

Student’s t Inverse Wishart Smoothing Algorithm for Extended Target Tracking
-
摘要: 脉冲干扰和离群量测信息等因素通常会导致异常的厚尾噪声,这使得以高斯假设为前提的扩展目标跟踪(ETT)估计器的性能急剧降低,针对该问题该文提出一种基于扩展目标随机矩阵模型(RMM)的Student’s t逆Wishart平滑(StIWS)算法。首先,将目标的运动状态以及过程噪声和量测噪声建模为Student’s t分布以表征异常噪声对扩展目标概率分布的影响,将目标扩展状态建模为服从逆Wishart分布的随机矩阵。然后,在Student’s t贝叶斯平滑框架下,详细推导了能在扩展目标的多重特征动态演变的过程中有效估计目标状态的StIWS算法。最后,通过扩展目标跟踪的仿真实验结果和真实场景实验结果验证了所提算法的有效性。
-
关键词:
- 扩展目标跟踪 /
- Student’s t平滑 /
- 逆Wishart分布 /
- 厚尾噪声
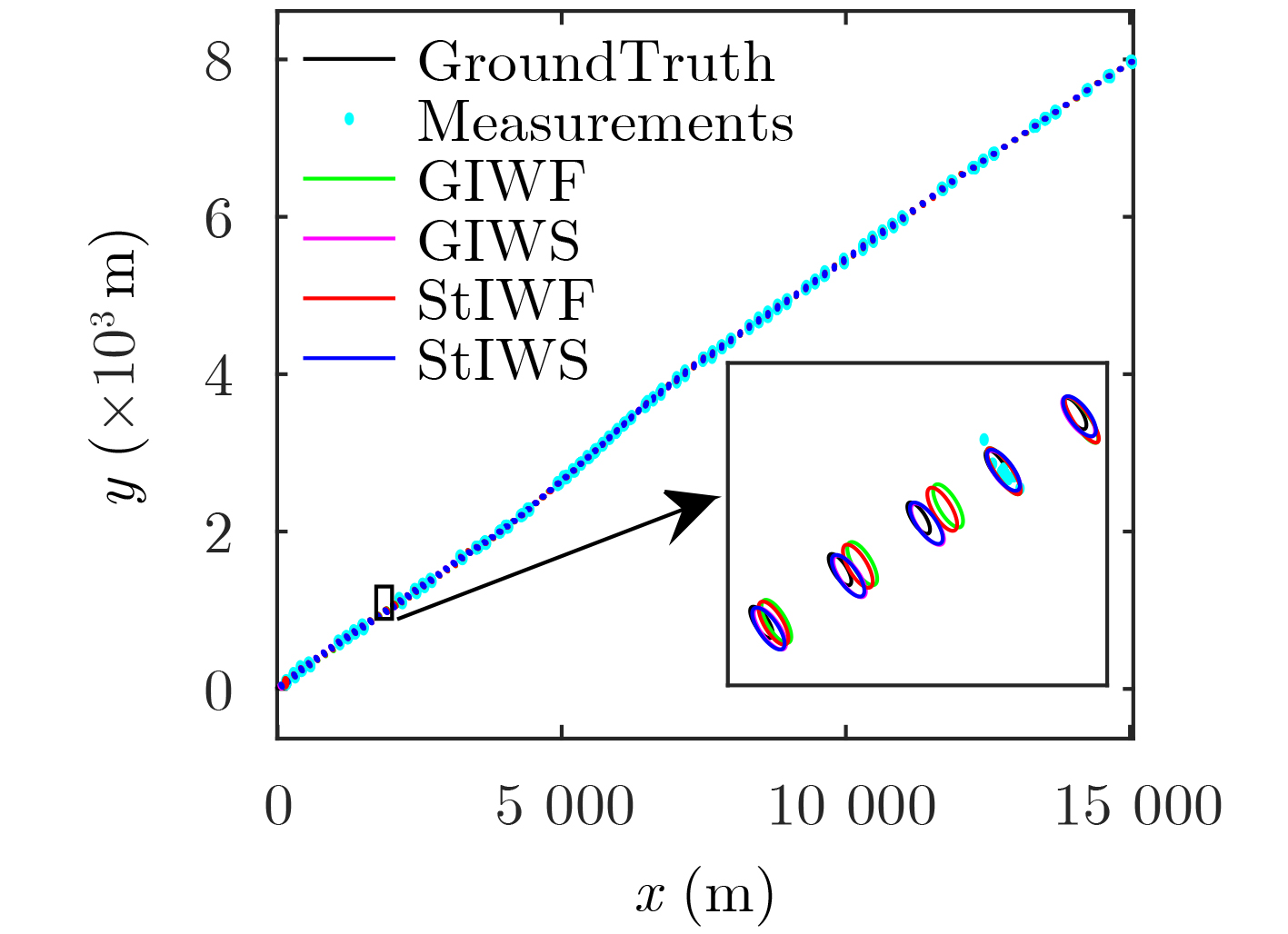
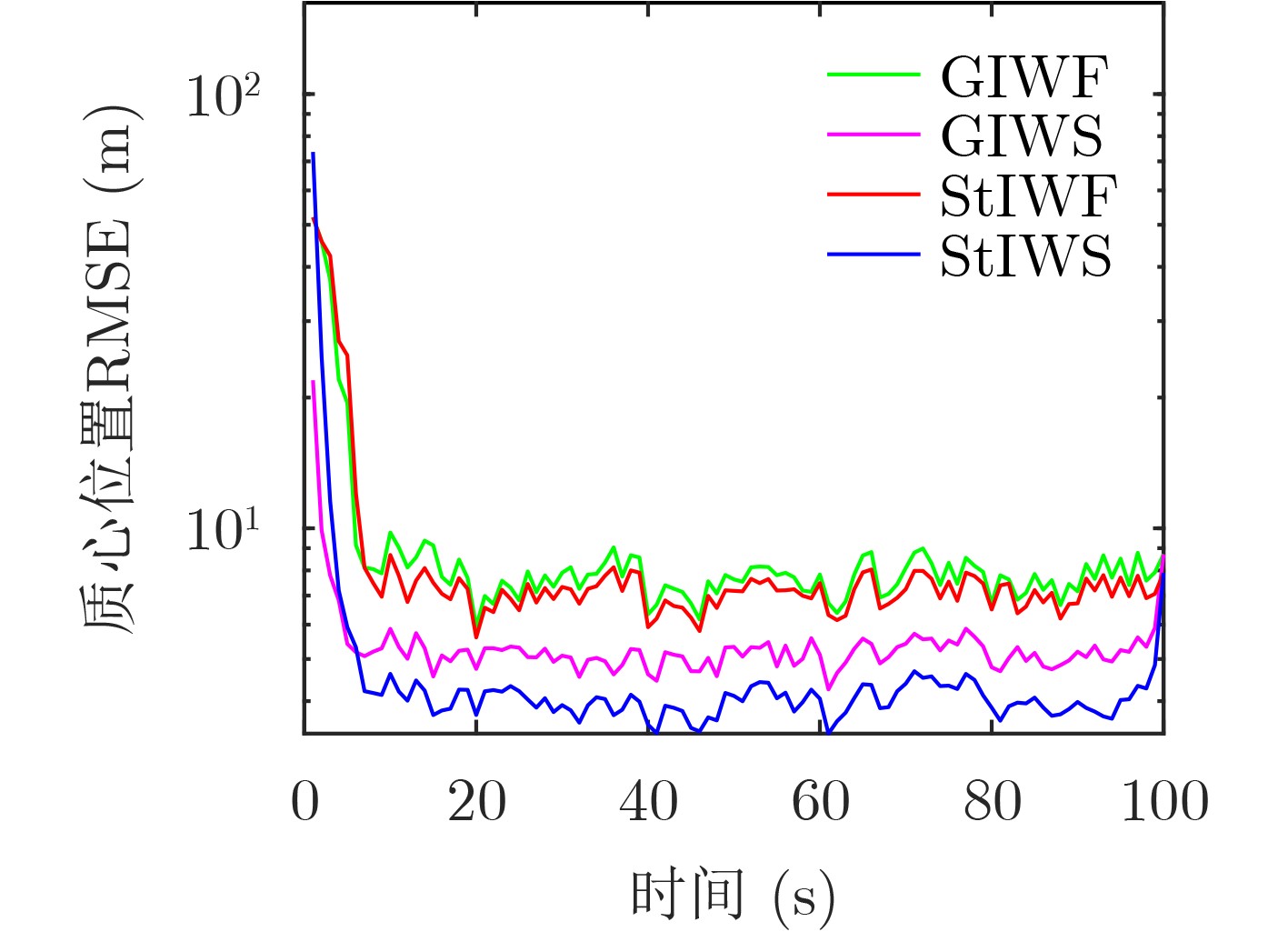
Abstract: Elements such as pulse interference and outlier measurement information usually lead to abnormal heavy-tailed noise, which sharply reduces the performance of the Extended Target Tracking (ETT) estimator based on the Gaussian hypothesis. To address this problem, a Student’s t Inverse Wishart Smoothing (StIWS) algorithm based on the Random Matrix Model (RMM) is proposed. Firstly, the kinematic state of the target, process noise and measurement noise are modeled as a Student’s t distribution to characterize the effect of anomalous noise on the probability distribution of extended target, and the extended state of target is modeled as a random matrix which obeys inverse Wishart distribution. Then, in a Student’s t bayesian smoothing frame, the StIWS algorithm is derived in detail, which can effectively estimate target state in the process of the dynamic evolution of multiple characteristics of extended target. Finally, the effectiveness of the proposed algorithm is verified by the simulation experiment and the engineering experiment of extended target tracking. -
[1] WANG Yi, CHEN Xin, GONG Chao, et al. Non-ellipsoidal infrared group/extended target tracking based on Poisson multi-Bernoulli mixture filter and B-spline[J]. Remote Sensing, 2023, 15(3): 606. doi: 10.3390/rs15030606. [2] GRANSTROM K, BAUM M, and REUTER S. Extended object tracking: Introduction, overview, and applications[J]. Journal of Advances in Information Fusion, 2017, 12(2): 139–174. [3] 陈辉, 曾文爱, 连峰, 等. 水平集高斯过程的非星凸形扩展目标跟踪算法[J]. 电子与信息学报, 2023, 45(10): 3786–3795. doi: 10.11999/JEIT220997.CHEN Hui, ZENG Wen’ai, LIAN Feng, et al. Non-star-convex extended target tracking algorithm for level-set gaussian process[J]. Journal of Electronics & Information Technology, 2023, 45(10): 3786–3795. doi: 10.11999/JEIT220997. [4] LI Qinlei, SONG Liping, and ZHANG Yongquan. Multiple extended target tracking by truncated JPDA in a clutter environment[J]. IET Signal Processing, 2021, 15(3): 207–219. doi: 10.1049/sil2.12024. [5] ZHANG Desheng, LI Wujun, YANG Shixing, et al. Multi-frame track-before-detect for scalable extended target tracking[C]. 2022 25th International Conference on Information Fusion (FUSION), Linköping, Sweden, 2022: 1–8. doi: 10.23919/FUSION49751.2022.9841326. [6] GRANSTRÖM K, FATEMI M, and SVENSSON L. Poisson multi-Bernoulli mixture conjugate prior for multiple extended target filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(1): 208–225. doi: 10.1109/TAES.2019.2920220. [7] LI Guchong, LI Gang, and HE You. Distributed GGIW-CPHD-based extended target tracking over a sensor network[J]. IEEE Signal Processing Letters, 2022, 29: 842–846. doi: 10.1109/LSP.2022.3158589. [8] MEMON S A, KIM W G, PARK M S, et al. Rauch-Tung-Striebel smoothing linear multi-target tracking in clutter[J]. IEEE Access, 2022, 10: 3007–3016. doi: 10.1109/ACCESS.2021.3134987. [9] GRANSTRÖM K and BRAMSTÅNG J. Bayesian smoothing for the extended object random matrix model[J]. IEEE Transactions on Signal Processing, 2019, 67(14): 3732–3742. doi: 10.1109/TSP.2019.2920471. [10] SÄRKKÄ S. Bayesian Filtering and Smoothing[M]. Cambridge: Cambridge University Press, 2013: 134–164. doi: 10.1017/CBO9781139344203. [11] ZHANG Qichun and ZHOU Yuyang. Recent advances in non-Gaussian stochastic systems control theory and its applications[J]. International Journal of Network Dynamics and Intelligence, 2022, 1(1): 111–119. doi: 10.53941/ijndi0101010. [12] WU Hao, CHEN Shuxin, YANG Binfeng, et al. Robust derivative-free cubature Kalman filter for bearings-only tracking[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(8): 1865–1870. doi: 10.2514/1.G001686. [13] HUANG Yulong, ZHANG Yonggang, LI Ning, et al. A novel robust Student's t-based Kalman filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1545–1554. doi: 10.1109/TAES.2017.2651684. [14] XU Dingjie, SHEN Chen, and SHEN Feng. A robust particle filtering algorithm with non-Gaussian measurement noise using student-t distribution[J]. IEEE Signal Processing Letters, 2014, 21(1): 30–34. doi: 10.1109/LSP.2013.2289975. [15] KARLGAARD C D. Nonlinear regression Huber-Kalman filtering and fixed-interval smoothing[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(2): 322–330. doi: 10.2514/1.G000799. [16] WANG Hongwei, LI Hongbin, ZHANG Wei, et al. Derivative-free Huber-Kalman smoothing based on alternating minimization[J]. Signal Processing, 2019, 163: 115–122. doi: 10.1016/j.sigpro.2019.05.011. [17] WANG Guoqing, ZHANG Yonggang, and WANG Xiaodong. Maximum correntropy Rauch–Tung–Striebel smoother for nonlinear and non-Gaussian systems[J]. IEEE Transactions on Automatic Control, 2021, 66(3): 1270–1277. doi: 10.1109/TAC.2020.2997315. [18] HE Jiacheng, WANG Hongwei, WANG Gang, et al. Minimum error entropy Rauch–Tung–Striebel smoother[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 8901–8914. doi: 10.1109/TAES.2023.3312057. [19] ARAVKIN A Y, BELL B M, BURKE J V, et al. An ℓ1-laplace robust Kalman smoother[J]. IEEE Transactions on Automatic Control, 2011, 56(12): 2898–2911. doi: 10.1109/TAC.2011.2141430. [20] HUANG Yulong, ZHANG Yonggang, LI Ning, et al. A robust Student's t based cubature filter[C]. 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 2016: 9–16. [21] HUANG Yulong, ZHANG Yonggang, LI Ning, et al. Robust student’s t based nonlinear filter and smoother[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(5): 2586–2596. doi: 10.1109/TAES.2016.150722. [22] WANG Jian, ZHANG Tao, JIN Bonan, et al. Student’s t-based robust Kalman filter for a SINS/USBL integration navigation strategy[J]. IEEE Sensors Journal, 2020, 20(10): 5540–5553. doi: 10.1109/JSEN.2020.2970766. [23] HUANG Yulong, ZHANG Yonggang, ZHAO Yuxin, et al. Robust Rauch-Tung-Striebel smoothing framework for heavy-tailed and/or skew noises[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(1): 415–441. doi: 10.1109/TAES.2019.2914520. [24] ROTH M, ARDESHIRI T, ÖZKAN E, et al. Robust Bayesian filtering and smoothing using student's t distribution[EB/OL].https://arxiv.org/abs/1703.02428, 2017. [25] KARTAL S E. Variational smoothing for extended target tracking with random matrices[D]. [Master dissertation], Middle East Technical University, 2022. [26] BAUM M and HANEBECK U D. Extended object tracking with random hypersurface models[J]. IEEE Transactions on Aerospace and Electronic systems, 2014, 50(1): 149–159. doi: 10.1109/TAES.2013.120107. [27] WAHLSTRÖM N and ÖZKAN E. Extended target tracking using Gaussian processes[J]. IEEE Transactions on Signal Processing, 2015, 63(16): 4165–4178. doi: 10.1109/TSP.2015.2424194. [28] ZEA A, FAION F, BAUM M, et al. Level-set random hypersurface models for tracking nonconvex extended objects[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(6): 2990–3007. doi: 10.1109/TAES.2016.130704. [29] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042–1059. doi: 10.1109/TAES.2008.4655362. [30] FELDMANN M, FRÄNKEN D, and KOCH W. Tracking of extended objects and group targets using random matrices[J]. IEEE Transactions on Signal Processing, 2011, 59(4): 1409–1420. doi: 10.1109/TSP.2010.2101064. [31] LAN Jian and LI X R. Extended-object or group-target tracking using random matrix with nonlinear measurements[J]. IEEE Transactions on Signal Processing, 2019, 67(19): 5130–5142. doi: 10.1109/TSP.2019.2935866. [32] 陈辉, 王莉, 韩崇昭. 基于随机矩阵建模的Student’s t逆Wishart滤波器[J]. 控制理论与应用, 2022, 39(6): 1088–1097. doi: 10.7641/CTA.2022.11108.CHEN Hui, WANG Li, and HAN Chongzhao. Student’s t inverse Wishart filter based on random matrix modeling[J]. Control Theory & Applications, 2022, 39(6): 1088–1097. doi: 10.7641/CTA.2022.11108. [33] KOTZ S and NADARAJAH S. Multivariate t-Distributions and Their Applications[M]. Cambridge: Cambridge University Press, 2004: 4–68. doi: 10.1017/CBO9780511550683. [34] ROTH M, ÖZKAN E, and GUSTAFSSON F. A Student's t filter for heavy tailed process and measurement noise[C]. IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, Canada, 2013: 5770–5774. doi: 10.1109/ICASSP.2013.6638770. [35] YANG Shishan, BAUM M, and GRANSTRÖM K. Metrics for performance evaluation of elliptic extended object tracking methods[C]. 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Baden-Baden, Germany, 2016: 523–528. doi: 10.1109/MFI.2016.7849541. [36] GIVENS C R and SHORTT R M. A class of Wasserstein metrics for probability distributions[J]. Michigan Mathematical Journal, 1984, 31(2): 231–240. doi: 10.1307/mmj/1029003026. [37] HARRIS C and STEPHENS M. A combined corner and edge detector[C]. Alvey Vision Conference, Manchester, UK, 1988: 23.1–23.6. doi: 10.5244/C.2.23. [38] CHEN Shuhan, ZHONG Shengwei, XUE Bai, et al. Iterative scale-invariant feature transform for remote sensing image registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(4): 3244–3265. doi: 10.1109/TGRS.2020.3008609. [39] TUNCER B and ÖZKAN E. Random matrix based extended target tracking with orientation: A new model and inference[J]. IEEE Transactions on Signal Processing, 2021, 69: 1910–1923. doi: 10.1109/TSP.2021.3065136. -

 下载:
下载:







图(7)
计量
- 文章访问数: 763
- HTML全文浏览量: 442
- PDF下载量: 60
- 被引次数: 0
