

Electromagnetic Algorithm for Efficiently Analyzing Large Scale Antenna Arrays with Radomes
-
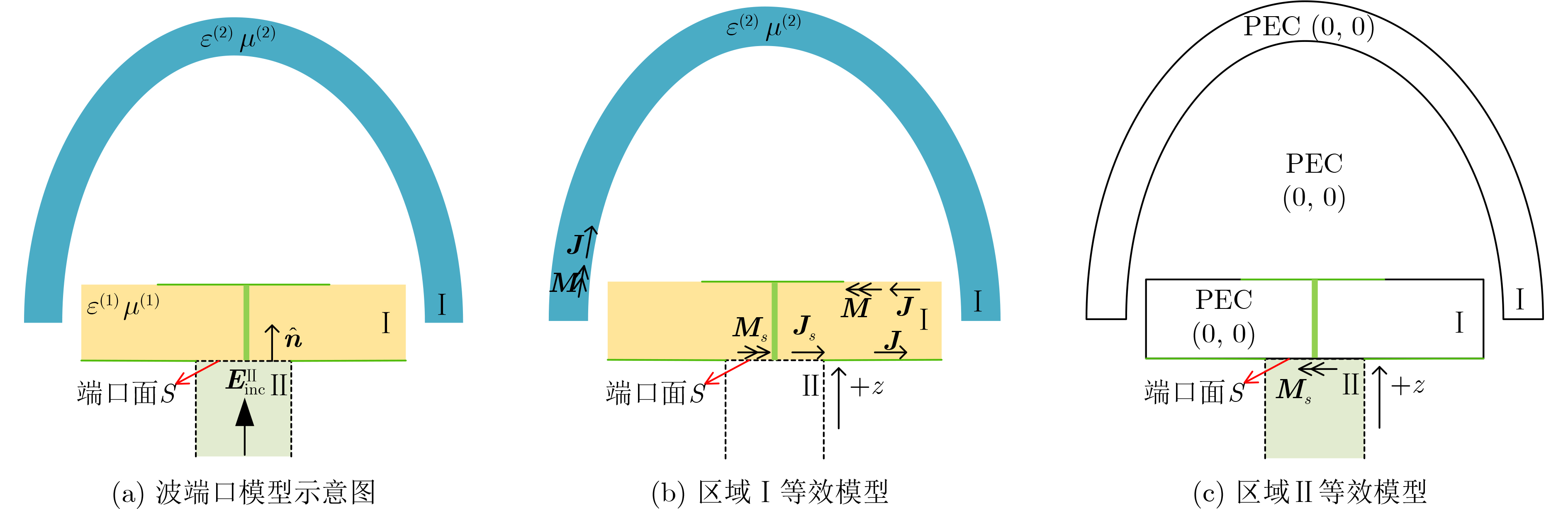
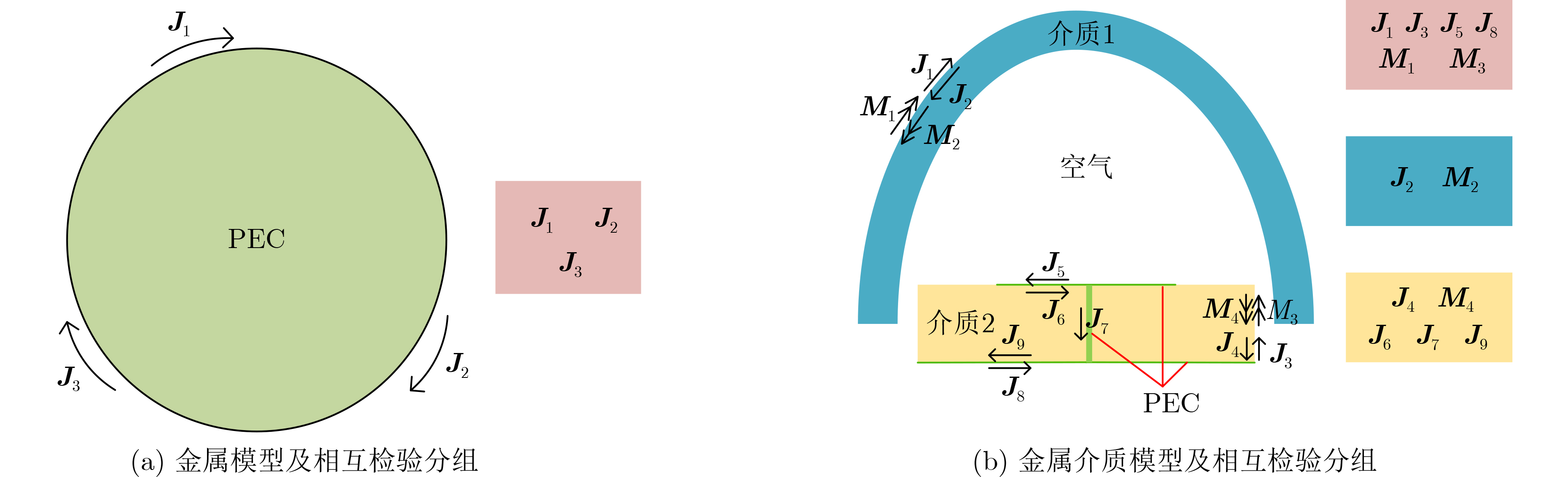
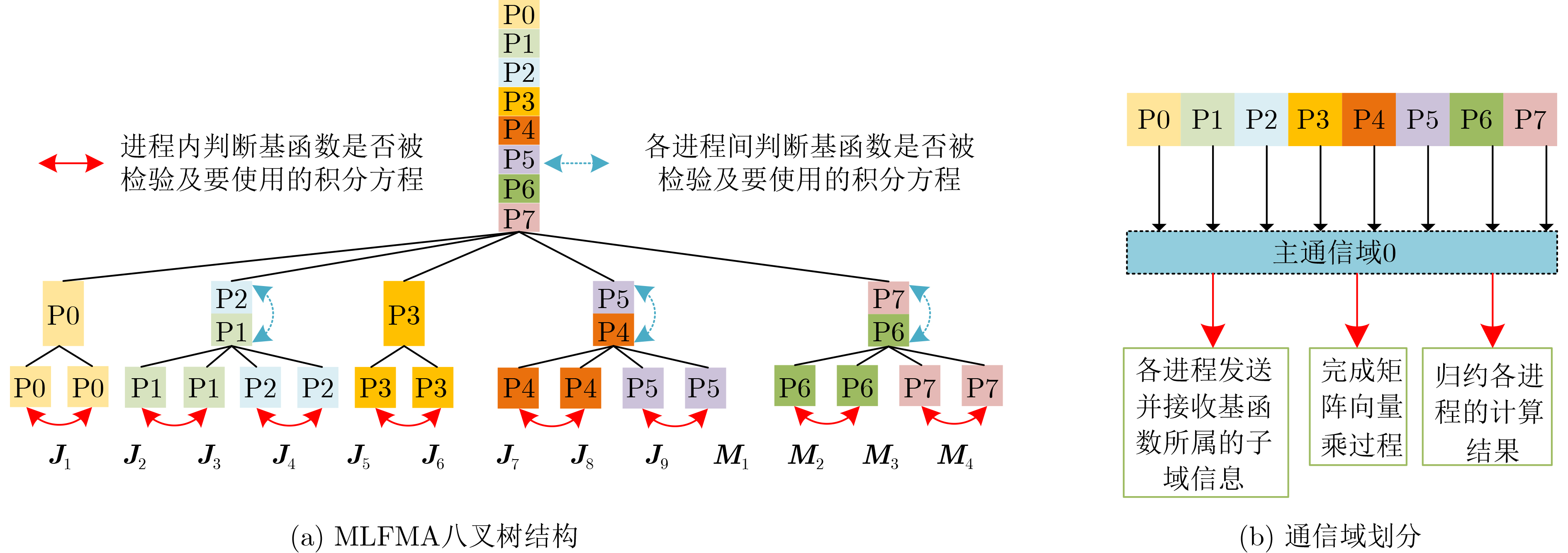
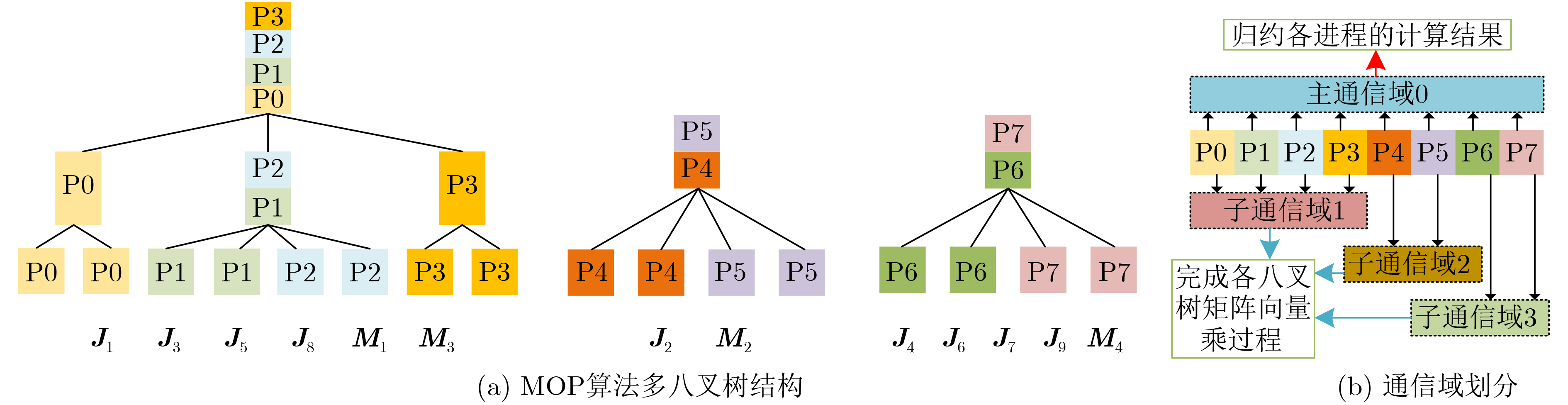
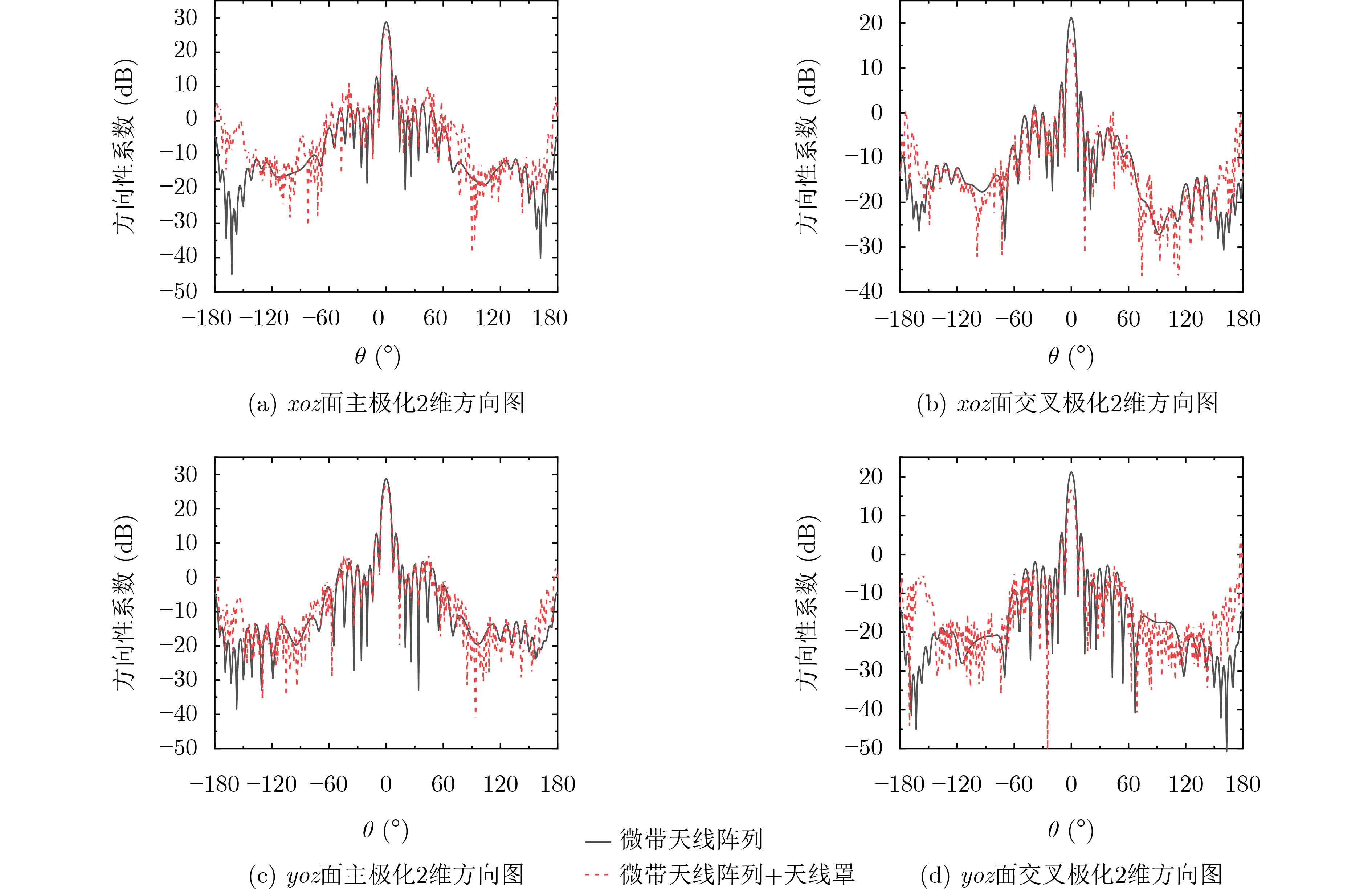
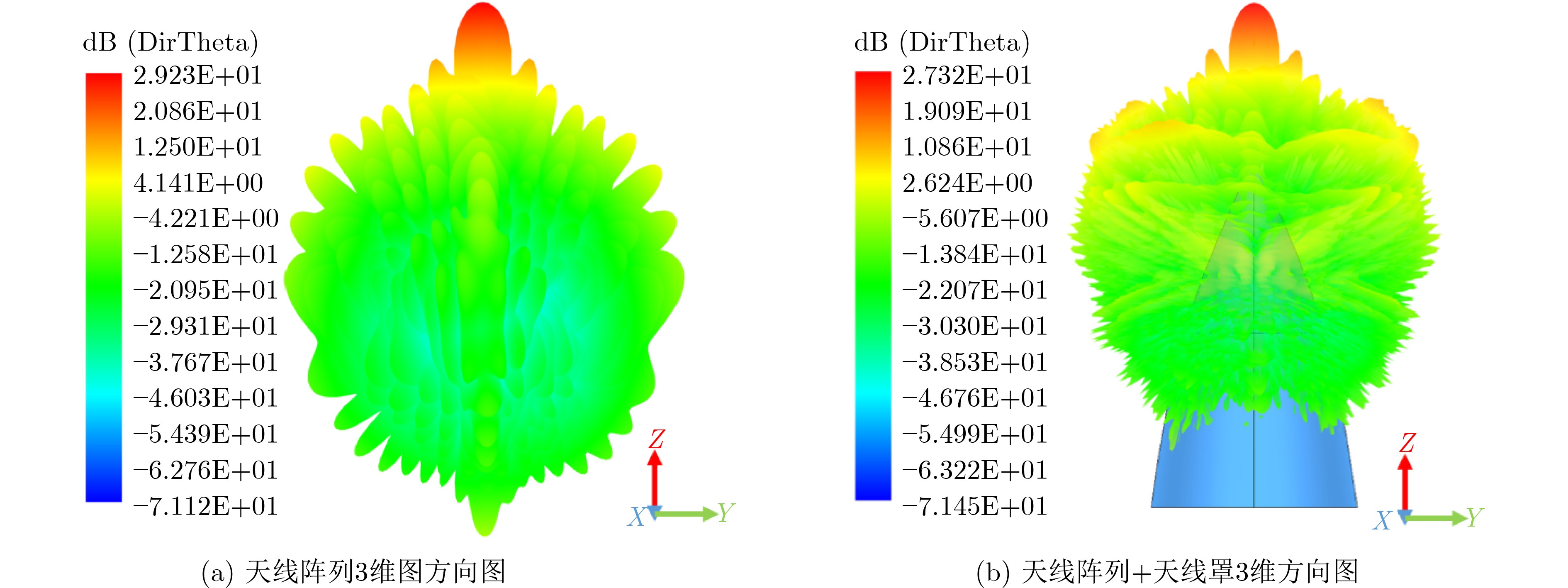
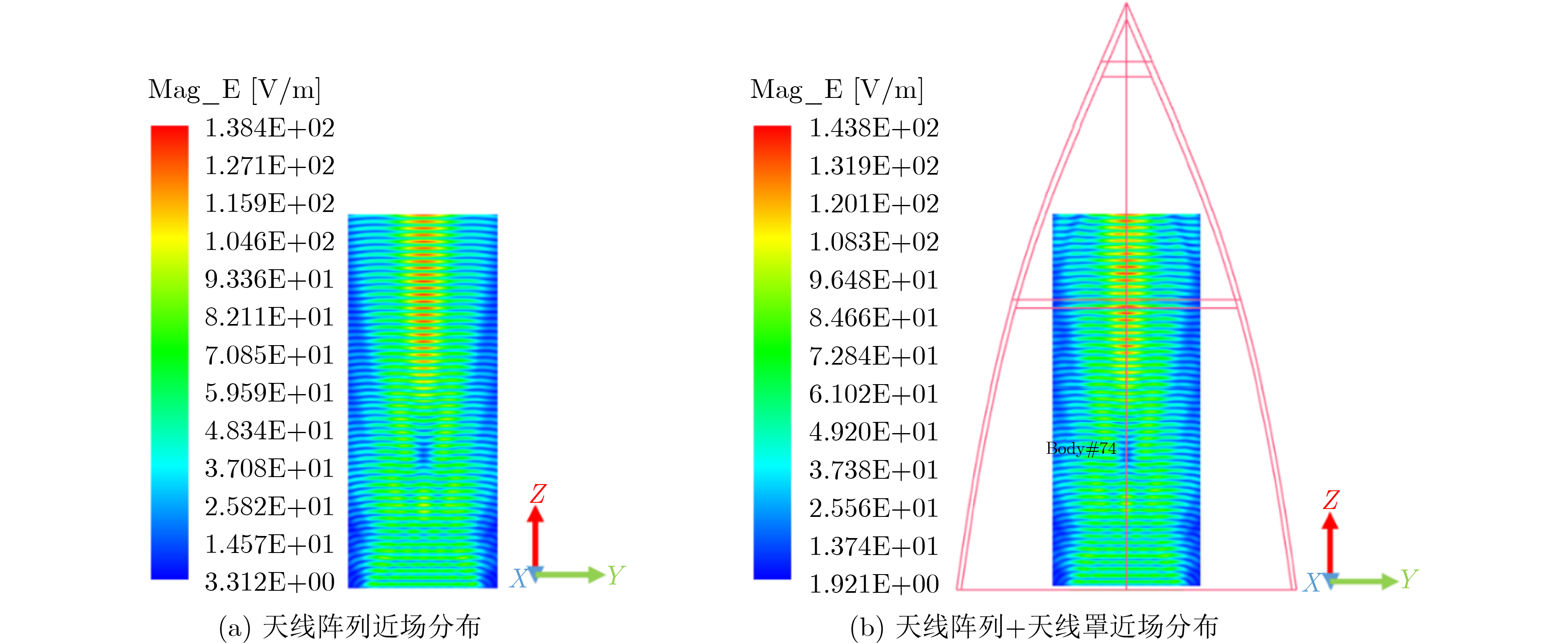
摘要: 针对大型带罩天线阵列系统的辐射特性仿真问题,基于等效原理和波导模式匹配法,建立了多层快速多极子算法的波端口模型,实现了对天线激励源和匹配负载的精确电磁建模,同时提出了一种适用于计算金属介质天线模型的多层快速多极子算法并行策略,通过建立多棵八叉树结构降低了计算过程中各进程间的通信量,实现了对大型带罩天线阵列系统的精确、高效一体化仿真计算。通过与高阶矩量法及有限元-边界积分方程法计算得到的天线方向图、S参数进行对比,验证了该方法的精确性及高效性。Abstract: For the analysis problem of large antenna arrays with radomes, based on the equivalence principle and mode matching theory, the wave port model of Multilevel Fast Multipole Algorithm (MLFMA) is established, and the accurate electromagnetic modeling of antenna excitation source and matching load is realized. Moreover, a parallel strategy of MLFMA for calculating metal-dielectric antenna models is proposed. By establishing multiple octree structures, the communication in processes during the calculation is reduced, and the accurate and efficient analysis of large antenna-array-and-radome-integration system is realized. A comparison of the antenna pattern and S parameters calculated by the proposed algorithm, the higher order method of moments and the finite element-boundary integral is given, validating accuracy and efficiency of the proposed method.
-
表 1 波导缝隙天线加天线罩计算资源消耗对比表
使用算法 未知量 核数 收敛残差/迭代步数 峰值内存(GB) 计算时间(s) MLFMA 2 209 604 48 0.001 / 53 312.79 1228.15 HOMoM 507 197 576 – / – 3833.31 20768.08 FE-BI 18 742 186 192 0.001 / 613 3363.30 11548.15  下载: 导出CSV
下载: 导出CSV
-
[1] MONEUM M A A, SHEN Z, VOLAKIS J L, et al. Hybrid PO-MoM analysis of large axi-symmetric radomes[J]. IEEE Transactions on Antennas and Propagation, 2001, 49(12): 1657–1666. doi: 10.1109/8.982444. [2] AN Yuyuan and CHEN Ruishan. A fast hybrid method for EM analysis of electrically large metal space frame radomes[J]. IEEE Antennas and Wireless Propagation Letters, 2014, 13: 1124–1127. doi: 10.1109/LAWP.2014.2327957. [3] WANG Binbin, HE Mang, LIU Jinbo, et al. Fast and efficient analysis of radome-enclosed antennas in receiving mode by an iterative-based hybrid integral equation/modified surface integration method[J]. IEEE Transactions on Antennas and Propagation, 2017, 65(5): 2436–2445. doi: 10.1109/TAP.2017.2676718. [4] ZHAI Chang, ZHAO Xunwang, LIN Zhongchao, et al. Integrated analysis and optimization of the large airborne radome-enclosed antenna system[J]. ACES Journal, 2020, 35(10): 1192–1199. doi: 10.47037/2020.ACES.J.351012. [5] YOU Jianwei, TAN Shurun, ZHOU Xiaoyang, et al. A new method to analyze broadband antenna-radome interactions in time-domain[J]. IEEE Transactions on Antennas and Propagation, 2014, 62(1): 334–344. doi: 10.1109/TAP.2013.2290548. [6] YANG Minglin, GAO Hongwei, and SHENG Xinqing. Parallel domain-decomposition-based algorithm of hybrid FE-BI-MLFMA method for 3-D scattering by large inhomogeneous objects[J]. IEEE Transactions on Antennas and Propagation, 2013, 61(9): 4675–4684. doi: 10.1109/TAP.2013.2271232. [7] YANG Zeng, YUAN Xiaowei, HUANG Xiaowei, et al. Resistive sheet boundary condition-based nonconformal domain decomposition FE-BI-MLFMA for electromagnetic scattering from inhomogeneous objects with honeycomb structures[J]. IEEE Transactions on Antennas and Propagation, 2022, 70(10): 9483–9496. doi: 10.1109/TAP.2022.3177565. [8] YANG Xiong, JIANG Ming, SHEN Liang, et al. A flexible FEM-BEM-DDM for EM scattering by multiscale anisotropic objects[J]. IEEE Transactions on Antennas and Propagation, 2021, 69(12): 8562–8573. doi: 10.1109/TAP.2021.3091196. [9] HE Weijia, YANG Zeng, HUANG Xiaowei, et al. Solving electromagnetic scattering problems with tens of billions of unknowns using GPU accelerated massively parallel MLFMA[J]. IEEE Transactions on Antennas and Propagation, 2022, 70(7): 5672–5682. doi: 10.1109/TAP.2022.3161520. [10] FOSTIER J and OLYSLAGER F. An asynchronous parallel MLFMA for scattering at multiple dielectric objects[J]. IEEE Transactions on Antennas and Propagation, 2008, 56(8): 2346–2355. doi: 10.1109/TAP.2008.926787. [11] HARRINGTON R F. Field Computation by Moment Methods[M]. Piscataway: IEEE Press, 1993: 52. [12] COIFMAN R, ROKHLIN V, and WANDZURA S. The fast multipole method for the wave equation: A pedestrian prescription[J]. IEEE Antennas and Propagation Magazine, 1993, 35(3): 7–12. doi: 10.1109/74.250128. [13] MAUTZ J R and HARRINGTON R F. Electromagnetic scattering from a homogeneous material body of revolution[J]. Archiv fuer Elektronik und Uebertragungstechnik, 1979, 33(2): 71–80. [14] RAO S, WILTON D, and GLISSON A. Electromagnetic scattering by surfaces of arbitrary shape[J]. IEEE Transactions on Antennas and Propagation, 1982, 30(3): 409–418. doi: 10.1109/TAP.1982.1142818. [15] YANG Minglin, DU Yulin, and SHENG Xinqing. Solving Electromagnetic Scattering Problems with Over 10 Billion Unknowns with the Parallel MLFMA[C]. Proceedings of 2019 Photonics & Electromagnetics Research Symposium, Xiamen, China, 2019: 355–360. doi: 10.1109/PIERS-Fall48861.2019.9021504. [16] HE Weijia, HUANG Xiaowei, YANG Minglin, et al. Massively parallel multilevel fast multipole algorithm for extremely large-scale electromagnetic simulations: A review[J]. Progress In Electromagnetics Research, 2022, 173: 37–52. doi: 10.2528/PIER22011202. [17] ZHAO Xunwang, TING S W, and ZHANG Yu. Parallelization of half-space MLFMA using adaptive direction partitioning strategy[J]. IEEE Antennas and Wireless Propagation Letters, 2014, 13: 1203–1206. doi: 10.1109/LAWP.2014.2331699. [18] MUMPS[EB/OL].https://mumps-solver.org, 2023. [19] LIN Zhongchao, ZHAO Xunwang, ZHANG Yu, et al. Higher order method of moments analysis of metallic waveguides loaded with composite metallic and dielectric structures[J]. IEEE Transactions on Antennas and Propagation, 2018, 66(9): 4958–4963. doi: 10.1109/TAP.2018.2845539. [20] ZUO Sheng, LIN Zhongchao, DOÑORO D G, et al. A massively parallel preconditioned FEM–BEM method for accurate analysis of complex electromagnetic field problems[J]. IEEE Antennas and Wireless Propagation Letters, 2023, 22(5): 1194–1198. doi: 10.1109/LAWP.2023.3236373. -

 下载:
下载:


图(11) / 表(1)
计量
- 文章访问数: 1241
- HTML全文浏览量: 866
- PDF下载量: 102
- 被引次数: 0
