e_{r1}} = 0.0 $ $ {e_{j1}} = 0.0 $ $ {e_{t1}} \le 5.0 $ $ {\delta _{\min }} = 1\;500.0 $ $ {e_{r2}} = 0.0 $ $ {e_{j2}} = 0.0 $ $ {e_{t2}} \le 5.0 $ $ {e_{r3}} = 0.0 $ $ {e_{j3}} = 0.0 $ $ {e_{t3}} \le 5.0 $ $ {e_{r1}} \le 700.0 $ $ {e_{j1}} = 150.0 $ $ {e_{t1}} = 3.0 $ $ {\delta _{\min }} = 1\;500.0 $ $ {e_{r2}} \le 725.0 $ $ {e_{j2}} = 100.0 $ $ {e_{t2}} = 2.5 $ $ {e_{r3}} \le 692.9 $ $ {e_{j3}} = 50.0 $ $ {e_{t3}} = 2.0 $ $ {e_{r1}} = 1\;200.0 $ $ {e_{j1}} \le 75.0 $ $ {e_{t1}} = 3.0 $ $ {\delta _{\min }} = 1\;500.0 $ $ {e_{r2}} = 800.0 $ $ {e_{j2}} \le 81.3 $ $ {e_{t2}} = 2.5 $ $ {e_{r3}} = 600.0 $ $ {e_{j3}} \le 82.5 $ $ {e_{t3}} = 2.0 $ $ {e_{r1}} = 1\;200.0 $ $ {e_{j1}} = 150.0 $ $ {e_{t1}} \le 2.4 $ $ {\delta _{\min }} = 1\;500.0 $ $ {e_{r2}} = 800.0 $ $ {e_{j2}} = 100.0 $ $ {e_{t2}} \le 2.3 $ $ {e_{r3}} = 600.0 $ $ {e_{j3}} = 50.0 $ $ {e_{t3}} \le 2.3 $ $ {e_{r1}} = 1\;200.0 $ $ {e_{j1}} = 150.0 $ $ {e_{t1}} = 3.0 $ $ {\delta _{\min }} \ge 1\;400.0 $ $ {e_{r2}} = 800.0 $ $ {e_{j2}} = 100.0 $ $ {e_{t2}} = 2.5 $ $ {e_{r3}} = 600.0 $ $ {e_{j3}} = 50.0 $ $ {e_{t3}} = 2.0 $
下载: 导出CSV
-
[1] 兰俊杰, 陈蓓, 徐廷新. 组网雷达发展现状及其干扰技术[J]. 飞航导弹, 2009(12): 39–41. doi: 10.16338/j.issn.1009-1319.2009.12.019.LAN Junjie, CHEN Bei, and XU Tingxin. Development status and interference techniques of netted radar[J]. Aerodynamic Missile Journal, 2009(12): 39–41. doi: 10.16338/j.issn.1009-1319.2009.12.019. [2] 张养瑞. 对雷达网的多机伴随式协同干扰技术研究[D]. [博士论文], 北京理工大学, 2015.ZHANG Yangrui. Research on key technologies of cooperative ECM in multi-syndrome jammers for countering radar net[D]. [Ph. D. dissertation], Beijing Institute of Technology, 2015. [3] 任鑫. 基于多无人机的组网雷达欺骗干扰技术研究[D]. [硕士论文], 电子科技大学, 2023. doi: 10.27005/d.cnki.gdzku.2023.001268.REN Xin. Research on deception of radar network using multiple electronic combat air vehicles[D]. [Master dissertation], University of Electronic Science and Technology of China, 2023. doi: 10.27005/d.cnki.gdzku.2023.001268. [4] 吕炫. 面向雷达网的无人载体协同干扰策略与技术研究[D]. [硕士论文], 电子科技大学, 2023. doi: 10.27005/d.cnki.gdzku.2023.002594.LV Xuan. Research on unmanned carrier cooperative jamming strategy and technology for radar network[D]. [Master dissertation], University of Electronic Science and Technology of China, 2023. doi: 10.27005/d.cnki.gdzku.2023.002594. [5] 郭文元. 针对组网雷达的协同干扰技术研究[D]. [硕士论文], 哈尔滨工程大学, 2021. doi: 10.27060/d.cnki.ghbcu.2021.000764.GUO Wenyuan. Research on cooperative jamming technology for netted radar[D]. [Master dissertation], Harbin Engineering University, 2021. doi: 10.27060/d.cnki.ghbcu.2021.000764. [6] 陈保亮. 多无人机对组网雷达系统的航迹欺骗干扰研究[J]. 舰船电子工程, 2019, 39(11): 89–92,166. doi: 10.3969/j.issn.1672-9730.2019.11.022.CHEN Baoliang. Research on multi-UAVs track deception jamming against network radar system[J]. Ship Electronic Engineering, 2019, 39(11): 89–92,166. doi: 10.3969/j.issn.1672-9730.2019.11.022. [7] FAN Zhe, GAO Xiaojing, JIN Yi, et al. Research on route planning of group UAV cooperation for deception jamming to radar network[C]. 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 2020: 1966–1969. doi: 10.1109/ITNEC48623.2020.9085199. [8] 丁宸聪, 叶紫晴. 基于改进鲸鱼算法的多无人机协同欺骗干扰技术[J]. 电讯技术, 2024, 64(1): 67–73. doi: 10.20079/j.issn.1001-893x.230213002.DING Chencong and YE Ziqing. Multi-UAV cooperative deception jamming technology based on improved whale optimization algorithm[J]. Telecommunication Engineering, 2024, 64(1): 67–73. doi: 10.20079/j.issn.1001-893x.230213002. [9] 刘宇蕊, 陈云阳, 余鑫. 基于改进粒子群优化算法的多无人机协同欺骗干扰技术[J]. 舰船电子对抗, 2024, 47(1): 72–76. doi: 10.16426/j.cnki.jcdzdk.2024.01.012.LIU Yurui, CHEN Yunyang, and YU Xin. Multi-UAV cooperative deception jamming technology based on improved particle swarm optimization algorithm[J]. Shipboard Electronic Countermeasure, 2024, 47(1): 72–76. doi: 10.16426/j.cnki.jcdzdk.2024.01.012. [10] 李松, 李佳琦, 王博文, 等. 无人机辅助空中计算的轨迹和功率联合优化方法[J]. 电子与信息学报, 2024, 46(6): 2480–2487. doi: 10.11999/JEIT230917.LI Song, LI Jiaqi, WANG Bowen, et al. A joint optimization method for trajectory and power of unmanned aerial vehicle assisted over-the-air computation[J]. Journal of Electronics & Information Technology, 2024, 46(6): 2480–2487. doi: 10.11999/JEIT230917. [11] 赵艳丽, 李宏, 杜嘉薇, 等. 对空间探测雷达网的多机协同航迹欺骗干扰方法[J]. 电子与信息学报, 2023, 45(2): 585–591. doi: 10.11999/JEIT211575.ZHAO Yanli, LI Hong, DU Jiawei, et al. Multi-jammer cooperation track deception jamming method against space detection radar network[J]. Journal of Electronics & Information Technology, 2023, 45(2): 585–591. doi: 10.11999/JEIT211575. [12] 张磊, 罗迎, 张群. 雷达组网系统对抗有源干扰方法综述[J]. 信息对抗技术, 2023, 2(6): 1–16. doi: 10.12399/j.issn.2097-163x.2023.06.001.ZHANG Lei, LUO Ying, and ZHANG Qun. Review of countermeasures against active jamming for radar network[J]. Information Countermeasure Technology, 2023, 2(6): 1–16. doi: 10.12399/j.issn.2097-163x.2023.06.001. [13] 时晨光, 闻雯, 宋海伟, 等. 针对组网雷达的无人机集群转发式欺骗干扰时延误差研究[J]. 航空兵器, 2024, 31(2): 131–137. doi: 10.12132/ISSN.1673-5048.2023.0143.SHI Chenguang, WEN Wen, SONG Haiwei, et al. Research on delay error of UAV swarm repeater deception jamming against networked radar[J]. Aero Weaponry, 2024, 31(2): 131–137. doi: 10.12132/ISSN.1673-5048.2023.0143. [14] LIU Xiang and LI Dongsheng. A three-dimensional phantom track generation for radar network deception (January 2019)[J]. IEEE Access, 2019, 7: 27288–27301. doi: 10.1109/ACCESS.2019.2894409. [15] 王国宏, 杨忠, 吴健平. 雷达站站址误差对多机协同航迹欺骗干扰的影响分析[J]. 海军航空工程学院学报, 2015, 30(6): 501–504,510. doi: 10.7682/j.issn.1673-1522.2015.06.001.WANG Guohong, YANG Zhong, and WU Jianping. Influence analysis of radar location error on multi-aircraft cooperative track deception[J]. Journal of Naval Aeronautical and Astronautical University, 2015, 30(6): 501–504,510. doi: 10.7682/j.issn.1673-1522.2015.06.001. [16] 柏鹏, 王玉冰, 梁晓龙, 等. 无人机对雷达组网航迹欺骗综述[J]. 航空学报, 2020, 41(10): 23912.BAI Peng, WANG Yubing, LIANG Xiaolong, et al. Phantom track deception against radar networks using UAVs: Review[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(10): 23912. -

 下载:
下载:


图(8) / 表(2)
计量
- 文章访问数: 933
- HTML全文浏览量: 810
- PDF下载量: 67
- 被引次数: 0
