

Intelligent Wireless Resource Allocation Algorithm for Unmanned Aerial Vehicle Integrated Communication and Sensing Networks in Railway Emergency Scenarios
-
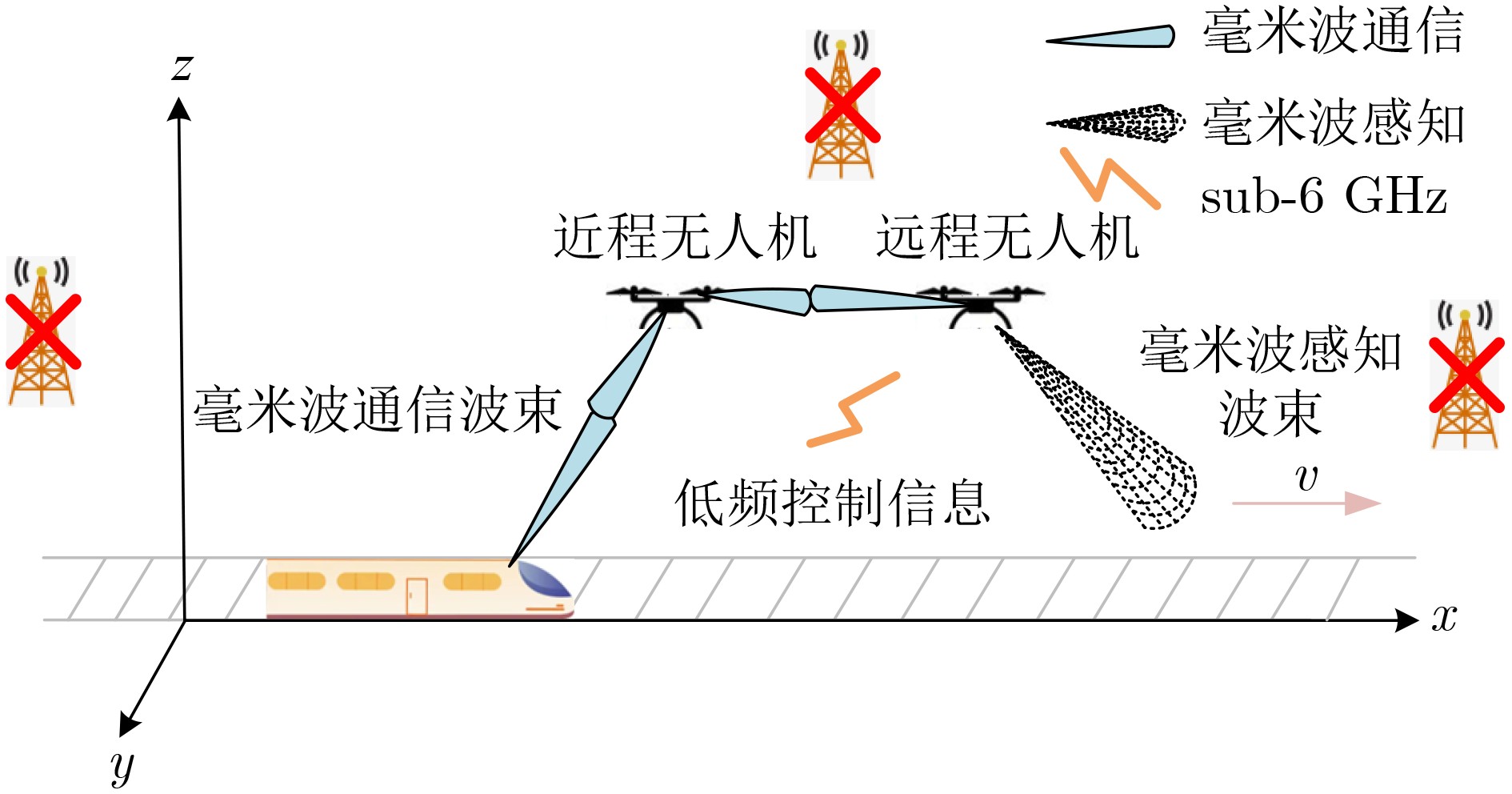
摘要: 面向恶劣自然环境下地面基础设施受损的铁路场景,该文提出一种无人机(UAV)通信感知一体化无线接入网络架构,实现对列车运行环境的实时感知及应急信息回传。考虑到无人机的续航能力有限,通过建立列车制动距离模型与无人机能耗模型,在满足信息回传通信性能与列车环境感知需求的情况下,联合调整无人机飞行速度和通信发射功率以优化无人机整体能耗。通过分析发现,该优化问题符合马尔可夫决策过程(MDP),基于此,提出一种基于深度双Q网络(DDQN)的无人机通信感知一体化无线资源智能分配算法解决上述问题。最后,该文对所提算法的收敛性能、无人机环境感知距离和无人机能耗进行了仿真实验。仿真结果显示,所提算法具有良好的收敛性能,在满足铁路应急场景环境感知及信息回传需求的同时,能够最大化无人机通信作业时长。Abstract: In railway emergency scenarios with ground infrastructure vulnerable to damage from harsh natural environments, an Unmanned Aerial Vehicle (UAV) integrated communication and sensing wireless access network architecture is proposed in this paper, enabling real-time environmental sensing and information backhaul. Given the limited endurance of UAVs, a train braking distance model and a UAV energy consumption model are established, which are then jointly utilized to adjust the UAV flight speed and communication transmit power, optimizing overall UAV energy consumption while satisfying communication performance requirements during information backhaul and environmental sensing. Analysis reveals that this optimization problem conforms to the Markov Decision Process (MDP). Consequently, an intelligent wireless resource allocation algorithm for UAV integrated communication and sensing, grounded in the Double Deep Q Network (DDQN), is proposed to tackle the problem. The simulation results demonstrate that the proposed algorithm exhibits excellent convergence performance and maximizes the operational duration of UAV communications, while meeting the requirements for environmental sensing and information backhaul in railway emergency scenarios.
-
表 1 仿真参数设置
参数名 参数值 参数名 参数值 无人机重量(Newton) 20 近程无人机初始速度(m/s) 15 转子半径(m) 0.4 远程无人机初始位置(m) (800,0) 叶片角速度(rad/s) 300 远程无人机初始速度(m/s) 15 转子叶片的叶尖速度(m/s) 120 tacc(s) 60 悬停时平均转子诱导速度(m/s) 4.03 tdec(s) 80 感应功率增量修正系数 0.1 tstop(s) 100 剖面阻力系数 0.012 列车最大速度(m/s) 45 机身阻力比 0.6 无人机最大速度(m/s) 50 空气密度(kg/m3) 1.225 感知模式切换速度(m/s) 35 转子坚固度 0.005 载波频率(GHz) 28 转子盘面积(m2) 0.503 带宽(MHz) 200 无人机飞行高度(m) 60 噪声功率密度(dBm/Hz) –174[11] 列车初速位置(m) (0,0) 通信性能门限值(dB) 10 列车初始速度(m/s) 15 发射增益(dB) 6 近程无人机初始位置(m) (500,0) 接收增益 (dB) 6 $ \eta_1 $ 0.4 $\eta_{2} $ 0.6  下载: 导出CSV
下载: 导出CSV
-
[1] 何励励. 高铁毫米波通信与雷达探测波束赋形技术[D]. [硕士论文], 西南交通大学, 2017.HE Lili. Millimeter wave beamforming in communication and disaster detection for HSR[D]. [Master dissertation], Southwest Jiaotong University, 2017. [2] 谢庆楚. 一体化综合视频监控技术在南崇高速铁路的应用[J]. 铁路通信信号工程技术, 2023, 20(9): 54–60. doi: 10.3969/j.issn.1673-4440.2023.09.011.XIE Qingchu. Application of integrated video monitoring technology in nanning-chongzuo high-speed railway[J]. Railway Signalling & Communication Engineering, 2023, 20(9): 54–60. doi: 10.3969/j.issn.1673-4440.2023.09.011. [3] SHI Hongtong, ZHAO Jimin, and MU Ruihou. Design and implementation of laser radar-based railway foreign object intrusion detection system[C]. Proceedings of the 2023 5th International Conference on Electronics and Communication, Network and Computer Technology (ECNCT), Guangzhou, China, 2023: 304–307. doi: 10.1109/ECNCT59757.2023.10280974. [4] FOSALAU C, ZET C, and PETRISOR D. Implementation of a landslide monitoring system as a wireless sensor network[C]. Proceedings of the 2016 IEEE 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, USA, 2016: 1–6. doi: 10.1109/UEMCON.2016.7777813. [5] 胡昊. 面向高铁运行环境安全的侵限监测关键技术研究[D]. [博士论文], 中国铁道科学研究院, 2022. doi: 10.27369/d.cnki.gtdky.2022.000005.HU Hao. Research on key technologies of intrusion monitoring for high-speed rail running environment safety[D]. [Ph. D. dissertation], China Academy of Railway Sciences, 2022. doi: 10.27369/d.cnki.gtdky.2022.000005. [6] ZENG Yong, ZHANG Rui, and LIM T J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges[J]. IEEE Communications Magazine, 2016, 54(5): 36–42. doi: 10.1109/MCOM.2016.7470933. [7] WANG Yibing, NIU Yong, WU Hao, et al. Scheduling of UAV-assisted millimeter wave communications for high-speed railway[J]. IEEE Transactions on Vehicular Technology, 2022, 71(8): 8756–8767. doi: 10.1109/TVT.2022.3176855. [8] DAI Xingxia, XIAO Zhu, JIANG Hongbo, et al. UAV-assisted task offloading in vehicular edge computing networks[J]. IEEE Transactions on Mobile Computing, 2024, 23(4): 2520–2534. doi: 10.1109/TMC.2023.3259394. [9] DONG Jiong, OTA K, and DONG Mianxiong. UAV-based real-time survivor detection system in post-disaster search and rescue operations[J]. IEEE Journal on Miniaturization for Air and Space Systems, 2021, 2(4): 209–219. doi: 10.1109/JMASS.2021.3083659. [10] FENG Zhiyong, FANG Zixi, WEI Zhiqing, et al. Joint radar and communication: A survey[J]. China Communications, 2020, 17(1): 1–27. doi: 10.23919/JCC.2020.01.001. [11] ZHANG Qixun, WANG Xinna, LI Zhenhao, et al. Design and performance evaluation of joint sensing and communication integrated system for 5G mmwave enabled CAVs[J]. IEEE Journal of Selected Topics in Signal Processing, 2021, 15(6): 1500–1514. doi: 10.1109/JSTSP.2021.3109666. [12] YANG Jianfei, CHEN Xinyan, ZOU Han, et al. Efficientfi: Toward large-scale lightweight wifi sensing via CSI compression[J]. IEEE Internet of Things Journal, 2022, 9(15): 13086–13095. doi: 10.1109/JIOT.2021.3139958. [13] ZHOU Yige, LIU Xin, ZHAI Xiangping, et al. UAV-enabled integrated sensing, computing, and communication for internet of things: Joint resource allocation and trajectory design[J]. IEEE Internet of Things Journal, 2024, 11(7): 12717–12727. doi: 10.1109/JIOT.2023.3335937. [14] SUN Geng, LI Jiahui, LIU Yanheng, et al. Time and energy minimization communications based on collaborative beamforming for UAV networks: A multi-objective optimization method[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(11): 3555–3572. doi: 10.1109/JSAC.2021.3088720. [15] JU Ying, WANG Haoyu, CHEN Yuchao, et al. Deep reinforcement learning based joint beam allocation and relay selection in mmwave vehicular networks[J]. IEEE Transactions on Communications, 2023, 71(4): 1997–2012. doi: 10.1109/TCOMM.2023.3240754. [16] VAN HASSELT H, GUEZ A, and SILVER D. Deep reinforcement learning with double Q-learning[C]. Proceedings of the 30th AAAI Conference on Artificial Intelligence, Phoenix, USA, 2016: 2094–2100. doi: 10.1609/aaai.v30i1.10295. [17] YAN Li, FANG Xuming, LI Saifei, et al. DRL based beam management for joint sensing and communications in HSR mmWave wireless networks[C]. Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 2022: 1–6. doi: 10.1109/VTC2022-Spring54318.2022.9860354. [18] 曹霞. CRH2-300型动车组的牵引/制动性能研究[D]. [硕士论文], 西南交通大学, 2010.CAO Xia. The research on CRH2-300 emu's traction/braking performance[D]. [Master dissertation], Southwest Jiaotong University, 2010. [19] ZENG Yong, XU Jie, and ZHANG Rui. Energy minimization for wireless communication with rotary-wing UAV[J]. IEEE Transactions on Wireless Communications, 2019, 18(4): 2329–2345. doi: 10.1109/TWC.2019.2902559. [20] 闫莉, 方旭明, 李毅, 等. 面向高铁毫米波通信智能资源管理研究综述[J]. 电子与信息学报, 2023, 45(8): 2806–2817. doi: 10.11999/JEIT220923.YAN Li, FANG Xuming, LI Yi, et al. Overview on intelligent wireless resource management of millimeter wave communications under high-speed railway[J]. Journal of Electronics & Information Technology, 2023, 45(8): 2806–2817. doi: 10.11999/JEIT220923. [21] MNIH V, KAVUKCUOGLU K, SILVER D, et al. Human-level control through deep reinforcement learning[J]. Nature, 2015, 518(7540): 529–533. doi: 10.1038/nature14236. [22] JEON H M, LIM J W, and RYOO C. Task assignment for multiple multi-purpose unmanned aerial vehicles using greedy algorithm[J]. International Journal of Aeronautical and Space Sciences, 2024. doi: 10.1007/s42405-024-00726-4. -

 下载:
下载:










图(9) / 表(1)
计量
- 文章访问数: 1193
- HTML全文浏览量: 1053
- PDF下载量: 131
- 被引次数: 0
